Haddad W.M. Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach
Подождите немного. Документ загружается.

NonlinearBook10pt November 20, 2007
OPTIMAL NONLINEAR FEEDBACK CONTROL 545
where ˆx
△
= [x
1
, x
2
]
T
,
Q
△
= R
2
2σp
1
+ R
2
(
p
1
p
2
σ + r)
2
−(p
1
σ + p
2
r)
−(p
1
σ + p
2
r) 2p
2
, (8.161)
and
y
△
=
R
2
(
p
1
p
2
σ + r) −p
2
T
. (8.162)
Since 2p
2
bx
2
3
is nonnegative for all θ ∈ (0, 1) it follows that (8.160) is
equivalent to (1 −θ
2
)Q ≥ yy
T
, wh ich implies that, if Q is invertible, (8.119)
is satisfied for all θ ∈ (0, 1) such that 1−θ
2
≥ y
T
Q
−1
y. Hence, the maximum
possible θ such that (8.119) holds is given by
θ =
p
1 − y
T
Q
−1
y. (8.163)
Now, it follows from Theorem 8.6 that for all p
1
, p
2
, R
2
> 0, such that
det Q 6= 0, with φ(x) given above the nonlinear system (8.80)–(8.82) has
disk margins of (
1
1+θ
,
1
1−θ
), where θ is given by (8.163). Furthermore, for
given p
1
, p
2
, and R
2
