Georgi, Howard. Physics 16 - Mechanics and Special Relativity (англ.)
Подождите немного. Документ загружается.


Notice again how linearity is at work here. Linearity is what guarantees that a linear combination
of two possible trajectories is another possible trajectory. This is what allows us to write the most
general solution as a combination of the two complex exponential solutions times constants:
x(t) = c e
iωt
+ d e
−iωt
(33)
It is the fact that the initial conditions appear in this extremely simple way as the coefficients of
simple basis solutions that makes all of this work.
If you haven’t seen this before, and perhaps even if you have, this probably looks really strange.
And you might also be asking yourself, if this is equivalent to the familiar solution in terms of co-
sine and sine, what is the advantage of using these unfamiliar complex exponential. The right
answer, I think, is that once you get used to using complex exponentials, they will simplify your
life a lot. We will see this in a few minutes when we discuss damped oscillators, but the message
is really more general. We don’t have to use complex exponential. We can do everything using
cosines and sines, using a combination of trigonometry and algebra. But with complex exponen-
tials, all we need is algebra!
In fact, Euler’s formula is the connection between algebra and trigonometry! You can define
the trigonometric functions this way:
cos θ ≡
e
iθ
+ e
−iθ
2
(34)
sin θ ≡
e
iθ
− e
−iθ
2i
(35)
Now you can derive all trigonometric identities just using algebra, and you never have to do
trigonometry again.
Uniform circular motion
One very evocative way to think about these complex solutions is in what is called “the complex
plane.” Because a complex number has two real components, its real and its imaginary part, we
can think of a complex number as a real vector in a two dimensional space in which the real part
is the x component of a two dimensional vector and the imaginary part is the y component. This
two dimensional space is the complex plane. Euler’s formula, (29), tells us that the basis solution
e
iωt
has real part cos ωt and imaginary part sin ωt, so its counterpart in the complex plane is the
two dimensional vector, (cos ωt, sin ωt),
e
iωt
= cos ωt + i sin ωt → (cos ωt, sin ωt) (36)
But this is a unit vector an angle ωt from the x axis. Thus as t increases, e
iωt
executes uniform
circular motion in the complex plane. You can see this in the ANIMATION circular motion.exe
More generally, a complex number z = x + iy can be written equivalently as a positive number
R times a complex exponential e
iθ
. Note the connection of this with the relation between Cartesian
and Polar coordinates in the complex plane.
z = x + iy = R e
iθ
→ (x, y)
Cartesian
⇔ (R, θ)
Polar
(37)
5

R = |z| =
q
x
2
+ y
2
(38)
θ = arg(z) (39)
=
arctan(b/a) for a ≥ 0 ,
arctan(b/a) + π for a < 0 .
(40)
Harmonic oscillation for more degrees of freedom
Because our analysis of the harmonic oscillator is very general, relying only on the general princi-
ples of linearity and time translation symmetry, the result of (4)
z(t) = z(0) e
Ht
(4)
applies to any system satisfying these two principles. For example, it is not necessary to restrict
ourselves to a single degree of freedom. With more degrees of freedom, z(t) becomes a vector
with number of components equal to the number of degrees of freedom, as does z(0) in (4). Thus
(4) implies that there are special solutions in which all the components of z move in lockstep, with
the same angular frequency. Such a motion is called a “normal mode”. The same two steps suffice
to solve these more complicated problems, but now there are more basis solutions (because there
are more degrees of freedom) and each of the basis solutions describes a motion of ALL the parts
of the system.
