George W. Stimson introduction to Airborne Radar (Se)
Подождите немного. Документ загружается.

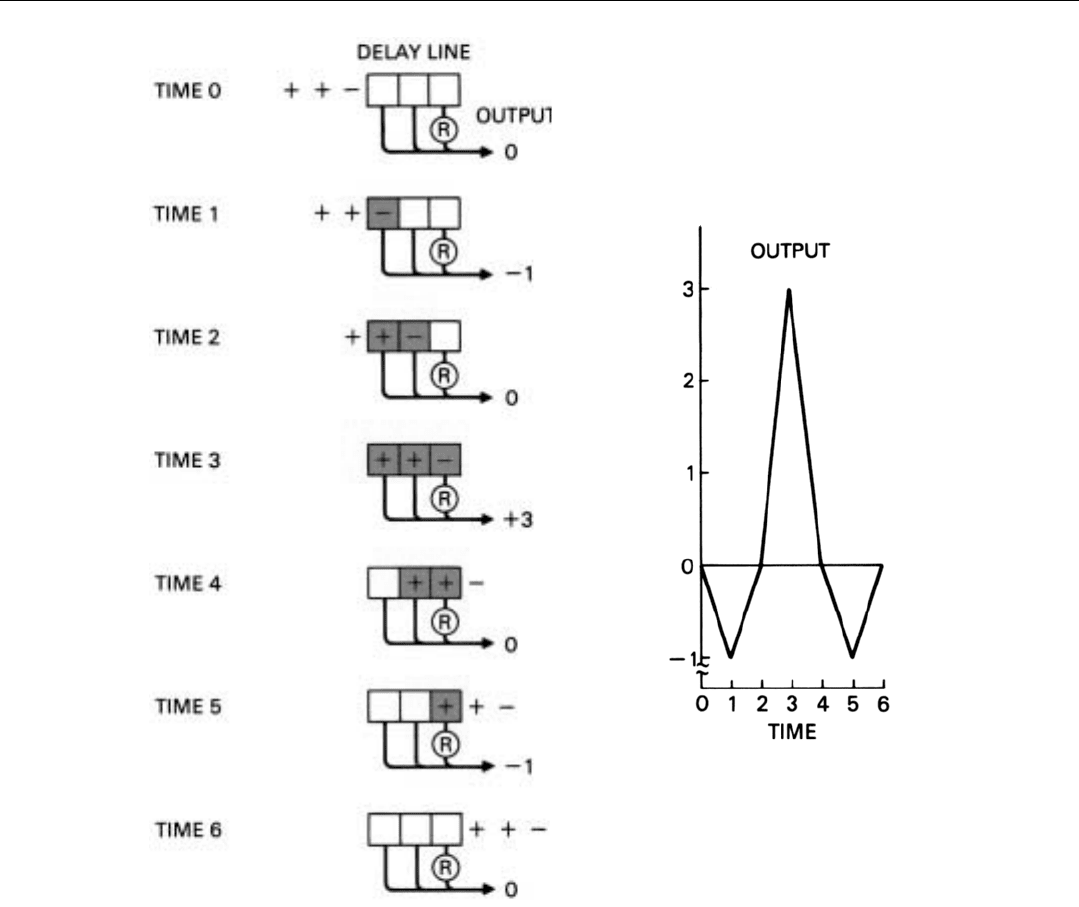
segment (Fig. 15). Since its phase is 180˚, the output is
negative: – 1.
An instant later, Segment No. 2 has entered the line.
Now the output signal equals the sum of Segments No. 1
and No. 2. Since the segments are 180˚ out of phase, how-
ever, they cancel: The output is 0.
When Segment No. 3 has entered the line, the output
signal is the sum of all three segments. Segment No. 1, you
will notice, has reached a point in the line where the tap
contains a phase reversal. The output from this tap, there-
fore, is in phase with unshifted Segment No. 2. The phase
of Segment No. 3 also being unshifted, the combined out-
put of the three taps is three times the amplitude of the
individual segments: +3.
