George W. Stimson introduction to Airborne Radar (Se)
Подождите немного. Документ загружается.

When the internally generated noise is considerably
greater than the external noise (as it is in the vast majority
of airborne radars in operation today), the noise figure, F
n
,
multiplied by the foregoing expression for mean noise
power per unit of gain for an ideal receiver is commonly
used to represent the level of background noise against
which target echoes must be detected.
Mean noise power = F
n
kT
0
B watts
(Actual receiver)
This expression, it should be remembered, includes both a
nominal estimate of the external noise (equivalent of the
noise generated in a resistor at room temperature) and the
accurately measured internally generated noise.
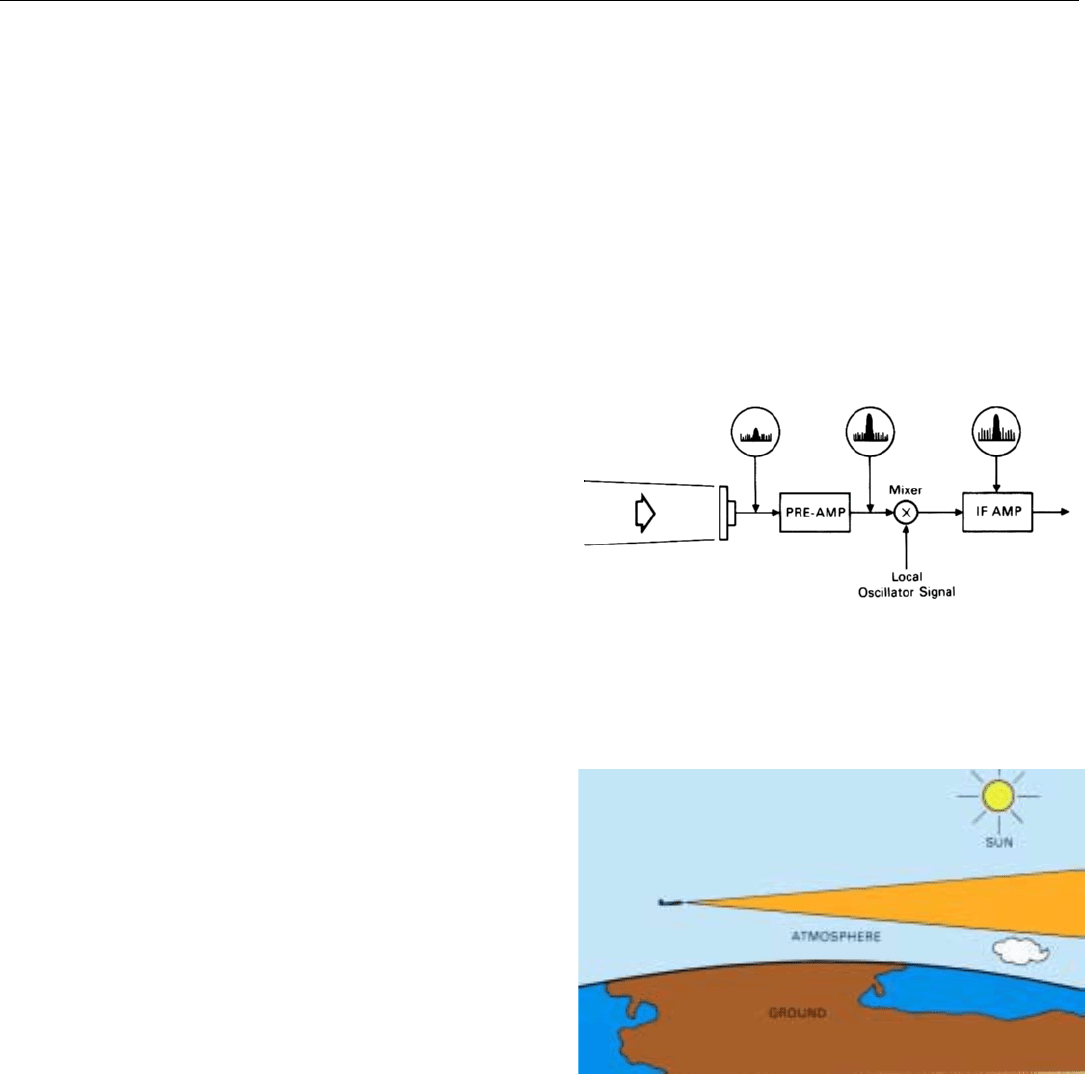
Although in many receivers, the internal noise predomi-
nates, it can be substantially reduced by adding a low-noise
preamplifier ahead of the receiver’s mixer stage and using a
low-noise mixer (Fig. 7). The preamplifier increases the sig-
nal strength relative to the thermal noise originating in the
subsequent stages, while contributing only a minimum
amount of noise itself. When a low-noise front end is used,
a more accurate estimate may have to be made of the noise
received from sources ahead of the receiver.
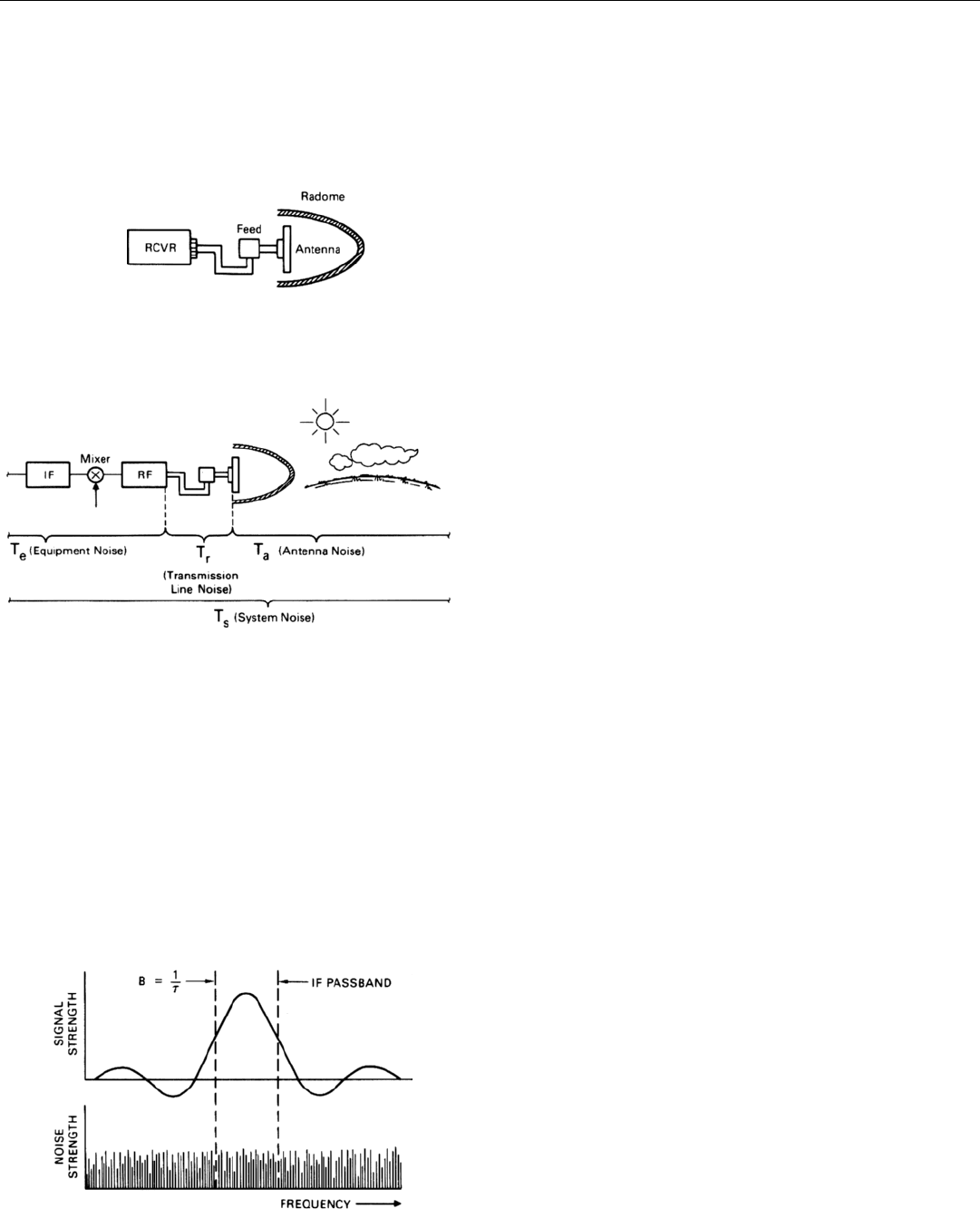
Noise from Sources Ahead of the Receiver. As explained
in Chap. 4, because of thermal agitation virtually every-
thing around us radiates radio waves. The radiation is
extremely weak. Nonetheless, it may be detected by a sensi-
tive receiver and add to the noise in the receiver output. At
the frequencies used by most airborne radars, the principal
sources of this natural radiation are the ground, the atmos-
phere, and the sun (Fig. 8).
