Haddad W.M. Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach
Подождите немного. Документ загружается.

NonlinearBook10pt November 20, 2007
OPTIMAL INTEGRATOR BACKSTEPPING CONTROL 585
translated to the origin, it follows that the trans lated nonlinear system is
given by
˙x
1
(t) =
σ
2
x
1
(t)(1 − (x
2
(t) + λ)
2
−
1
4
x
2
1
(t)), x
1
(0) = x
10
, t ≥ 0, (9.195)
˙x
2
(t) = −
1
2
x
3
2
−
3
2
λx
2
2
−
3
2
(λ
2
− 1 +
1
2
x
2
1
)x
2
−
3
4
λx
2
1
− x
3
, x
2
(0) = x
20
,
(9.196)
˙x
3
(t) = −u(t), x
3
(0) = x
30
, (9.197)
where λ
△
= Φ
Teq
and u =
1
β
2
(Φ
T
−λ − x
2
).
Our objective is to stabilize the equilibrium (A(t) = 0, Φ(t) = 1,
Ψ(t) = Ψ
CO
+2) by controlling the thr ottle mass flow Φ
T
which is related to
the throttle opening γ
throt
by Φ
T
= γ
throt
√
Ψ [247]. To translate the desired
equilibrium to the origin we apply the linear transformation Φ
s
△
= Φ −1 and
Ψ
s
△
= Ψ − Ψ
CO
−2. Furthermore, in this case,
u =
1
β
2
(Φ
T
− 1 − Φ
s
), (9.198)
and h en ce, with λ = 1, (9.195)–(9.197) yield the transformed nonlinear
system
˙
A(t) = −
σ
2
A(t)[
1
4
A
2
(t) + 2Φ
s
(t) + Φ
2
s
(t)], A(0) = A
0
, t ≥ 0, (9.199)
˙
Φ
s
(t) = −
3
2
Φ
2
s
(t) −
1
2
Φ
3
s
(t) −
3
4
A
2
(t)[1 + Φ
s
(t)] − Ψ
s
(t), Φ
s
(0) = Φ
s
0
,
(9.200)
˙
Ψ
s
(t) = −u(t), Ψ
s
(0) = Ψ
s
0
. (9.201)
Note th at (9.199)–(9.201) has the correct form for the application of
Theorem 9.1 where (9.199) and (9.200) make up the nonlinear subsystem
and Ψ
s
is the integrator state. Specifically, (9.199)–(9.201) can be written
in the form of (9.1) and (9.2) where x = [A Φ
s
]
T
, ˆx = Ψ
s
, and
f(A, Φ
s
) =
−
σ
2
A(
1
4
A
2
+ 2Φ
s
+ Φ
2
s
)
−Φ
s
(
3
2
Φ
s
+
1
2
Φ
2
s
+
3
4
A
2
) −
3
4
A
2
, G(A, Φ
s
) =
0
−1
.
To apply Theorem 9.1 we require a stabilizing feedback for the
subsystem (9.199) and (9.200) and a corresponding Lyapunov function
V
sub
(A, Φ
s
) such that (9.59) and (9.60) are satisfied. For the nonlinear
subsystem (9.199) and (9.200) we choose the Lyapunov function candidate
V
sub
(A, Φ
s
) = εA
4
+ Φ
2
s
, (9.202)
where ε > 0, and the stabilizing feedback control
α(A, Φ
s
) = c
1
Φ
s
−
3
2
Φ
2
s
−
3
4
A
2
− 2εσA
4
, (9.203)
where c
1
≥ 0. I t is straightforward to show that (9.202) and (9.203) satisfy
conditions (9.59)–(9.61) of Theorem 9.1.
NonlinearBook10pt November 20, 2007
586 CHAPTER 9
Applying Theorem 9.1 to the system (9.199)–(9.201) yields the family
of control laws
u = −φ(A, Φ
s
, Ψ
s
) = R
−1
2
h
ˆ
P (Ψ
s
− α(A, Φ
s
)) +
1
2
L
2
(A, Φ
s
, Ψ
s
)
i
, (9.204)
with Lyapunov fun ction
V (A, Φ
s
, Ψ
s
) = εA
4
+ Φ
2
s
+
ˆ
P [Ψ
s
− α(A, Φ
s
)]
2
, (9.205)
where R
2
> 0 and
ˆ
P > 0. Fu rthermore, the performance functional
minimized by the control law (9.204) has the form
J(A
0
, Φ
s
0
, Ψ
s
0
, u) =
Z
∞
0
[L
1
(A(t), Φ
s
(t), Ψ
s
(t))
+L
2
(A(t), Φ
s
(t), Ψ
s
(t))u(t) + R
2
u
2
(t)]dt, (9.206)
where
L
1
(A, Φ
s
, Ψ
s
)
△
= R
2
φ
2
(A, Φ
s
, Ψ
s
) − V
′
sub
(A, Φ
s
)[f(A, Φ
s
) + G(A, Φ
s
)Ψ
s
]
+2[Ψ
s
− α(A, Φ
s
)]
ˆ
P α
′
(A, Φ
s
)[f(A, Φ
s
) + G(A, Φ
s
)Ψ
s
].
