George W. Stimson introduction to Airborne Radar (Se)
Подождите немного. Документ загружается.


151
Pulse Delay Ranging
1. Range is determined by measuring the time between
transmission of a pulse and reception of the target echo.
B
y far the most widely used method of range mea-
surement is pulse delay ranging. It is simple and
can be extremely accurate. But since there is no
direct way of telling for sure which transmitted
pulse a received echo belongs to, the measurements are, to
varying degrees, ambiguous.
In this chapter, we will look at pulse delay ranging more
closely—learn how target ranges are actually measured
and consider the nature of the ambiguities. We will see
how ambiguities may be avoided at low PRFs, and
resolved at higher PRFs. We will then consider ambiguities
of a secondary type, called “ghosts,” and see how these
may be eliminated. Finally, we will look briefly at how
range is measured during single-target tracking.
Basic Technique
When a radar’s transmission is pulsed, the range of a
target can be directly determined by measuring the time
between the transmission of each pulse and reception of
the echo from the target (Fig. 1). The round-trip time is
divided by two to obtain the time the pulse took to reach
the target. This time, multiplied by the speed of light, is
the target’s range. Expressed mathematically,
R =
ct
2
where
R = range
c = speed of light
t = round-trip transit time
Click for high-quality image
PART III Radar Fundamentals
152
A useful rule of thumb is 12.4 microseconds of round-trip
transit time equals 1 nautical mile of range (Fig. 2). If you
wish to calculate ranges more accurately, the speed of light
in various units of distance is given in Chap. 4.
Just how the range is actually measured varies with the
type of radar.
Simple Analog Radars. In early radars, as well as many
radars of today, range is measured right on the operator’s
display. This method is most graphically illustrated by the
simple A display of World War II. For it, the electron beam
of a cathode ray tube is repeatedly swept across the face of
the tube (Fig. 3). It starts a new sweep each time the radar
transmits a pulse, moves at a constant rate throughout the
interpulse period, and “flies” back to the starting point
again at the end of the period. Each sweep is called a range
sweep; the line traced by the beam is called the range trace.
When a target echo is received, it deflects the beam, caus-
ing a pip to appear on the range trace. The distance from
the start of the trace to the pip corresponds to the time
between transmission and reception, thus indicating the
target’s range.
Sophisticated Analog Radars. In these, range is mea-
sured in an analogous manner by applying the receiver out-
put to a bank of switching circuits, called range gates
(Fig. 4). The gates are opened sequentially at times corre-
sponding to successive resolvable increments of range: first,
Gate No. 1, then Gate No. 2, and so on. A target’s range is
determined by noting which gate, or adjacent pair of gates,
its echoes pass through.
Enough range gates are provided to cover either the
entire interpulse period or the portion of it corresponding
to the range interval of interest.
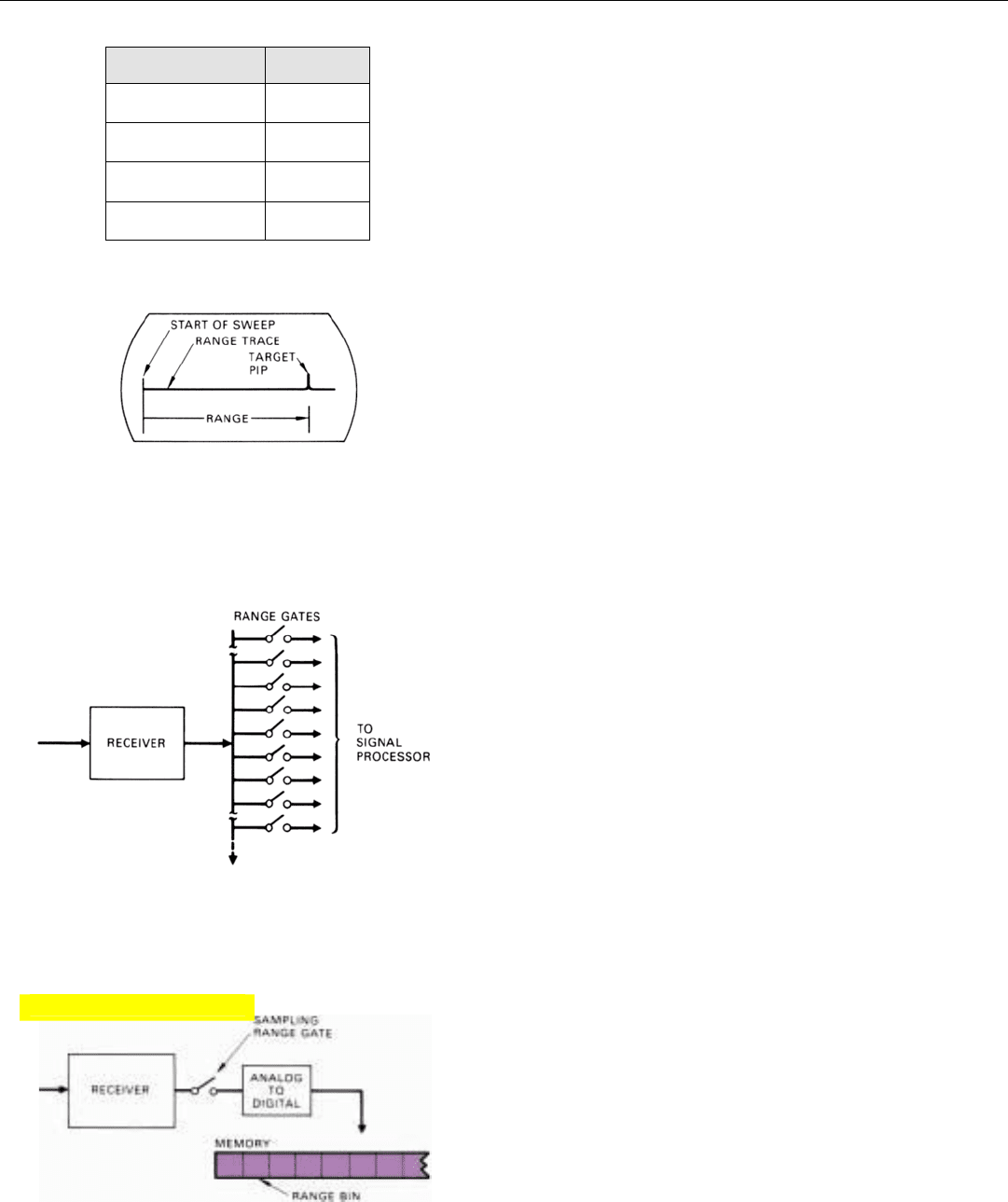
Digital Radars. When digital signal processing is
employed, range is essentially measured in the same way as
in range-gated analog radars. The amplitude of the receiv-
er’s video output is periodically sampled by a range gate
(Fig. 5). The samples are taken almost instantaneously.
