Georgi, Howard. Physics 16 - Mechanics and Special Relativity (англ.)
Подождите немного. Документ загружается.


Howard Georgi
Physics 16
Mechanics and Special Relativity
Official source site: http://www.courses.fas.harvard.edu
Newtonian mechanics and special relativity for students with good preparation in
physics and mathematics at the level of the advanced placement curriculum.
Topics include an introduction to Lagrangian mechanics, Noether's theorem,
special relativity, collisions and scattering, rotational motion, angular momentum,
torque, the moment of inertia tensor, oscillators damped and driven, gravitation,
planetary motion, and an introduction to cosmology.
“If you are doing everything well, you are not doing enough”
Howard Georgi
Mallinckrodt Professor of Physics; Harvard College Professor;
Master of Leverett House; Head Tutor;
PhD 1971, Yale University
Howard Georgi is best known for early work in Grand Unification and gauge coupling
unification within SU(5) and SO(10) groups (see Georgi-Glashow model).
Georgi has for many years taught an advanced freshman physics course, "Physics 16" in the
fall semester. He is also Director of Undergraduate Studies in Physics and has been Co-Master of
Leverett House with his wife, Ann Blake Georgi, since 1998. He graduated from Harvard
College in 1967 and obtained his Ph.D. from Yale University in 1971. He was Junior Fellow in
the Harvard Society of Fellows from 1973-1976 and a Senior Fellow from 1982-1998. In 1995
he was elected to the National Academy of Sciences and received the Sakurai Prize; in 2000 he
shared the Dirac Medal with Jogesh Pati and Helen Quinn. He has advised a number of notable
students, including Andrew G. Cohen, Adam Falk, Benjamin Grinstein, John Hagelin, Lawrence
J. Hall, David B. Kaplan, Michael Luke, Aneesh Manohar, Ann Nelson and Lisa Randall.
Georgi proposed an SU(5) GUT model with softly broken supersymmetry with Savas
Dimopoulos in 1981. This paper is one of the foundational works for the supersymmetric
Standard Model (MSSM). After the measurements of the three Standard Model gauge couplings
at LEP I in 1991, it was shown that particle content of the MSSM, in contrast to the Standard
Model alone, led to precision gauge coupling unification.
He has since worked on several different areas of physics including composite Higgs models,
heavy quark effective theory, dimensional deconstruction, little Higgs, and unparticle theories.
Unparticle physics is a theory that there exists matter that cannot be explained in terms of
particles, because its components are scale invariant. Howard Georgi proposed this theory in the
spring of 2007 in the papers "Unparticle Physics" and "Another Odd Thing About Unparticle
Physics".
Together with Vadim Alexeevich Kuzmin, Georgi received the Pomeranchuk Prize of the
Alikhanov Institute for Theoretical and Experimental Physics (ITEP) in 2006.
Georgi has published several books, the best known of which is Lie Algebras in Particle
Physics published by World Scientific. He has also published The Physics of Waves and Weak
Interactions and Modern Particle Theory.

Lecture topics
Topics for Lecture 1
What is classical mechanics?
The Art of Theoretical Physics
Degrees of freedom
Motion, trajectories and F=ma
F=ma implies two initial conditions per
degree of freedom
Two initial conditions per degree of
freedom implies F=ma
So what?