(9.207)
Now L
2
(A, Φ
s
, Ψ
s
) must be chosen to satisfy condition (9.62) or, equivalently,
(Ψ
s
− α(A, Φ
s
))
− 2Φ
s
− 2
ˆ
P
h
α
′
(A, Φ
s
)(f(A, Φ
s
) + G(A, Φ
s
)Ψ
s
)
+R
−1
2
[
ˆ
P (Ψ
s
− α(A, Φ
s
)) +
1
2
L
2
(A, Φ
s
, Ψ
s
)]
i
< 0. (9.208)
A particular admissible choice for L
2
(A, Φ
s
, Ψ
s
) satisfying (9.208) is
given by
L
2
(A, Φ
s
, Ψ
s
) = −2R
2
{
ˆ
P
−1
Φ
s
+ α
′
(A, Φ
s
)[f(A, Φ
s
) + G(A, Φ
s
)Ψ
s
]
−c
3
A
2
[Ψ
s
−α(A, Φ
s
)]}, (9.209)
where c
3
≥ 0. For this choice of L
2
(A, Φ
s
, Ψ
s
) the feedback control (9.204)
becomes
−φ(A, Φ
s
, Ψ
s
) = R
−1
2
ˆ
P [Ψ
s
− α(A, Φ
s
)] −
ˆ
P
−1
Φ
s
− α
′
(A, Φ
s
)[f(A, Φ
s
)
+G(A, Φ
s
)Ψ
s
] + c
3
A
2
(Ψ
s
− α(A, Φ
s
)), (9.210)
so that (9.208) satisfies
−2R
−1
2
ˆ
P
2
(Ψ
s
− α(A, Φ
s
))
2
− c
3
ˆ
P A
2
(Ψ
s
− α(A, Φ
s
))
2
< 0,
(A, Φ
s
, Ψ
s
) 6= (0, 0, 0). (9.211)
Note that instead of using L
2
(A, Φ
s
, Ψ
s
) to simply cancel the indefinite
terms in (9.208), we have also added an extra term in which the stall cell
squared amplitude A
2
is multiplied by the tracking error Ψ
s
−α(A, Φ
s
) and a

NonlinearBook10pt November 20, 2007
OPTIMAL INTEGRATOR BACKSTEPPING CONTROL 587
nonnegative constant c
3
. This illustrates the flexibility available in choosing
L
2
(A, Φ
s
, Ψ
s
) in the control law. In the special case
ˆ
P =
1
2
, ε = 0, c
3
= 0,
and R
2
= 1/c
2
this control law specializes to the controller given in [247].
However, when ε vanishes the positive definiteness of the Lyapunov fu nction
(9.205) over the whole state space is destroyed, and hence, the optimality
claims of Theorem 9.1 cannot be made for the controller given in [247].
Whereas by varying ε, c
3
, and
ˆ
P in the control law (9.210), we can generate
a family of controllers w hich guarantee global asymptotic stability and global
optimality with respect to the performance functional (9.206).