Each is held until the next sample is taken. During this
interval, the amplitude of the sample is converted to a
number. The numbers are temporarily stored in an elec-
tronic memory in positions called range bins. A separate
bin is provided for each range increment within the interval
of interest.
As noted in Chap. 2, to enable doppler filtering after the
received signals have been converted to video, the receiver
must provide both in-phase (I) and quadrature (Q) outputs
(see page 28). Consequently, in digital doppler radars two
2. Rules of thumb for approximating round-trip ranging times.
3. In simple analog radars, range is measured on the operator’s
display. Shown here is an A display of a World War II radar.
4. In sophisticated analog radars, range gates are sequentially
opened (switch closed). Range is determined by noting which
gate a target’s echoes go through.
5. In digital radars, receiver output is periodically sampled by a
range gate. Converted to a number, each sample is stored in
a separate range bin.
APPROXIMATE RANGING TIME
Unit of Distance µs
1 nautical mile 12.4
1 statute mile 10.7
1 kilometer 6.67
1.5 kilometer 10.0
Click for high-quality image
numbers are stored for each range increment. Together,
they correspond to the return passed by a single range gate
in an analog system.
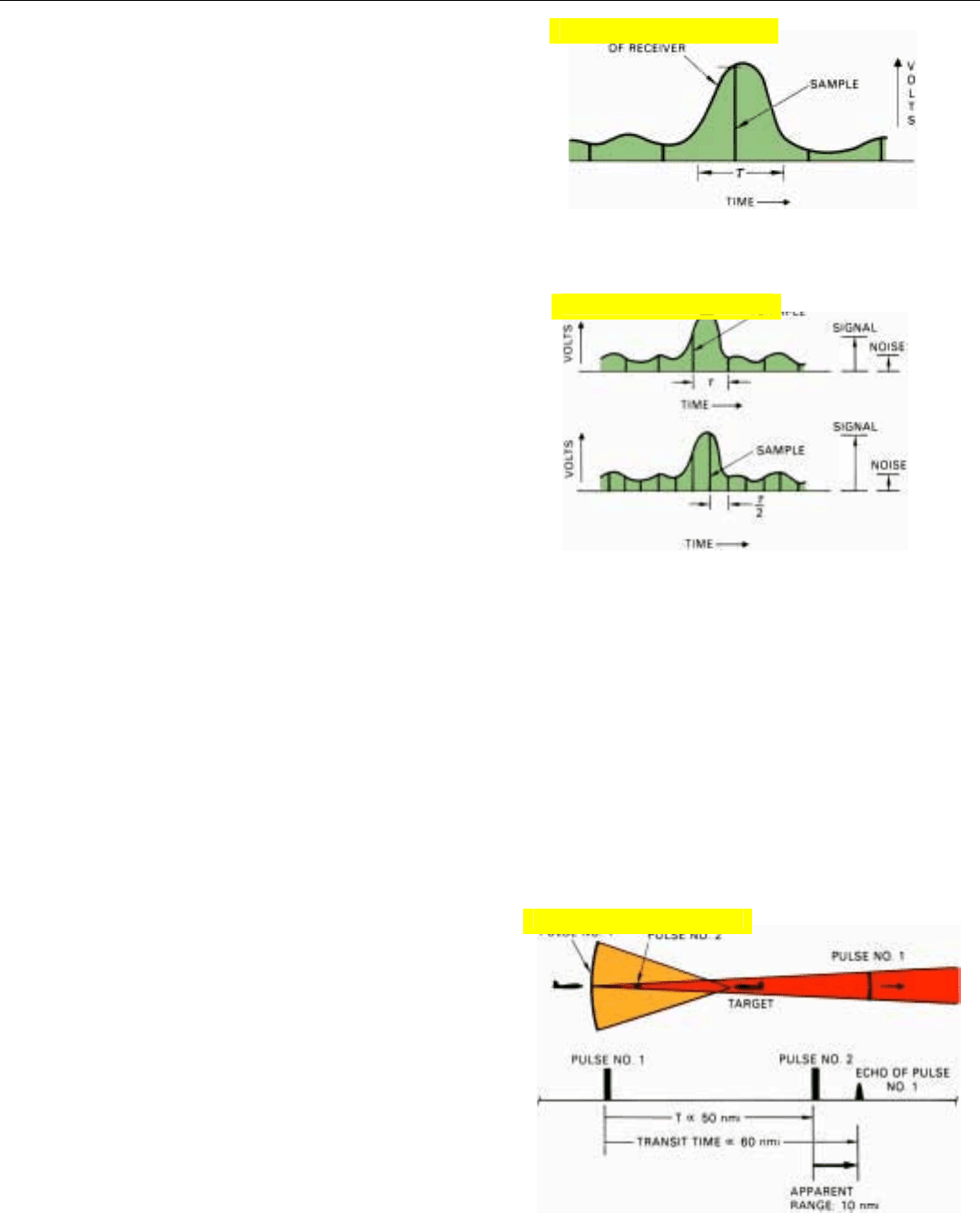
The choice of the sampling interval is generally a com-
promise. The larger the interval—i.e., the longer the time
between samples—the less complex the system will be
(Fig. 6). Yet, if the interval is greater than the duration
(width) of the transmitted pulses, some of the signal will be
lost when a target’s echoes fall between sampling points.