Finding trajectories numerically (next time
produce some pictures)
Forces of the form F(t)
Topics for Lecture 2
Forces of the form F(v)
Example: F(v) = – m Г v
Another example: F(v) = – m v
2
Forces of the form F(x)
Review of the harmonic oscillator
Linearity and Time Translation Invariance
Back to F(v) = – m Г v
Topics for Lecture 3
Consequences of Time Translation
Invariance and Linearity
Uniform circular motion
Harmonic oscillation for more degrees of
freedom
The double pendulum
The damped harmonic oscillator
Forced oscillation and resonance
Harmonic driving forces
Topics for Lecture 4
Conservation laws
Work and Energy and the second Law
Energy in the harmonic oscillator
Work and Energy in three dimensions
Examples of potentials in 3-dimensions
A particle on a frictionless track
Energy in the driven oscillator
Breaking the wine glass
Topics for Lecture 5
Newton's second law and momentum
The third law
Rocket motion
Scattering and kinematics
Elastic collisions
Inelastic collisions
The speed of a bullet
More elastic collisions
Topics for Lecture 6
Beyond F=ma
Hamilton's principle
Functions of functions
Calculus of variations
Functional derivatives
Finding functional derivatives
Back to Hamilton's principle
More degrees of freedom
The Lagrangian and the action
Quantum mechanics and the sum over
paths
Appendix: On the functional Taylor series
Topics for Lecture 7
The Lagrangian and Euler-Lagrange
equations
Example - bead on a expanding ring
Example - bead on a rotating rod
More degrees of freedom
Example - frictionless table
Generalized Force and Momentum
Example - Reduced mass and center of
mass
Energy again
Example - Atwood's machine
Topics for Lecture 8
Symmetries and transformations
Example: space translations for one
particle
Space translations for two particles
Space translations for many particles
Finding Symmetries
Rotations
Noether's theorem
Momentum conservation from Noether's
theorem
More on rotations
What functions are invariant?
Topics for Lecture 9
The structure of science and common
sense
The speed of light
Time dilation
The twin paradox
The Doppler effect
The twin paradox and inertial frames
Topics for Lecture 10
Lorentz contraction
Relativity of simultaneity
Spacetime events
Ticks of a moving light clock
The invariant interval
Lorentz transformations
Addition of velocities
Interlude on relativistic units
Varieties of space-time intervals
Topics for Lecture 11
World lines and proper time
Massive particles
Energy and momentum
Lorentz transformation of energy-
momentum
Energy, momentum, velocity and mass
Massless particles
4-vectors and the invariant product
Topics for Lecture 12
General addition of velocities
Particle collisions
K
+
decay
Neutrino scattering
Minimizing and maximizing
decay
Colliders
Topics for Lecture 13
Causality and rigid bodies
Forces
Relativistic strings
Color force
A relativistic oscillator
The moving oscillator
Topics for Lecture 14
Rocket motion
Good questions
Spinning relativistic string
Relativistic Traffic
Topics for Lecture 15
Review of circular motion
Cross products - introduction
More general motion about an axis
Small rotations
The reference point
Rigid bodies rotating about a fixed axis
The parallel axis theorem
Planar bodies moving in a plane
Topics for Lecture 16
Torque - fixed reference point
Example --- oscillations of a hanging rod
Torque - moving reference point
Example --- Rolling ring
The three dumbbells
Topics for Lecture 17
The angular velocity vector
Impulse and elastic collisions
Rigid bodies are weird
The angular velocity vector
An impulsive demo
Topics for Lecture 18
Impulse and rigid bodies
The moment of inertia tensor
and
The body frame
Topics for Lecture 19
Guessing principal axes
Another example - rectangular solids
Rotation about a principal axis
When principal moments are equal
Proof of the reflection theorem
Finishing the impulse problem
The final velocities
Topics for Lecture 20
The free symmetric top in the space frame
Precession of tops
Nutation
Vectors in the body frame
Topics for Lecture 21
The free symmetric top in the body frame
Euler's equations
The free symmetric top from Euler's
equations
The tennis racket theorem
Topics for Lecture 22
forces
The force between spheres
Central forces
Energy and angular momentum
Tidal forces
Extra Dimensions
Topics for Lecture 23
The physics of fictitious forces
Precession of the equinoxes
Topics for Lecture 24
The Cosmological Principle and the Hubble
expansion
Newton's theorem and the expansion of the
Universe
Hubble dynamics
Dynamics of a flat universe
Newton's theorem and dark matter
Topics for Lecture 25
The shape of physics
Elementary particles and their masses
Vacuum states, symmetry and GUTs
Symmetry and GUTs
States of the vacuum
Topics for Lecture 26
Running Hubble backwards
Relativistic cosmology
Back to the big bang
Thermal equilibrium
The hot bang and the CMBR
Topics for Lecture 27
Before the big bang
Inflation
The cosmological principle and the Taylor
expansion
The cosmological constant
The laws of physics and the Taylor
expansion
lecture 1
Topics:
What is classical mechanics?