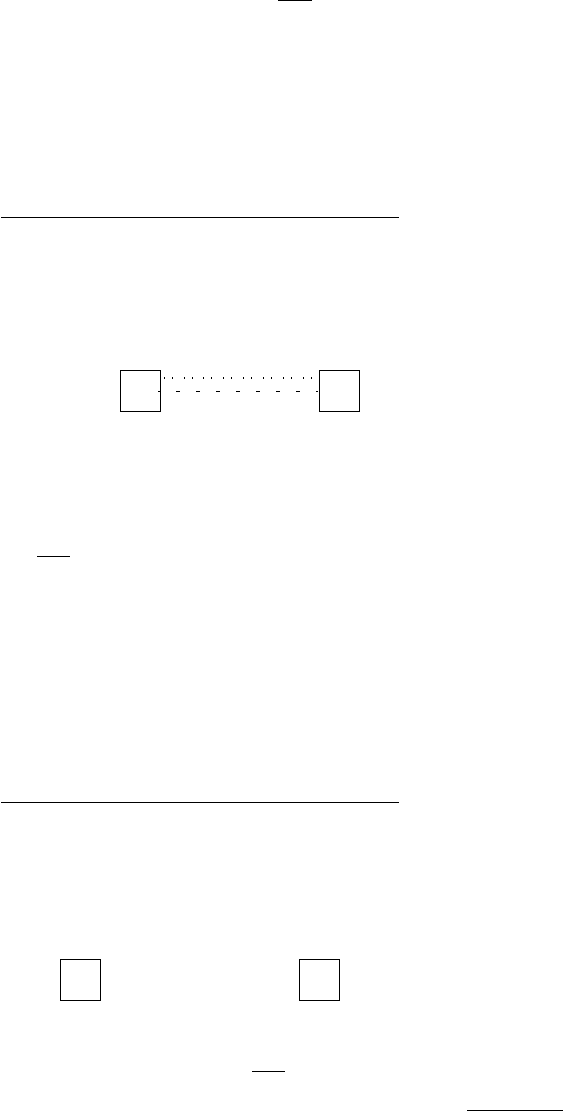
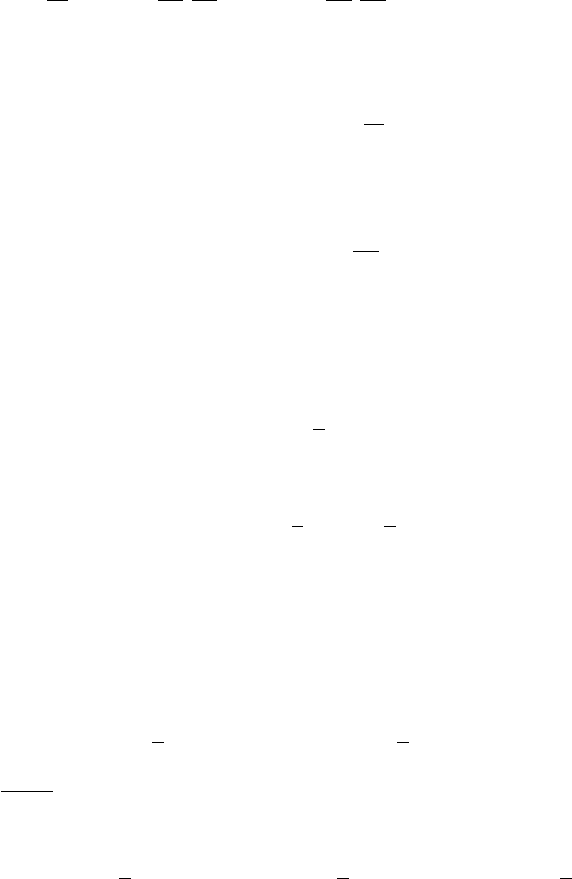
The double pendulum
Here is a very simple example of normal modes that I hope will make the idea clear. Consider the
double pendulum, which looks like this:
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1 2
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
ªªªªªªªª
¤¡ ¤¡ ¤¡ ¤¡ ¤¡ ¤¡ ¤¡ ¤¡
(41)
Two identical pendulums are constrained to move in the plane of the paper and coupled together
by a massless spring with spring constant K. In this case the configuration can be labeled by two
numbers, x
1
and x
2
the displacements of block 1 and block 2 from equilibrium. Thus this is a
system with two degrees of freedom. The vector q(t) that describes the configuration is just
q(t) =
µ
x
1
(t)
x
2
(t)
¶
(42)
6
Step 1 is now more complicated because we have to find the normal modes. Without the spring,
the two pendulums would oscillate independently. For small oscillation, the oscillation of a single
pendulum is harmonic with angular frequency ω =
q
g/`. The spring couples these motions
together. However, the normal modes are still harmonic. There are two basis solutions for each
normal mode.