Moreover, the ability to resolve targets in range will be
degraded.
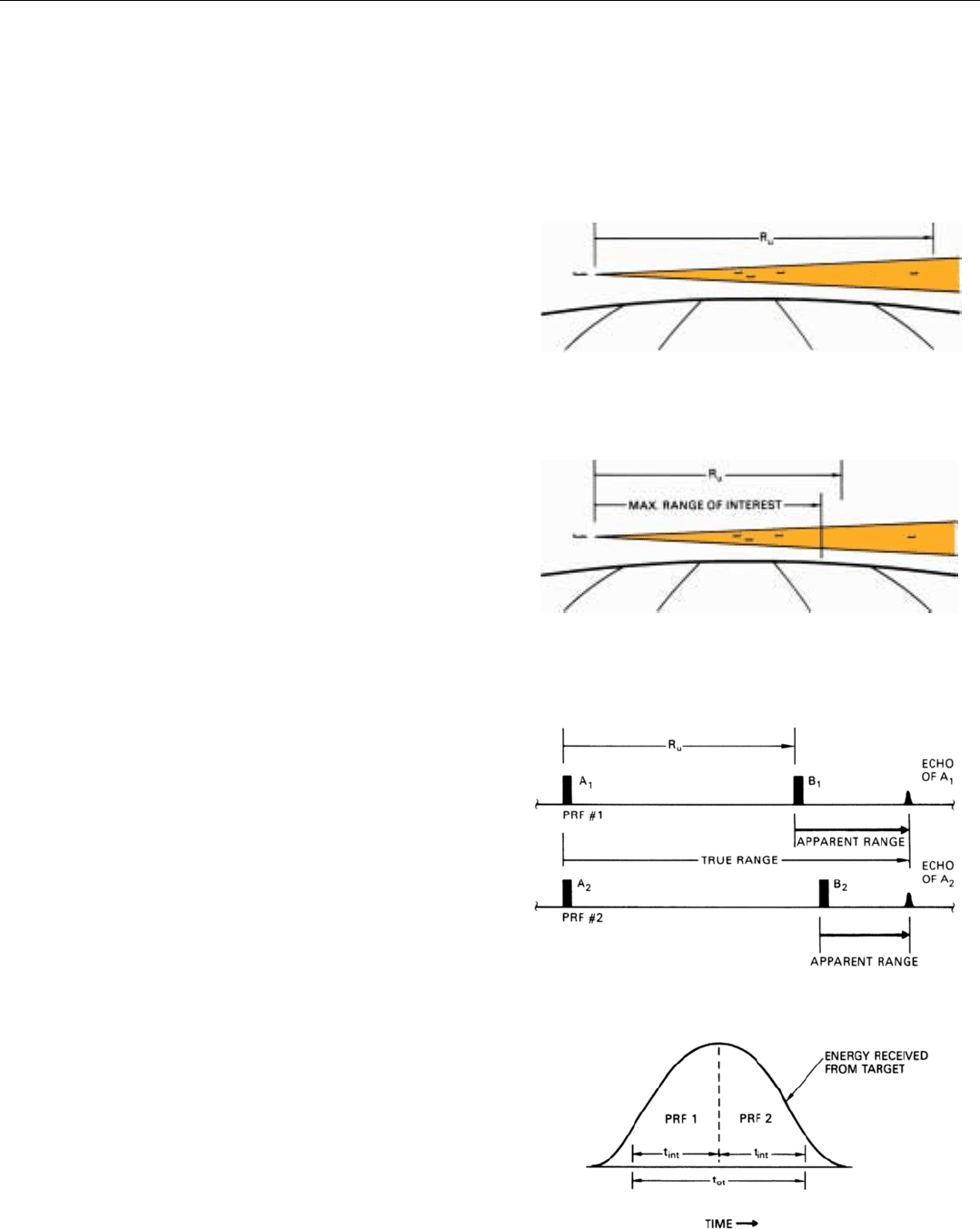
To realize the full range-resolving potential of the pulses,
as well as to enable more accurate range measurement,
samples may be taken at considerably shorter intervals than
the pulse width (Fig. 7). Range is then determined by inter-
polating between the numbers in adjacent range bins. If, for
example, the numbers in two adjacent bins are equal, the
target is assumed to be halfway between the ranges repre-
sented by the two bin positions. Depending on the sam-
pling rate and the pulse width, the measurement can be
quite precise.
