Haddad W.M. Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach
Подождите немного. Документ загружается.

NonlinearBook10pt November 20, 2007
OPTIMAL INTEGRATOR BACKSTEPPING CONTROL 575
applied to the system
˙
˜x(t) =
˜
f(˜x(t)) +
˜
G(˜x(t))u(t), ˜x(0) = ˜x
0
, t ≥ 0, (9.133)
where
˜x =
x
ˆx
,
˜
f(˜x) =
f(x) + G(x)y
ˆ
f(ˆx)
,
˜
G(˜x) =
0
ˆ
G(ˆx)
.
Specifically, conditions (8.59)–(8.62) are trivially satisfied by (9.126), (9.127),
and (9.130). Next, using (9.128) and (9.133), φ(x, ˆx) can be written as
φ(˜x) = −
1
2
R
−1
2
(˜x)(L
T
2
(˜x) +
˜
G
T
(˜x)V
′T
(˜x)) (9.134)
so that (8.65) is satisfied. Finally, using (9.130) and (9.133) it follows that
(9.131) or, equivalently,
L
1
(˜x) = φ
T
(˜x)R
2
(˜x)φ(˜x) − V
′
(˜x)
˜
f(˜x) (9.135)
satisfies (8.66).
A particular choice of L
2
(x, ˆx) satisfying condition (9.127) is given by
L
2
(x, ˆx) =
V
′
sub
(x)G(x) − 2k
T
(ˆx)
R
2
(x, ˆx). (9.136)
In this case, the feedback control φ(x, ˆx) is given by
φ(x, ˆx) = k(ˆx) −
1
2
R
−1
2
(x, ˆx)
ˆ
G
T
(ˆx)V
′T
s
(ˆx) + G
T
(x)V
′T
sub
(x)
. (9.137)
Alternatively, choosing L
2
(x, ˆx) satisfying condition (9.127) by
L
2
(x, ˆx) = V
′
sub
(x)G(x)R
2
(x, ˆx) −2k
T
(ˆx)R
2
(x, ˆx) + V
′
s
(ˆx)
ˆ
G(ˆx), (9.138)
the f eedback control φ(x, ˆx) given by (9.128) specializes to
φ(x, ˆx) = k(ˆx) −
1
2
G
T
(x)V
′T
sub
(x). (9.139)
In the case where m = 1, (9.139) specializes to the control law obtained in
Lemma 2.17 of [247].
Next, we consider a class of systems given by (9.121)–(9.123) in which
the subsystem (9.121) is assumed to be globally stabilizable at x = 0 through
y in stead of having a globally asymptotically stable equilibrium at x = 0
with y = 0. Furthermore, we assume that the zero dynamics of a nonlinear
system are asymptotically stable with respect to the signals by which they
are driven. Thus , the following result is a nonlinear analog to Theorem 9.4.
Here, we assume that the vector field
ˆ
G(L
ˆ
G
ˆ
h)
−1
is complete and involutive.
Theorem 9.6. Consider the nonlinear cascade system (9.121)–(9.123)
with performance functional (9.100) where L(x, ˆx, u) is given by
L(x, ˆx, u) = L
1
(x, ˆx) + L
2
(x, ˆx)(h
′
(ˆx)
ˆ
f(ˆx) + h
′
(ˆx)
ˆ
G(ˆx)u) + (h
′
(ˆx)
ˆ
f(ˆx)
NonlinearBook10pt November 20, 2007
576 CHAPTER 9
+h
′
(ˆx)
ˆ
G(ˆx)u)
T
R
2
(x, ˆx)(h
′
(ˆx)
ˆ
f(ˆx) + h
′
(ˆx)
ˆ
G(ˆx)u), (9.140)
where u ∈ R
m
, L
1
: R
n
×R
q
→ R, L
2
: R
n
×R
q
→ R
1×m
satisfies L
2
(0, 0) = 0,
and R
2
: R
n
×R
q
→ P
m
. Assume that there exist continuously differentiable
functions α : R
n
→ R
m
and V
sub
: R
n
→ R such that
α(0) = 0, (9.141)
V
sub
(0) = 0, (9.142)
V
sub
(x) > 0, x ∈ R
n
, x 6= 0, (9.143)
V
′
sub
(x)[f(x) + G(x)α(x)] < 0, x ∈ R
n
, x 6= 0. (9.144)
Furth ermore, let L
2
(x, ˆx) satisfy
(y − α(x))
T
G
T
(x)V
′T
sub
(x) − 2
ˆ
P
h
α
′
(x)(f(x) + G(x)y)
+R
−1
2
(x, ˆx)[
ˆ
P (y − α(x)) +
1
2
L
T
2
(x, ˆx)]
i
< 0, (x, y) ∈ R
n
× R
m
, y 6= α(x),
(9.145)
where
ˆ
P ∈ R
m×m
is an arbitrary positive-definite matrix, and assume that
(9.122) and (9.123) has constant relative degree {1, 1, . . . , 1} globally defined
uniformly in x with input-to-state stable zero dynamics. Then the zero
solution (x(t), ˆx(t)) ≡ (0, 0) of the cascade system (9.121)–(9.123) is globally
asymptotically stable with the feedback control law
u = (h
′
(ˆx)
ˆ
G(ˆx))
−1
[v − h
′
(ˆx)
ˆ
f(ˆx)], (9.146)
where
v = φ(x, ˆx) = −R
−1
2
(x, ˆx)
ˆ
P (y − α(x)) −
1
2
R
−1
2
(x, ˆx)L
T
2
(x, ˆx). (9.147)
Furth ermore,
J(x
0
, ˆx
0
, (h
′
(ˆx)
ˆ
G(ˆx))
−1
(φ(x, ˆx) −h
′
(ˆx)
ˆ
f(ˆx))) = V (x
0
, h(ˆx
0
)),
(x
0
, ˆx
0
) ∈ R
n
× R
q
, (9.148)
where
V (x, y) = V
sub
(x) + [y − α(x)]
T
ˆ
P [y − α(x)], (9.149)
and the performan ce functional (9.140), with
L
1
(x, ˆx) = φ
T
(x, ˆx)R
2
(x, ˆx)φ(x, ˆx) − V
′
sub
(x)(f(x) + G(x)y)
+2(y − α(x))
T
ˆ
P α
′
(x)(f(x) + G(x)y), (9.150)
is minimized in the sense that
J(x
0
, ˆx
0
, (h
′
(ˆx)
ˆ
G(ˆx))
−1
(φ(x, ˆx) −h
′
(ˆx)
ˆ
f(ˆx)))
= min
u(·)∈S(x
0
,ˆx
0
)
J(x
0
, ˆx
0
, u(·)), (x
0
, ˆx
0
) ∈ R
n
× R
q
.