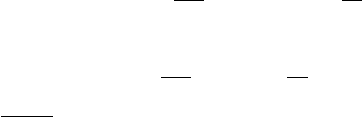
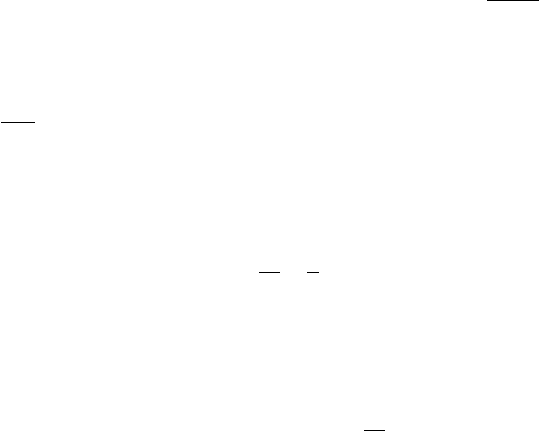
The normal modes look like this:
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1 2
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
ªªªªªªªª
¤¡ ¤¡ ¤¡ ¤¡ ¤¡ ¤¡ ¤¡ ¤¡
(43)
There is one normal mode in which the blocks move together. In this mode, the spring in the
middle is never stretched from its equilibrium length. The angular frequency of this mode is just
the same as the angular frequency of a single pendulum, which (for small oscillations for which
the system is linear) is ω
1
=
q
g/` where ` is the distance from the pivot to the mass. The basis
solutions that describe this normal mode are
z(t) =
µ
1
1
¶
e
iω
1
t
and z(t) =
µ
1
1
¶
e
−iω
1
t
(44)
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1 2
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
(45)
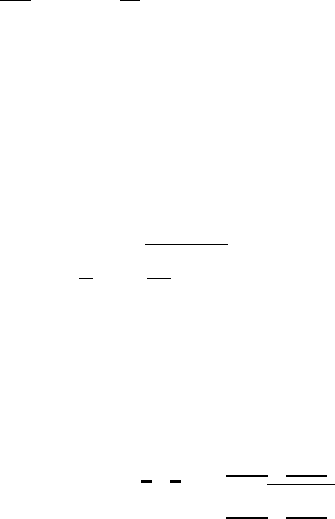
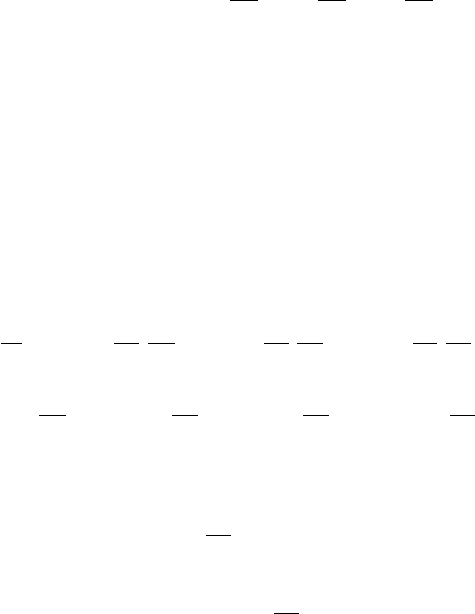
There is another normal mode in which the two pendulums move in precisely opposite directions.
The frequency of this mode is slightly higher than
q
g/`, because now the spring contributes to
the restoring force that produces the oscillation. In fact, in this case, ω
2
=
q
2K + g/`. The basis
solutions that describe this normal mode are
z(t) =
µ
1
−1
¶
e
iω
2
t
and z(t) =
µ
1
−1
¶
e
−iω
2
t
(46)
7
The thing about a normal mode is that the ratios of the displacements of all the parts of the
system are fixed throughout the motion. In the double pendulum, in the motion (43), x
1
(t)/x
2
(t) =
1 throughout the motion, while in (45), x
1
(t)/x
2
(t) = −1.