1
Using a comparatively high sampling rate also minimizes
the loss in signal-to-noise ratio that occurs when a target’s
echoes fall partly in one sampling interval and partly in the
next. This is called range-gate straddling loss.
Range Ambiguities
Pulse delay ranging works without a hitch as long as
the round-trip transit time for the most distant target the
radar may detect is shorter than the interpulse period. But
if the radar detects a target whose transit time exceeds the
interpulse period, the echo of one pulse will be received
after the next pulse has been transmitted, and the target
will appear, falsely, to be at a much shorter range than it
actually is.
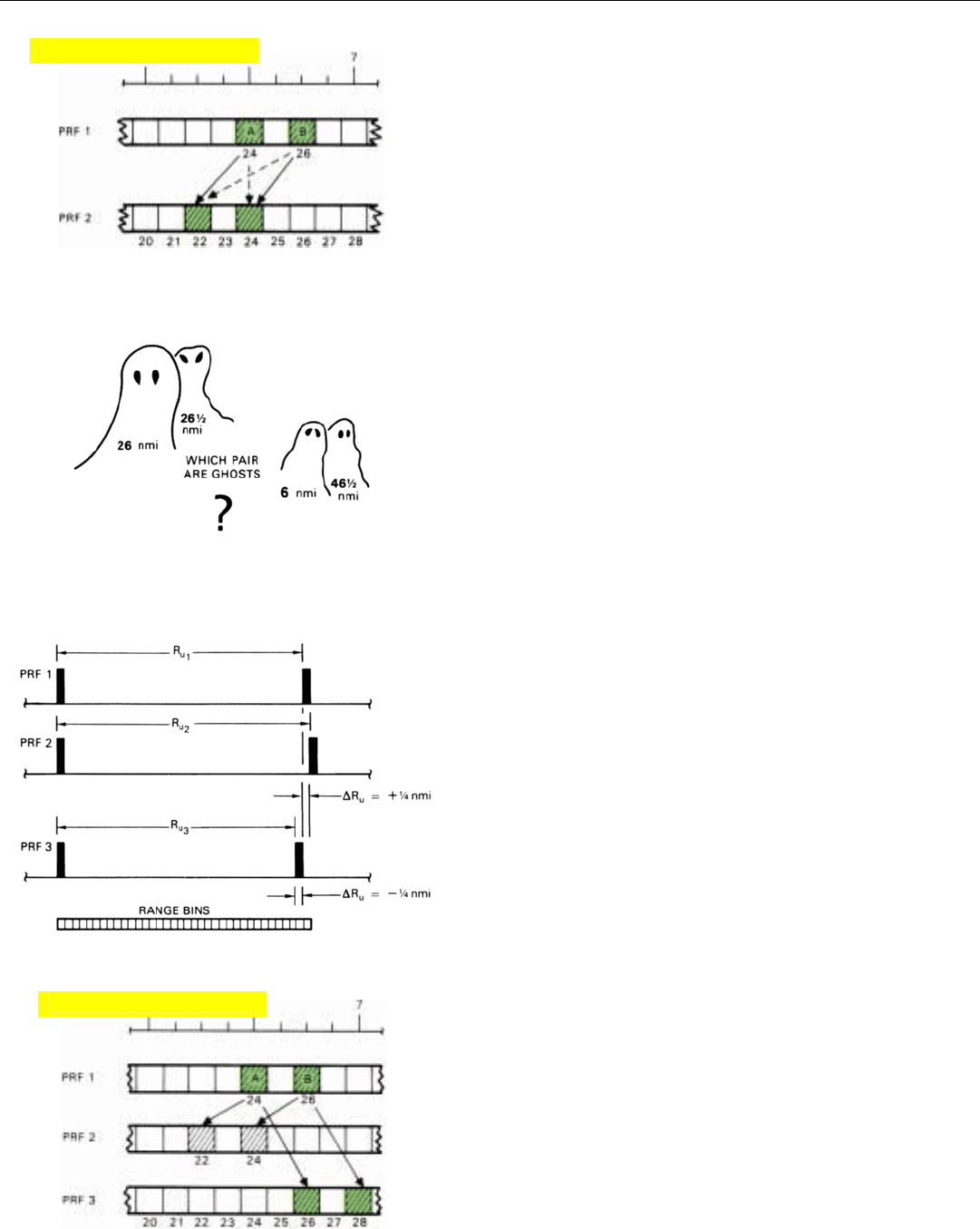
Nature of the Ambiguities. To get a more precise feel for
the nature of the ambiguities, let us consider a specific
example. Suppose the length of the interpulse period, T,
corresponds to a range of 50 nautical miles, and echoes are
received from a target at 60 miles (Fig. 8). The transit time
for this target will be 20 percent greater than the interpulse
period (60/50 = 1.2). Consequently, the echo of Pulse No. 1
will not be received until 0.2T microsecond after Pulse
No. 2 is transmitted. The echo of Pulse No. 2 will not be
received until 0.2T microsecond after Pulse No. 3 is trans-
mitted, and so on.