> 0 these disk margins are the maximum possible disk
margins that are guaranteed by Theorem 8.6. Next, we vary p
1
, p
2
, and
R
2
such that θ given by (8.163) is maximized. It can be shown that the
maximum is achieved at
p
1
p
2
=
r
σ
and
p
2
R
2
= 0 so that
θ
max
=
1
√
r + 1
. (8.164)
In this case, the control law φ(x) is given by φ(x) = −2rx
1
.
Next, using the control Lyapu nov function V (x) = p
1
x
2
1
+ p
2
x
2
2
+ p
2
x
2
3
,
where p
1
, p
2
> 0 are such that
p
1
p
2
=
r
σ
, we design a meaningful inverse
optimal controller us ing the feedback controller given by (8.155). Using
the initial conditions (x
10
, x
20
, x
30
) = (−20, −20, 30), the data parameters
σ = 10, r = 15, b = 8/3, and design parameters p
1
= 1.5 and p
2
= 1
the inverse optimal controller φ(x) = −2rx
1
and the meaningful inverse
optimal controller given by (8.155) were used to compare closed-loop system
performance. First, we note that the downside disk and sector margins of
the inverse optimal controller are 0.8 while the meaningful inverse optimal
controller guarantees the standard 0.5 downside sector margin with no disk
margin guarantees. Hence, both controllers have guaranteed robustness
sector margins to actuator saturation nonlinearities with, as expected, the
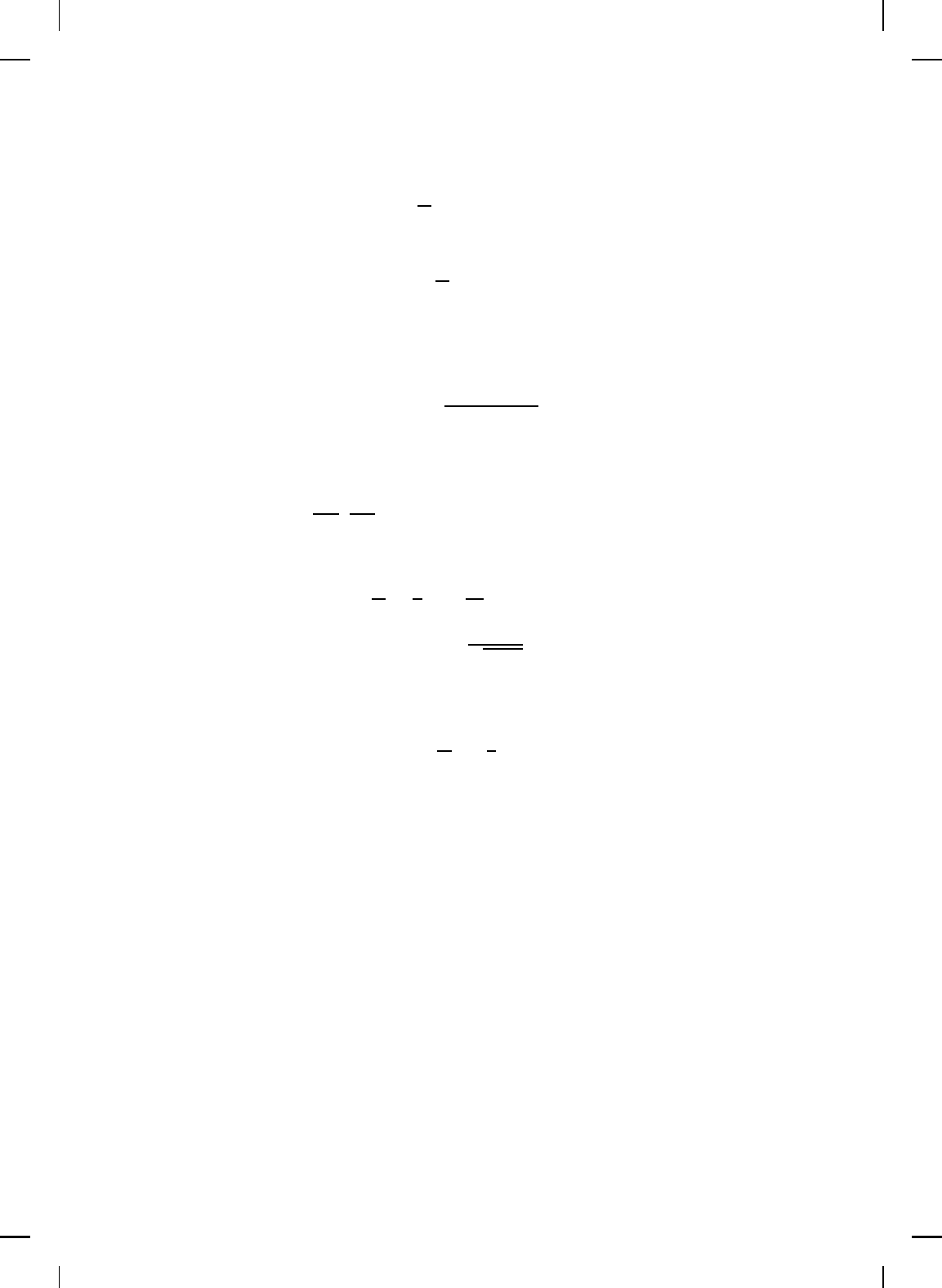
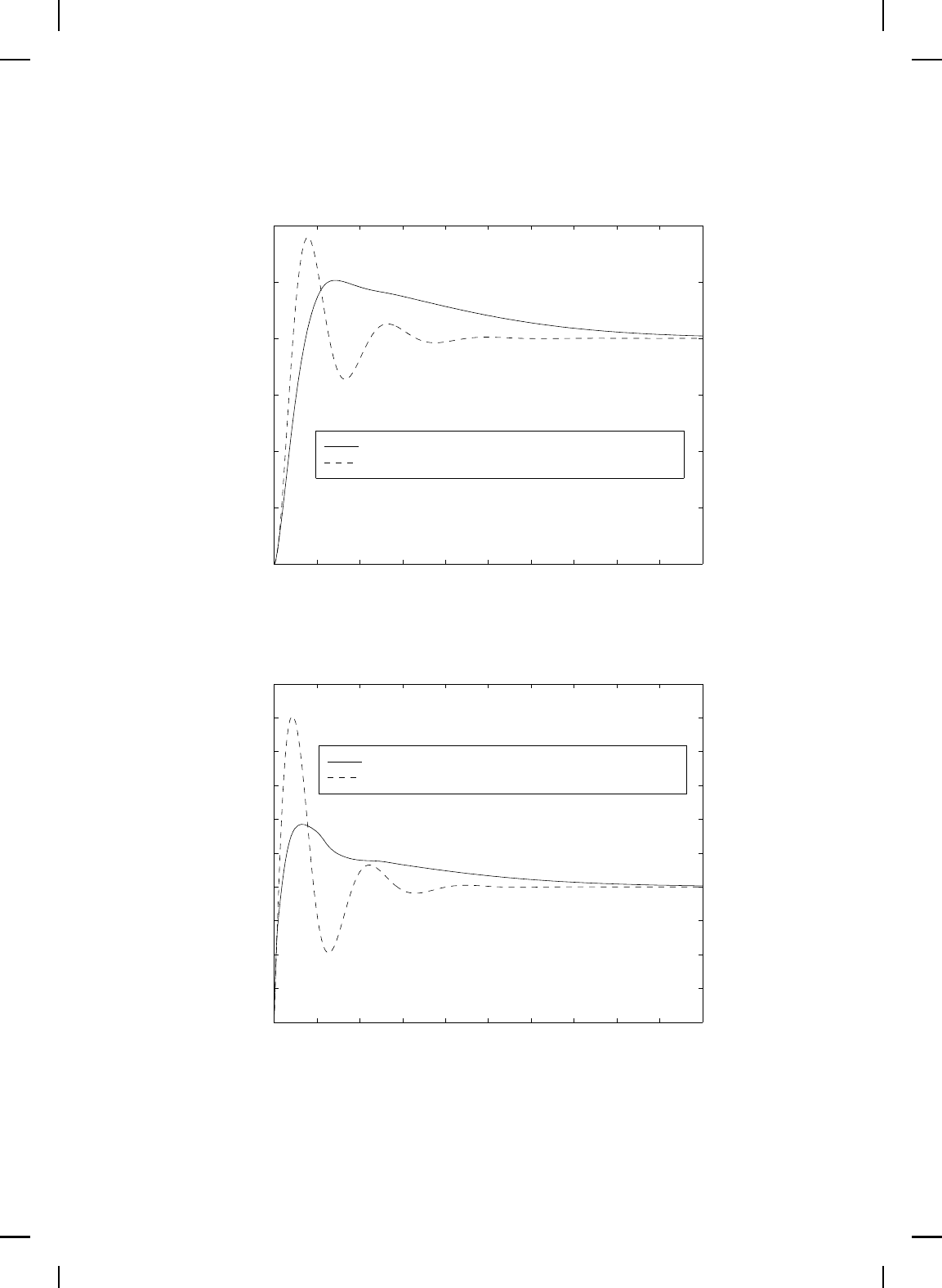
meaningful inverse optimal controller having a slightly larger guarantee.
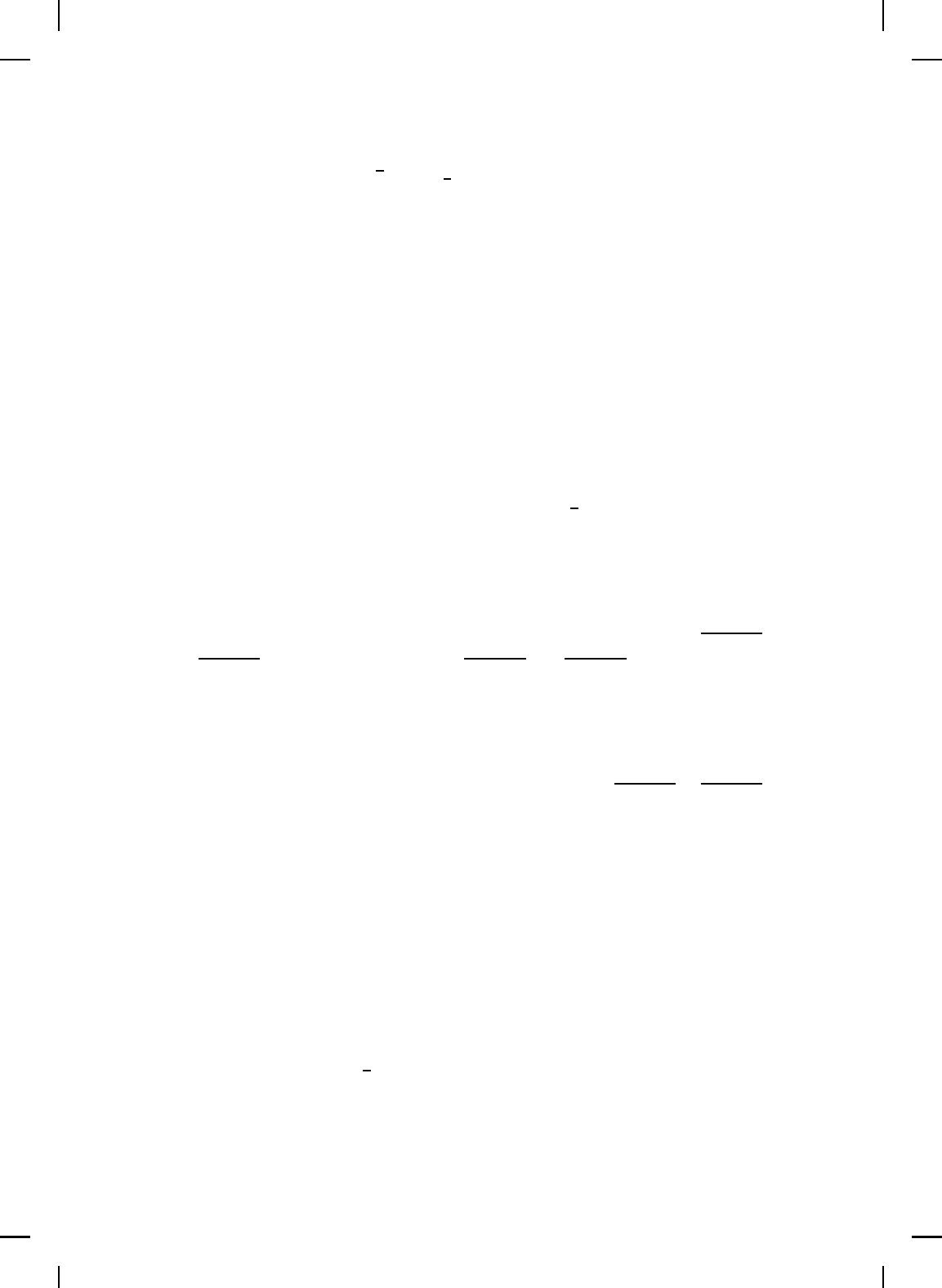
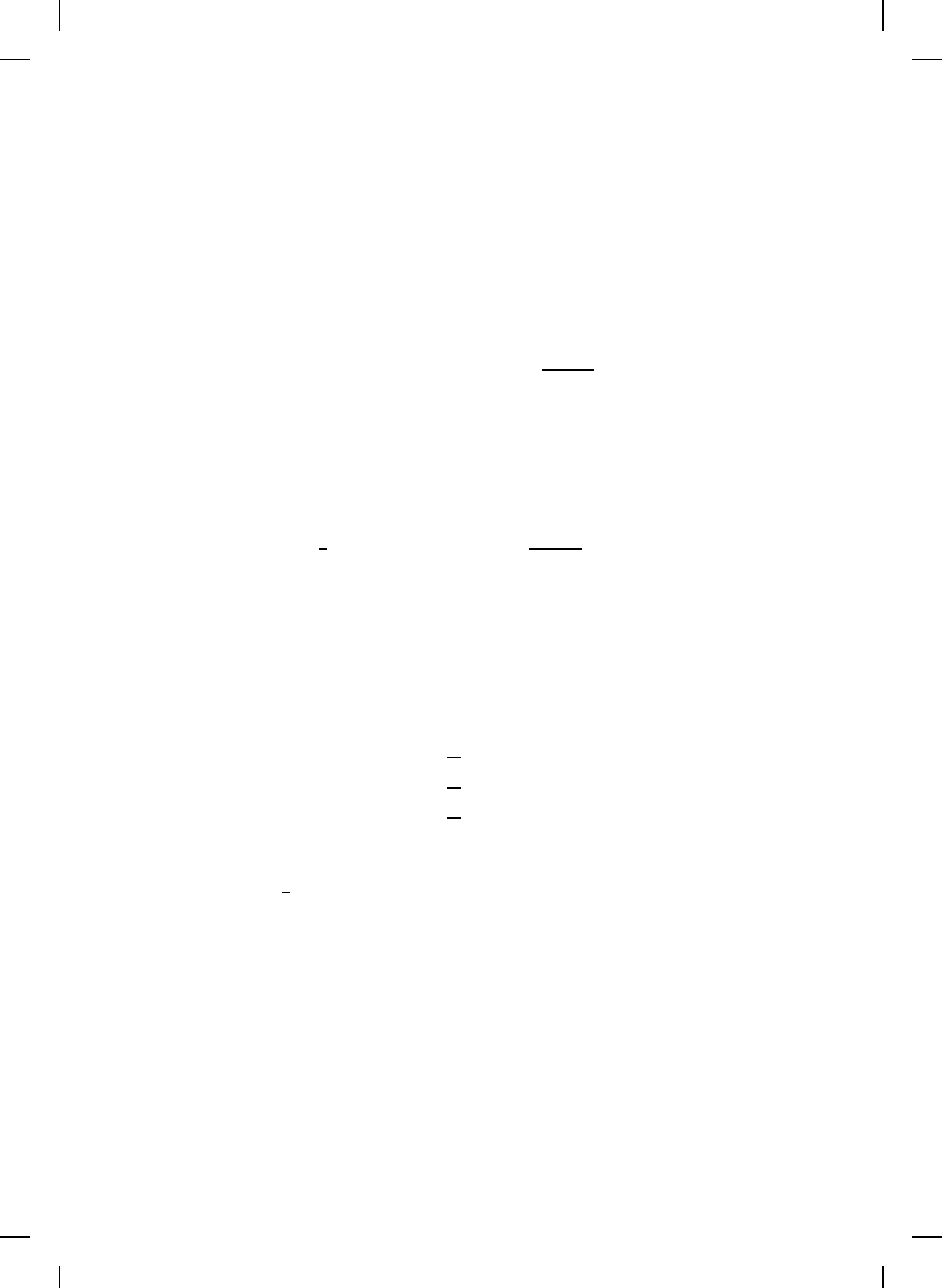
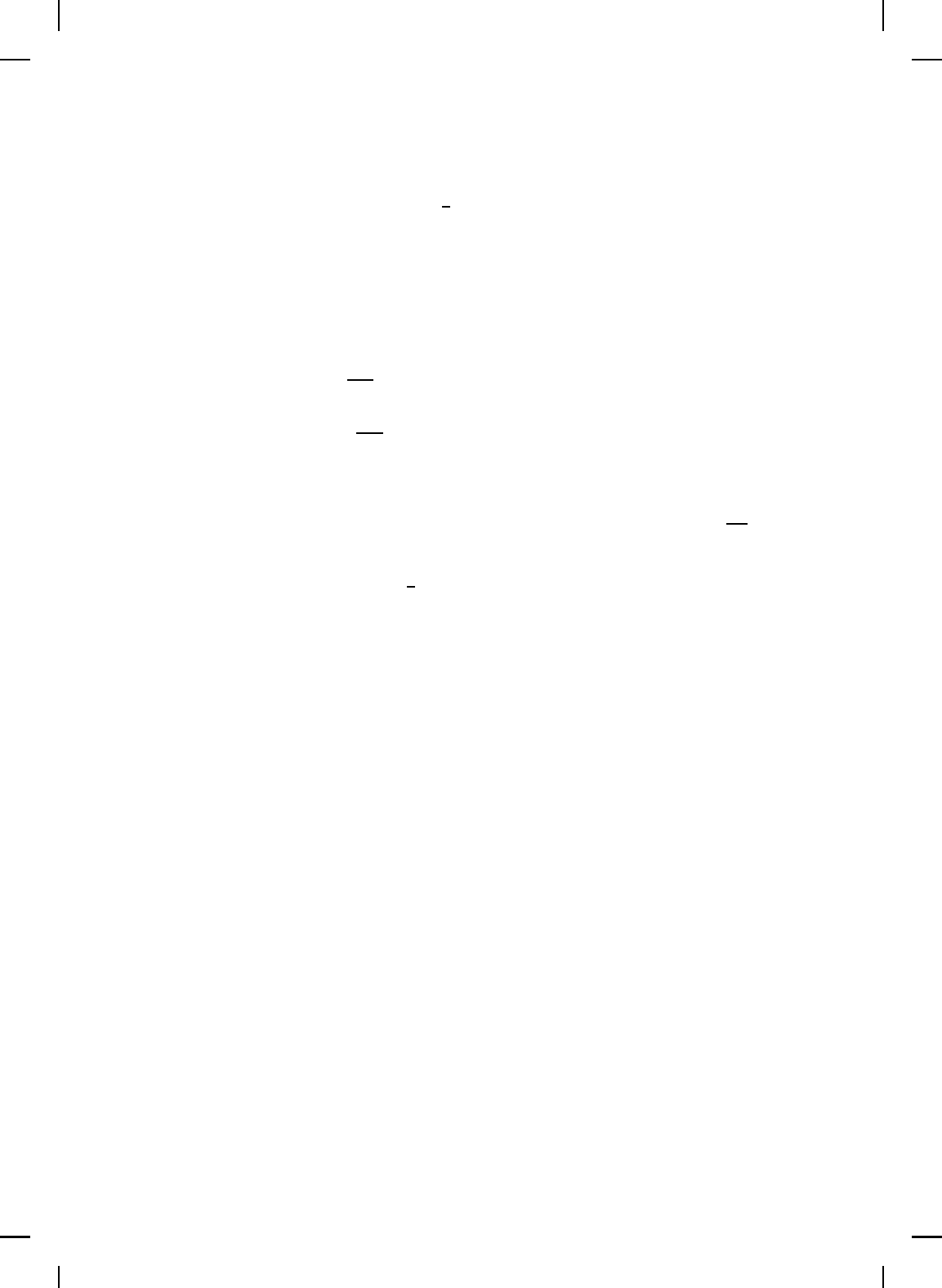
However, as shown in Figures 8.2 and 8.3, the inverse optimal controller with
a cross-weighting term in the performance functional has better transient
performance in terms of peak overshoot over the meaningful inverse optimal
controller. (We note that the controlled third state is not shown since it
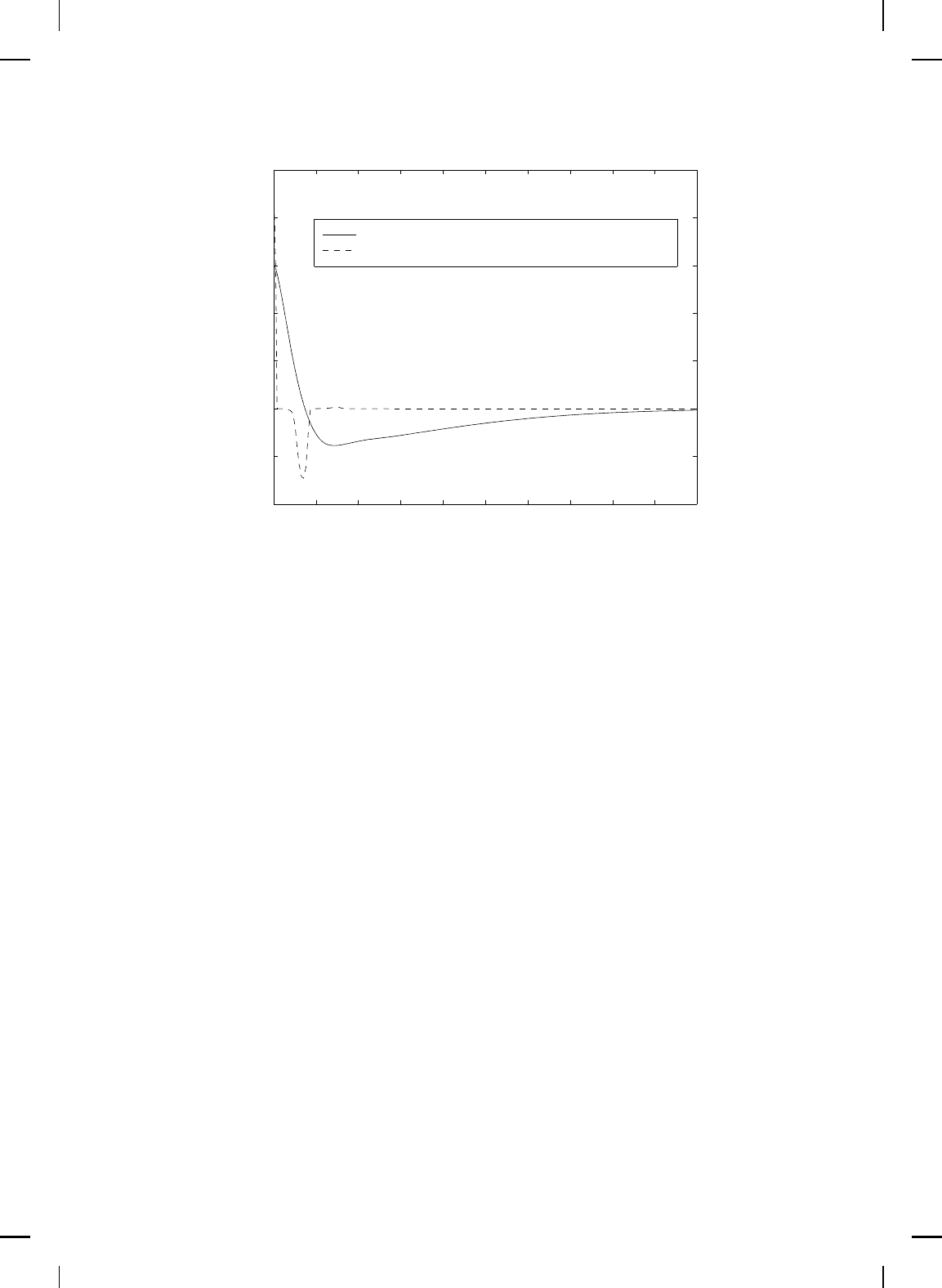
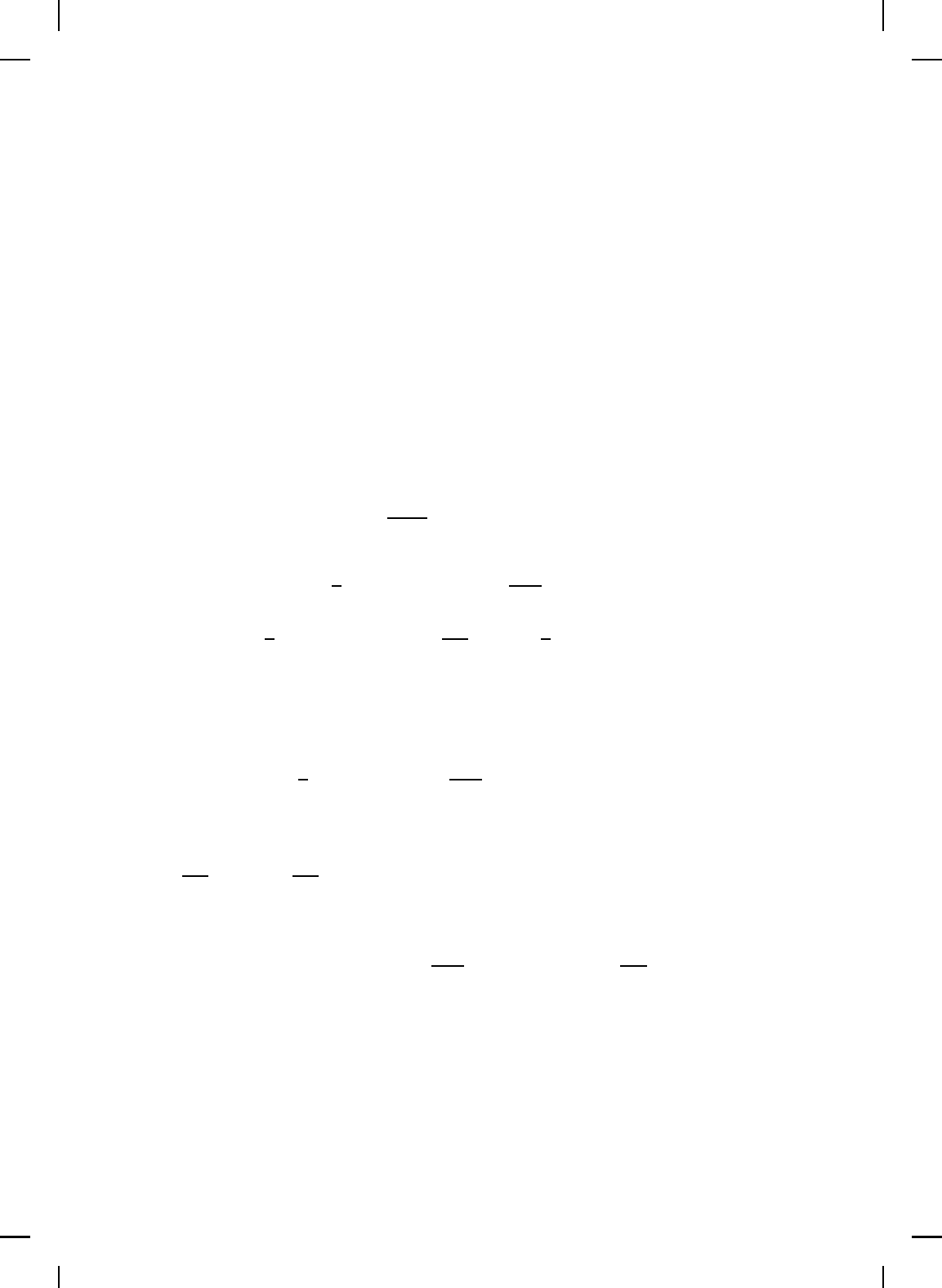