CHAPTER 13 Pulse Compression
171
15. Step-by-step progress of a 3-digit binary phase modulated pulse through a tapped delay line.
PART III Radar Fundamentals
172
As Segments No. 2 and No. 3 pass through the line, this
same process continues. The output drops to zero, then
increases to minus one, and finally returns to zero again.
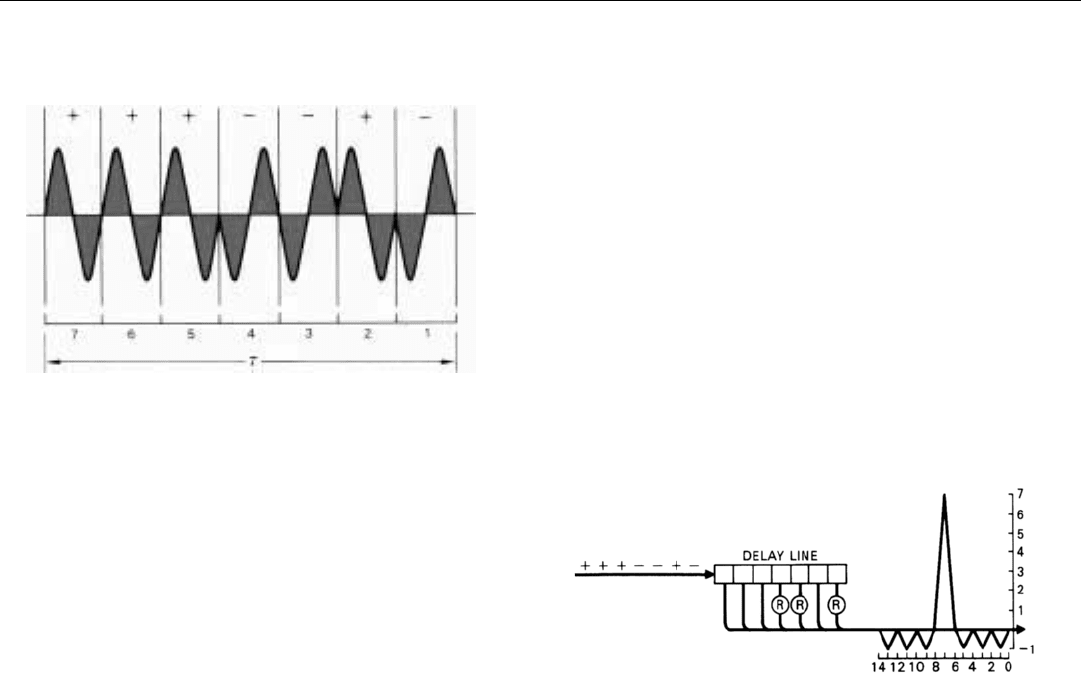
A somewhat more practical example is shown in Fig. 16.
This code has seven digits. Assuming no losses, the peak
amplitude of the compressed pulse is seven times that of
the uncompressed pulse, and the compressed pulse is only
one-seventh as wide.
To see why the code produces the output it does, transfer
the code to a sheet of paper and slide it across the delay line
plotted in Fig. 17 (below), digit by digit, noting the sum of
the outputs for each position. (A minus sign, –, over a tap
with a reversal
®
in it, becomes a +; and a + becomes a –.)
You should get the output shown in the figure.
16. A seven-digit binary phase code.
17. Output produced when seven-digit phase code is passed through
tapped delay line with phase reversals in appropriate taps.
Sidelobes. Ideally, for all positions of the echo in the line—
except the central one—the outputs from the same number of
taps would have phases of 0˚ and 180˚. The outputs would
then cancel, and there would be no range sidelobes.
One set of codes, called the Barker codes, comes very
close to meeting this goal (Fig. 18). Two of these have been
used in the examples. As you have seen, they produce side-
lobes whose amplitudes are no greater than the amplitude
of the individual segments. Consequently, the ratio of main-
lobe amplitude to sidelobe amplitude, as well as the pulse
compression ratio, increases with the number of segments
into which the pulses are divided—i.e., the number of dig-
its in the binary code.