Using the initial conditions A
0
= 0.5, Φ
s
0
= 0, Ψ
s
0
= 0, and parameter
values Ψ
C0
= 0.72, σ = 3.6, β = 0.356, with
ˆ
P = 2.5, R
2
= 1, ε = 0.0625,
and c
3
= 0.25 the inverse optimal control law (9.210) and the controller
given in [247] (with c
1
= c
2
= 1) were used to compare the closed-loop
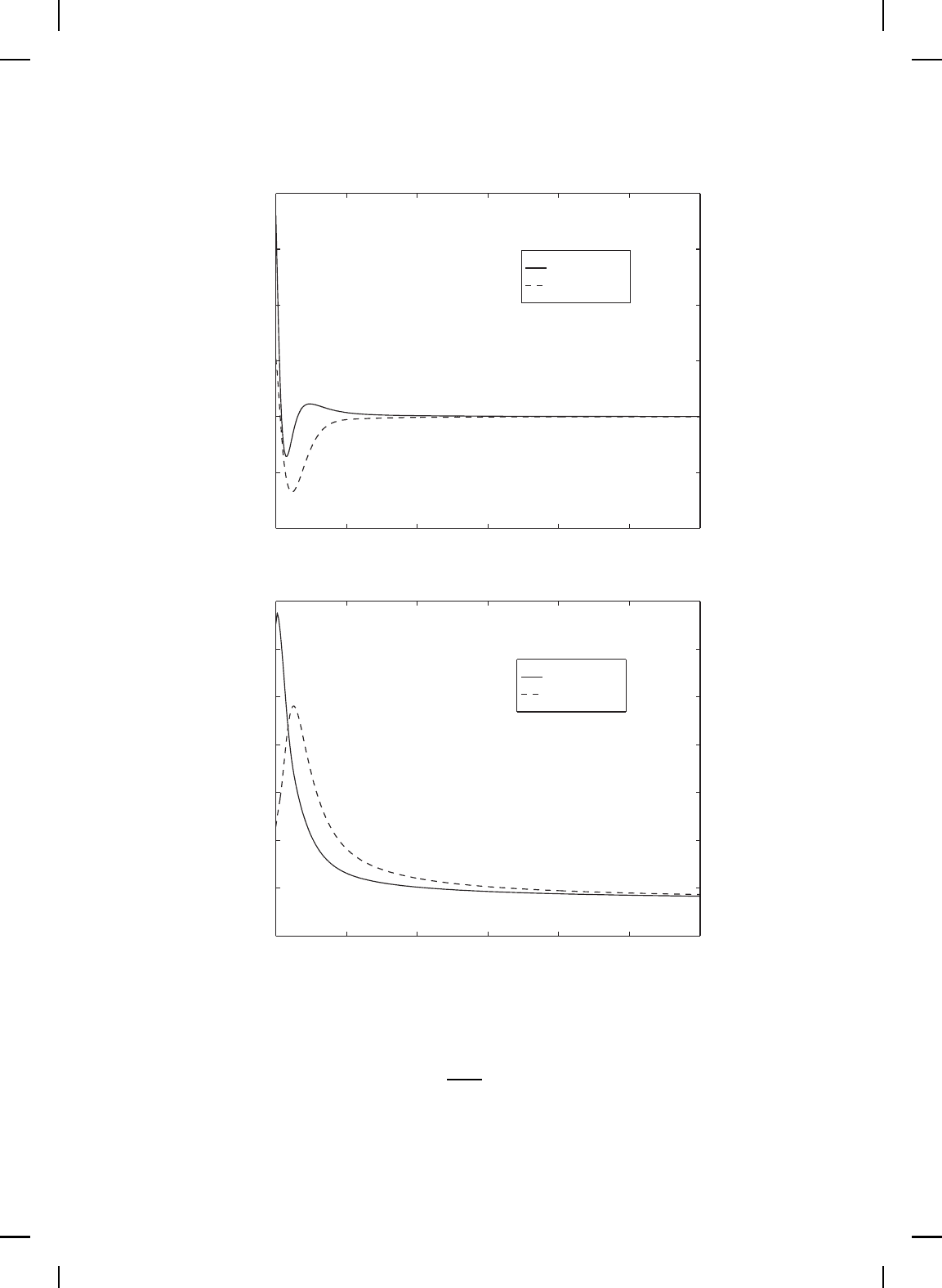
system response. The squared stall cell amplitude responses for the two
controllers are compared in Figure 9.4, the compressor fl ow and pr essure
rise responses are compared in Figures 9.5 and 9.6, and the control efforts
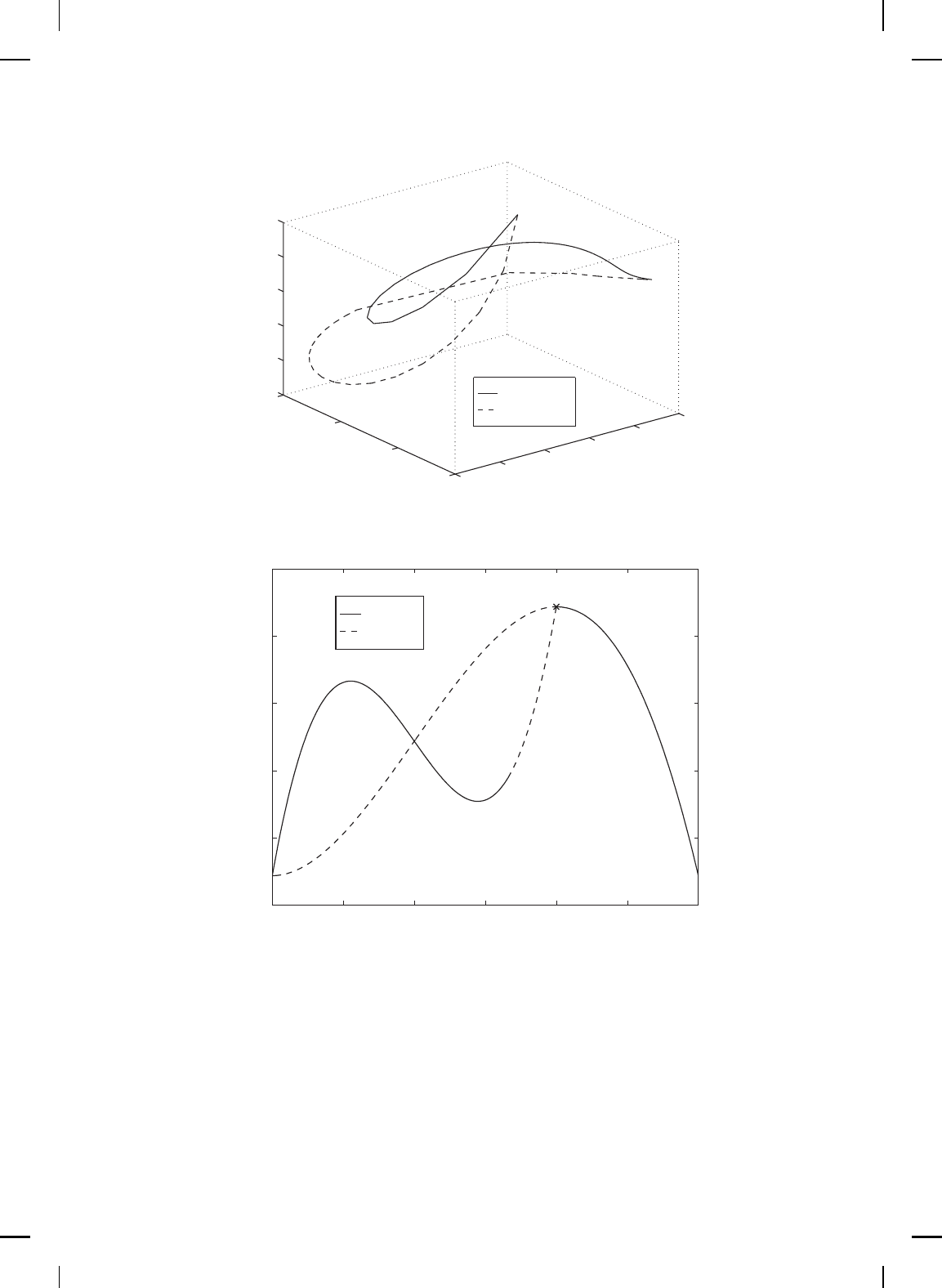
are compared in Figures 9.7 and 9.8. In Figure 9.9 a phase portrait is
given comparing the overall s y s tem state trajectories for the two controllers.
This comparison illustrates that the present framework allows the control
designer to improve both the state response and the control effort using the
state weights of the Lyapunov function,
ˆ
P and ε, and the control weight
of the performance functional, R
2
. Furthermore, the trade-off between
achievable state response and allowable control effort is characterized by the
performance functional (9.206). Finally, Figure 9.10 shows the compressor
pressure-flow performance map parameterized as a function of the throttle
opening which constitutes a coexistent set of stable and unstable equilibria.