is virtually identical for both designs.) Finally, Figure 8.4 compares the
NonlinearBook10pt November 20, 2007
546 CHAPTER 8
control effort versus time for both controllers. △
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-20
-15
-10
-5
0
5
10
First State
Time
Inverse optimal controller
Meaningful inverse optimal controller
Figure 8.2 First state versus time.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-20
-15
-10
-5
0
5
10
15
20
25
30
Second State
Time
Inverse optimal controller
Meaningful inverse optimal controller
Figure 8.3 Second state versus time.
NonlinearBook10pt November 20, 2007
OPTIMAL NONLINEAR FEEDBACK CONTROL 547
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-400
-200
0
200
400
600
800
1000
Control Effort
Time
Inverse optimal controller
Meaningful inverse optimal controller
Figure 8.4 Control effort versus time.
8.9 Problems
Problem 8. 1. Show that every 2nth-order positive definite polynomial
function of the f orm V (x) =
P
n
q=1
(x
T
P
q
x)
q
, where P
1
> 0 and P
q
≥ 0,
q = 2, . . . , n, can be written as a q-multilinear function where q is even. Can
every multilinear function be written as a polynomial function?
Problem 8.2. Let A ∈ R
n×n
. Show that e
(
q
⊕A)
= (e
A
)
[q]
. I f, in
addition, d et A 6= 0, show
Z
t
0
e
(
q
⊕As)
ds = (
q
⊕ A)
−1
[e
(
q
⊕At)
− I
n
q
]. (8.165)
Finally, if α(A) < 0, show
Z
∞
0
e
(
q
⊕As)
ds = −(
q
⊕ A)
−1
. (8.166)
Problem 8.3. Consider the nonlinear dynamical system (8.38) an d let
V : D → R be a continuously differentiable function satisfying (8.41) and
(8.42). Then we say th at the feedback control law φ : D → Ω is optimal
with respect to V if
V
′
(x)F (x, φ(x)) ≤ V
′
(x)F (x, u), x ∈ D, u ∈ Ω. (8.167)

NonlinearBook10pt November 20, 2007
548 CHAPTER 8
Now, consider the linear controlled system
˙x(t) = Ax(t) + Bu(t), x(0) = x
0
, t ≥ 0, (8.168)
where x ∈ R
n
and u ∈ Ω
△
= {u ∈ R
m
: kuk
p
≤ 1}, where p = 1, 2, ∞.