Unfortunately, the longest Barker code contains only 13
digits. Other binary codes can be made practically any
length, but their sidelobe characteristics, though reasonably
good, are not quite so desirable.
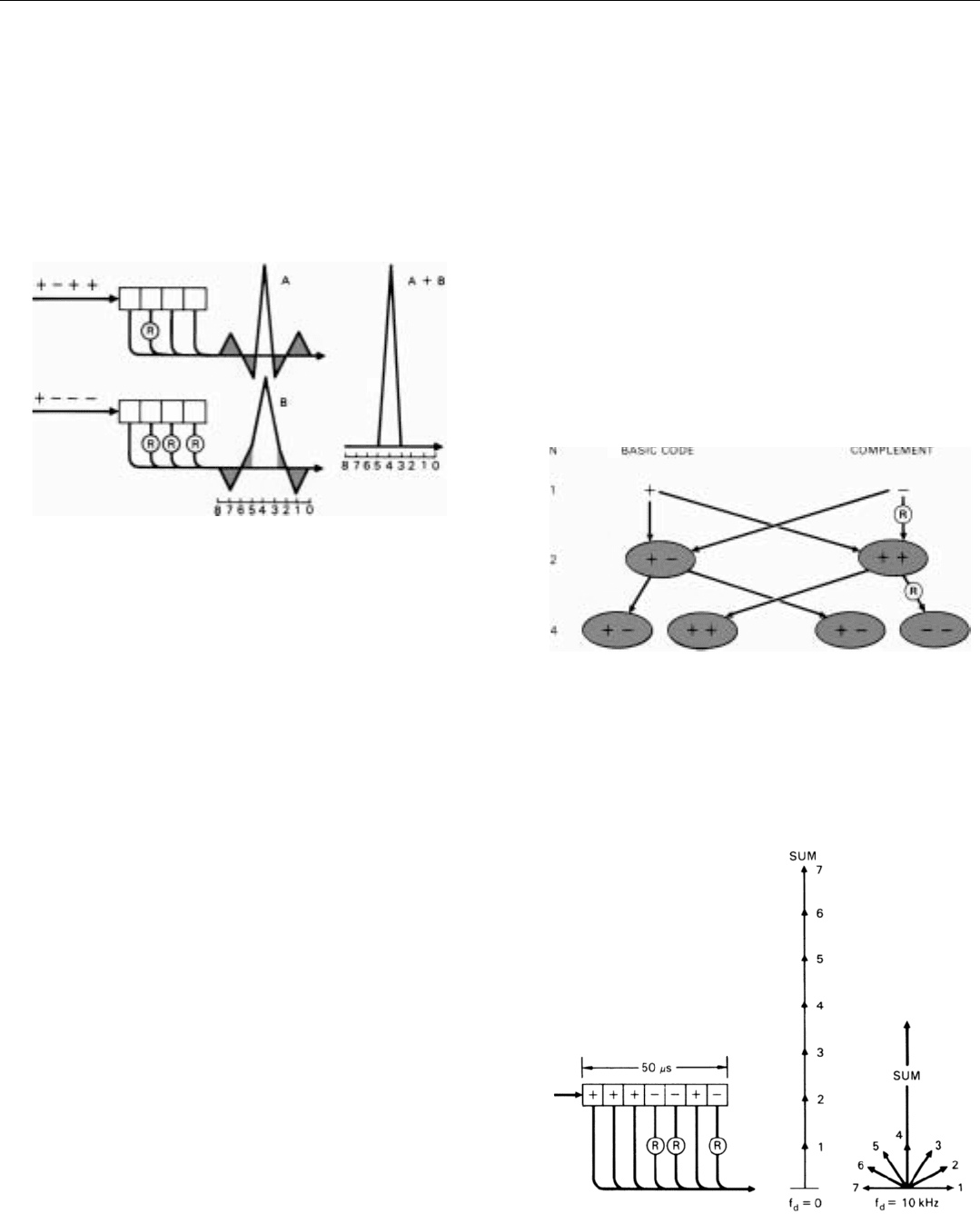
Complementary Barker Codes. It turns out that the four-
digit Barker code has a special feature which enables us not
only to eliminate the sidelobes altogether but to build codes
of great length.