The controlled globally s table equilibrium point (0, 1, 2.72) correspond s to
the m aximum pressur e performance for the given compressor speed.
9.7 Surge Control for Centrifugal Co mpressors
While the literature on modeling and control of compression systems
predominantly focuses on axial flow compression systems, the research
literature on centrifugal flow compression systems is rather limited in
comparison. Notable exceptions include [21,113,119,138,184,223,357] which
address mod eling and control of centrifugal compressors. In contrast to axial
flow compression systems involving the aerodynamic instabilities of rotating
stall and surge, a common feature of [21, 113, 119, 138, 184, 223, 357] is the
realization that surge (and deep surge) is the pr ed omin ant aerodynamic
instability arising in centrifugal compression systems.
To address the problem of nonlinear stabilization for centrifugal
compression systems we consider the basic centrifugal compression sys tem
NonlinearBook10pt November 20, 2007
588 CHAPTER 9
Theorem 4.1
Backstepping
0 5 10 15 20 25 30
0
0.05
0.1
0.15
0.2
0.25
0.3
Time (sec)
Squared Stall Cell Amplitude
Figure 9.4 Squared stall cell amplitude versus time.
Theorem 4.1
Backstepping
0 5 10 15 20 25 30
0.8
0.85
0.9
0.95
1
1.05
Time (sec)
Compressor Flow
Figure 9.5 Compressor flow versus time.