Radiation from the ground depends not only upon the
temperature of the ground but on its “lossiness,” or absorp-
tion. (The power of the radiated noise is proportional to the
absolute temperature times the coefficient of absorption.)
Thus, although a body of water may have the same temper-
ature as a land mass, since water is a good conductor and
the land usually is not, the water will radiate comparatively
little noise. How much of the radiation that is received by
the radar varies widely with the gain of the antenna and the
direction in which it is looking. For example, far more
noise is received when looking down at the warm earth
than when looking off at a body of water which reflects the
extreme cold of outer space.
The amount of noise received from the atmosphere
depends not only upon the temperature and lossiness of
the atmosphere but upon the amount of atmosphere the
CHAPTER 10 Detection Range
119
7. Receiver noise may be reduced substantially by providing a
low-noise preamplifier ahead of the mixer and/or using a
low-noise mixer.
8. Principal sources of noise outside the aircraft. Amount
received varies with antenna gain and direction.
PART III Radar Fundamentals
120
antenna is looking through. Since the lossiness varies with
frequency, the received noise also depends upon the radar’s
operating frequency.
Noise received from the sun varies widely with both
solar conditions and the radar’s operating frequency.
Naturally, it is vastly greater if the sun happens to be in the
antenna’s mainlobe, as opposed to its sidelobes.
Within the aircraft carrying the radar, noise is radiated
by the radome, the antenna, and the complex of wave-
guides connecting the antenna to the receiver (Fig. 9).
Noise from these sources is likewise proportional to their
absolute temperature times their loss coefficients.
As previously noted, noise from all of these external
sources which falls within the receiver passband has essen-
tially the same spectral characteristics as receiver noise.
Consequently, when external noise is significant, the noise
from each source, as well as the receiver noise, is usually
assigned an equivalent noise temperature (Fig. 10). These
temperatures are combined to produce an equivalent noise
temperature for the entire system, T
s
. The expression for
noise power then becomes
Mean noise power = kT
s
B
(All sources)
Competing Noise Energy. Whether noise is expressed in
terms of receiver noise figure, F
n
T
0
, or equivalent noise
temperature, T
s
, it is noise energy, not power, with which a
target’s echoes must compete. As explained in the last chap-
ter, power is but the rate of flow of energy. Noise energy is
noise power times the length of time over which the noise
energy flows—in this case, the duration of the period in
which return may be received from any one resolvable
increment of range. Therefore,
Mean noise energy = kT
s
Bt
n
where t
n
is the duration of the noise.
For any given noise temperature and duration, the noise
can be reduced by minimizing the receiver bandwidth, B. A
common practice is to narrow the IF passband until it is
just wide enough to pass most of the energy contained in
the received echoes. This is called a matched filter design
(Fig. 11).
Another way of looking at this is that the tuned circuits
of the receiver IF amplifier integrate the received energy
during the width, τ, of each received pulse. They thus
9. Other sources of noise within the aircraft.
10. When external noise is significant, noise from each source is
assigned an equivalent noise temperature.
1
11. Signal-to-noise ratio may be maximized by narrowing the
passband of the IF amplifier to the point where only the bulk of
the signal energy is passed.
1. Since T
e
does not include the
noise of the input resistance,
as F
n
T
o
does, T
e
= T
o
(F
n
– 1).
accumulate the energy the pulse contains and reject the
noise outside the pulse’s bandwidth. The optimum band-
width turns out to be very nearly equal to one divided by
the pulse width, τ. When 1/τ is substituted for B in the
expression for mean noise, it becomes
Mean noise energy =
kT
s
t
n
τ
(Matched filter design)
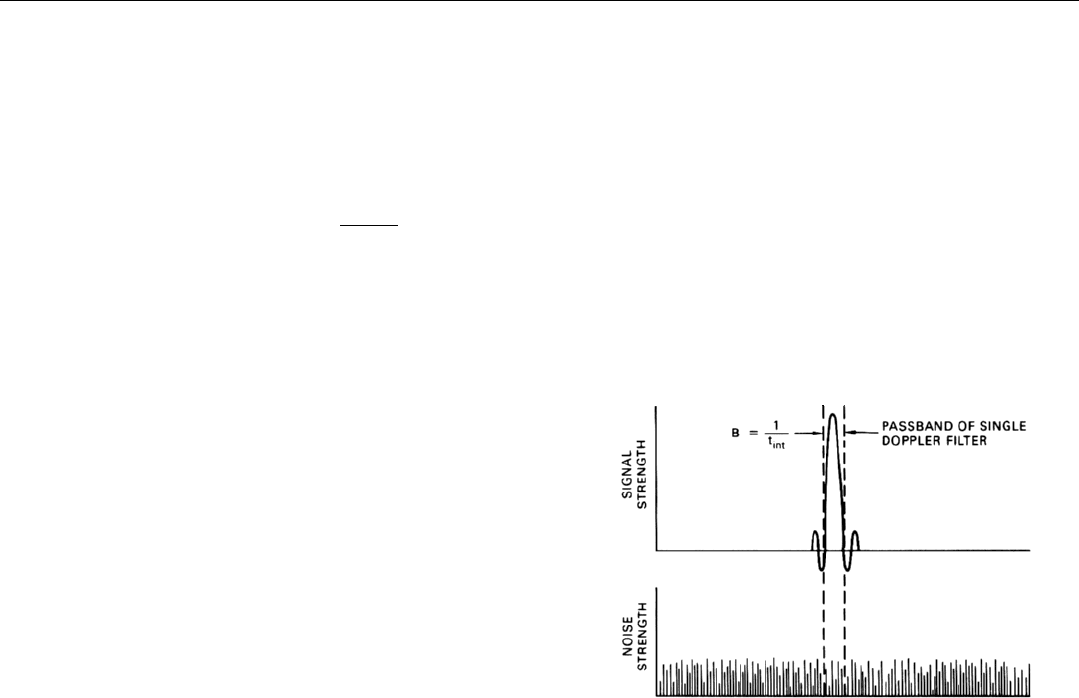
In doppler radars, bandwidth is further reduced by
doppler filters, which follow the IF amplifier. (A separate
filter is generally provided for every anticipated combina-
tion of resolvable range and doppler frequency.) As will be
explained in Chap. 18, the passband of a doppler filter is
approximately equal to 1/t
int
, where t
int
is the time over
which the filter adds up (integrates) the radar returns
(Fig. 12).