Degrees of freedom
The Art of Theoretical Physics
Motion, trajectories and F = m a
F = ma implies two initial conditions per degree of freedom
Two initial conditions per degree of freedom implies F = ma
So what?
Finding trajectories numerically
Forces of the form F (t)
What is classical mechanics?
Classical mechanics is a category defined by what it is not! It is not quantum mechanics. A classi-
cal mechanical system is any collection of objects that we can describe to a good approximation
without worrying about quantum mechanics. This includes most of the systems you are used to in
everyday life (if you don’t worry too much about what goes on inside your computer or CD player
or TV set). In this course, we will discuss these mechanical systems, and we will push beyond
your everyday experience to discuss what happens when objects move at speeds close to the speed
of light. We won’t study quantum mechanics explicitly, but we will talk about it at times. The
underlying laws of the Universe seem to be quantum mechanical, and it is fun, instructive, and
not at all trivial to think about how classical physics emerges as an approximation to the quantum
mechanical world.
Degrees of freedom
We will start slowly, with some useful definitions.
Coordinates — The coordinates of a physical system are the numbers (possibly dimensional)
that describe the system at a given fixed time.
Configuration — The configuration q(t) of a mechanical system is a number or vector consist-
ing of values of a set of independent coordinates that complete describe the system.
We will call the configuration q, without specifying (at least for another few seconds) whether q is
a single variable, or some kind of vector describing several coordinates at once. The word “inde-
pendent” in the definition means that none of the numbers in our set of coordinates is redundent or
dependent of the others. That is we asume that the coordinates in the configuration are indepen-
dent in the sense that each can in independently changed, and each different set of values describes
something physically different. Given a set of values of the coordinates at some particular time,
we can figure out what the configuration is and thus what the system looks like at that time. Thus
a configuration is just a mathematical snapshot of the system at a given time.
One way of describing the underlying problem of classical mechanics is that we want to under-
stand how the configuration of the system evolves with time. That is we want to put the snapshots
together into a mathematical movie to describe how the system moves.
1
Degrees of freedom — The number of independent components of the configuration q is called
the number of degrees of freedom of the mechanical system.
The number of degrees of freedom is the number of independent ways in which the system can
move. Here are some examples. A point mass sliding on an airtrack, described by only a single co-
ordinate, has one degree of freedom. We get more degrees of freedom if we go to more dimensions
or to more complicated objects.
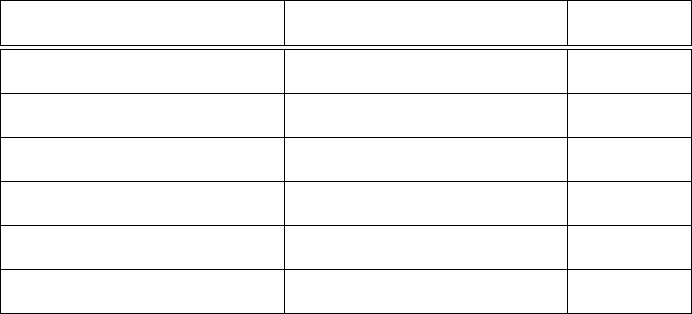
system coordinate # of DOFs
point mass on a track ` (distance along the track) 1
point mass on a flat surface (x, y) 2
point mass in 3-d ~r = (x, y, z) 3
rigid body in 3-d ~r of center + 3 angles 6
2 masses + massless spring ~r
1
and ~r
2
6
2 masses + massive spring ~r
1
, ~r
2
and spring “∞”
A continuous massive spring formally has an infinite number of degrees of freedom, because to
specify its configuration we would have to give a continuous function describing how much every
point on the spring is stretched. Really, of course, a physical spring has a finite but very large
number of degrees of freedom, because it is not actually continuous, but is made up of atoms. But
the difference between ∞ and Avogadro’s number is often not very important.