(9.151)

NonlinearBook10pt November 20, 2007
OPTIMAL INTEGRATOR BACKSTEPPING CONTROL 577
Proof. Since the nonlinear subsystem (9.122) and (9.123) has relative
degree {1, 1, . . . , 1}, it follows from Lemma 6.2 that there exists a global
diffeomorphism T : R
q
→ R
q
such that, in the coordinates
y
z
△
= T (ˆx), (9.152)
the nonlinear differential equation (9.122) is equivalent to the normal form
˙y(t) = h
′
(ˆx(t))[
ˆ
f(ˆx(t)) +
ˆ
G(ˆx(t))u(t)], y(0) = h(ˆx
0
), t ≥ 0, (9.153)
˙z(t) = f
0
(z(t)) + r(z(t), y(t))y(t), z(0) = z
0
, (9.154)
where f
0
: R
(q−m)
→ R
(q−m)
and r : R
(q−m)
× R
m
→ R
(q−m)×m
. Next,
applying the linearizing feedback transformation (9.146) to (9.153) yields
the trans formed cascade system
˙x(t) = f(x(t)) + G(x(t))y(t), x(0) = x
0
, t ≥ 0, (9.155)
˙y(t) = v(t), y(0) = h(ˆx
0
), (9.156)
˙z(t) = f
0
(z(t)) + r(z(t), y(t))y(t), z(0) = z
0
. (9.157)
Initially ignoring the zero dynamics (9.157), it follows from Theorem
9.1, with ˆx replaced by y and u replaced by v, that the equilibrium x = 0,
y = 0 with the feedback control law v = φ(x, y), where φ(x, y) is given by
(9.147), is asymptotically stable. Now, since the zero dynamics subsystem
(9.157) is input-to-state stable and the zero solution y(t) ≡ 0 to (9.156)
can be made asymptotically stable, y(t) is bounded and lim
t→∞
y(t) = 0.
Hence, it f ollows from Proposition 4.2 that the zero solution z(t) ≡ 0 to
(9.157) is globally asymptotically stable. Furthermore, since ˆx = T
−1
(y, z),
global asymptotic stability of the zero s olution (y(t), z(t)) ≡ (0, 0) to (9.156)
and (9.157) implies global asymptotic stability of the zero solution ˆx(t) ≡ 0
to (9.122).
Next, with (9.155), (9.156), (9.140), and (9.149), the Hamiltonian has
the f orm
H(x, ˆx, u) = L
1
(x, ˆx) + L
2
(x, ˆx)(h
′
(ˆx)
ˆ
f(ˆx) + h
′
(ˆx)
ˆ
G(ˆx)u) + (h
′
(ˆx)
ˆ
f(ˆx)
+h
′
(ˆx)
ˆ
G(ˆx)u)
T
R
2
(x, ˆx)(h
′
(ˆx)
ˆ
f(ˆx) + h
′
(ˆx)
ˆ
G(ˆx)u)
+V
′
sub
(x)(f(x) + G(x)y) + 2(y − α(x))
T
ˆ
P [h
′
(ˆx)
ˆ
f(ˆx)
+h
′
(ˆx)
ˆ
G(ˆx)u − α
′
(x)(f(x) + G(x)y)]. (9.158)
Now, the feedback control law (9.146) is obtained by setting
∂H
∂u
= 0. Using
L
2
(0, 0) = 0 it follows that φ(0, 0) = 0, which pr oves (8.43). Next, with
L
1
(x, ˆx) given by (9.150) it follows that (8.46) holds. Finally, since
H(x, ˆx, u) = [v − φ(x, ˆx)]
T
R
2
(x, ˆx)[v − φ(x, ˆx)],
NonlinearBook10pt November 20, 2007
578 CHAPTER 9
and R
2
(x, ˆx) > 0, (x, ˆx) ∈ R
n
× R
q
, (8.45) holds. The result now follows as
a direct consequence of Th eorem 8.2.
A particular choice of L
2
(x, ˆx) satisfying condition (9.145) is given by
L
2
(x, ˆx) =
h
ˆ
P
−1
G
T
(x)V
′T
sub
(x) − 2α
′
(x)(f(x) + G(x)y)
i
T
R
2
(x, ˆx). (9.159)
In this case, for u(t) ∈ R, t ≥ 0, the control law given by (9.146) s pecializes
to the n onlinear backstepping controller obtained in Lemma 2.25 of [247] by
setting
ˆ
P =
1
2
I
m
and R
2
(x, ˆx) = 1/c.