Whereas τ is on the order of microseconds, t
int
is on the
order of milliseconds. Consequently, the passband of a
doppler filter is on the order of 1/1000th of the width of
the IF passband.
The integration time, t
int
, is also the length of time over
which the noise is received and integrated by the filter.
When t
int
is substituted for t
n
and 1/t
int
is substituted for
1/ τ, the two terms cancel, leaving
Mean noise energy = kT
s
(Doppler radar)
One way of looking at the effect of a doppler filter on the
noise is this. As the noise energy flows into the filter, the fil-
ter’s passband (which is inversely proportional to integra-
tion time) simultaneously narrows. As a result, the level of
the noise energy that accumulates in the filter is more or
less independent of the length of the integration period.
Noise being random, of course, the level of the accumu-
lated energy may vary widely from one integration period
to another. But its mean value over a great many integration
periods will be kT
s
.
On average, therefore, for a target to be detected, enough
energy must be received from it to noticeably raise the filter
output above this mean level.
And that brings us to the question: what determines how
much energy is received from a target; what is the energy of
the signal?
CHAPTER 10 Detection Range
121
12. In a doppler radar the passband is further narrowed by
doppler filtering.
PART III Radar Fundamentals
122
Energy of the Target Signal
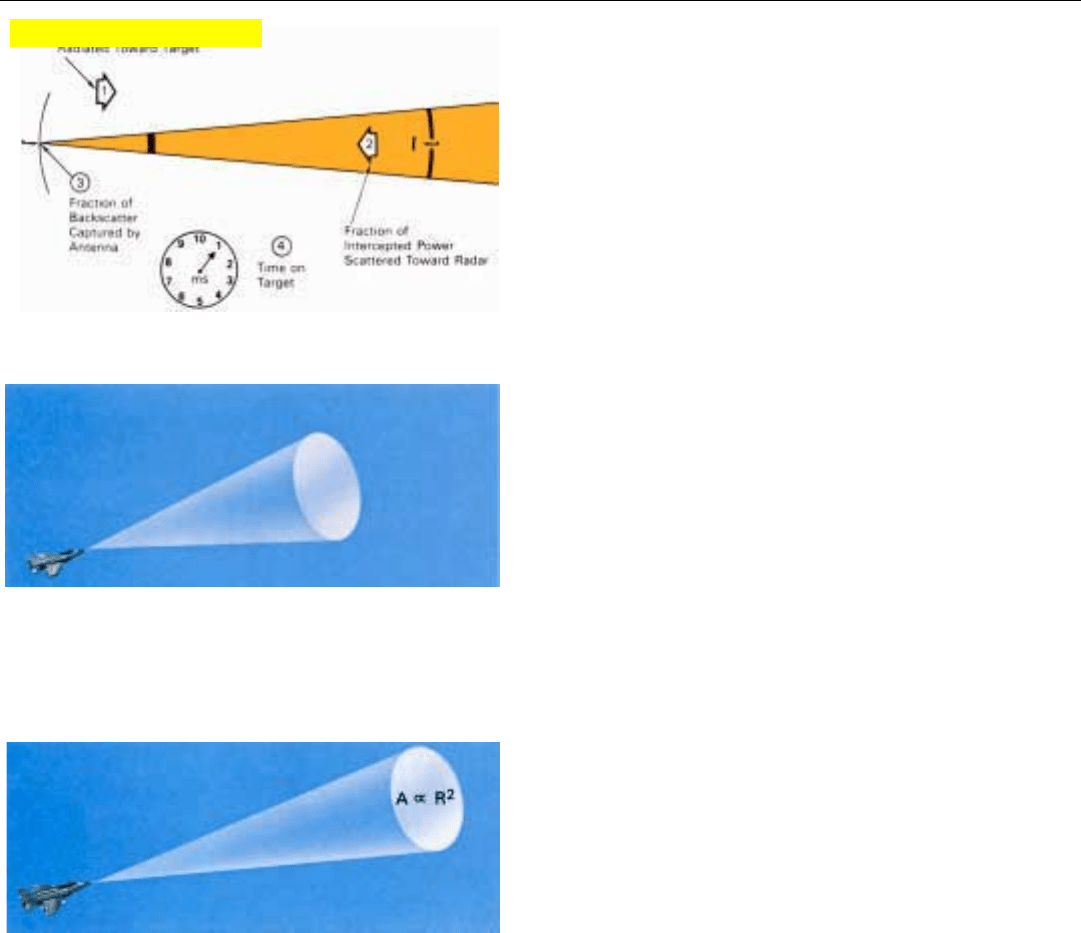
Four basic factors (Fig. 13) determine the amount of
energy a radar will receive from a target during any one
period of time that the antenna beam is trained on it:
• Average power—rate of flow of energy—of the radio
waves radiated in the target’s direction
• Fraction of the wave’s power which is intercepted by
the target and scattered back in the radar’s direction
• Fraction of that power which is captured by the radar
antenna
•
Length of time the antenna beam is trained on the target
When the antenna is trained on a target, the power den-
sity of the radio waves radiated in the target’s direction is
proportional to the transmitter’s average power output, P
avg
,
times the gain, G, of the antenna’s mainlobe (Fig. 14).
(Power density, you will recall, is the rate of flow of energy
per unit of area normal to the wave’s direction of propaga-
tion.)
2
In transit to the target, the power density is diminished
as a result of two things: absorption in the atmosphere, and
spreading. Except at the shorter wavelength, attenuation
due to absorption is comparatively small. For the moment it
will be neglected, but not the reduction in power density
due to spreading.
As the waves propagate toward the target, their energy
spreads—like the substance of an expanding soap bubble—
over an increasingly large area (Fig. 15). This area is propor-
tional to the square of the distance from the radar. At the
target’s range, say R miles, the power density is only 1/R
2
times what it was at a range of 1 mile.