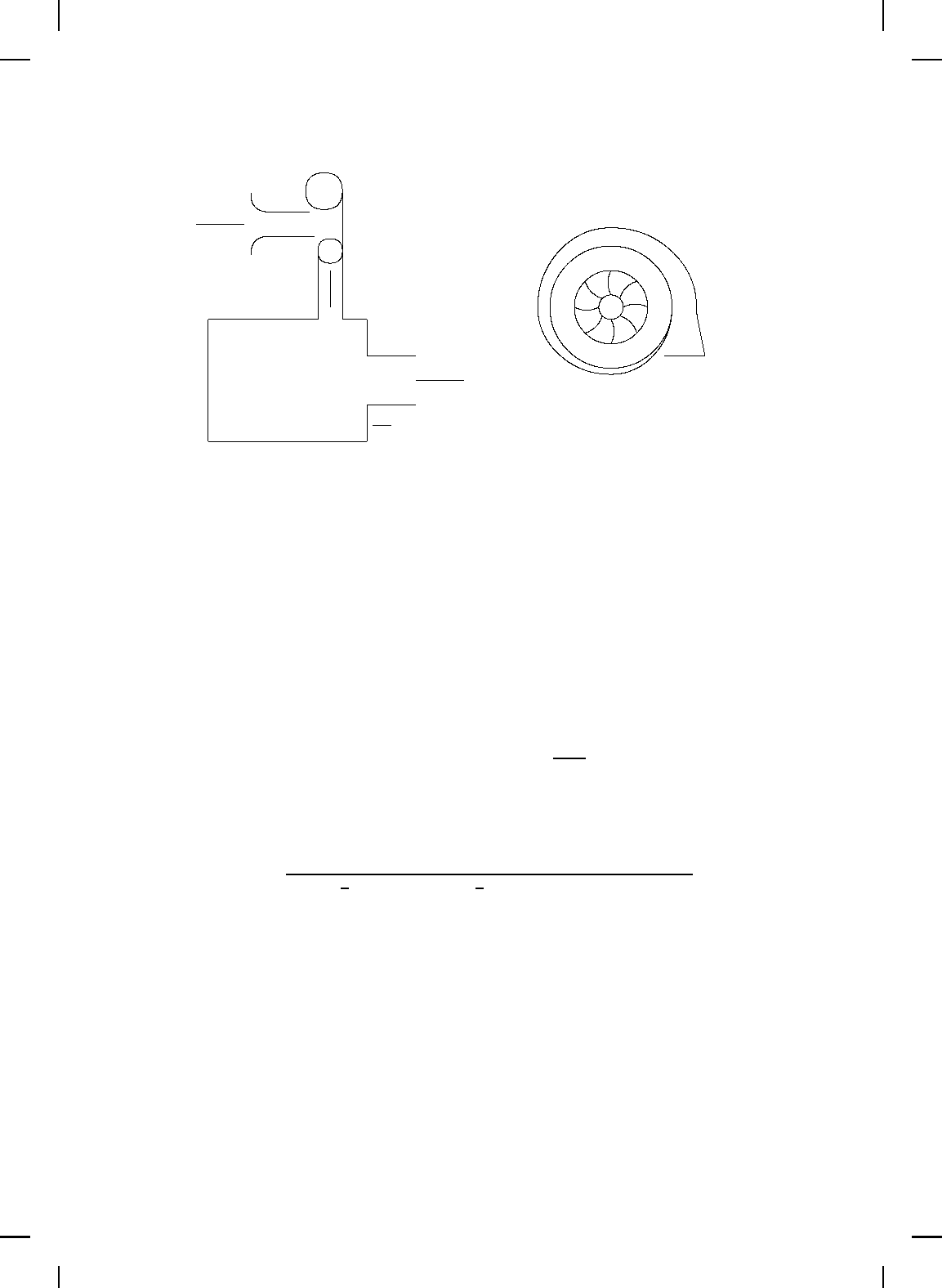
shown in Figure 9.11, consisting of a short inlet duct, a compressor, an
outlet duct, a plenum, an exit duct, and a control throttle. We assume
NonlinearBook10pt November 20, 2007
OPTIMAL INTEGRATOR BACKSTEPPING CONTROL 589
Theorem 4.1
Backstepping
0 5 10 15 20 25 30
1.8
1.9
2
2.1
2.2
2.3
2.4
2.5
2.6
2.7
2.8
Time (sec)
Pressure Rise in Compressor
Figure 9.6 Pressure rise versus time.
that the plenum d imen sions are large as compared to the compressor-duct
dimensions so that the fluid velocity and acceleration in the plenum are
negligible. In this case, the pressure in the plenum is spatially uniform.