18. Barker codes come very close to the goal of producing no
sidelobes. But the largest code contains only 13 digits.
N BARKER CODES
2 OR ( )
3
4 OR ( )
5
7
11
13
Note: Plus and minus signs may be interchanged
( changed to ); order of digits may be reversed
( changed to ). Codes in parentheses are
complementary codes.
This code, and also the two-digit code, have comple-
mentary forms. Corresponding sidelobes produced by the
two forms have opposite phases. Therefore, it we alternately
modulate successive transmitted pulses with the two forms
of the code—and appropriately switch the locations of the
phase reversals in the outputs of the delay line, for alternate
interpulse periods—when the returns from successive puls-
es are integrated the sidelobes cancel (Fig. 19).
CHAPTER 13 Pulse Compression
173
19. Echoes with complementary phase coding, received from same tar-
get during alternate interpulse periods. When echoes are integrat-
ed, time sidelobes cancel.
20. How complementary codes are formed. Basic two-digit code
is formed by chaining basic binary digit (+) to its complement
(–), Complementary two-digit code is formed by chaining
basic binary digit (+) to its complement with sign reversed (+).
Basic four-digit code is formed by chaining basic two-digit
code to complementary two-digit code. Complementary four-
digit code is formed by chaining basic two-digit code to com-
plementary two-digit code with sign reversed, and so on.
More importantly, by chaining the complementary forms
together according to a certain pattern, we can build codes
of almost any length. As illustrated in Fig. 20, the two forms
of the four-digit code are just such combinations of the two
forms of the two-digit code; and these are just such combi-
nations of the two fundamental binary digits, + and –.
Unlike the unchained Barker codes, the chained codes
produce sidelobes having amplitudes greater than one. But
since the chains are complementary, these larger sidelobes—
like the others—cancel when successive pulses are integrat-
ed.
Limitations of Phase Coding. The principal limitation of
phase coding is its sensitivity to doppler frequencies. If the
energy contained in all segments of a phase-coded pulse is
to add up completely when the pulse is centered in the
delay line, while cancelling when it is not, very little shift in
phase over the length of the pulse can be tolerated, other
than the 180˚ phase reversal due to the coding.
As will be explained in Chap. 15, a doppler shift is actu-
ally a continuous phase shift. A doppler shift, of, say, 10
kilohertz amounts to a phase shift of 10,000 x 360˚ per sec-
ond, or 3.6˚ per microsecond. If the radar’s pulses are as
much as 50 microseconds long (Fig. 21), this shift will itself
equal 180˚ over the length of the pulse, and performance
will deteriorate. For the scheme to be effective, either the
21. Reduction in peak output of tapped delay line for 50
microsecond, phase-coded pulse, resulting from doppler shift
of 10 kilohertz.
PART III Radar Fundamentals
174
doppler shifts must be comparatively small or the uncom-
pressed pulses reasonably short.
2
Polyphase Codes
Phase coding is not, of course, limited to just two incre-
ments (0˚ and 180˚). Codes employing any number of dif-
ferent, harmonically related phases may be used—e.g., 0˚,
90˚, 180˚, 270˚. One example is a family called Frank
codes.