If the difference between the time an echo is received
and the time the immediately preceding pulse was transmit-
ted is used as the measure of range, the target will appear to
CHAPTER 12 Pulse Delay Ranging
153
6. Video signal is generally sampled at intervals on the order of
a pulse width, τ.
7. To enable more accurate measurement and minimize loss of
signal-to-noise ratio, samples may be taken at intervals shorter
than a pulse width; range is then computed by interpolating
between samples.
8. If interpulse period corresponds to 50 nautical miles and tran-
sit time to 60 nautical miles, range will appear to be only 10
nautical miles.
1. If pulse compression is used,
the intervals must be shorter
than the compressed pulse
width.
Click for high-quality image
Click for high-quality image
Click for high-quality image

PART III Radar Fundamentals
154
be at a range of only 10 miles (0.2 x 50). In fact, there will
be no direct way of telling whether the target’s true range is
10 miles, or 60 miles, or for that matter, 110 or 160 miles
(Fig. 9). In short, the observed range will be ambiguous.
Not only that, but as long as there is a possibility of
detecting targets at ranges greater than 50 nautical miles,
the observed ranges of all targets detected by the radar will
be ambiguous—even though their true ranges may be less
than 50 miles. Put another way, if the range indicated by
any target blip on the radar display can be greater than 50
miles, the range indicated by every target blip is ambiguous.
There is no telling which of the blips represents a target at
the greater range (Fig. 10). Therefore, range is almost
always ambiguous. This point is often overlooked.
The extent of the range ambiguities in the return from a
single target are commonly gauged by the number of inter-
pulse periods spanned by the transit time. That is, by
whether the target’s echoes are received during the first,
second, third, fourth, etc., interpulse period following
transmission of the pulses that produced them. An echo
received during the first interpulse period is called a single-
time-around echo. Echoes received during subsequent peri-
ods are called multiple-time-around echoes, or MTAEs.
Maximum Unambiguous Range. For a given PRF, the
longest range from which single-time-around echoes can be
received—hence the longest range from which any return
may be received without the observed ranges being
ambiguous—is called the maximum unambiguous range
(or simply unambiguous range). It is commonly represent-
ed by R
u
. Since the round-trip transit time for this range
equals the interpulse period,
R
u
=
cT
2
where
R
u
= maximum unambiguous range
c = speed of light
T = interpulse period
Since the interpulse period is equal to one divided by the
PRF (f
r
), an alternative expression is
R
u
=
c
2f
r
A useful rule of thumb is R
u
in nautical miles equals 80 divid-
ed by the PRF in kilohertz (Fig. 11). For a PRF of 10 kilo-
hertz, for example, R
u
would be 80 ÷ 10 = 8 nautical miles.
In metric units, R
u
equals 150 kilometers divided by the
PRF in kilohertz.
9. There is no direct way of telling whether true range is really
10 nautical miles, or 60 nautical miles, or 110 nautical miles,
or . . . .
10. The true range of any target appearing on this radar display
may
be greater than 50 nautical miles. Ergo, all ranges are
ambiguous.
11. Longest range from which unambiguous return may be
received, R
u
, corresponds to interpulse period, T.
Click for high-quality image
Strategy to Follow. What one does about range ambigui-
ties depends both upon their severity and on the penalty
that must be paid for mistaking a distant target for a target
at closer range. The severity, in turn, depends upon the
maximum range at which targets are apt to be detected and
on the PRF. Often, the PRF is determined by considerations
other than range measurement, such as providing adequate
doppler resolution for clutter rejection. The penalty for not
resolving an ambiguity, of course, depends upon the opera-
tional situation.
Obviously, the possibility of ambiguities could be elimi-
nated altogether by making the PRF low enough to place R
u
beyond the maximum range at which any target is apt to be
detected (Fig. 12). However, since targets of large radar
cross section may be detected at very great ranges, it may
well be impractical to set the PRF this low, even when a
comparatively low PRF is acceptable.
On the other hand, for the expected conditions of use,
the probability of detecting such large targets may be slight,
and the consequences of sometimes mistaking them for tar-
gets at closer range may be of no great importance.
Eliminating Ambiguous Return
If targets at greater ranges than R
u
are of no concern to
us, we can solve the problem of ambiguities simply by
rejecting all return from beyond R
u
(Fig. 13). This may
sound like a neat trick, but it can be accomplished quite
easily.
One technique is PRF jittering. It takes advantage of the
dependence of the apparent ranges of targets beyond R
u
on
the PRF.
Since the echoes received from these targets are not due
to the transmitted pulses that immediately precede them,
any change in PRF—hence in R
u
—will change the targets’
apparent ranges (Fig. 14). On the other hand, since the
echoes received from targets within R
u
are due to the pulses
that immediately precede them, changes in PRF will not
affect these targets’ apparent ranges.
Therefore, by transmitting at one and then the other of
two different PRFs on alternate integration periods, any tar-
gets at ranges greater than R
u
can be identified and rejected.
The ranges of all targets appearing on the display, then, will
be unambiguous.
Naturally, one pays a price for this improvement. As
explained in Chap. 10, the time-on-target is generally limit-
ed. Since it must be divided between the two PRFs, the
total potential integration time is cut in half (Fig. 15). This
reduces the maximum detection range.
CHAPTER 12 Pulse Delay Ranging
155
12. Ambiguities can be avoided completely only by making R
u
,
greater than the range at which
any
target may be detected.