Furth ermore, we assume that the flow is controlled by a throttle at the
plenum exit. In addition, we assume a low-speed compression system with
oscillation frequencies much lower than the acoustic resonance frequencies
so that the flow can be considered incompressible. However, we do assume
that the gas in the plenum is compressible and acts as a gas spring. Finally,
we assume isentropic process dynamics in the plenum an d negligible gas
angular momentum in the compressor passages as compared to the impeller
angular momentum.
To address the problem of nonlinear stabilization for centrifugal
compression systems we use th e three-state lumped parameter mod el
for surge in centrifugal flow compression systems developed in [119, 138,
278]. Specifically, pressure and mass flow compression system dynamics
are developed u s ing principles of conservation of mass and momentum.
Furth ermore, in order to account for the influence of speed transients on
the compression surge dynamics, turbocharger spool dynamics are also
considered.
Using continuity it follows that mass conservation in the plenum is
NonlinearBook10pt November 20, 2007
590 CHAPTER 9
Theorem 4.1
Backstepping
0 5 10 15 20 25 30
0.8
0.9
1
1.1
1.2
1.3
1.4
Time (sec)
Throttle Flow
Figure 9.7 Throttle flow versus time.
Theorem 4.1
Backstepping
0 5 10 15 20 25 30
1.4
1.5
1.6
1.7
1.8
1.9
2
2.1
Time (sec)
Throttle Opening
Figure 9.8 Throttle opening versus time.
given by
˙
Ψ(t) = a(Φ(t) − γ
throt
p
Ψ(t)), Ψ(0) = Ψ
0
, t ≥ 0, (9.212)
NonlinearBook10pt November 20, 2007
OPTIMAL INTEGRATOR BACKSTEPPING CONTROL 591
A
2
Ψ
Theorem 4.1
Backstepping
1.8
2
2.2
2.4
2.6
2.8
0
0.1
0.2
0.3
0.8
0.85
0.9
0.95
1
1.05
Φ
Figure 9.9 Phase portrait of state trajectories from (0.5, 1, 2.72)
T
.
Stable
Unstable
-1 -0.5 0 0.5 1 1.5 2
0.5
1
1.5
2
2.5
3
Compressor Flow
(Φ)
Pressure in Compressor (Ψ)
Figure 9.10 Compression system performance map.
where Φ is the nondimensional mass flow rate at the plenum entrance, Ψ
is th e total-to-static pressure ratio, γ
throt
is a parameter proportional to
the throttle opening, and a is a nondimensional parameter r elated to the
compressor dimensions.
NonlinearBook10pt November 20, 2007
592 CHAPTER 9
C
C
C
D
D
D
D
-
A
A
AU
?
-
Compressor
Inlet Duct
Outlet Duct
Exit Duct
Throttle
Plenum
p
0
T
01
p
2
p
p
V
p
Outlet Diffuser
Vaneless Diffuser
*
Impeller
P
P
P
P
Pq
Volute
Figure 9.11 Centrifugal compressor system geometry.
Next, using a momentum balance with the assumption of incompress-
ible flow, using the fact that the change in angular momentum of the fluid is
equal to the compressor torque, assuming isentropic process dyn amics with
constant specific heat, and assuming an absence of prewhirl at the rotor
inlet, it follows that [107, 193,309]
˙
Φ(t) = b(Ψ
c
(Φ(t), Ω(t)) −Ψ(t)), Φ(0) = Φ
0
, t ≥ 0, (9.213)
where Ω is th e n ondimensional angular velocity of compressor spool, Ψ
c
(Φ,
Ω) is the compressor characteristic pressure-flow/angular velocity map given
by
Ψ
c
(Φ, Ω)
△
=
1 + η
c
(Φ, Ω)σdΩ
2
γ
sh
γ
sh
−1
− 1, (9.214)
where γ
sh
is the specific heat ratio and η
c
(Φ, Ω) is the isentropic efficiency
given by ([278])
η
c
(Φ, Ω)
△
=
σΩ
2
σΩ
2
+
1
2
(f
1
Ω − f
2
Φ)
2
+
1
2
(σΩ −f
3
Φ)
2
+ Φ
2
(f
4
+ f
5
)
. (9.215)
Here, σ is the slip factor and b, d, f
i
, i = 1, . . . , 5, are nondimensional
parameters related to the compressor dimensions, the sound velocity in
the plenum, the indu cer and rotor geometry, and the friction coefficients,
respectively.
It is important to note that the compressor characteristic map given by
(9.214) holds for the case where the flow through the compressor is positive.