You should have read a bit more about these in Morin’s book. In general, it is not easy to find
normal modes. In a case like this, you can guess them just from the symmetry of the system. The
details of finding them in general involves heavy-duty linear algebra, and this can wait for Physics
15c. What I care about in this course is that you know what these things mean and how to use them
if someone tells you what they are.
The point is that step 2 is the same as before. The general solution is always obtained by taking
a general linear combination of the basis solutions:
µ
x
1
(t)
x
2
(t)
¶
= C
1
µ
1
1
¶
e
iω
1
t
+ D
1
µ
1
1
¶
e
−iω
1
t
+ C
2
µ
1
−1
¶
e
iω
2
t
+ D
2
µ
1
−1
¶
e
−iω
2
t
(47)
This is short-hand notation for two equations,
x
1
(t) = C
1
e
iω
1
t
+ D
1
e
−iω
1
t
+ C
2
e
iω
2
t
+ D
2
e
−iω
2
t
x
2
(t) = C
1
e
iω
1
t
+ D
1
e
−iω
1
t
− C
2
e
iω
2
t
− D
2
e
−iω
2
t
(48)
As usual, we can use Euler’s equation to rewrite this in terms of sines and cosines.
µ
x
1
(t)
x
2
(t)
¶
= A
1
µ
1
1
¶
cos ω
1
t + B
1
µ
1
1
¶
sin ω
1
t + A
2
µ
1
−1
¶
cos ω
2
t + B
2
µ
1
−1
¶
sin ω
2
t (49)
Again, this is short-hand notation for two equations,
x
1
(t) = A
1
cos ω
1
t + B
1
sin ω
1
t + A
2
cos ω
2
t + B
2
sin ω
2
t
x
2
(t) = A
1
cos ω
1
t + B
1
sin ω
1
t − A
2
cos ω
2
t − B
2
sin ω
2
t
(50)
The damped harmonic oscillator
Let’s add the linear friction we talked about earlier to our harmonic oscillator. With such a frictional
term, the equation of motion for the mass on a spring becomes
m
d
2
dt
2
x(t) = −mΓ
d
dt
x(t) − K x(t) (51)
d
2
dt
2
x(t) + Γ
d
dt
x(t) + ω
2
0
x(t) = 0 (52)
where ω
0
=
q
K/m. This still satisfies the conditions of time translation invariance and linearity.
Therefore we still expect the solutions to be an exponentials and we can still use our two steps to
construct the general solution.
Step 1 is the usual. Because of time translation invariance and linearity, we can look for expo-
nential basis solutions:
z(t) = e
Ht
(53)
8
d
2
dt
2
e
Ht
+ Γ
d
dt
e
Ht
+ ω
2
0
e
Ht
= 0 (54)
As usual, derivatives with respect to t just bring down factors of H, so we can convert this to an
algebraic equation:
(H
2
+ ΓH + ω
2
0
) e
Ht
= 0 (55)
Notice that everything has gone exactly the same way here as in our two previous example. Indeed
the only difference here is that the algebraic equation, (55), is a little more complicated that the
previous examples. We need to use the quadratic formula to find the two solutions:
H = −
Γ
2
±
s
Γ
2
4
− ω
2
0
≡ −Γ
±
(56)
where
Γ > 0 ⇒ Re H < 0 ⇒ Re Γ
±
> 0 (57)
z(t) oscillates if ω
2
0
> Γ
2
/4 and it just dies out if ω
2
< Γ
2
/4 —
z(t) ∝ e
−Γ
±
t
=
↓ with t
z }| {
e
−Γt/2
×
↓↑ if Γ/2>ω
0
z }| {
e
±t
√
Γ
2
/4−ω
2
0
| {z }
° if Γ/2<ω
0
(58)
Step 2 is also the usual one. The general solution is a linear combination of the simple expo-
nential basis solutions:
x(t) = b
+
e
−Γ
+
t
+ b
−
e
−Γ
−
t
(59)
where Γ
±
are defined in (56). The constants b
±
contain the information about the initial conditions,
just as in the undamped harmonic oscillator.