13. If R
u
is greater than maximum range of interest, problem of
ambiguities can be solved by eliminating all return from
ranges greater than R
u
.
14. PRF jittering. If PRF is changed, apparent range of a target
beyond R
u
will change—identifying range as ambiguous.
15. The penalty for PRF jittering: potential integration time is cut in
half, reducing detection sensitivity.

18. A target appears in bin No. 24—apparent range, 6 nmi.
PART III Radar Fundamentals
156
Resolving Ambiguities
For reasons having nothing to do with ranging, the PRF
may have to be made so high that the maximum range of
interest is longer than R
u
—often many times so. The radar
must then be able to resolve range ambiguities.
Tagging Pulses. Superficially, it might seem that the easi-
est way to resolve the ambiguities would be to “tag” succes-
sive transmitted pulses (Fig. 16). That is, change (modu-
late) their amplitude, width, or frequency in some cyclical
pattern. By looking for corresponding changes in the target
echoes, one could then tell which transmitted pulse each
echo belongs to and thereby resolve the ambiguities.
But for one reason or another—problems of mechaniza-
tion, in the case of amplitude modulation; eclipsing
2
and
range gate straddling, in the case of pulse width modula-
tion—only one of these approaches has as yet proved prac-
tical: frequency modulation (see Chap. 8). For air-to-air
applications, even this approach has serious limitations.
PRF Switching. The resolution technique commonly
used is a simple extension of PRF jittering, called PRF
switching. It goes a step beyond jittering by taking account
of how much a target’s apparent range changes when the
PRF is changed. Knowing this and the amount the PRF has
changed, it is possible to determine the number of whole
times, n, that R
u
is contained in the target’s true range.
Determining n. How this is done is best illustrated by a
hypothetical example. We will assume that for other rea-
sons than ranging, a PRF of 8 kilohertz has been selected.
Consequently, the maximum unambiguous range, R
u
, is 80
÷ 8 = 10 nmi. However, the radar must detect targets out to
ranges of at least 48 miles—nearly 5 x R
u
—and undoubted-
ly it will detect some targets at ranges beyond that, as well.
The apparent ranges of all targets will, of course, lie
between 0 and 10 nautical miles (Fig. 17). To span this
10-mile interval, a bank of 40 range bins has been provid-
ed. Each bin position represents a range interval of
1
/4 mile
(10 miles ÷ 40 bins =
1
/4 mile per bin).
A target is detected in bin No. 24. The target’s apparent
range is 24 x
1
/4 = 6 miles (Fig. 18). On the basis of this
information alone, we know only that the target could be at
any one of the following ranges:
6 nmi
10 + 6 = 16 nmi
10 + 10 + 6 = 26 nmi
10 + 10 + 10 + 6 = 36 nmi
10 + 10 + 10 +10 + 6 = 46 nmi
10 + 10 + 10 + 10 + 10 + 6 = 56 nmi
16. By tagging transmitted pulses, we can tell which pulse each
echo belongs to. But except for frequency modulation, tagging
has proved impractical.
17. To span 10 nautical miles ranging interval, a bank of 40
range bins is provided. Each represents a range increment of
1
/4 nmi.
2. Echoes being received in part
or in whole when the radar is
transmitting and the receiver
is blanked.
Click for high-quality image
Click for high-quality image

General Relationships. From the foregoing, we can draw
the following conclusions. The number of whole times, n,
that R
u
is contained in a target’s true range equals the
change in apparent range when the PRF is switched, divid-
ed by the change in R
u
for the two PRFs.
n =
∆R
apparent
∆R
u
The true range is n times R
u
plus the apparent range.
R
true
= nR
u
+ R
apparent
Eliminating Ghosts
When PRF switching is used, a secondary sort of ambi-
guity, called ghosting, is sometimes encountered. It may
occur when two targets are detected simultaneously—i.e., at
the same azimuth and elevation angles—and their range
rates are so nearly equal that their echoes cannot be separat-
ed on the basis of doppler frequency (Fig. 22). Under this
condition, when the PRF is switched and one or both tar-
gets move to different range bins, we may not be able to tell
To determine which of these is the true range, we switch
to a second PRF. To keep the explanation simple, we will
assume that this PRF is just enough lower than the first to
make R
u
1
/4 mile longer than it was before (Fig. 19).
What happens to the target’s apparent range when the
PRF is switched will depend upon what the target’s true
range is. If the true range is 6 miles, the switch will not affect
the apparent range. The target will remain in bin No. 24.
But if the true range is greater than R
u
, for every whole
time R
u
is contained in the target’s true range, the apparent
range will decrease by
1
/4 mile: the target will move one bin
position to the left in Fig. 20. For the PRFs used here, n
equals the number of bins the target shifts.
Computing the Range. We can find the true range, there-
fore, by (1) counting the number of bin positions the target
moves, (2) multiplying this number by R
u
, and (3) adding
the result to the apparent range.
Suppose the target moves from bin No. 24 (apparent
range, 6 miles) to bin No. 21, a jump of three bins (Fig. 21).
The target’s true range, then, is (3 x 10) + 6 = 36 miles.
CHAPTER 12 Pulse Delay Ranging
157
19. PRF is changed to increase R
u
by
1
/4 nmi.
3
20. For every whole time R
u
is contained in true range, apparent
range will decrease
1
/4 nmi when the PRF is switched.