Finally, we consider nonlinear cascade systems of the form
˙x(t) = f (x(t)) + G(x(t))y(t), x(0) = x
0
, t ≥ 0, (9.160)
˙y(t) = h
′
(ˆx(t))
ˆ
f(ˆx(t)) + h
′
(ˆx(t))
ˆ
G(ˆx(t))u(t), ˆx(0) = ˆx
0
, (9.161)
˙z(t) = f
0
(z(t)) + r(y(t), z(t))y(t), z(0) = z
0
, (9.162)
where the zero solution z(t) ≡ 0 to (9.162) is asymptotically stable,
[y
T
, z
T
]
△
= T (ˆx), and T (·) is given by (9.152). Th e system (9.160)–(9.162)
can be viewed as the normal form equivalent of (9.121)–(9.123), where the
input subsystem (9.122) and (9.123) is minimum phase with relative degree
{1, 1, . . . , 1}, obtained by applying the global diffeomorphism (9.152). In
this case, the stability assumption on (9.162) is implied by the minimum
phase assu mption on (9.122) and (9.123). For the cascade nonlinear system
(9.160)–(9.162), we consider the perf ormance functional
J(x
0
, h(ˆx
0
), z
0
, u) =
Z
∞
0
L(x(t), y(t), z(t), u(t))dt, (9.163)
where
L(x, y, z, u) = L
1
(x, y, z) + L
2
(x, y, z)u + u
T
R
2
(x, y, z)u. (9.164)
Furth ermore, define
V
c
(y, z)
△
=
Z
∞
0
V
′
0
(¯z(s))r(¯y(s), ¯z(s))¯y(s)ds, (9.165)
where ¯y(τ ) and ¯z(τ), τ ≥ 0, are solutions of (9.160) an d (9.161), respectively,
with initial conditions ¯y(0) = y and ¯z(0) = z, and V
0
(z) is a Lyapu nov
function f or the asymptotically stable (by assumption) subsystem (9.162).
Note that the time derivative of V
c
(y, z) along the trajectories of y and z is
given by
˙
V
c
(y, z) = −V
′
0
(z)r(y, z)y.
Theorem 9.7. Consider the nonlinear cascade system (9.160)–(9.162)
with performance functional (9.163), where L(x, y, z, u) is given by (9.164)
and where u ∈ R
m
, L
1
(x, y, z) : R
n
×R
m
×R
q−m
→ R, L
2
(x, y, z) : R
n
×R
m
×
R
q−m
→ R
1×m
satisfies L
2
(0, 0, 0) = 0, and R
2
: R
n
× R
m
× R
q−m
→ P
m
.
NonlinearBook10pt November 20, 2007
OPTIMAL INTEGRATOR BACKSTEPPING CONTROL 579
Assume that there exist continuously differentiable functions α : R
n
→ R
m
and V
sub
: R
n
→ R such that
α(0) = 0, (9.166)
V
sub
(0) = 0, (9.167)
V
sub
(x) > 0, x ∈ R
n
, x 6= 0, (9.168)
V
′
sub
(x)[f(x) + G(x)α(x)] < 0, x ∈ R
n
, x 6= 0. (9.169)
Furth ermore, let L
2
(x, y, z) satisfy
(y − α(x))
T
G
T
(x)V
′T
sub
(x) + 2
ˆ
P
h
h
′
(ˆx)
ˆ
f(ˆx) − α
′
(x)(f(x) + G(x)y)
−h
′
(ˆx)
ˆ
G(ˆx)R
−1
2
(x, y, z)((h
′
(ˆx)
ˆ
G(ˆx))
T
ˆ
P (y − α(x)) +
1
2
L
T
2
(x, y, z))
i
< 0,
(x, y, z) ∈ R
n
× R
m
× R
q−m
, y 6= α(x), (9.170)
where
ˆ
P ∈ R
m×m
is an arbitrary positive-definite matrix, assume that the
zero solution z(t) ≡ 0 to (9.162) with y = 0 is globally asymptotically stable
with Lyapunov function V
0
(z), assume there exist continuously d ifferentiable
functions γ
1
, γ
2
∈ K
∞
such that
kr(y, z)k ≤ γ
1
(kyk) + γ
2
(kyk)kzk, (9.171)
and assume there exist k, c > 0 such that kzk > c implies
∂V
0
(z)
∂z
kzk ≤ kV
0
(z). (9.172)
Then the zero s olution (x(t), y(t), z(t)) ≡ (0, 0, 0) of the cascade system
(9.160)–(9.162) is globally asymp totically stable w ith the feedback control
law u = φ(x, y, z), where
φ(x, y, z) = −R
−1
2
(x, y, z)(h
′
(ˆx)
ˆ
G(ˆx))
T
ˆ
P (y − α(x))
−
1
2
R
−1
2
(x, y, z)L
T
2
(x, y, z). (9.173)
Furth ermore,
J(x
0
, h(ˆx
0
), z
0
, φ(·, ·, ·)) = V (x
0
, h(ˆx
0
), z
0
), (x
0
, ˆx
0
, z
0
) ∈ R
n
× R
q
× R
q−m
,
(9.174)
where
V (x, y, z) = V
sub
(x) + (y − α(x))
T
ˆ
P (y − α(x)) + V
c
(y, z) + V
0
(z), (9.175)
and the performan ce functional (9.163), with
L
1
(x, y, z) = φ
T
(x, y, z)R
2
(x, y, z)φ(x, y, z) − V
′
sub
(x)(f(x) + G(x)y)
−V
′
0
(z)f
0
(z) + (y − α
′
(x))
T
[α
′
(x)(f(x) + G(x)y) − h
′
(ˆx)
ˆ
f(ˆx)],
(9.176)
NonlinearBook10pt November 20, 2007
580 CHAPTER 9
is minimized in the sense that
J(x
0
, h(ˆx
0
), z
0
, φ(x, y, z)) = min
u(·)∈S(x
0
,ˆx
0
,z
0
)
J(x
0
, h(ˆx
0
), z
0
, u(·)),
(x
0
, ˆx
0
, z
0
) ∈ R
n
× R
q
× R
q−m
. (9.177)
Proof. Since the subsystem (9.162) has an asymp totically stable
equilibrium at z(t) = 0, t ≥ 0, it follows from Theorem 3.9 that there
exists a continuously differentiable positive-definite function V
0
(z) such that
V
′
0
(z)f
0
(z) < 0, z ∈ R
q−m
, z 6= 0. (9.178)
Next, since r(y, z) and V
0
(z) satisfy (9.171) and (9.172), V
sub
(x) satisfies
(9.167) and (9.168), and, with
ˆ
P > 0, it follows that the Lyapunov function
candidate (9.175) is positive definite (see Problem 9.7). The resu lt now
follows as a direct consequence of Theorem 8.3 applied to the system
˙
˜x(t) =
˜
f(˜x(t)) +
˜
G(˜x(t))u(t), ˜x(0) = ˜x
0
, t ≥ 0, (9.179)
where
˜x =
x
y
z
,
˜
f(˜x) =
f(x) + G(x)y
h
′
(ˆx)
ˆ
f(ˆx)
f
0
(z) + r(y, z)y
,
˜
G(˜x) =
0
h
′
(ˆx)
ˆ
G(ˆx)
0
.