This brings up an important philosophical point. What the heck is a “point” mass? What is a
“rigid” body? What is a “massless” spring? Most of you have probably been dealing with physics
problems for so long that you are used to these phrases. But it is important to remember that these
are mathematical idealizations. Real physical systems are complicated, and in fact, what we choose
for q may depend on what kind of physical questions we want to ask and what level of accuracy we
need in the answer. So for example, for a hockey puck sliding on the ice at the Boston Garden, we
might decide that the configuration is specified by giving the x and y coordinates that determine
the puck’s position in the plane of the ice. Then q would stand for the two dimensional vector,
(x, y). But if we do this, we have ignored many details. For example, for a shot that comes off
the ice, we would need to include the z coordinate to describe the motion of the puck. For some
purposes, we would also need to include descriptions of the puck itself. For example, we have
not included an angular variable that would allow us to specify how the puck is turned about its
vertical axis. This is probably good enough for most problems. But sometimes, more information
is required to give a good description of the physics. For example, if we wanted to understand how
a rapidly rotating puck moves, we might need this more detailed information. We could also go on
and describe how the puck might deform when hit by the stick, and so on. We could include more
and more information until we got down to the level where we begin to see the molecular structure
of the rubber of the puck. At this point, we begin to see quantum mechanical effects, and classical
mechanics is no longer enough to give an accurate description.
2

The Art of Theoretical Physics
This is a good lesson. The coordinates that we use to describe the system may depend on what
kind of information we want to get out of our mechanical model of the system, and how accurately
we want our model to reproduce reality. We usually will not go over these niceties each time we
discuss a system, but they are important to remember. There is really a very important point here.
In physics courses, we frequently discuss “toy” systems which are obviously oversimplified, in
which we have clearly left out features that are important in the “real world.” This is not something
to apologize for. This is precisely the art of theoretical physics. We work hard to abstract the
essential physics of a system, without including things that don’t matter at the level of description
that we are interested in. This down-to-earth ability to focus on the crucial parameters is far more
important than fancy mathematical gymnastics.
In fact, I believe, getting better at this art is one of the most useful things you can get out of
this course. It is generally useful far beyond this or future physics courses. The ability to build
mathematical models of phenomena is crucial to many fields. But models can be as misleading as
they can be useful unless they focus on the right parameters, and unless the modeler is aware of the
model’s limitations. Physics is the paradigm for this kind of thinking. This is one of the reasons
why, over the years, trained physicists have been so much in demand in very different fields.
Motion, trajectories and F = m a
Trajectory — A trajectory is a possible motion of a physical system.
We describe a trajectory by giving the value, q(t) of the coordinates of the system as a function
of time. There are an infinite number of possible trajectories for any interesting physical system
(that is, unless everything is nailed down and completely fixed). Our everyday experience tells us
that knowing the configuration of the system at some time is not enough information to allow us
to calculate the trajectory. A snapshot doesn’t tell us how the system is moving. We also need to
know the velocity of the system — the derivative of q with respect to time. We will sometimes use
the notation of a dot over an object to represent a time derivative:
˙q(t) ≡
d
dt
q(t) . (1)
If q describes more than one coordinate, then ˙q describes the same number of independent veloci-
ties - but we will continue to call ˙q the velocity, even if it has multiple components. If q is a vector,
˙q is the same kind of vector. For the hockey puck,
q = (x, y) , ˙q = ( ˙x, ˙y) . (2)
Then we can say that if we know q and ˙q at a particular time, we should be able to calculate the
trajectory. For example, if we know where the hockey puck is and how fast and in what direction it
is moving, we can plot its trajectory by just assuming that it continues to move at a constant speed
along the line determined by its position and velocity.
3

Something important has happened. I have snuck in one of the critical assumptions of mechan-
ics. Let me say it with the formality it deserves.
A — The trajectory, or subsequent motion, of a mechanical system is com-
pletely determined if we know the configuration, q and the velocity, ˙q at some
given time.
(3)
Because the number of components of q and of ˙q are both equal to the number of degrees of
freedom, this means that we have to specify two constants per degree of freedom in order to
specify how the system moves. This is a biggie. We will come back to this, as you will see.