Assume A is Hurwitz and define V (x) = x
T
P x, where P ∈ R
n×n
is the
unique positive-definite solution to
0 = A
T
P + P A + R, (8.169)
for a given n ×n positive-definite matrix R. Furthermore, let V (x) = x
T
P x
be the Lyapun ov function f or the closed-loop system (8.168) with u = φ(x).
For each value of p ∈ {1, 2, ∞}, construct a feedback control law u = φ(x)
that is optimal with respect to V (·) or, equivalently, gives a maximum time
decay rate of V (x).
Problem 8.4. Consider the algebraic Riccati equation (8.53) with R
1
= E
T
1
E
1
≥ 0. Show that the following statements are equivalent:
i) (A, B) is stabilizable and (A, E
1
) is detectable.
ii) There exists a nonnegative-definite solution P satisfying (8.53) and
A−BR
−1
2
B
T
P is Hu rwitz.
In addition, show that the following statements hold:
iii) If (A, E
1
) is detectable, then P is the only nonnegative-definite solution
to (8.53).
iv) If R
1
> 0, then P > 0.
Problem 8.5. Consider the linear controlled system (8.51) with quad-
ratic performance functional (8.52) and R
2
= I
m
. S how that if (A, B) is
controllable, −A is Hurwitz, and R
1
= 0, then
P =
Z
∞
0
e
−At
BB
T
e
−A
T
t
dt
−1
(8.170)
is a positive-definite solution to (8.53).
Problem 8.6. Consider the linear controlled system (8.51). Let R
1
∈
P
n
, R
2
∈ P
m
, α > 0, and assume there exists a positive-definite matrix
P ∈ R
n×n
such that
0 = (A + αI
n
)
T
P + P (A + αI
n
) + R
1
− P BR
−1
2
B
T
P. (8.171)
Show that th e linear controlled system (8.51) with feedback control law
u(t) = −R
−1
2
B
T
P x(t), (8.172)
NonlinearBook10pt November 20, 2007
OPTIMAL NONLINEAR FEEDBACK CONTROL 549
has the property that all the eigenvalues of the closed-loop system have
real part less than −α. Finally, show that the stabilizing controller (8.172)
minimizes
J(x
0
, u(·)) =
Z
∞
0
e
2αt
[x
T
(t)R
1
x(t) + u
T
(t)R
2
u(t)]dt. (8.173)
Problem 8.7. Consider the nonlinear dynamical system G given by
˙x(t) = f(x(t)) + G(x(t))u(t), x(0) = x
0
, t ≥ 0, (8.174)
y(t) = h(x(t)), (8.175)
where x ∈ R
n
, u, y ∈ R
m
, f : R
n
→ R
n
satisfies f(0) = 0, G : R
n
→ R
n×m
,
and h : R
n
→ R
m
satisfies h(0) = 0. Assume that G is passive, zero-
state observable, and completely reachable with a continuously differentiable
radially unbounded storage fu nction V
s
: R
n
→ R. Furtherm ore, let
V : R
n
→ R be a continuously differentiable function such that V (0) = 0,
V (x) > 0, x ∈ R
n
, x 6= 0, V (x) → ∞ as kxk → ∞, and
0 = L
1
(x) + V
′
(x)f(x) −
1
4
V
′
(x)G(x)R
−1
2
G
T
(x)V
′T
(x), x ∈ R
n
, (8.176)
where L
1
(x) = ℓ
T
(x)ℓ(x) + h
T
(x)R
−1
2
h(x) and ℓ(·) satisfies (5.115). Show
that the output feedback controller u(t) = −R
−1
2
y(t), where R
2
> 0,
asymptotically stabilizes (8.174) and minimizes th e performance criterion
J(x
0
, u(·)) =
Z
∞
0
[ℓ
T
(x(t))ℓ(x(t)) + h
T
(x(t))R
−1
2
h(x(t)) + u
T
(t)R
2
u(t)]dt,
(8.177)
in the sense that
J(x
0
, φ(x(·))) = min
u(·)∈S(x
0
)
J(x
0
, u(·)), x
0
∈ R
n
. (8.178)
Furth ermore, show that J(x
0
, φ(x(·))) = V (x
0
), x
0
∈ R
n
.
Problem 8.8. Consider the nonlinear oscillator
˙x
1
(t) = x
2
(t), x
1
(0) = x
10
, t ≥ 0, (8.179)
˙x
2
(t) = −x
1
(t) + x
2
(t)sinh(x
2
1
(t) + x
2
2
(t)) + u(t), x
2
(0) = x
20
. (8.180)
Find a globally stabilizing feedback controller u(t) = φ(x(t)) that minimizes
J(x
10
, x
20
, u(·)) =
Z
∞
0
[x
2
2
(t) + u
2
(t)]dt. (8.181)
Compare the state r esponse and the control effort of the optimal controller to
the feedback linearizing control law u
FL
(t) = −x
2
(t)[1+ sinh(x
2
1
(t) + x
2
2
(t))].
Problem 8.9. Consider the nonlinear oscillator
˙x
1
(t) = x
2
(t), x
1
(0) = x
10
, t ≥ 0, (8.182)
NonlinearBook10pt November 20, 2007
550 CHAPTER 8
˙x
2
(t) = −e
x
2
(t)[x
1
(t)+
1
2
x
2
(t)]
+
1
2
x
2
(t)e
4x
1
(t)+3x
2
(t)
+ e
2x
1
(t)+2x
2
(t)
u(t),
x
2
(0) = x
20
. (8.183)
Find a stabilizing feedb ack controller u(t) = φ(x(t)) that minimizes
J(x
10
, x
20
, u(·)) =
Z
∞
0
[x
2
2
(t) + u
2
(t)]dt. (8.184)
Is your controller a global stabilizer?
Problem 8.10. Consider the nonlinear dynamical system
˙x
1
(t) = −x
3
1
(t) + x
1
(t)x
2
2
(t), x
1
(0) = x
10
, t ≥ 0, (8.185)
˙x
2
(t) = −x
2
(t) + x
2
1
(t)u(t), x
2
(0) = x
20
. (8.186)
Find a stabilizing feedb ack controller u(t) = φ(x(t)) that minimizes
J(x
10
, x
20
, u(·)) =
Z
∞
0
[2x
2
1
(t) + 2x
2
2
(t) +
1
2
u
2
(t)]dt. (8.187)
Problem 8.11. Show that in the case w here 0 < r ≤ 1, the
uncontrolled (u(t) ≡ 0) Lorentz dynamical system (8.80)–(8.82) has only
one equilibrium state, namely, x
e1
△
= (0, 0, 0)
T
. Alternatively, show that
in the case where r > 1, the uncontrolled Lorentz dynamical system
(8.80)–(8.82) has three equilibrium states, namely, x
e1
, x
e2
△
= (
p
b(r − 1),
p
b(r − 1), r − 1)
T
, and x
e3
△
= (−
p
b(r − 1), −
p
b(r − 1), r − 1)
T
. Finally,
show that if r ≤ 1, x
e1
is a locally asymptotically stable equilibrium point
while if r > 1, x
e1
is unstable. What can you say about the stability of x
e2
and x
e3
?