The amount of power intercepted by the target equals the
power density at the target’s range times the geometric
cross-sectional area of the target, as viewed from the radar
(the projected area).
What fraction of the intercepted power is scattered back
toward the radar depends upon the target’s reflectivity and
directivity. The reflectivity is simply the ratio of total scat-
tered power to total intercepted power. The directivity—like
the gain of an antenna—is the ratio of the power scattered
in the direction of the radar to the power which would have
been scattered in that direction had the scattering been uni-
form in all directions.
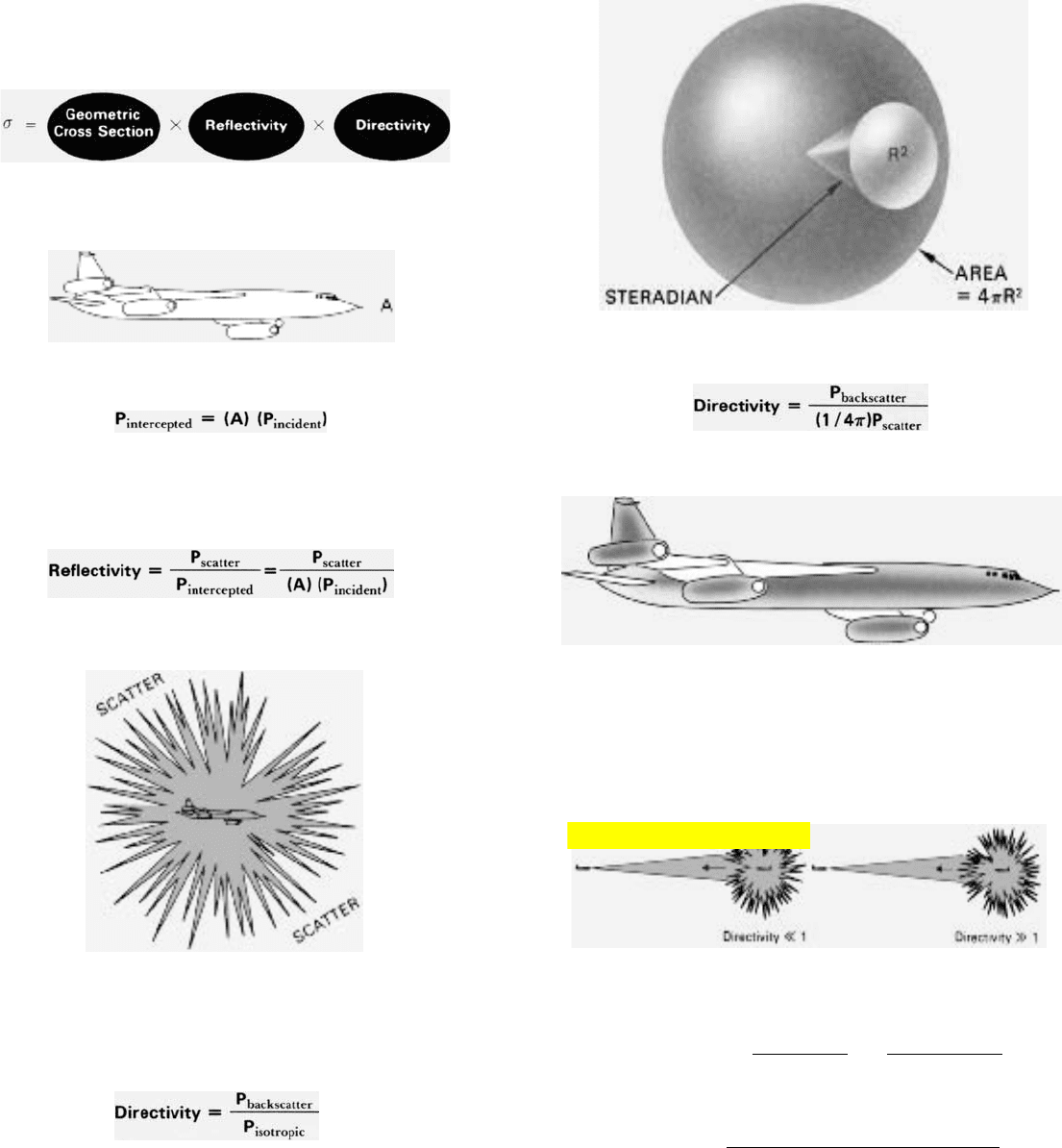
Customarily, a target’s geometric cross-sectional area,
reflectivity, and directivity are lumped into a single factor,
called radar cross section. It is represented by the Greek letter
sigma, σ, and is usually expressed in square meters. (See
panel on right.)
14. Density of power radiated in target’s direction is proportional
to the average radiated power times the antenna gain in that
direction.
15. As waves travel out to a target, their power is spread over an
increasingly large area.
2. Another term for power
density is “power flux.”
13. Factors which determine energy of target signal.
Power Density ∝ P
avg
G
Click for high-quality image
Since the area of a sphere is 4π times the radius squared, a
sphere contains 4π steradians. Therefore:
A target may be thought of as consisting of a great many indi-
vidual reflecting elements (scatterers).
The extent to which the scatter from these combines construc-
tively in the direction of the radar depends upon the relative
phases of the backscatter from the individual elements. That in
turn depends on the relative distances (in wavelengths) of the
elements from the radar. Depending on the configuration and
orientation of the target, the directivity may range anywhere
from a small fraction to a large number.
Complete Expression for
σ
. Expanded in terms of the factors
outlined in the preceding paragraphs, the basic expression for
radar cross section becomes:
Cancelling like terms and spelling out those that remain yields:
This is the common form of the definition of radar cross section.
It has the advantage of making radar equations easier to write.
But expressing
σ
in terms of geometric cross section, reflectivity,
and directivity is more illuminating since that shows the
relationship between
σ
and the factors that determine its value.
CHAPTER 10 Detection Range
123
σ
=
A ×
P
scatter
×
P
backscatter
(A) (
P
incident
) (1 / 4π) (
P
scatter
)
σ
=
4π
Backscatter per steradian
Power density of intercepted waves
RADAR CROSS SECTION
A target’s radar cross section,
σ
, is most easily visualized as
the product of three factors:
Geometric Cross Section is the cross-sectional area of the
larget as viewed from the radar.
This area determines how much power the target will intercept.
where P
incident
is the power density of the incident waves.
Reflectivity is the term for the fraction of the intercepted
power that is reradiated (scattered) by the target.
(The scattered power equals the intercepted power less
whatever power is absorbed by the target.)
Directivity is the ratio of the power scattered back in the
radar’s direction to the power that would have been
backscattered had the scattering been uniform in all directions,
i.e., isotropically.
Normally, P
backscatter
and P
isotropic
are expressed as power per
unit of solid angle. P
isotropic
then equals P
scatter
divided by the
number of units of solid angle in a sphere.
The unit of solid angle is the steradian. It is the angle
subtended by an area on the surface of a sphere equal to the
radius squared.