The nature of the trajectories described by (59) depends on the relative size of the two parame-
ters, Γ and ω
0
. If Γ/2 > ω
0
, the damping is large (this is called “overdamped”). In this case, both
Γ
+
and Γ
−
are real and positive, and the trajectory is a sum of decaying exponentials.
If Γ/2 < ω
0
, the damping is small (this is called “underdamped”). In this case, both Γ
+
and Γ
−
have a positive real part and an imaginary part (with opposites signs). In this case, the trajectory
oscillates (or circles in the complex plane), but also dies out with time exponentially in t — the
ANIMATION damped.exe shows the oscillating case.
There is a slightly peculiar special case between these two — if Γ/2 = ω
0
, the system is
“critically damped.” In this case, the general solution is
x(t) = (A + B t) e
−Γ t/2
(60)
It is useful to look at a couple of limits of (59) to make contact with things we have already
done.
In the limit ω
0
→ 0, the damped harmonic oscillator reduces to a system with the linear fric-
tional force, (7). This is automatically an overdamped situation, because there is no oscillation at
all. Indeed, in this case, (59) reduces to (15), as it must.
Similarly (though perhaps more obviously), in the limit Γ → 0, the damped harmonic oscillator
is underdamped and goes smoothly into the ordinary harmonic oscillator as the damping goes away.
9

lecture 4
Topics:
Where are we?
Conservation laws
Work and Energy and the second Law
Energy in the harmonic oscillator
Work and Energy in three dimensions
Examples of potentials in 3-dimensions
A particle on a frictionless track
Forced oscillation and resonance
Harmonic driving forces
Energy in the driven oscillator
Breaking the wine glass
Where are we?
We have now seen a number of examples of the use of F = ma. You should all be familiar at this
point with the techniques of determining the trajectory of a classical system that is picked out by a
given set of initial conditions.
We also discussed the beautiful and surprisingly general behavior of the harmonic oscillator,
and the particularly simple description of its motion that obtains when we allow our trajectories to
involve i =
√
−1.
Now, we will start the process of going beyond F = ma to more general and powerful ap-
proaches. This will occupy us for the next two weeks. This week, we will discuss two of the great
conservation laws of classical mechanics — energy and momentum.
I also have some organizational remarks. First, a bit of good news — we have now seen all
the ways of solving differential equations that we are going to use. There are really only two of
them. One is integrating, perhaps after moving things around a little bit to separate variables on
two sides of the equation before integrating. The other is hoping that the solution is an exponential,
plugging in and checking to see whether it works! Nothing more complicated is going to happen!
We will, however, do a little more multivariable calculus today. Please please please stop me and
ask questions if you see something you don’t understand.
Next, you should soon (I hope) find a Q&A question on the web page to be filled out by next
Monday. If you cannot access this, then either the system is not working or you are not on my list,
and you need to send me an email right away and check with the registrar.
Now to work (literally and figuratively)!
Conservation laws
It is somewhat unfortunate that “energy conservation” has come to mean two very different things.
When we read in a newspaper about energy conservation, the article is usually about using energy
carefully and not wasting it. What we mean in physics when we say energy conservation is some-
thing very different. We mean that there is a quantity called “energy” that is unchanged with time.
I suppose that there is some connection between these two meanings. If energy were not conserved
1
in the physics sense, if we could simply make new energy whenever we need it, then perhaps we
would not have to be so worried about using it sparingly and efficiently. It is the fact that energy is
conserved in the physics sense that makes it such an important quantity.
Today and next Tuesday, I will give some examples of the use of conservation of energy and
momentum. In the weeks that follow, we will address these conservations laws more systematically
and see where they come from at a deeper level. But before we can do that, we will have to learn
more about why classical mechanics looks the way it does. This will require that we reformulate
classical mechanics in a very beautiful way. And paradoxically, it will involve quantum mechanics
as well.
Work and Energy and the second Law
Let’s begin by considering a single degree of freedom. Write F = ma as
m
dv
dt
= F (1)
Multiplying both sides by v gives
v m
dv
dt
=
d
dt
µ
1
2
m v
2
¶
= F v ≡ P (2)
The kinetic energy of a particle of mass m is
1
2
m v
2
, thus the left hand side of (2) is the rate of
change of kinetic energy. The right hand side is the power, P, supplied by the force to the particle.