Problem 8.12. Using Theorem 8.3 construct a globally asymp totically
stabilizing control law for the equilibrium state x
e
△
= (
p
b(r − 1),
p
b(r − 1),
r − 1)
T
, r > 1, of the controlled Lorentz dynamical system (8.80)–(8.82).
Problem 8.13. Consider the nonlinear controlled system (8.56) with
performance functional (8.58). Assume there exists a continuously differ-
entiable function V : R
n
→ R and a function L
2
: R
n
→ R
1×m
such that
(8.59)–(8.61) and (8.63) hold, and
V
′
(x)f
s
(x) ≤ 0, x ∈ R
n
, (8.188)
W
△
= {x ∈ R
n
: L
k+1
f
s
V (x) = L
k
f
s
L
G
i
V (x) = 0, k = 0, 1, . . . , i = 1, . . . , m}
= {0}, (8.189)
where f
s
(x)
△
= f(x) −
1
2
G(x)R
−1
2
(x)L
T
2
(x). Show that, with the feedback
control law (8.65), the zero solution x(t) ≡ 0 of the closed-loop system (8.64)
NonlinearBook10pt November 20, 2007
OPTIMAL NONLINEAR FEEDBACK CONTROL 551
is globally asymptotically stable, and the perf ormance functional (8.58) w ith
L
1
(x) given by (8.66) is minimized in the sense that (8.67) and (8.68) hold.
Problem 8.14. Assume the controlled system (8.56) with output
y(t) = h(x(t)), where h : R
n
→ R
m
, is minimum phase with relative
degree {1, 1, . . . , 1} and complete and involutive vector field G(L
G
h)
−1
.
Furth ermore, let
V (x) = V
0
(z) + y
T
P y, (8.190)
L
T
2
(x) = R
2
(x)[L
G
h(x)]
−1
[P
−1
r
T
(z, y)
∂V
0
(z)
∂z
T
+ 2L
f
h(x)],
(8.191)
where V
0
: R
n−m
→ R is a continuously differentiable positive-definite
function such that V
0
(0) = 0, V
′
0
(z)f
0
(z) < 0, z ∈ Z
△
= {x ∈ R
n
: h(x) = 0},
and ˙z = f
0
(z), and where P is an arbitrary m × m positive-definite matrix
and r(z, y) is defined as in Lemma 6.2. Show that the feedback control law
φ(x) = −
1
2
[L
G
h(x)]
−1
[P
−1
r
T
(z, y)
∂V
0
(z)
∂z
T
+ 2L
f
h(x)]
−R
−1
2
(x)[L
G
h(x)]
T
P h(x), (8.192)
globally asymptotically stabilizes (8.56) and minimizes the performance
functional (8.58) with L
1
(x) given by (8.66) in the sense that (8.67) and
(8.68) hold.
Problem 8.15. Consider the nonlinear dynamical system representing
a controlled rigid spacecraft with one torque input given by
˙x
1
(t) = I
23
x
2
(t)x
3
(t) +
b
1
I
1
u(t), x
1
(0) = x
10
, t ≥ 0, (8.193)
˙x
2
(t) = I
31
x
3
(t)x
1
(t) +
b
2
I
2
u(t), x
2
(0) = x
20
, (8.194)
˙x
3
(t) = I
12
x
1
(t)x
2
(t) +
b
2
I
3
u(t), x
3
(0) = x
30
, (8.195)
where I
23
= (I
2
−I
3
)/I
1
, I
31
= (I
3
−I
1
)/I
2
, I
12
= (I
1
−I
2
)/I
3
, and I
1
, I
2
, and
I
3
are principal moments of inertia of the spacecraft. Using Problem 8.13
with V (x) =
1
2
(I
1
x
2
1
+ I
2
x
2
2
+ I
3
x
2
3
) and L
2
(x) = 0, where x = [x
1
x
2
x
3
]
T
,
construct a globally stabilizing controller for (8.193)–(8.195).
Problem 8.16. Consider the nonlinear dynamical system
˙x
1
(t) = u
1
(t), x
1
(0) = x
10
, t ≥ 0, (8.196)
˙x
2
(t) = u
2
(t), x
2
(0) = x
20
, (8.197)
˙x
3
(t) = x
1
(t)x
2
(t), x
3
(0) = x
30
, (8.198)
representing a controlled rigid spacecraft with two actuators along the
principal axes and whose uncontrolled principal axis is not an axis of
NonlinearBook10pt November 20, 2007
552 CHAPTER 8
symmetry. Using Problem 8.14 with
y
1
(t) = x
1
(t) + αx
k
3
(t), (8.199)
y
2
(t) = x
2
(t) + βx
k+1
3
(t), (8.200)
where k is a positive integer and α, β are arbitrary real numbers, construct
a globally stabilizing controller for (8.196)–(8.198).
Problem 8.17. Prove Theorem 8.10.
Problem 8.18. Consider the port-controlled Hamiltonian system given
by (6.22) with performance functional (8.58). Assume that there exist
functions H
s
, H
c
: D → R, J
s
, J
a
: D → R
n×n
, R
s
, R
a
: D → R
n×n
such
that H
s
(x) = H(x) + H
c
(x) is continuously differentiable, J
s
(x) = J(x) +
J
a
(x), J
s
(x) = −J
T
s
(x), R
s
(x) = R(x)+R
a
(x), R
s
(x) = R
T
s
(x) ≥ 0, x ∈ D,
condition (6.25) is satisfied, and
∂
2
H
s
∂x
2
(x) > 0, x ∈ D, (8.201)
[J
s
(x) − R
s
(x) +
1
2
G(x)R
−1
2
(x)G
T
(x)]
∂H
c
∂x
(x)
T
= [−[J
a
(x) − R
a
(x)]
−
1
2
G(x)R
−1
2
(x)G
T
(x)]
∂H
∂x
(x)
T
−
1
2
G(x)R
−1
2
(x)L
T
2
(x), x ∈ D.
(8.202)
Show that the equ ilibr ium solution x(t) ≡ x
e
of th e closed-loop system given
by (6.24) is Lyapunov stable with the feedback control law
φ(x) = −
1
2
R
−1
2
(x)
G
T
(x)
∂H
s
∂x
(x)
T
+ L
T
2
(x)
!