Click for high-quality image
PART III Radar Fundamentals
124
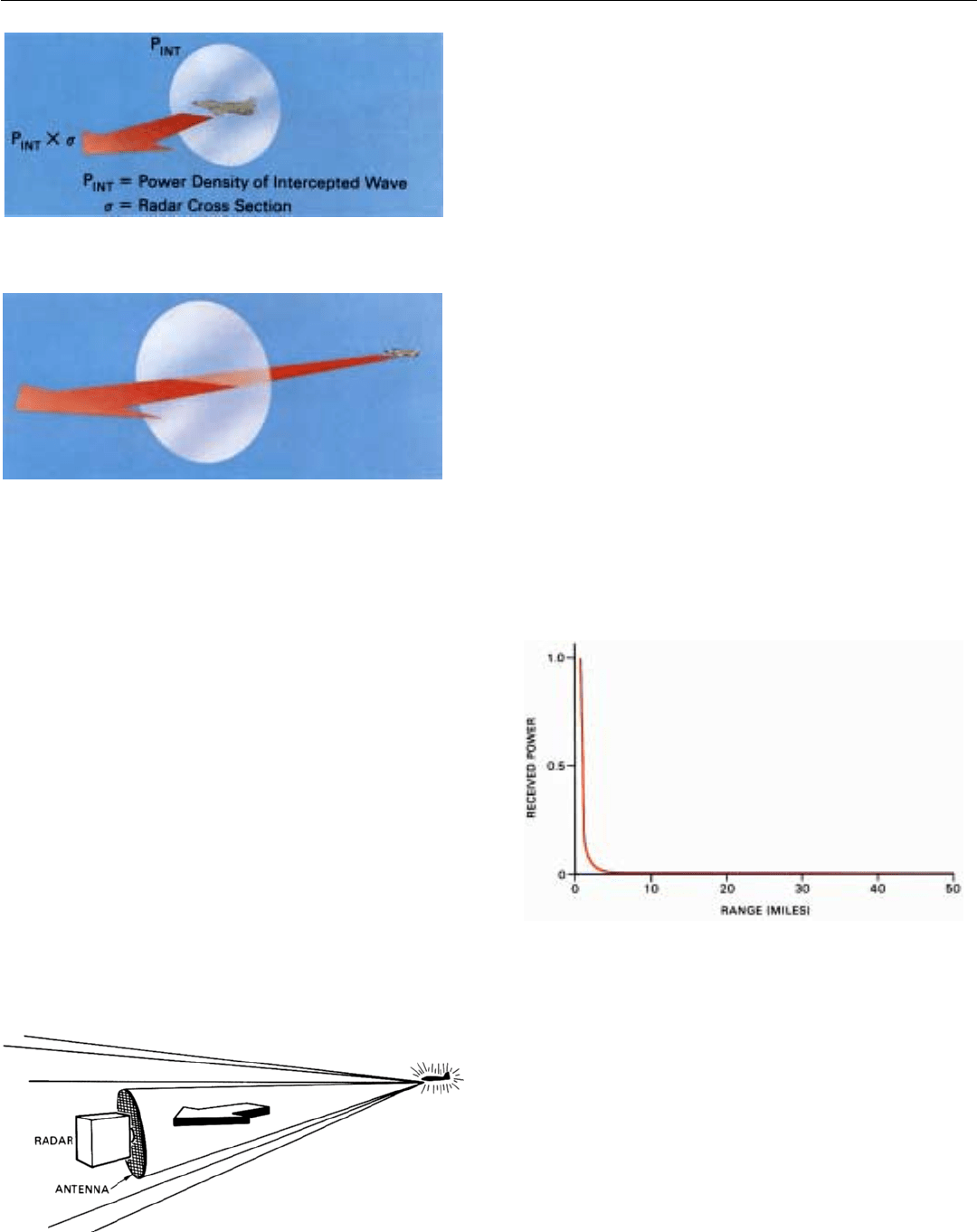
16. Density of power reflected in radar’s direction equals density
of intercepted wave times radar cross section.
17. Reflected power undergoes equal amount of spreading in
returning to radar.
The power density of the waves scattered back in the
radar’s direction, then, can be found by multiplying the
power density of the transmitted waves when they reach
the target by the target’s radar cross section (Fig. 16). Since
the directivity of a target can be quite high, for some target
aspects the radar cross section may be many times the geo-
metric cross-sectional area. For others, the reverse may be
true.
As the waves propagate back from the target, they under-
go the same geometrical spreading as on their way out.
Their power density, which has already been reduced by a
factor of 1/R
2
is again reduced by 1/R
2
(Fig. 17). The two
factors are compounded, so the power density when the
waves reach the radar is only 1/R
2
x 1/R
2
= 1/R
4
times what
it would be if the target were at a range of only 1 mile (or
whatever other unit of distance R is measure in).
To give you a feel for the magnitude of this difference,
the relative strengths of the echoes from the same target in
the same aspect at ranges of 1 to 50 miles are plotted
below (Fig. 18). For a range of 1 mile, the strength is arbi-
trarily assumed to equal 1. At 50 miles, the relative
strength is only 0.00000016—too small to be discernible
in the figure.
18. Reduction in strength of target echoes with range. Echoes from tar-
get at 50 miles are only 0.00000016 times as strong as echoes
from same target at 1 mile range.
19. Reflected power intercepted by radar is proportional to effec-
tive area of antenna.
Incidentally, Fig. 18 dramatically illustrates why the
receiver must be able to handle powers of vastly different
magnitudes—i.e., have a wide dynamic range.
When the backscattered waves reach the antenna, it
intercepts a fraction of their power. That fraction equals the
power density of the waves times the effective area of the
antenna, A
e
(Fig. 19). The total amount of energy intercept-
ed equals that product times the length of time the antenna
is trained on the target, t
ot
.
As we saw in Chap. 8, the area A
e
takes into account the
aperture efficiency of the antenna. For all of the intercepted
energy to be constructively added up by the antenna feed,
of course, the target must be centered in the antenna’s
mainlobe.
If we multiply together the several factors which we have
identified as governing the amount of energy received from
a target, we get the following expression for received target
signal energy.
Signal energy ≅ K
P
avg
GσA
e
t
ot
R
4
where
K = factor of proportionality (1/4π)
2
P
avg
= average transmitted power
G = antenna gain
σ = radar cross section of the target
A
e
= effective area of the antenna
t
ot
= time-on-target
R = range
This expression roughly indicates the total amount of
energy that would be received by a radar during the antenna
beam’s time-on-target, t
ot
. Whether all of the energy is actu-
ally utilized depends upon the radar’s ability to integrate it.