One of the central problems of mechanics is to calculate what these trajectories are for various
systems — that is to say, to figure out how things move. To begin, let us think about what this
process is like for a system specified by a single coordinate, x. Newton tells us that to figure out
how x changes as a function of time, we define our coordinates in an appropriate inertial frame
(we’ll talk much more about what this means later) and use his second law
F = m a (4)
where F is the force on the object, m is its mass, and a is its acceleration (also sometimes written
as ¨x — one dot for each time derivative)
a ≡
d
2
dt
2
x ≡ ¨x (5)
We will have much more to say about mass, but for now, we will just assume that m is a fixed
property of the object. The force, F , is more complicated. In general, F will depend on what the
system is doing. Since we have already assumed that all we need to know about the system at a
given time is q and ˙q, in this case x and ˙x, all F can depend on is q, ˙q and t. So in general, F
at time t is some function of x and ˙x, at that same time, and t, F
³
x(t), ˙x(t ), t
´
. Then Newton’s
second law becomes a formula for the acceleration:
¨x =
1
m
F (x, ˙x, t) (6)
Note that in general, in Newton’s second law, the force is a function of all three variables, x,
˙x, and t. Because of things like this, we will often have to discuss the calculus of functions of
several variables. I realize that some of you are just beginning to study this subject formally in
math courses. In general, in this course, I will often make use of mathematics that many of you
have not seen. We won’t be using any deep properties of the subject, just things that you would
guess immediately from your knowledge of calculus of a single variable, vectors, and algebra. The
proofs can wait until (or if) you take the appropriate math course. The important thing is that you
try to understand the physics, and not faint when unfamiliar mathematics is thrown at you.
F = ma Implies A
Now the first deep question I want to address is this: Why should the fundamental law of me-
chanics (which Newton’s second law certainly is) be a formula for acceleration? A partial answer
comes from the mathematics. A formula like (6) is called a second order differential equation
4
because it involves a second derivative but no higher derivatives. Our mathematician friends tell
us that a second order differential equation for x has in general an infinite number of solutions,
which can be labeled by the values of x and ˙x at some given time. These conditions that specify
the solution are sometimes called the initial conditions, and this is certainly appropriate for the
physics applications we have in mind. Once we specify the initial conditions, the initial position
and velocity, the solution of the differential equation, which is the trajectory, is completely spec-
ified. This means that if the fundamental law is a second order differential equation, like (6), the
mathematics guarantees that assumption A is satisfied. Thus we have shown that F = ma implies
A. This is a good thing.
In general, I am not so interested in proofs in this course, at least not in the mathematical sense.
However, in the note, and in lecture if I have time, I will give a “physicst’s proof” that the solution
of a second order differential equation is specified by q and ˙q.
Here is a simple and probably very familiar example. Suppose that the force is constant,
F (x, ˙x, t) = F
0
= m a = m
d
2
dt
2
x = m ¨x (7)
The solution for x(t) can be written in terms of x and ˙x at t = 0 as
x(t) =
F
0
2m
t
2
+ ˙x(0) t + x(0) (8)
We will see one general way of getting this result later. But is easy to check that (6) is satisfied by
computing the second derivative.
˙x(t) =
F
0
m
t + ˙x(0) (9)
¨x(t) =
F
0
m
(10)
This shows that the t
2
term is right. You can check that the other terms in (8) are correct by setting
t = 0 in (8) and (9).
There is nothing special about t = 0. We could just as well write the solution in terms of the
position and velocity at some arbitrary time t
0
, as
x(t) =
F
0
2m
(t − t
0
)
2
+ ˙x(t
0
) (t − t
0
) + x(t
0
) (11)
A Implies F = ma
It is less obvious that the implication also goes the other way. At least for a single degree of
freedom, assumption A actually implies, under very mild assumptions, the existence of a second
order differential equation like Newton’s second law for the trajectories.
To see this, let us restate A in mathematics. Suppose that a system has one degree of freedom
so that the configuration of the system is given by the value of a single variable x (it won’t matter,
but it makes the language simpler to talk about only a single coordinate). Since A is the statement
that the trajectory is determined by x and ˙x at some given time, call the “given time” t
0
, then A
implies that we can write any possible trajectory x(t) as a function of four variables: t (of course);
the time t
0
at which we specify x and ˙x; and of the “initial” values x(t
0
) = x
0
and ˙x(t
0
) = v
0
. A
5