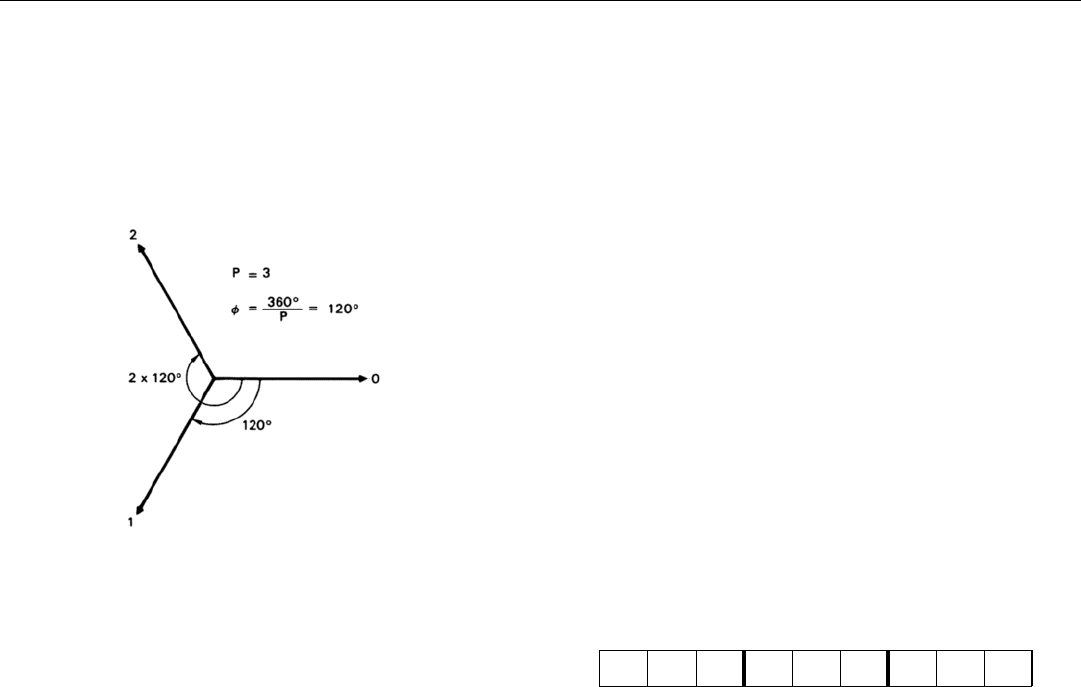
The fundamental phase increment, φ, for a Frank code is
established by dividing 360˚ by the number of different
phases to be used in the code, P. The coded pulse is then
built by chaining together P groups of P segments each.
The total number of segments in a pulse, therefore, equals
P
2
.
In a three-phase code (Fig. 22), for example, the funda-
mental phase increment is 360˚ ÷ 3 = 120˚, making the
phases 0˚, 120˚, and 240˚. The coded pulse consists of three
groups of three segments—a total of 9 segments.
Group 1 Group 2 Group 3
Phases are assigned to the individual segments according
to two simple rules. (1) The phase of the first segment of
every group is 0˚. That is, 0˚ __ __, 0˚ __, __, 0˚ __, __.
(2) The phases of the remaining segments in each group
increase in increments of
∆Φ = (G – 1) x (P – 1) x φ˚
where G is the group number and φ is the basic increment.
For a three-phase code (P = 3, φ = 120˚, P – 1 = 2), then
∆Φ = (G – 1) x 2φ. So the phase increment in Group 1 is
0˚, the phase increment for Group 2 is 2φ, and the phase
increment for Group 3 is 4φ.
Written in terms of φ, the nine digits of the code for P = 3
thus are
Group 1 Group 2 Group 3
0, 0, 0, 0, 2φ, 4φ, 0, 4φ, 8φ
Substituting 120˚ for φ and dropping multiples of 360˚,
the code becomes
Group 1 Group 2 Group 3
0˚, 0˚, 0˚, 0˚, 240˚, 120˚, 0˚, 120˚, 240˚
22. Phase increments for a Frank code in which number of phas-
es, P, is three.
2. This constraint may in some
cases be circumvented through
“doppler tuning,” a technique
whereby the doppler shift is
largely removed before the
pulses are passed through the
compression filter.