Specifically, conditions (8.59)–(8.62) are satisfied by L
2
(0, 0, 0) = 0, (9.166)–
(9.170) and (9.175). Next, using (9.173) and (9.179), φ(x, y, z) can be
written as
φ(˜x) = −
1
2
R
−1
2
(˜x)[L
T
2
(˜x) +
˜
G
T
(˜x)V
′T
(˜x)] (9.180)
so that (8.65) is satisfied. Finally, using (9.175) and (9.179) it follows that
(9.176) or, equivalently,
L
1
(˜x) = φ
T
(˜x)R
2
(˜x)φ(˜x) − V
′
(˜x)
˜
f(˜x) (9.181)
satisfies (8.66).
Assumption (9.171) requires that r(y, z) of (9.162) has, at m ost, a
linear growth in z. While this unavoidably narrows the class of admissible
nonlinear systems which can be considered, it is n ot restrictive when the
input subsystem (9.161) and (9.162) is linear so that the zero dynamics
subsystem has the form (9.115). In this case, r(y, z) = B
0
, where B
0
is a constant matrix, and hence, (9.171) is automatically satisfied. More
generally, assumption (9.172) is satisfied by Lyapunov functions involving
positive definite, radially unbou nded polynomial functions of z (see Problem
9.8). Finally, a choice of L
2
(x, y, z) satisfying condition (9.170) is given by
L
2
(x, y, z) = 2[h
′
(ˆx)
ˆ
f(ˆx) +
1
2
ˆ
P
−1
G
T
(x)V
′T
sub
(x)
−α
′
(x)(f(x) + G(x)y)]
T
(h
′
(ˆx)
ˆ
G(ˆx))
−T
R
2
(x, y, z). (9.182)
NonlinearBook10pt November 20, 2007
OPTIMAL INTEGRATOR BACKSTEPPING CONTROL 581
9.6 Rotating Stall and Surge Control for Axial
Compression Systems
The desire to develop an integrated control s ys tem design methodology
for ad vanced propulsion sy s tems has led to significant activity in mod-
eling and control of flow compression systems in recent years (see, for
example, [2, 19, 35, 103, 140,141, 143, 248, 249, 277, 318, 319, 345, 451] and the
numerous r eferences th erein). Two predominant aerodynamic instabilities
in compression systems are rotating stall and sur ge. Rotating stall
is an inherently three-dimensional
1
local comp ression system oscillation
which is characterized by regions of flow that rotate at a fraction of the
compressor rotor speed while su rge is a one-dimensional axisymmetric global
compression system oscillation, which involves axial flow oscillations and in
some cases even axial flow reversal, which can damage engine components
and cause flameout to occur.