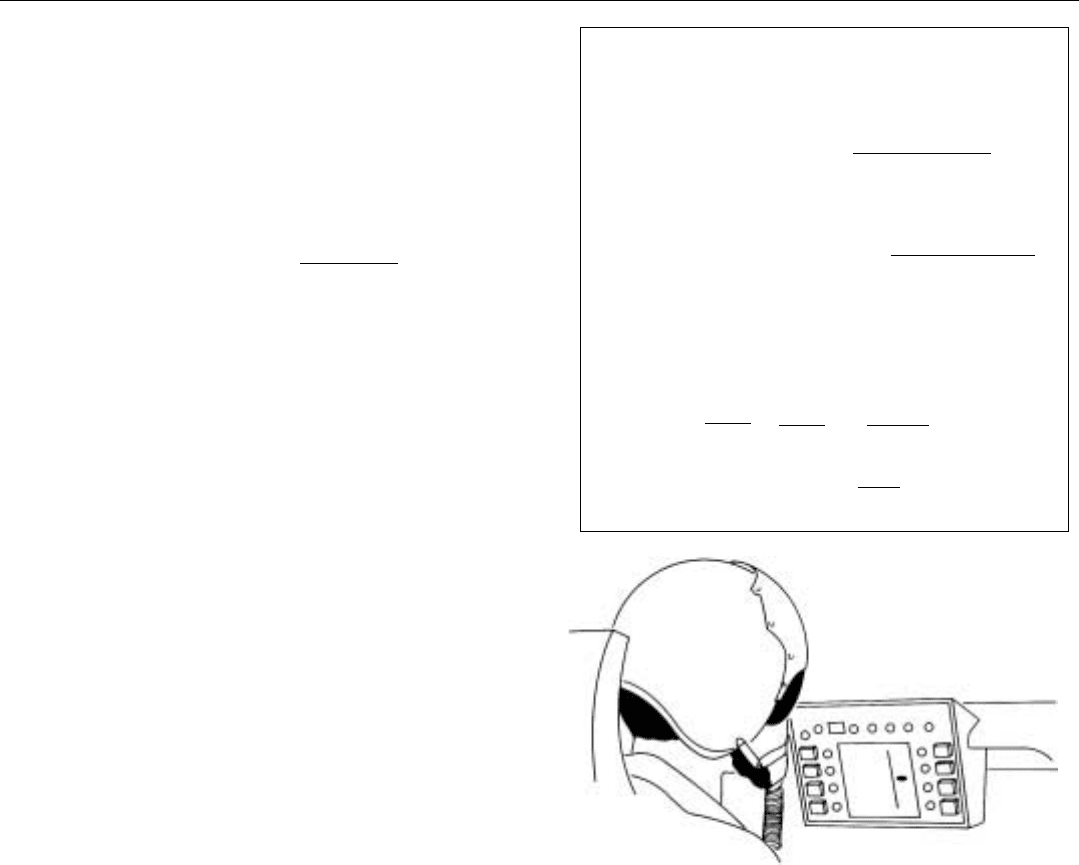
In simple non-doppler radars, integration is performed
by the display (e.g., by the phosphor that causes the image
to persist on the face of the CRT) and by the eyes and the
mind of the operator (Fig. 20). Because it takes place after
detection, this integration is called postdetection integration.
In a doppler radar, integration is performed primarily by
the signal processor’s doppler filters before detection takes
place. Provided the integration time, t
int
, is made equal to
t
ot
,
3
the above expression indicates the amplitude of the
integrated target signal in the output of a filter at the end of
each time-on-target. Whether the target will be detected, of
course, depends upon the ratio of this amplitude to that of
the integrated noise, discussed earlier.
To fully understand the relationship between signal-to-
noise ratio and maximum detection range, though, we must
know a little more about the actual detection process.
Detection Process
A small target, we will assume, is approaching a search-
ing doppler radar from a very great distance. Initially, the
target echoes are extremely weak—so weak they are com-
pletely lost in the background noise.
On first thought, one might suppose the echoes could be
pulled out of the noise by increasing the gain of the receiv-
er. But the receiver amplifies noise and echoes equally.
Increasing its gain in no way alters the situation.
CHAPTER 10 Detection Range
125
20. In non-doppler radars, integration takes place on the display
and in the eyes and mind of the operator.
3. And provided the target is
centered in the passband of
one of the filters and the time
on target coincides exactly
with an integration period.
If you're puzzled, the value of 4π
2
for K in the equation
for received signal energy, may be explained as follows:
Density of power
reaching target
= P
avg
G
Area of a sphere
of radius R
Density of power
returned to radar
= P
reflected
Directivity factor
included in σ
Area of a sphere
of radius R
Area of a sphere
of radius R
= 4
πR
2
Therefore: Both G and σ must be divided by 4πR
2
G σ Gσ
4πR
2
4πR
2
x=
(4π)
2
R
4
THE SCALE FACTOR K
Hence:
K =
(4π)
2
1
PART III Radar Fundamentals
126
Each time the antenna beam sweeps over the target, a
stream of pulses is received (Fig. 21). A doppler filter in the
radar’s signal processor adds up the energy contained in
this stream. The target signal in the output of the filter thus
corresponds fairly closely to the total amount of energy
received during the antenna beam’s time-on-target. This
energy is indistinguishably combined with the noise energy
that has accumulated in the filter during the same period.
As the target’s range decreases, the strength of the inte-
grated signal increases. The mean strength of the noise, on
the other hand, remains about the same. Eventually, the sig-
nal becomes strong enough to be detected above the noise
(Fig. 22).
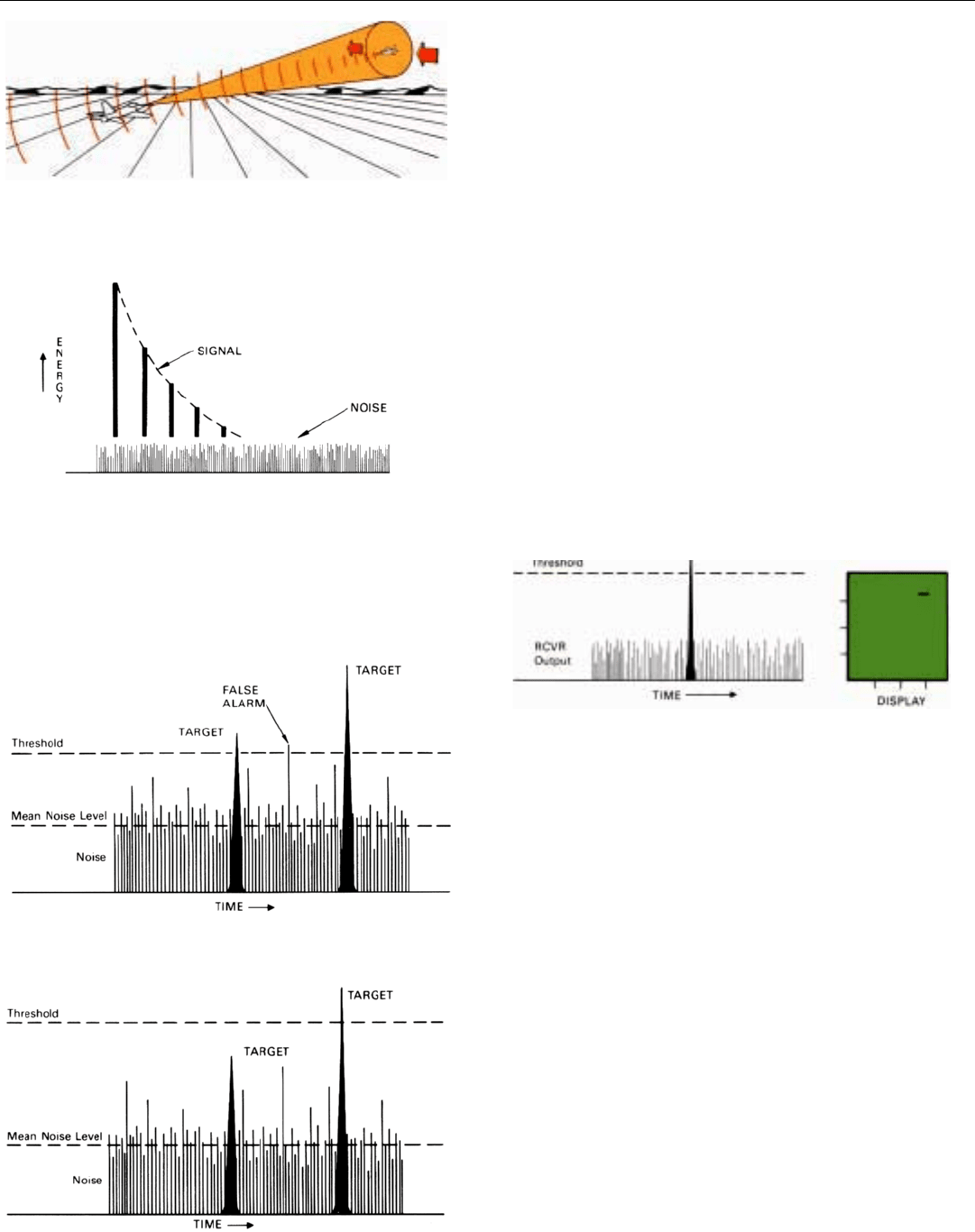
In doppler radars, detection is performed automatically.