In the case of deep surge involving negative mass flow, it is assumed that
the pressure rise in the compressor is proportional to the square of the mass
NonlinearBook10pt November 20, 2007
OPTIMAL INTEGRATOR BACKSTEPPING CONTROL 593
flow so that [184]
Ψ
c
(Φ, Ω) = µΦ
2
+ Ψ
c
0
(Φ, Ω), Φ < 0, (9.216)
where µ is a constant and
Ψ
c
0
(Φ, Ω)
△
= Ψ
C
(Φ, Ω)
Φ=0
= (1 + ση
c0
dΩ
2
)
γ
sh
γ
sh
−1
− 1, (9.217)
where
η
c
0
△
= η
C
(Φ, Ω)|
Φ=0
=
2σ
σ
2
+ 2σ + f
2
1
. (9.218)
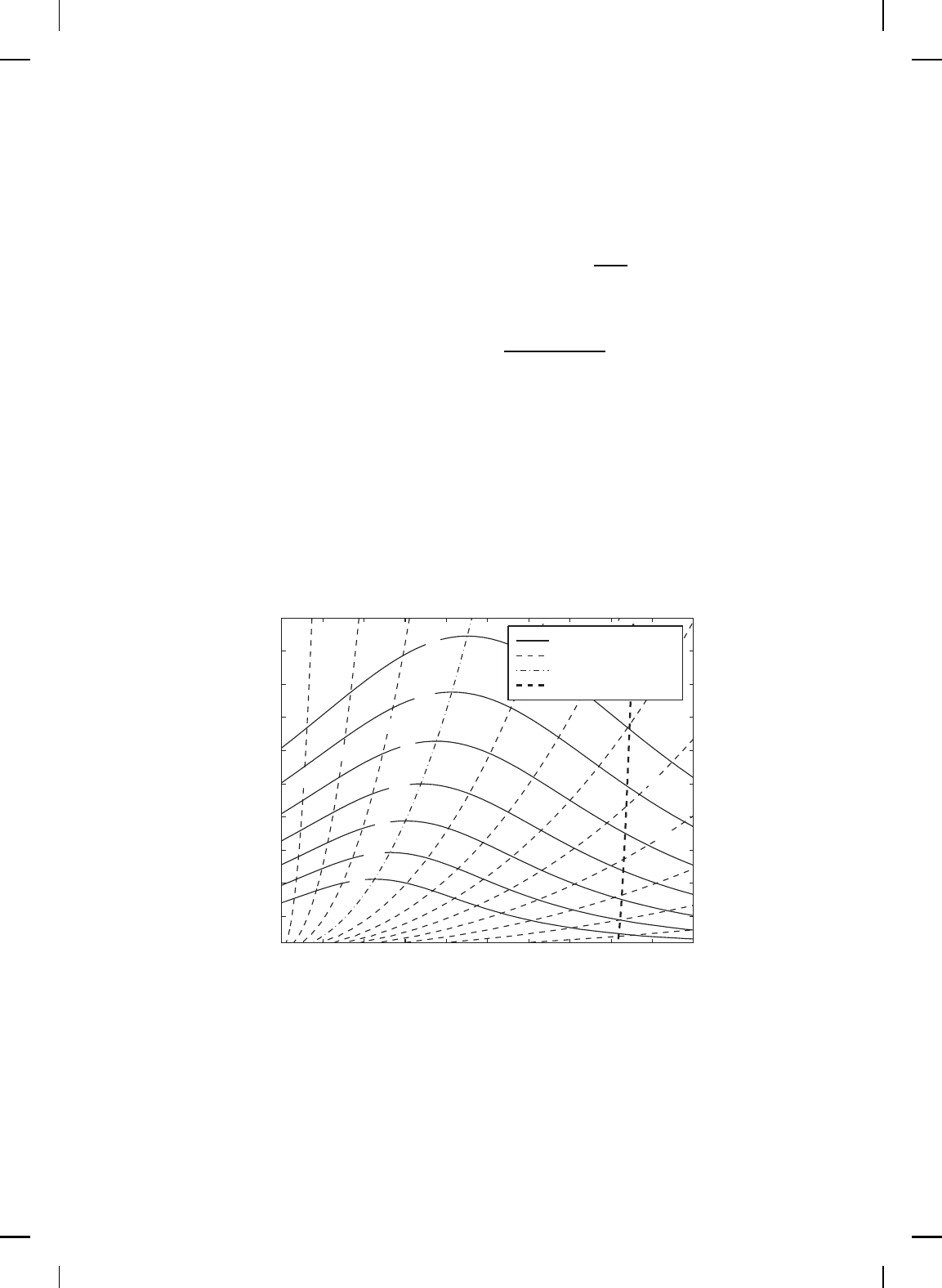
It is shown in [278] that η
c
max
is constant for all spool speeds.