Rotating stall and surge arise due to perturbations in stable system
operating conditions involving steady, axisymmetric flow and can severely
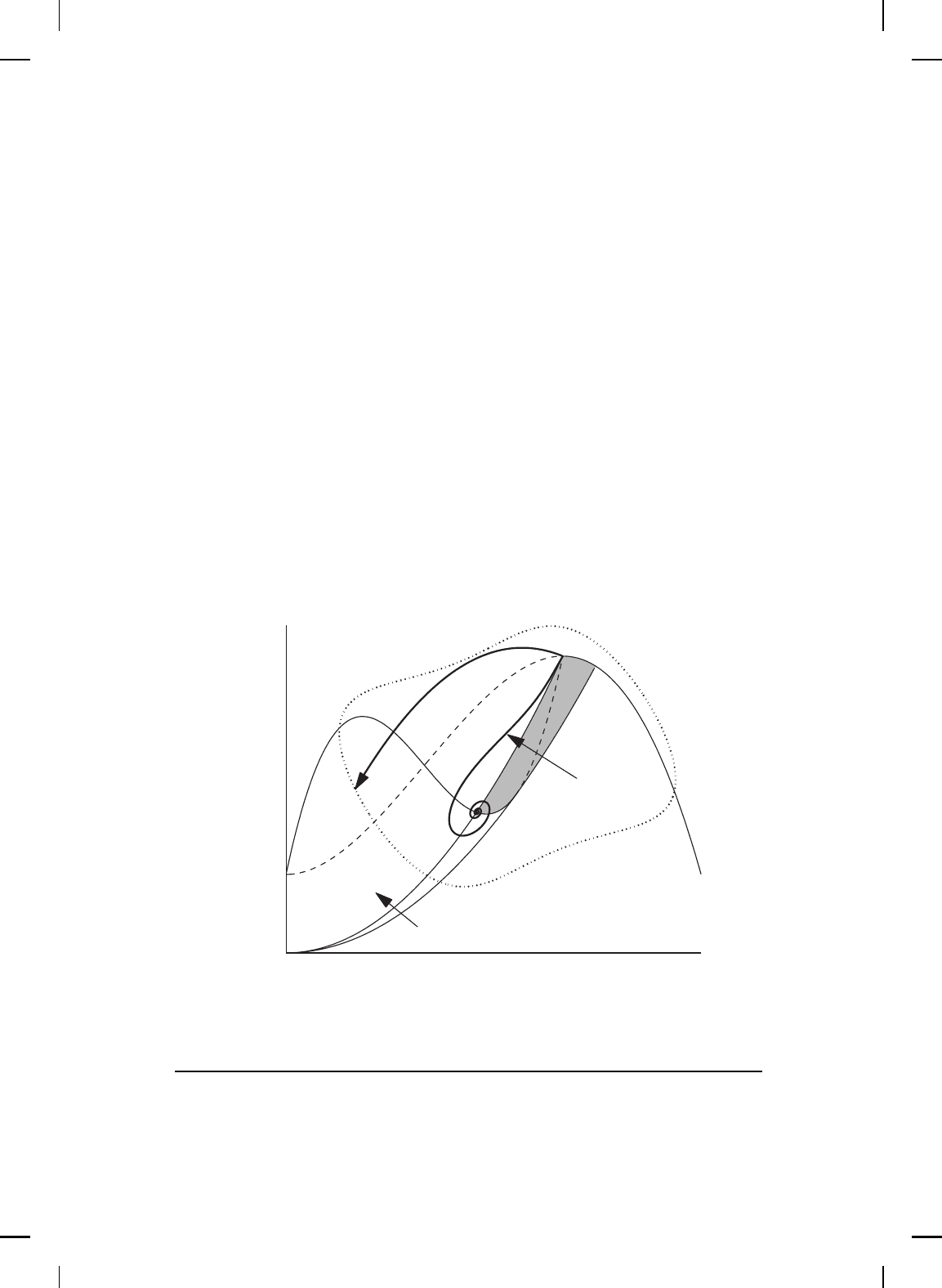
limit compressor performance. The transition f rom stable compressor
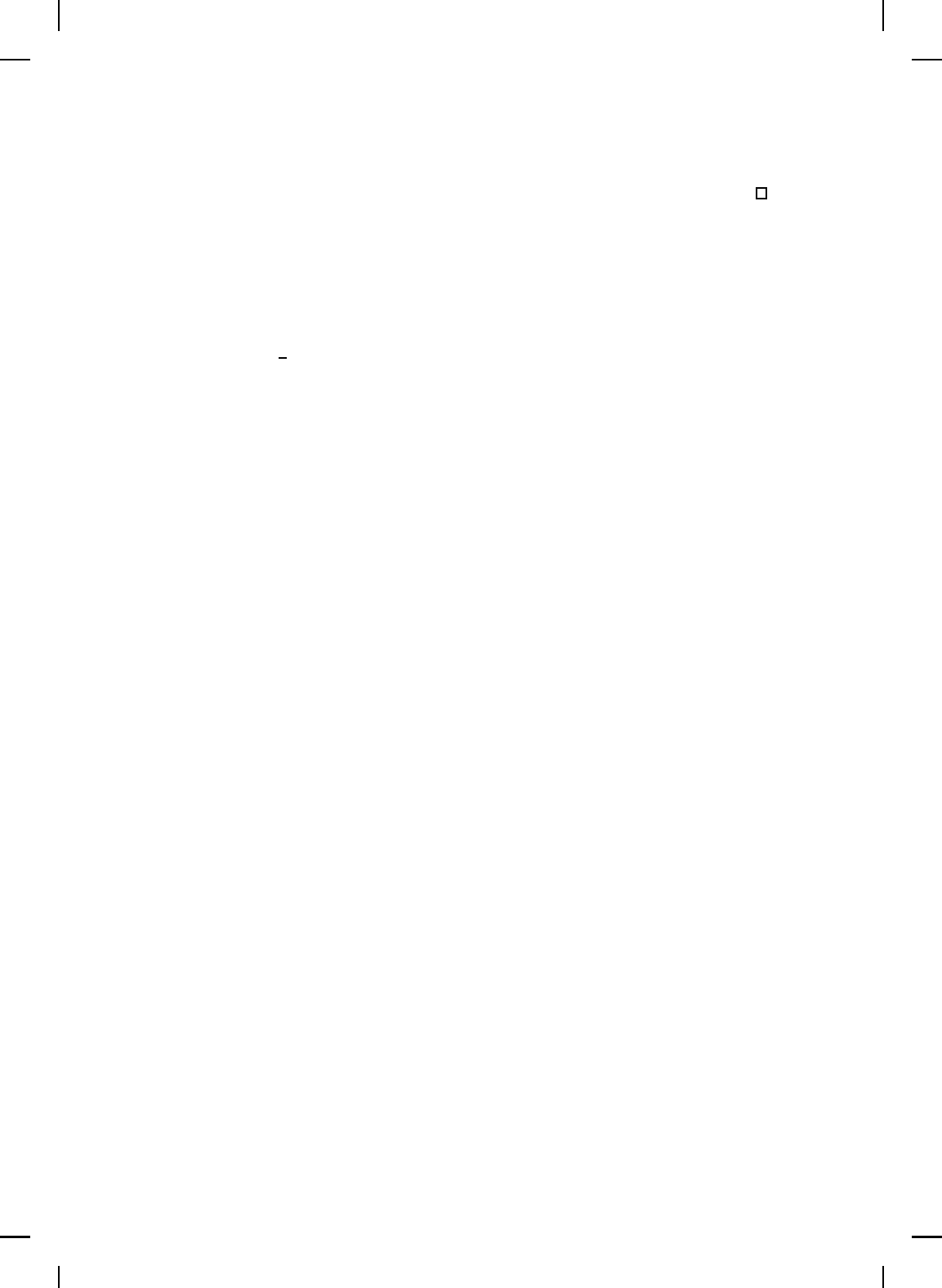
operating conditions to rotating stall and s urge is shown in Figure 9.2
representing a schematic of a compressor characteristic map where the
Flow
Pressure
Closing throttle
Rotating
Stall
Surge
Figure 9.2 Schematic of compressor characteristic map for a typical compression system
(−−−−stable equilibria, −−− unstable equilibria).