At the end of every integration period, the output of each fil-
ter is applied to a separate detector. If the integrated signal
plus the accompanying noise exceeds a certain threshold,
the detector concludes that a target is present, and a bright,
synthetic target blip is presented on the display. Otherwise,
the display remains perfectly clear (Fig. 23).
23. If the receiver output exceeds the detection threshold, a bright, syn-
thetic blip appears on the display.
24. The higher the threshold is above the mean level of the noise,
the lower the probability of a spike of noise crossing it and
producing a false alarm.
25. Yet, if the threshold is too high, some detectable targets may
go undetected.
21. Each time the antenna beam sweeps across the target, a
stream of echoes is received.
22. Received signal energy, for successive times-on-target. As range
decreases, ratio of signal energy to noise energy increases.
The completely random noise alone will occasionally
exceed the threshold, and the detector will falsely indicate
that a target has been detected (Fig. 24). This is called a
false alarm. The chance of its occurring is called the false-
alarm probability. The higher the detection threshold rela-
tive to the mean level of the noise energy, the lower the
false-alarm probability will be, and vice versa.
Clearly the setting of the threshold is crucial. If it is too
high (Fig. 25), detectable targets may go undetected. If it is
too low, too many false alarms will occur. The optimum set-
ting is just enough higher than the mean level of the noise
to keep the false-alarm probability from exceeding an
acceptable value. The mean level of the noise, as well as the
system gain, may vary over a wide range. Consequently, the
output of the radar’s doppler filters must be continuously
monitored to maintain the optimum threshold setting.
Generally, the threshold for each detector is individually
set on the basis of both the probable noise level in the filter
whose output is being detected (the “local” noise level) and
the average noise level in all of the filters (the “global” noise
level). Typically, the local level is determined by averaging
the outputs of a group (ensemble) of filters on either side of
the one in question. Since most of these outputs will be due
to noise, the average can be assumed to approximate the
probable noise level in the bracketed filter.
The global noise level is determined by establishing a
second, noise-detection threshold for every filter. This
threshold is set far enough below the target-detection
threshold so that in aggregate vastly more threshold cross-
ings are made by noise spikes than by target echoes. By
continually counting these crossings and statistically adjust-
ing the count for the difference between the two thresholds,
the false-alarm rate for the entire system can be determined.
Exactly how the local ensemble of filters is selected and
how the average for the ensemble is weighted in compari-
son to the system false-alarm rate varies from system to sys-
tem and mode to mode. As nearly as possible, however, the
thresholds are set so as to maintain the false-alarm rate for
each detector at the optimum value. If the rate is too high,
the thresholds are raised; if it is too low, the thresholds are
lowered. For this reason, the automatic detectors are called
constant false-alarm-rate (CFAR) detectors.
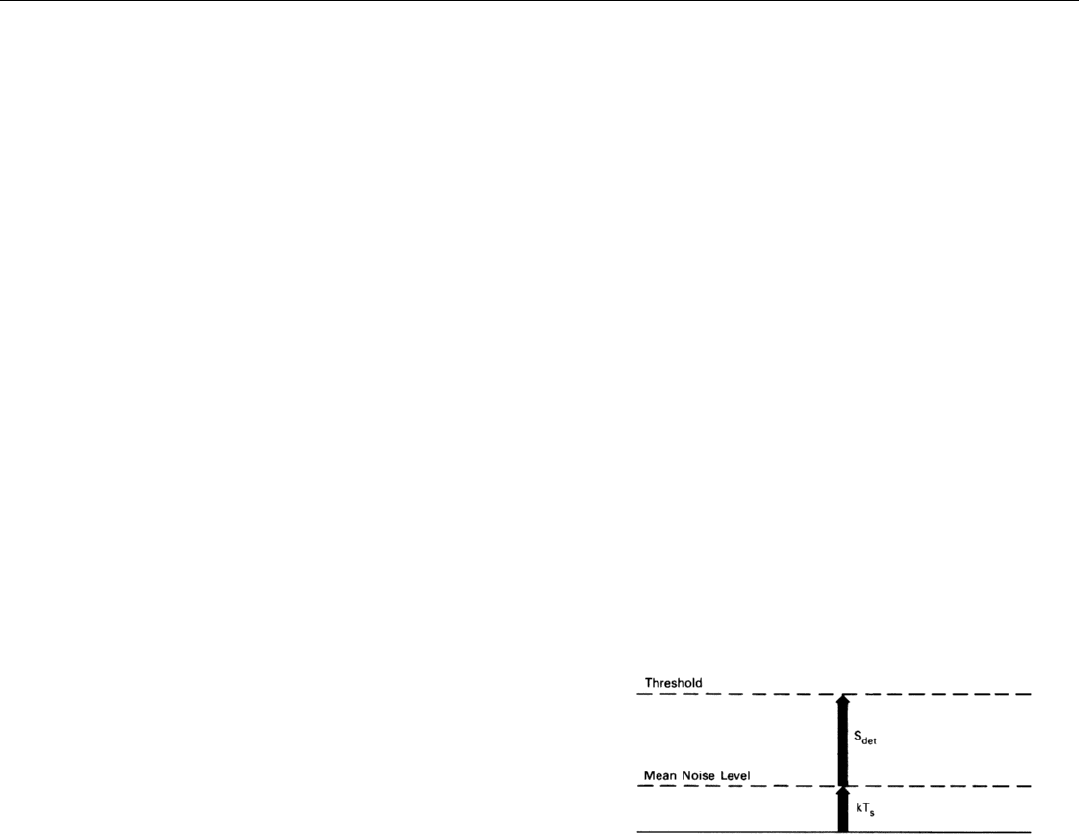
Regardless of how close to optimum it is, the setting of
the target detection threshold, relative to the mean level of
the noise, establishes the minimum value of integrated sig-
nal energy, s
det
, that, on average, is required for target detec-
tion (Fig. 26). Bear in mind, though, that because of the
randomness of the noise energy about its mean value, the
signal plus the accompanying noise will sometimes exceed
the threshold even when the signal energy is less than s
det
.