∆Φ = (G – 1) x (P – 1) x φ˚
G = group
P = number of phases
φ = basic phase increment
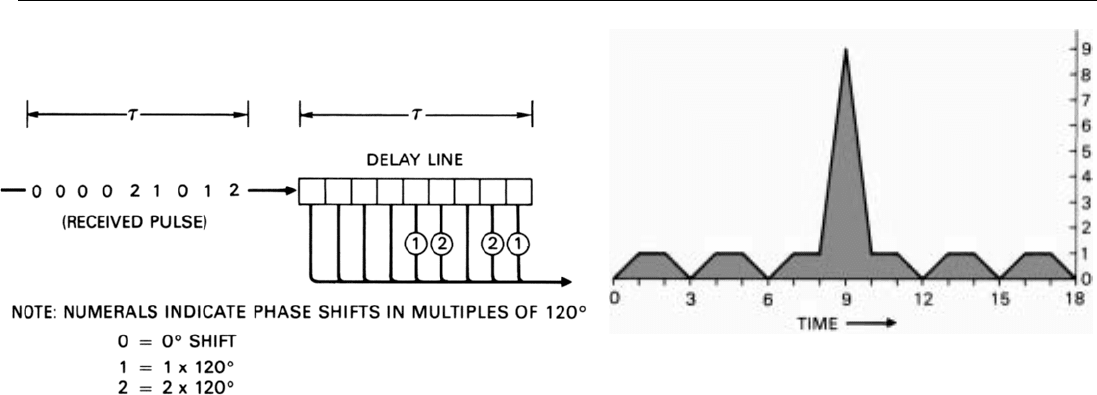
Echoes are decoded by passing them through a tapped
delay line (or the digital equivalent) in the same way as
binary-phase-coded echoes (Fig. 23). The only difference:
the phase shifts in the taps have more than one value.
For a given number of segments, a Frank code provides
the same pulse compression ratio as a binary phase code
and the same ratio of peak amplitude to sidelobe amplitude
as a Barker code. Yet, by using more phases (increasing P),
the codes can be made any length. As P is increased, how-
ever, the size of the fundamental phase increment decreas-
es, making performance more sensitive to externally intro-
duced phase shifts and imposing more severe restrictions
on uncompressed pulse width and maximum doppler shift.
Summary
The commonly used pulse compression techniques are lin-
ear frequency modulation (chirp) and binary phase coding.
In chirp, the frequency of each transmitted pulse is con-
tinuously increased or decreased. Received pulses are
passed through a filter, which introduces a delay that
decreases or increases with frequency. Successive increments
of a pulse, therefore, bunch up. Width of the compressed
pulse is 1/∆F, where ∆F is the total change in frequency.
The pulse has sidelobes, but they can be acceptably
reduced by tapering the amplitude of the uncompressed
pulse.
When only a narrow range swath is of interest, chirp can
be decoded with stretch radar techniques, whereby range is
converted to frequency. Differences in frequency are
resolved by a bank of fixed-tuned filters, implemented with
the efficient fast Fourier transform.
CHAPTER 13 Pulse Compression
175
23. Processing of Frank codes is similar to that of binary codes. Phase shifts introduced in taps complement shifts in corresponding segments of
coded pulse. If phase of a segment is shifted by 1 x 120
˚, corresponding tap adds a shift of 2 x 120˚, making total shift when pulse fills
line equal 3 x 120˚ = 360˚.

PART III Radar Fundamentals
176
Chirp has the advantage of providing large compression
ratios and being simple.
In binary phase modulation, each pulse is marked off
into segments, and the phase of certain segments is
reversed. Received pulses are passed through a tapped
delay line having phase reversals in corresponding taps.
The output pulse is the width of the segments. It, too, has
sidelobes.
With Barker codes the mainlobe-to-sidelobe ratio equals
the pulse-compression ratio, but the longest code is only 13
digits. Sidelobes can be eliminated by alternately transmit-
ting complementary forms of the four-digit code. These can
be chained to any length. But, if doppler shifts are large,
performance deteriorates unless pulses are reasonably
short.
Polyphase—e.g., Frank—codes can also be used, but
they are even more sensitive to doppler frequency.