21. If target jumps 3 bins, true range is (3 x 10) + 6 = 36 nmi.
22. If more than one target is detected at the same angle and the
targets are not resolvable in doppler frequency, a problem of
ghosts will occur.
3. A practical system would not
be mechanized with PRFs so
closely spaced. The principle,
though, is the same.
Click for high-quality image
Click for high-quality image
PART III Radar Fundamentals
158
which target has moved to which bin. Each target will
appear to have two possible ranges. One is the true range;
the other, in radar jargon, is a ghost.
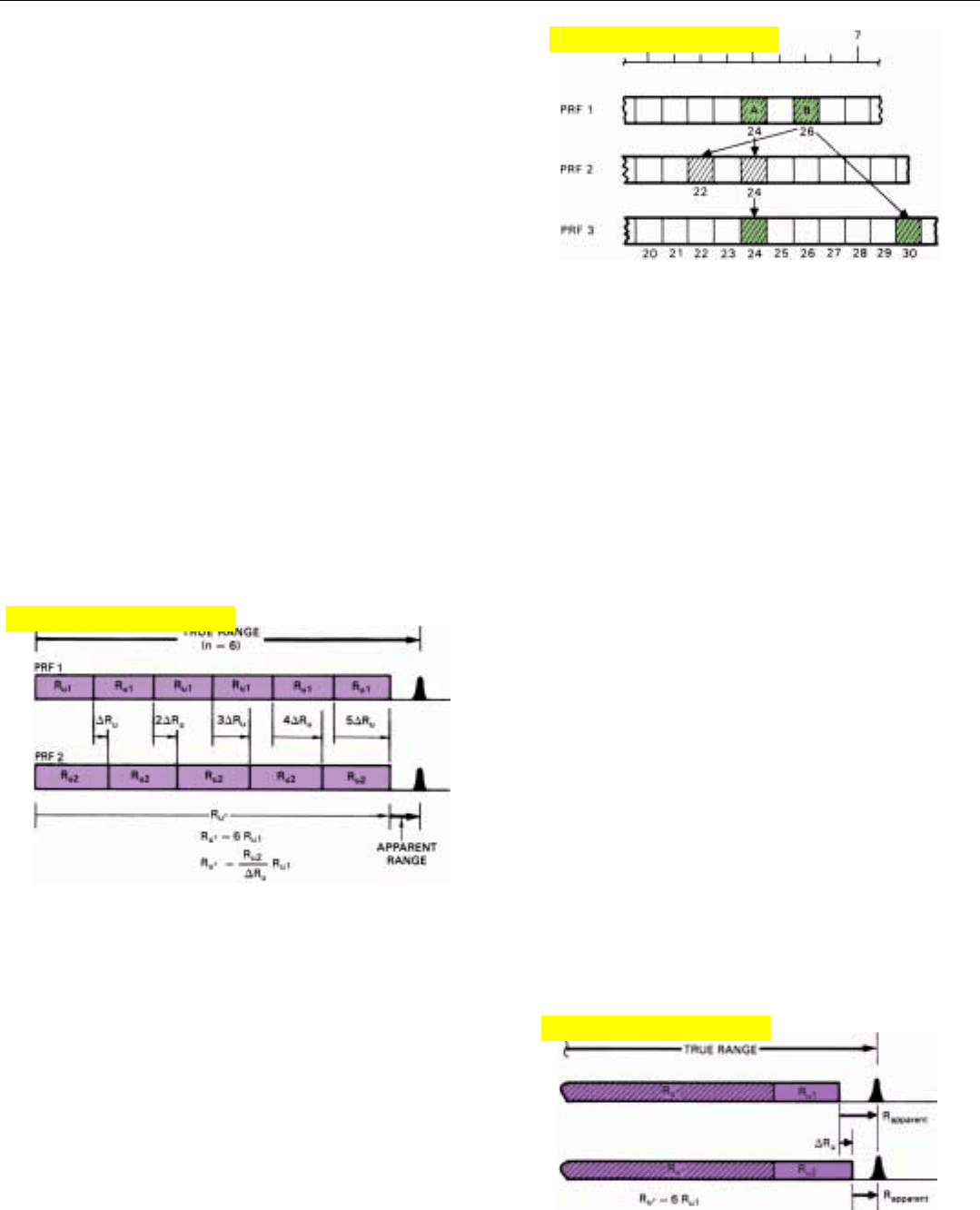
Example of Ghosts. Figure 23 shows two targets, A and
B, in the same bank of range bins as used in the preceding
example. When the radar is transmitting at the first PRF, the
targets are two bins apart: A is in bin No. 24 (apparent
range, 6 miles); B is in bin No. 26 (apparent range, 6
1
/2
miles). When we switch to the second PRF, the targets
appear in bins No. 22 and No. 24. But we have no direct
way of telling whether A and B have both moved to the left
two bins, or, whether A has merely stayed put and B has
moved four bins to the left and is in bin No. 22.
Each target thus has two possible true ranges (Fig. 24). If
both A and B have moved two bin positions, the true
ranges are
Target A: (2 x 10) + 6 = 26 nmi
Target B: (2 x 10) + 6
1
/2 = 26
1
/2 nmi
On the other hand, if A stayed put and B moved four bin
positions, the true ranges are
Target A: (0 x 10) + 6 = 6 nmi
Target B: (4 x 10) + 6
1
/2 = 46
1
/2 nmi
One of the two pairs of ranges are ghosts.