Likewise, at other times it will fail to reach the threshold,
even when the signal energy is greater than s
det
.
Nevertheless, the range at which a given target’s integrat-
ed signal becomes equal to s
det
can be considered to be the
maximum detection range (under the existing operating
conditions) for that particular target.
Integration and Its Leverage on Detection Range
Although implicit in the expression for signal energy
(page 125), the immense importance of integration in
pulling the weak echoes of distant targets out of noise is
often overlooked. One can gain a valuable insight into this
important process by performing a simple experiment.
Experimental Setup. To see how noise energy and signal
energy integrate in a narrow bandpass (doppler) filter we
set up a rudimentary radar to look for a test target at a
given range and angle. Having trained the antenna in the
CHAPTER 10 Detection Range
127
26. The setting of the threshold relative to the mean noise level
establishes the minimum value of integrated signal, S
det
,
required for detection.
PART III Radar Fundamentals
128
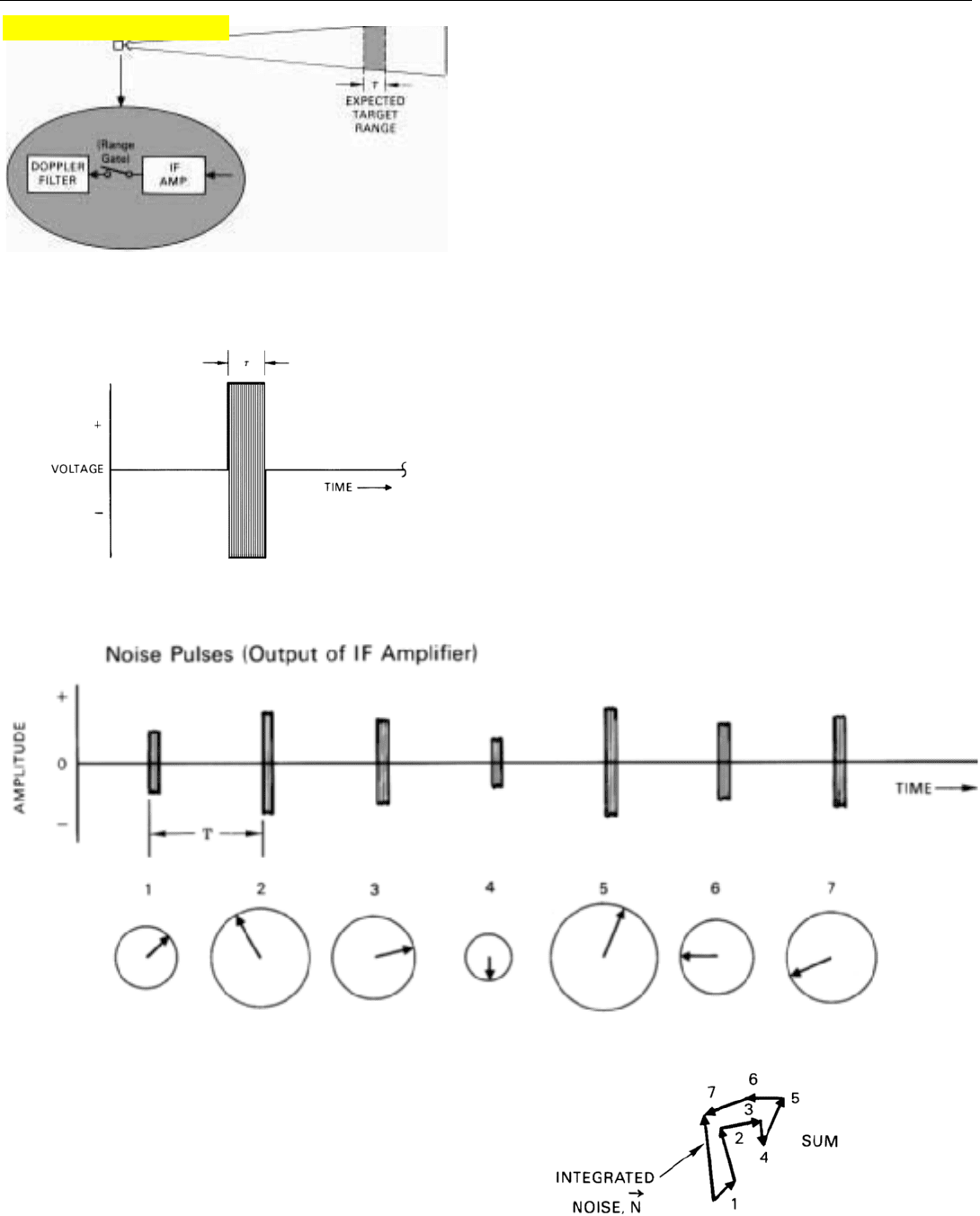
expected target’s direction, we turn on the receiver for a
fixed period of time. Meanwhile, at that point in each inter-
pulse period when return will be received from the expect-
ed target’s range, we momentarily close a switch (range
gate). It passes a slice of the receiver’s IF output—one
pulsewidth wide—to a narrowband filter (Fig. 27). The fil-
ter is tuned to the target’s doppler frequency.
Noise Alone, Single Integration Period. Initially, we per-
form the experiment with no target present. When the
range gate is closed, all the filter receives is a pulse of noise
energy.
In this radar, as in most, the passband of the receiver’s IF
amplifier is just wide enough to pass the bulk of the energy
in a target echo (matched filter design). Consequently, hav-
ing passed through the IF amplifier and been sliced into
narrow pulses, the noise looks much like target return (Fig.
28). The principal difference as seen by the doppler filter is
this. Whereas the phase of the pulses received from a target
is constant from pulse to pulse, the phase as well as the
amplitude of the noise pulses varies randomly from pulse to
pulse. We can see the variation in phase most clearly if we
represent the pulses with phasors (Fig. 29).
29. Phasor representation of noise pulses applied to doppler filter.
Because of phase variation, amplitude of integrated noise is only a fraction of
the sum of amplitudes of the individual pulses.
27. A rudimentary radar is set up to look for a target at a given
range. Switch closes at the point in the interpulse period when
return is received from the expected target’s range.
28. Having passed through the IF amplifier and been sliced very
thin, each noise pulse looks much like target return.
Click for high-quality image