This is the differential form of the work-energy relation. The power supplied by the force acting on
a particle is the rate of change of the particle’s kinetic energy. This is always true whether there is
a conserved energy or not — it follows as you see just from F = ma. Integrating (2) with respect
to time gives the classic work-energy relation, that the change in kinetic energy equals the work
done by the force on the particle:
1
2
m v
2
2
−
1
2
m v
2
1
=
Z
t
2
t
1
dt
d
dt
µ
1
2
m v
2
¶
=
Z
t
2
t
1
dt P =
Z
t
2
t
1
dt v F =
Z
x
2
x
1
dx F (3)
The left hand side of (2) is a total time derivative. If the product F v is also a total time derivative,
then we can find a quantity that doesn’t change with time — its time derivative is zero. To see this,
call
F v = −
d
dt
U (4)
then (2) becomes
0 =
d
dt
µ
1
2
m v
2
¶
− F v =
d
dt
µ
1
2
m v
2
¶
+
d
dt
U =
d
dt
µ
1
2
m v
2
+ U
¶
(5)
Then quantity in parenthesis doesn’t change with time and we give it a name, energy,
E =
1
2
m v
2
+ U (6)
and we say that it is “conserved” because it doesn’t change with time.
2
A simple way in which (4) can happen is for F to be a function only of x. Then we can take U
in (4) to be
U(x) = −
Z
x
x
0
dx
0
F (x
0
) (7)
Physically, this makes sense because the integral in (7) keeps track of the work done by the force
in moving from x
0
to x. If this is negative, then to make the system move in this way, we would
have to do work against the force, and would get that energy back by letting the system move back
to x
0
. Mathematically this works because we can use the chain rule to write
d
dt
U(x) =
dx
dt
d
dx
U(x) = −
dx
dt
d
dx
Z
x
x
0
dx
0
F (x
0
) = −v F(x) (8)
So that v F is a total time derivative,
v F (x) = −
d
dt
U(x) (9)
In this case, as I’m sure you know, U(x) is called the potential energy, and the force is just minus
the derivative of U,
F (x) = −
d
dx
U(x) (10)
Energy in the harmonic oscillator
For the harmonic oscillator, the potential energy is
1
2
K x
2
(11)
and thus the conserved energy is
E =
1
2
m ˙x
2
+
1
2
K x
2
(12)
It is instructive to see how this works for a general solution of the form
x(t) = c cos(ω t − φ) (13)
Putting (13) into (12), we get the following for the energy:
E =
1
2
m ω
2
c
2
sin
2
(ωt − φ) +
1
2
K c
2
cos
2
(ωt − φ) (14)
Since ω =
q
K/m, this is
E =
1
2
K c
2
sin
2
(ωt − φ) +
1
2
K c
2
cos
2
(ωt − φ) =
1
2
K c
2
(15)
which is a constant, as we expected. But notice the way the mathematics manages to encode the
sloshing back and forth of energy between kinetic and potential.
3
Work and Energy in three dimensions
The concept of energy is much more useful and nontrivial for systems with more degrees of free-
dom. We will illustrate this by talking briefly about a single particle in three dimensions. In this
case, the configuration of the system is described by the position vector of particle, ~r, and the ve-
locity is also a vector, ~v =
˙
~r. Now things are more interesting. For example, energy conservation
can occur even if the force depends on the velocity, but on the other hand, not all forces that depend
only on ~r give rise to energy conservation.
I should mention before we begin that as far as energy conservation is concerned, there is
nothing special about three dimensions except that a particle in three dimensions has three degrees
of freedom. For any system with more than one degree of freedom, the issues are similar. But I
think it is useful to start with a particle in three dimensions because it is familiar, and because the
vector notation for ~r is a simple and commonly used notation for describing the configuration.