, x ∈ D. (8.203)
If, in addition, D
c
⊆ D is a compact positively invariant set with respect
to (6.24) and the largest invariant set contained in R
△
= {x ∈ D
c
:
∂H
s
∂x
(x)R
s
(x)
∂H
s
∂x
(x)
T
= 0} is M = {x
e
}, show that the equilibrium
solution x(t) ≡ x
e
of the closed-loop system (6.24) is locally asymptotically
stable. Moreover, show that the performance functional (8.58), with
L
1
(x) = φ
T
(x)R
2
(x)φ(x) −
∂H
s
∂x
(x) [J(x) − R(x)]
∂H
∂x
(x)
T
, (8.204)
is minimized in the sense that
J(x
0
, φ(x(·))) = min
u(·)∈C(x
0
)
J(x
0
, u(·)), x
0
∈ D
c
, (8.205)
and J(x
0
, φ(x(·))) = H
s
(x
0
) − H
s
(x
e
), x
0
∈ D
c
.
NonlinearBook10pt November 20, 2007
OPTIMAL NONLINEAR FEEDBACK CONTROL 553
Problem 8.19. Consider the nonlinear d ynamical system G given
by (8.100) and assume that G is a J-Q type system (see Problem 6.25)
so that there exists a continuously differentiable positive-definite, radially
unbounded function V : R
n
→ R satisfying i) an d ii) of Problem 6.25. Show
that with the feedback stabilizing control law
φ(x) = −κ[V
′
(x)G(x)]
T
, κ > 0, (8.206)
the nonlinear system (8.100) and (8.101) has a disk margin (0, ∞). Further-
more, with the feedback control law u = φ(x), show that the performance
functional
J(x
0
, u(·)) =
Z
∞
0
κ
2
[V
′
(x(t))G(x(t))][V
′
(x(t))G(x(t))]
T
−V
′
(x(t))f(x(t)) +
2
κ
u
T
(t)u(t)
dt, (8.207)
is minimized in the sense that
J(x
0
, φ(x(·))) = min
u(·)∈S(x
0
)
J(x
0
, u(·)), x
0
∈ R
n
. (8.208)
Problem 8.20. Consider the nonlinear dynamical system G given by
(8.100) and let V : R
n
→ R be a continuously differentiable positive-definite,
radially unbounded control L yapunov function for (8.100). Let φ : R
n
→ R
m
satisfy
kφ(x)k = min{kuk : V
′
(x)[f(x) + G(x)u] ≤ −σ(x), u ∈ R
m
}, x ∈ R
n
,
(8.209)
where k · k denotes the Euclidean norm, σ : R
n
→ R is a continuous
positive-definite function such that V
′
(x)f(x) ≤ −σ(x), x ∈ R
△
= {x ∈
R
n
: V
′
(x)G(x) = 0}. Show that the control law φ(x) given by (8.209) is
globally stabilizing and inverse optimal with respect to the cost functional
J(x
0
, u(·)) =
Z
∞
0
[L
1
(x(t)) + u
T
(t)R
2
(x(t))u(t)]dt, (8.210)
where L
1
(x) ≥ 0 and R
2
(x) > 0, x ∈ R
n
. If, in addition,
σ(x) =
q
α
2
(x) + q(x)β
T
(x)β(x),
where α(x)
△
= V
′
(x)f(x), β(x)
△
= V
′
(x)G(x), and q : R
n
→ R is a
nonnegative function, show that the control law φ(x) given by (8.209)
specializes to
φ(x) =
(
−
α(x)+
√
α
2
(x)+q(x)β
T
(x)β(x)
β
T
(x)β(x)
β(x), β(x) 6= 0,
0, β(x) = 0.
(8.211)
Finally, let κ : R → R be a continuously differentiable class K function and
let
ˆ
V : R
n
→ R be a continuously differentiable positive-definite, radially
NonlinearBook10pt November 20, 2007
554 CHAPTER 8
unbounded fun ction such that V (x) = κ(
ˆ
V (x)) and
0 =
ˆ
V
′
(x)f(x) + q(x) −
1
4
ˆ
V
′
(x)G(x)G
T
(x)
ˆ
V
′T
(x). (8.212)
Show th at the control law u = φ(x) given by (8.211) minimizes the cost
functional
J(x
0
, u(·)) =
Z
∞
0
[q(x(t)) + u
T
(t)u(t)]dt. (8.213)
Problem 8.21. Consider the port-controlled Hamiltonian s ystem
˙x(t) = J(x(t))
∂H
∂x
(x(t))
T
+ G(x(t))u(t), x(0) = x
0
, t ≥ 0, (8.214)
y(t) = G
T
(x(t))
∂H
∂x
(x(t))
T
, (8.215)
where x ∈ R
n
, u, y ∈ R
m
, H : D → R, G : R
n
→ R
n×m
, and J : R
n
→
R
n×n
satisfies J(x) = −J
T
(x). Assume that (8.214) an d (8.215) is zero-
state observable. Sh ow that the feedback control law φ(x) = −G
T
(x)
∂H
∂x
T
asymptotically stabilizes (8.214) and minimizes th e perf orman ce functional
J(x
0
, u(·)) =
1
2
Z
∞
0
[y
T
(t)y(t) + u
T
(t)u(t)]dt. (8.216)
8.10 Notes and References
The results in Sections 8.2 and 8.3 on stability analysis and optimal control
of nonlinear systems are due to Bernstein [43]. In particular, Bernstein [43]
gives an excellent review of the nonlinear-nonquadratic control problem in
a simplified and tutorial manner. Polynomial forms in the performance
criterion were developed by Speyer [411] while multilinear forms were
addressed by Bass and Webber [33]. A treatment of nonlinear-nonquadratic
optimal control is also given by Jacobson [217]. T he invers e optimal control
problem has been studied by numerous authors including Kalman [227],
Moylan and Anderson [321], Moylan [320], Molinari [317], Jacobson [217],
Anderson and Moore [10], Wan and Bernstein [449], and m ore recently by
Freeman and Kokotovic [127,128]. The presentation here parallels that given
by Wan and Bernstein [449].
The equivalence between optimality and passivity is d ue to Kalman
[227] for linear systems and Moylan [320] for nonlinear s ystems. Gain,
sector, and disk margins of nonlinear-nonquadratic optimal regulators
with performance measures involving cross-weighting terms are due to
Chellaboina and Haddad [85]. An excellent treatment on m eaningful inverse
optimality is given by Freeman and Kokotovi´c [128] and Sepulchre, Jankovi´c,
and Kokotovi´c [395].