1
When analyzing high hub-to-tip ratio compressors , rotating stall can b e approximated as a
two-dimensional compression system oscillation.
NonlinearBook10pt November 20, 2007
582 CHAPTER 9
abscissa corresponds to the circumferentially averaged mass flow through
the compressor and the ordinate corresponds to the normalized total-
to-static pressure rise in the compressor. For maximum compressor
performance, operating conditions require that the pressure rise in the
compressor correspond to the maximum pressure operating point on the
stable axisymmetric branch for a given throttle opening. Here, we
distinguish between compressor performance (pr essure rise) and compressor
efficiency (specific power consumption) where, depending on how the
compressor is designed, the most efficient operating point may be to the
right of the peak of the compressor characteristic map. In practice, however,
compression system uncertainties and compression system d isturbances can
perturb the operating point into an unstable r egion d riving the system to
a stalled stable equilibrium, a stable limit cycle (surge), or both. In the
case of rotating stall, an attempt to recover to a high pressure operating
point by increasing the flow through the throttle traps the s ystem within a
flow range corresponding to two stable operating conditions involving steady
axisymmetric flow and rotating stall resulting in severe hysteresis.
To avoid rotating stall and surge, trad itionally system designers allow
for a safety margin (rotating stall or surge margin) in compression system
operation. However, to account for compression system uncertainties such
as system modeling errors, in-service changes due to aging, etc., and
compression system disturbances such as compressor speed fluctuations,
combustion noise, etc., operating at or below the rotating stall/surge margin
significantly reduces the efficiency of the compression system. In contrast,
active control can enhance stable compression system operation to achieve
peak compressor performance. However, compression system uncertainty
and compression system disturbances are often significant and the need for
robust disturbance rejection control is severe.
In order to develop control system design methodologies for compres-
sion systems, reliable models capturing th e intricate physical phenomena
of rotating stall and surge are necessary. A fundamental development in
compression system modeling for low speed axial compressors is the Moore-
Greitzer m odel given in [319]. Specifically, utilizing a one-mode expansion of
the disturbance velocity potential in the compression system and assuming
a nonlinear (cubic) characteristic for the compr essor performance map, the
authors in [319] develop a low-order, three-state nonlinear model involving
the mean flow in the compressor, the pressure rise, and the amp litude
of rotating stall. Starting from infi nitesimal perturbations in the flow
field the model captures the development of rotating stall and surge.
In particular, the model pr ed icts the experimentally verified subcritical
pitchfork bifurcation at the onset of rotating stall [311]. Extensions to the
Moore-Greitzer model that include blade row time lags and viscous transport
NonlinearBook10pt November 20, 2007
OPTIMAL INTEGRATOR BACKSTEPPING CONTROL 583
terms have been reported in [187] and [1,2, 451], respectively.