In three dimensions, Newton’s second law is a vector equation,
m~a = m
˙
~v =
~
F (16)
We will have much more to say later about what it means to say that something like (16) is a
vector equation. For now, we will simply say that a 3-dimensional vector is an object with three
independent components, and we will denote the component of ~r by (x, y, z) as you probably did
in high school, and the components of an arbitrary vector
~
A by (A
x
, A
y
, A
z
). A crucial concept
we will need is the “dot product” of two vectors:
~
A ·
~
B ≡ A
x
B
x
+ A
y
B
y
+ A
z
B
z
(17)
The dot product is important because it has the same value even if we change the components of
the individual vectors by rotating to another coordinate system. Here are a few of its most useful
properties:
The length of a vector
~
A is |
~
A | =
q
~
A ·
~
A (18)
~
A ·
~
B = |
~
A ||
~
B | cos θ
AB
where θ
AB
is the angle between the vectors (19)
1
|
~
A |
~
A ·
~
B = |
~
B | cos θ
AB
is the component of
~
B in the direction of
~
A (20)
Now let’s go back to (16). To get the time dependence of the kinetic energy, we take the dot
product of both sides with ~v,
m
˙
~v ·~v =
d
dt
µ
1
2
m ~v
2
¶
= ~v ·
~
F ≡ P (21)
Again, as with one degree of freedom, the time rate of change of the kinetic energy is equal to the
power, P = ~v ·
~
F , fed into the system by the force. There is a conserved energy if the power is a
total time derivative of a potential:
~v ·
~
F = −
d
dt
U (22)
The first thing to note is that it is not true, as it was with a single degree of freedom, that any
force that depends only on ~r automatically satisfies (22). To see what the constraints look like,
4
let’s notice that (22) implies that dU/dt must be the dot product of ~v with some vector. To see what
this vector is, we need an important result from multivariable calculus. The change in a function
of several variable can be written as a sum of the changes in the variables times the corresponding
partial derivatives:
df(a, b, c, ···) = da
∂f
∂a
+ db
∂f
∂b
+ dc
∂f
∂c
+ ··· (23)
The reason is not too hard to understand. To find the change in f due to a change in a with the
other variables held fixed, you would multiply the change in a by the derivative of f with respect
to a with the other variables held fixed (which is what the partial derivative means) to get the first
term in (23). Similarly, to find the change in f due to a change in b with the other variables held
fixed, you would multiply the change in b by the derivative of f with respect to b with the other
variables held fixed to get the second term in (23). And so on! Then the total change in f is just
the sum of all of these possible changes.
Now to see the connection of (23) with energy, we will suppose that U is a function of ~r, and
take the time derivative and use (23) divided by dt. This looks like
d
dt
U(~r ) =
dx
dt
∂
∂x
U(~r ) +
dy
dt
∂
∂y
U(~r ) +
dz
dt
∂
∂z
U(~r )
= ˙x
∂
∂x
U(~r ) + ˙y
∂
∂y
U(~r ) + ˙z
∂
∂z
U(~r ) = ~v ·
∂
∂ ~r
U(~r )
(24)
Thus we can satisfy (22) if the vector components of the force are related to the partial derivatives
of a single function —
~
F (~r ) = −
∂
∂ ~r
U(~r ) = −
~
∇ U(~r ) (25)
where
~
∇=
∂
∂ ~r
(26)
is the “gradient” or “grad” of “div, grad and curl.” We won’t make a lot of use of this. You
will do more in 15b. But the important point is that a force of this kind allows you to define a
conserved energy because the work done by the force in going from one point in space to another
is independent of the path — it just depends on the starting point and ending point. This is easy to
prove, but we won’t bother — you will see it later.
The second interesting thing about energy in three dimensions is that we can find velocity
dependent forces that still lead to a conserved energy. As long as the force is perpendicular to ~v,
~v ·
~
F is zero, and therefore it is the time derivative of zero, and (22) is satisfied. One important way
to do this to use the cross product (which we will discuss in more detail in a couple of weeks). A
force of the form
~
F = ~v ×
~
B (27)
automatically satisfies ~v ·
~
F = 0. This is the way magnetism works.
Examples of potentials in 3-dimensions
It is easy to go from a potential to the force. Equation (25) says that you just differentiate. In fact,
this step is so easy that we will often talk about finding the potential by running this backwards —
that is finding a U(x) such that (25) gives the force we want.
5