177
FM Ranging
I
f enough PRFs can be provided to resolve the growing
number of range ambiguities that arise as the PRF is
increased, pulse delay ranging can be employed suc-
cessfully even at fairly high PRFs. However, a point is
ultimately reached where the echoes return so “thick and
fast” it is virtually impossible to resolve the ambiguities
(Fig. 1). Range, if required, must then be measured indi-
rectly, as in CW radars. The most common indirect
method is linear frequency modulation, or FM, ranging.
1
This chapter briefly describes the principle of FM rang-
ing. It explains how doppler frequency shifts, which would
otherwise introduce gross measurement errors, are taken
into account and how a problem of ghosting similar to that
encountered in PRF switching is handled. Finally, it briefly
considers the accuracy which may be obtained with FM
ranging.
Basic Principle
With FM ranging, the time lag between transmission
and reception is converted to a frequency difference. By
measuring it, the time lag—hence the range—is deter-
mined.
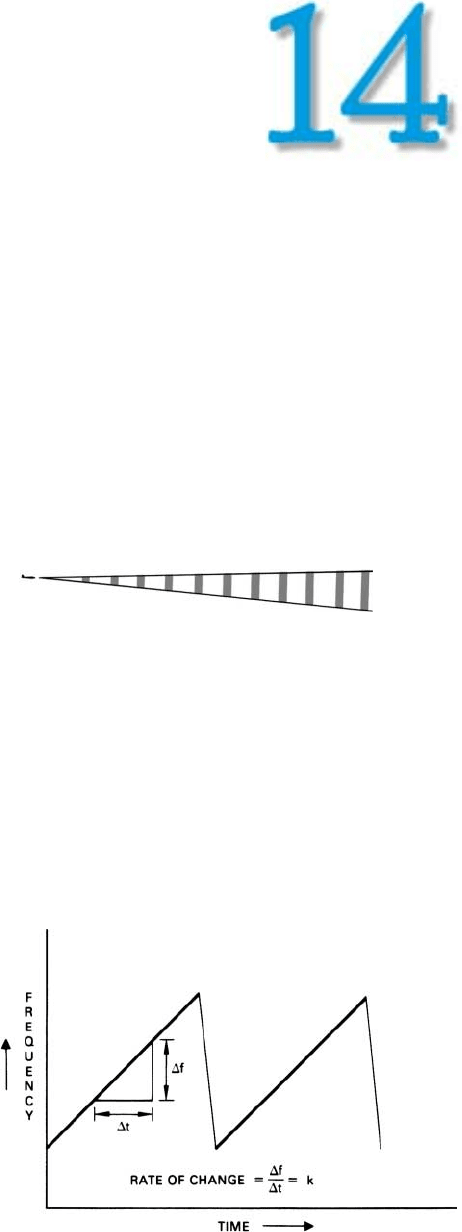
In simplest form, the process is as follows. The radio
frequency of the transmitter is increased at a constant
rate. Each successive transmitted pulse thus has a slightly
higher radio frequency. The linear modulation is contin-
ued for a period at least several times as long as the round-
trip transit time for the most distant target of significance
(Fig. 2). Over the course of this period, the instantaneous
difference between the frequency of the received echoes
1. If the PRF is increased beyond a certain point, it becomes
impractical, if not impossible, to resolve range ambiguities.
Ranging time must then be measured indirectly.
2. In simplest form, FM ranging involves changing the transmitter
frequency at a constant rate. Length of slope is generally
many times maximum round-trip transit time.
1. Another form of FM ranging
which has advantages in
some applications employs
sinusoidal modulation.
PART III Radar Fundamentals
178
and the frequency of the transmitter is measured. The
transmitter is then returned to the starting frequency, and
the cycle is repeated.