In this section, we apply the inverse optimal backstepping control
framework to the control of rotating stall and surge in j et engine compression
systems. To capture poststall transients in axial flow compression systems
we use the one-mode Galerkin app roximation model for the nonlinear partial
differential equation characterizing the disturbance velocity potential at
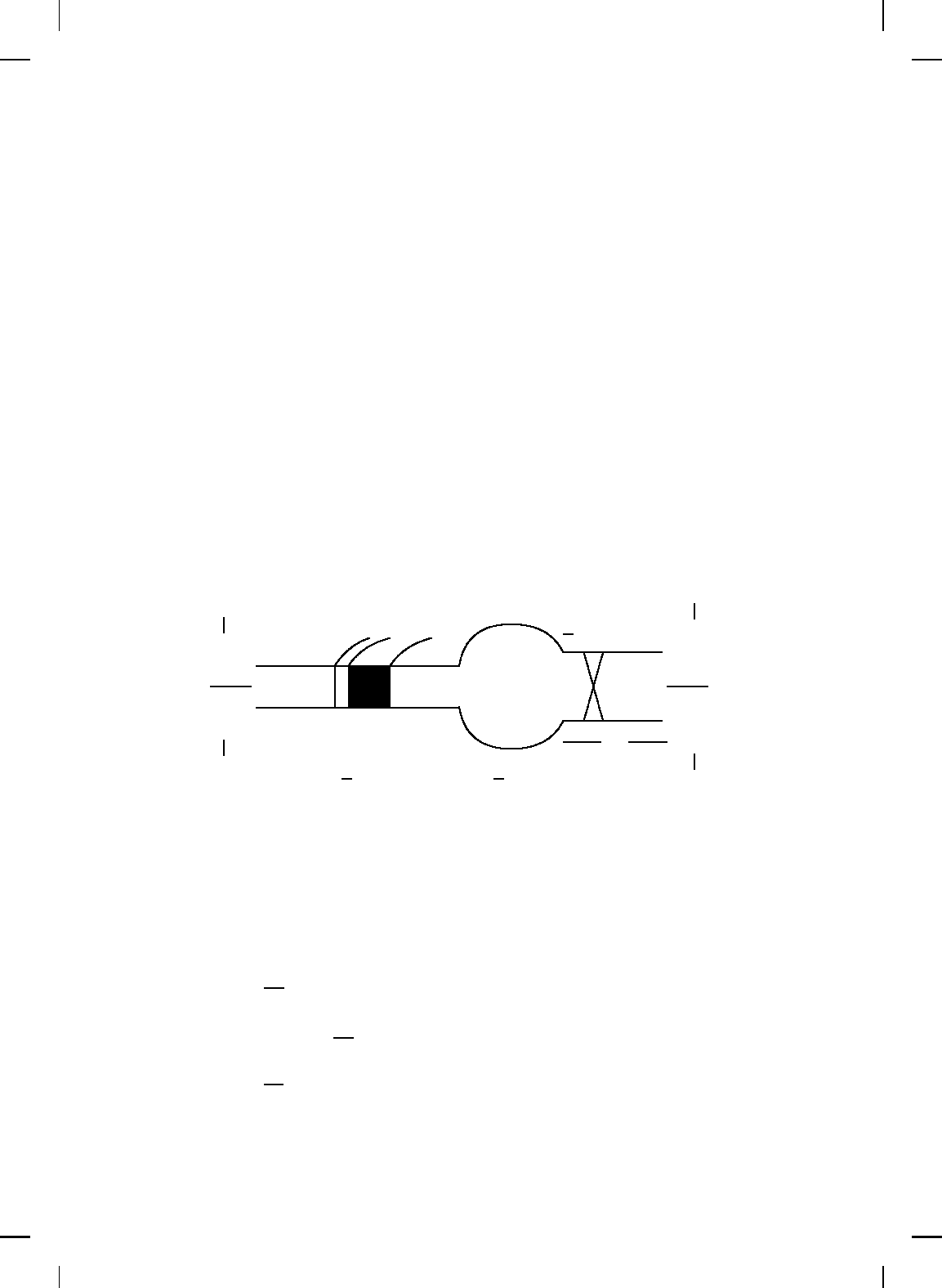
the compressor inlet proposed by Moore and Greitzer [319]. Specifically,
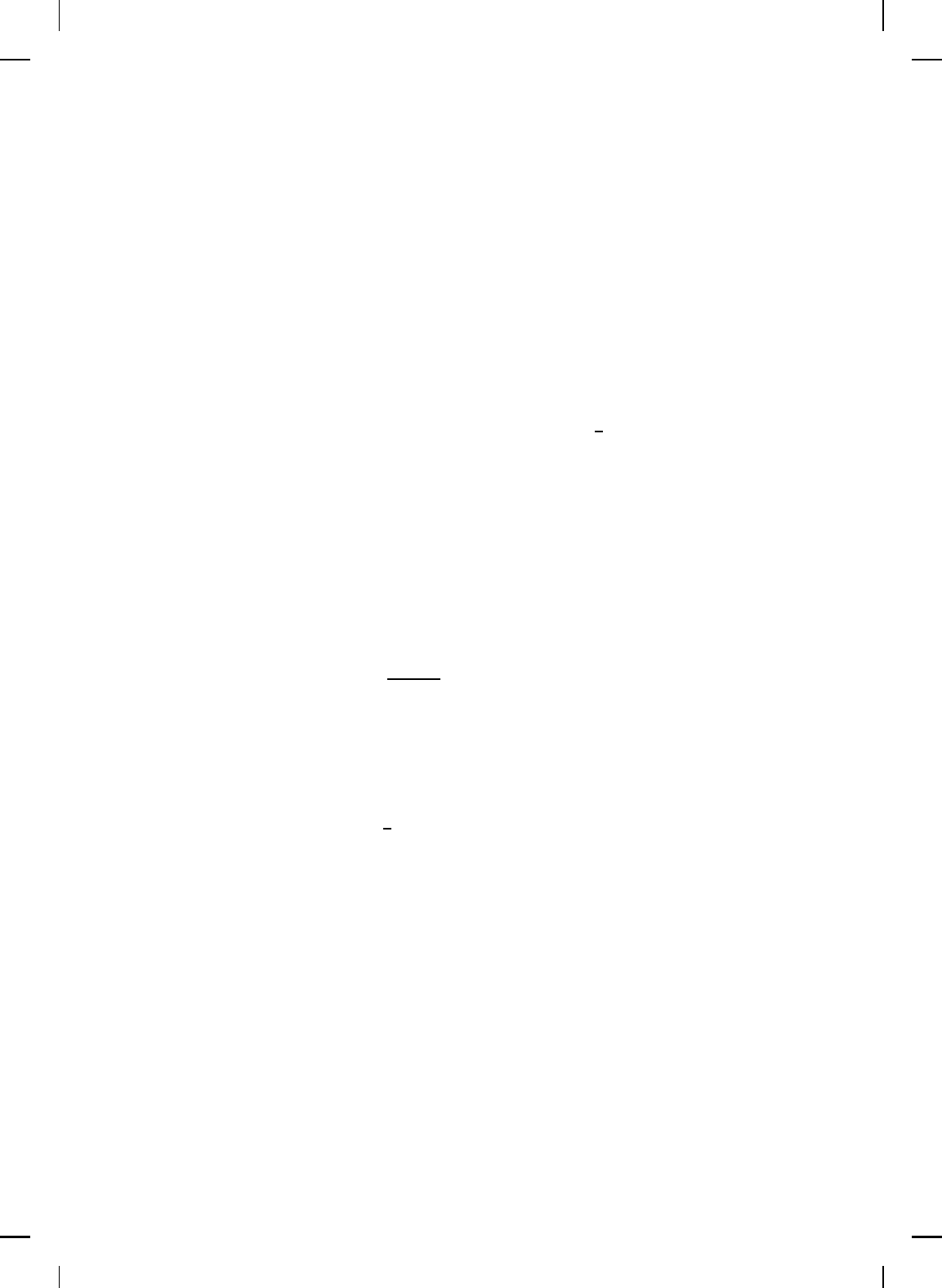
we consider the basic compression system sh own in Figure 9.3 consisting
of an inlet duct, a compressor, an outlet duct, a plenum, and a control
throttle. We assume that the plenum dimensions are large as compared to
the compressor-duct dimensions so that the flu id velocity and acceleration
in the plenum are negligible. In this case, the pressure in the plenum is
spatially uniform. Furthermore, we assume that the flow is controlled by
a thr ottle at th e plenum exit. Finally, we assume a low-speed compression
system with oscillation frequencies much lower than the acoustic resonance
frequencies so that the flow can be considered incompressible. However, we
do assume that the gas in the plenum is compressible, and therefore acts as
a gas spring.