Identifying Ghosts. The ghosts may be identified by
switching to a third PRF (Fig. 25). To simplify the explana-
tion, we’ll assume that PRF No. 3 is just enough higher
than PRF No. 1 to decrease R
u
by
1
/4 mile—i.e., shorten it
by one range bin (from 40 to 39 bins). Accordingly, when
PRF No. 3 is used, for every whole time R
u
is contained in
either target’s true range, the target will appear one position
to the right of the bin it occupied when PRF No. 1 was
used. This is the same number of positions it appeared to
the left of that bin when PRF No. 2 was used.
Let’s say for example, that we switch to PRF No. 3 and
the targets appear in bins 26 and 28. Which of the two
pairs of ranges are ghosts?
As you can see from the figure (Fig. 26), bin 26 is two
positions to the right of the bin A originally occupied.
Likewise, bin 28 is two positions to the right of the bin B
originally occupied. Since, when we switched earlier to PRF
No. 2, one target appeared two positions to the left of the
bin A originally occupied and the other target appeared two
positions to the left of the bin B originally occupied, we con-
clude that n = 2 for both targets. Their true ranges are 26
miles and 26
1
/2 miles. The other pair of ranges are ghosts.
23. When PRF was switched, did A move to bin No. 22 and B to
bin No. 24, or, did A stay put?
24. Each target shown in Fig. 23 has two possible true ranges.
25. To identify the ghosts, a third PRF is added. In this case, it
de
creases R
u
by 1/4 nautical mile.
26. When radar is switched to PRF 3, targets jump to bins 26 and
28. The value of n for both targets must be 2.
Click for high-quality image
Click for high-quality image
It may be instructive to consider where the targets would
have appeared when we switched to PRF No. 3 had the first
pair of ranges been ghosts and the second pair—6 miles
and 46
1
/2 miles—been the true ranges. In that case
(Fig. 27), since n = 0 for 6 miles, target A would have
stayed put. Since n = 4 for 40 miles, target B would have
moved 4 positions to the right—the same distance (for
these particular PRFs) that it must have moved to the left
when earlier we switched to PRF No. 2.
How Many PRFs?
From what has been said so far, it might appear that no
more than three PRFs would ever be required: one for mea-
suring ranges, another for resolving range ambiguities, a
third for deghosting simultaneously detected targets. This is
not so, however.
Number of PRFs for Resolving Ambiguities. Depending
on how great the detection ranges are and how high and
widely spaced the PRFs are, more than one PRF (besides
the first) may be required to resolve ambiguities. Figure 28
illustrates why.
CHAPTER 12 Pulse Delay Ranging
159
27. If A’s true range had been 6 miles, it would have stayed put
when the radar was switched to PRF 3, and B would have
jumped four positions to the right.
28. Range for which ambiguities can no longer be resolved by switch-
ing between two PRFs. Since 5R
u2
= 6 R
u1
, apparent range does
not change when PRF is switched. R
u
‘, is maximum unambiguous
range for this combination of PRFs.
29. If true range is increased beyond R
u
‘, apparent range will
change when PRF is switched, but (in this case) only by
amount corresponding to (n – 6).
The true range in that example includes six whole multi-
ples of the unambiguous range for PRF No. 1 (n = 6). This
is clear. But the difference in the unambiguous ranges for
the two PRFs (∆R
u
) is such that five times the unambiguous
range for PRF No. 2 exactly equals six times the unambigu-
ous range for PRF No. 1. Consequently, for the target range
assumed here (Fig. 29), when the PRF is switched the
apparent range remains the same, just as though n = 0.
If the true range were long enough to make n = 7 or
more, the apparent range would again change when the
PRF was switched, but the change then would only indicate
Click for high-quality image
Click for high-quality image
Click for high-quality image

PART III Radar Fundamentals
160
how much n exceeds 6. This particular combination of
PRFs extends the maximum unambiguous range to six
times the unambiguous range for PRF No. 1, but no farther
(Fig. 30).
In fact, a more general expression for the true range than
that given earlier might be
True range = n’R
u
’ + nR
u
+ R
apparent
where R
u
’ is the unambiguous range for the combination of
the two PRFs and n’ is the number of whole times R
u
’ is
contained in the true range. To find the value of n’ we must
switch to a third PRF.
With the aid of a diagram like Fig. 30, it can be shown
that for every additional PRF the unambiguous range for
the combination increases by the ratio of (a) R
u
for the
added PRF to (b) the difference between that value of R
u
and the value for the preceding PRF (Fig. 31). Thus, if the
unambiguous ranges for three PRFs taken individually are
3, 4, and 5 miles, the unambiguous range for the combina-
tion is
3
/1 x
4
/1 x
5
/1 = 60 miles. How many PRFs are
required for resolving range ambiguities, then, depends
upon the desired maximum unambiguous range and the
values of R
u
for the individual PRFs.
30. Just as adding a second PRF increases the unambiguous range from R
u
to R
u
’, adding a third PRF increases it to R
u
”. For any one combina-
tion of R
u
1
, R
u
2
, R
u
3
, and R
apparent
, there is only one possible value of the true range. It is uniquely indicated by the values of the three appar-
ent ranges, R
a
1
, R
a
2
, and R
a
3
.
31. For each additional PRF, the unambiguous range for the com-
bination is increased by the ratio of the unambiguous range,
R
u
, for the added PRF to the difference between R
u
for that PRF
and R
u
for the preceding PRF.
Click for high-quality image