This indicates th at the compressor achieves the same maximum isentropic
efficiency at each maximum p ressure point for all spool speeds. However,
since these points are critically stable, active control is needed to guarantee
stable compression system operation for peak compressor performance.
Figure 9.12 shows a typical family of compressor characteristic maps for
different spool speeds along with the corresponding constant isentropic
efficiency lines. Th e stone wall depicted in Figure 9.12 corresponds to choked
flow at a given cross-section of the compression system [138,278].
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
φ
ψ
0.5
0.6
0.7
0.8
0.9
0.9
0.8
0.7
0.6
0.55
0.
5
0.45
0.4
0.35
0.3
Constant ω lines
Constant η lines
Max ψ line
Stone wall
Figure 9.12 Compressor characteristic maps and efficiency lines for different spool speed s.
Finally, using conservation of angular momentum in the turbocharger
spool it follows that the nondimensional s pool dynamics are given by
˙
Ω(t) = c(τ(t) −σΦ(t)Ω(t)), Ω(0) = Ω
0
, t ≥ 0, (9.219)

NonlinearBook10pt November 20, 2007
594 CHAPTER 9
where τ (·) is the nondimensional driving torque and c is a nondimensional
parameter related to th e spool mass moment of inertia.
Next, we apply th e inverse optimal backstepping control framework to
control surge in centrifugal compression systems. First, we note that with
control inputs u
1
△
= γ
throt
√
Ψ and u
2
△
= τ it follows fr om (9.212), (9.213),
and (9.219), that a state space model for the centrifugal compressor is given
by
˙
Ψ(t) = a(Φ(t) − u
1
(t)), Ψ(0) = Ψ
0
, t ≥ 0, (9.220)
˙
Φ(t) = b(Ψ
c
(Φ(t), Ω(t)) −Ψ(t)), Φ(0) = Φ
0
, (9.221)
˙
Ω(t) = c(u
2
(t) −σΦ(t)Ω(t)), Ω(0) = Ω
0
. (9.222)
Note that for fixed values of the control inputs u
1
and u
2
, (9.220), (9.221)
and (9.222) give an equilibrium point (Ψ
eq
, Φ
eq
, Ω
eq
), where (Ψ
eq
, Φ
eq
, Ω
eq
)
is given by
(Ψ
eq
, Φ
eq
, Ω
eq
) =
Ψ
c
(Φ
eq
, Ω
eq
), u
1eq
,
u
2eq
σΦ
eq
. (9.223)
Defining th e shifted state variables x
1
△
= Ψ − Ψ
eq
, x
2
△
= Φ − Φ
eq
, and
x
3
△
= Ω − Ω
eq
, so that for a given equilibrium point on the compressor
characteristic map th e system equilibrium is translated to the origin, and
defining the shifted controls ˜u
1
△
= u
1
− u
1eq
and ˜u
2
△
= u
2
− u
2eq
, it follows
that the translated n onlinear system is given by
˙x
1
(t) = a(x
2
(t) − ˜u
1
(t)), x
1
(0) = x
10
, t ≥ 0, (9.224)
˙x
2
(t) = b(Ψ
Ceq
(x
2
(t), x
3
(t)) − x
1
(t)), x
2
(0) = x
20
, (9.225)
˙x
3
(t) = c(˜u
2
(t) −f(x
2
(t), x
3
(t))), x
3
(0) = x
30
, (9.226)
where
Ψ
Ceq
(x
2
, x
3
)
△
= Ψ
c
(Φ
eq
+ x
2
, Ω
eq
+ x
3
) − Ψ
c
(Φ
eq
, Ω
eq
), (9.227)
f(x
2
, x
3
)
△
= σ(Φ
eq
x
3
+ Ω
eq
x
2
) + σx
2
x
3
. (9.228)
Now, setting
ˆu = x
2
− ˜u
1
, (9.229)
˜u
2
= −k
3
x
3
+ f (x
2
, x
3
), (9.230)
where k
3
> 0, and substituting (9.229) and (9.230) into (9.224)–(9.226)
yields
˙x
1
(t) = aˆu(t), x
1
(0) = x
10
, t ≥ 0, (9.231)
˙x
2
(t) = b(Ψ
Ceq
(x
2
(t), x
3
(t)) − x
1
(t)), x
2
(0) = x
20
, (9.232)
˙x
3
(t) = −k
3
cx
3
(t), x
3
(0) = x
30
. (9.233)
Note th at (9.231)–(9.233) has the correct form for the application of