&
%
'
$
- -
p
T
p
T
A
C
p
S
, V
P
-
l
T
Compressor
Plenum
Throttle
A
A
AU
Figure 9.3 Compressor system geometry.
Invoking a momentum balance across the compression system, con-
servation of mass in the plenum, and using a Galerkin projection based
on a one-mode circumferential spatial harmonic approximation for the non-
axisymmetric flow disturbances yields [319]
˙
A(t) =
σ
3π
Z
2π
0
Ψ
C
(Φ(t) + A(t) sin θ) sin θ dθ, A(0) = A
0
, t ≥ 0, (9.183)
˙
Φ(t) = −Ψ (t) +
1
2π
Z
2π
0
Ψ
C
(Φ(t) + A(t) sin θ) dθ, Φ(0) = Φ
0
, (9.184)
˙
Ψ(t) =
1
β
2
(Φ(t) −Φ
T
(t)), Ψ(0) = Ψ
0
, (9.185)
NonlinearBook10pt November 20, 2007
584 CHAPTER 9
where Φ is the circumferentially averaged axial mass flow in the compressor,
Ψ is the total-to-static pressure rise, A is the normalized stall cell amplitude
of angular variation capturing a measure of nonuniformity in the flow, Φ
T
is
the mass flow through the throttle, σ, β are positive constant parameters,
and Ψ
C
(·) is a given compressor pressure-flow map. The compliance
co efficient β is a function of the compressor rotor speed and plenum size.
For large values of β a surge limit cycle can occur, while rotating stall can
occur for any value of β.
Now, assuming that the compressor pressure-flow map Ψ
C
(·) is
analytic, the integral terms in (9.183)–(9.185) can be expressed in terms
of an infinite Taylor series expansion about the circumferentially averaged
flow to give
˙
A(t) =
2σ
3
∞
X
k=1
1
k!(k − 1)!
d
2k− 1
Ψ
C
(ξ)
dξ
2k− 1
ξ=Φ(t)
A(t)
2
2k− 1
,
A(0) = A
0
, t ≥ 0, (9.186)
˙
Φ(t) = −Ψ(t) +
∞
X
k=0
1
(k!)
2
d
2k
Ψ
C
(ξ)
dξ
2k
ξ=Φ(t)
A(t)
2
2k
, Φ (0) = Φ
0
,
(9.187)
˙
Ψ(t) =
1
β
2
(Φ(t) −Φ
T
(t)), Ψ(0) = Ψ
0
. (9.188)
The specific compressor pressure-flow performance map Ψ
C
which was
considered in [319] is
Ψ
C
(Φ) = Ψ
C0
+ 1 +
3
2
Φ −
1
2
Φ
3
, (9.189)
where Ψ
C0
is a constant parameter. In this case, (9.186)–(9.188) become
˙
A(t) =
σ
2
A(t)(1 −Φ
2
(t) −
1
4
A
2
(t)), A(0) = A
0
, t ≥ 0, (9.190)
˙
Φ(t) = −Ψ (t) + Ψ
C
(Φ(t)) −
3
4
Φ(t)A
2
(t), Φ(0) = Φ
0
, (9.191)
˙
Ψ(t) =
1
β
2
(Φ(t) − Φ
T
(t)), Ψ(0) = Ψ
0
. (9.192)
Next, define the control variable
u
△
=
1
β
2
(Φ
T
− Φ) (9.193)
so that for fi xed values of flow through the throttle, Φ
T
(t) ≡ Φ
Teq
, (9.190)–
(9.192) have an equilibrium point given by
(A
eq
, Φ
eq
, Ψ
eq
) = (0, Φ
Teq
, Ψ
C
(Φ
eq
)). (9.194)
Defining the shifted state variables x
1
△
= A, x
2
△
= Φ − Φ
eq
, and x
3
△
= Ψ −
Ψ
eq
, so that for a given equilibrium point on the axisymmetric branch of
the compressor characteristic pressure-flow map the sys tem equilibrium is