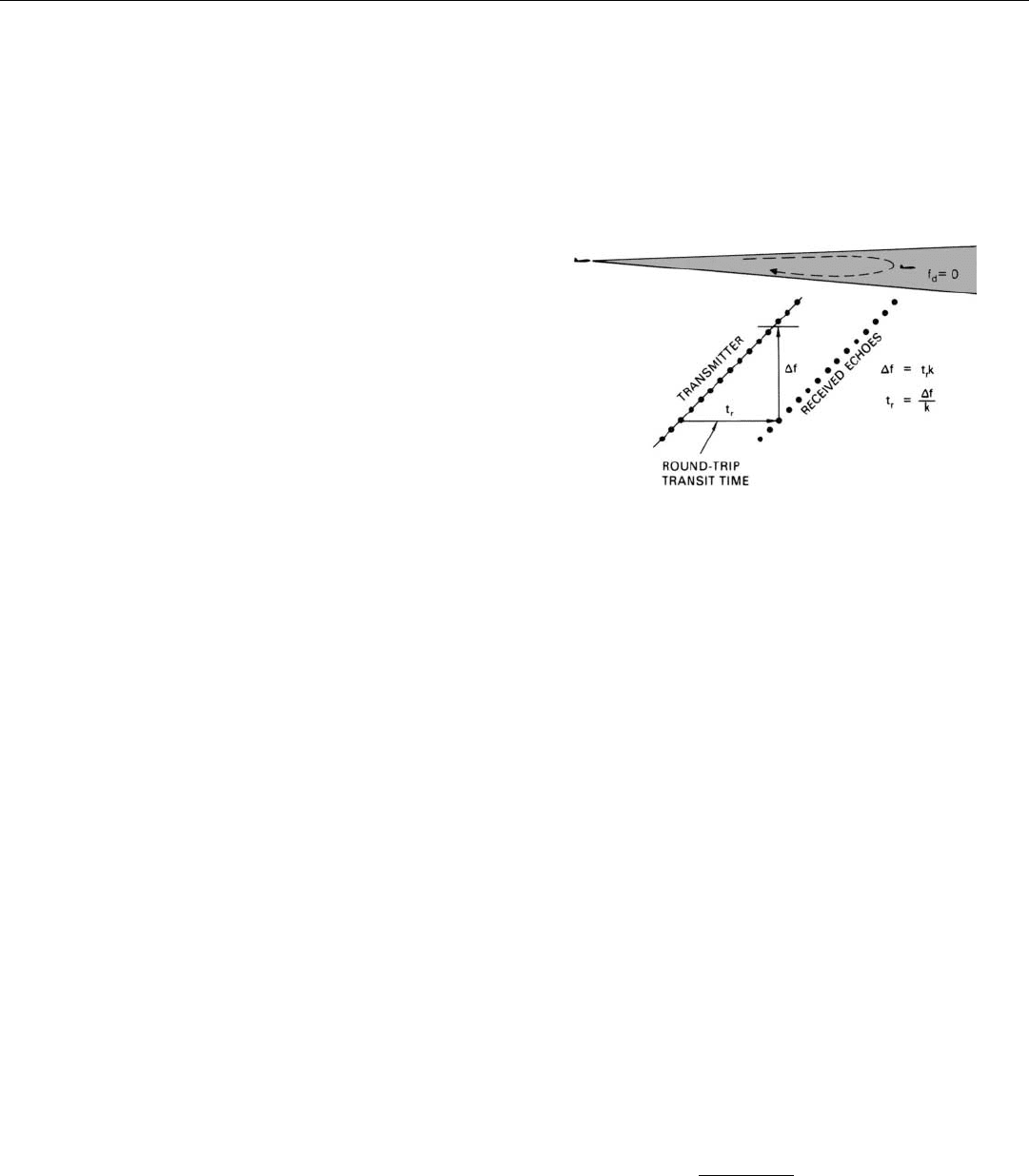
Just how the measured frequency difference is related to
a target’s range is illustrated in Fig. 3 for a static situation.
That is a situation, such as a tail chase, where the range
rate is zero.
In this figure, the radio frequency of both the transmit-
ter and the echoes received from a target are plotted versus
time. The dots on the plot of transmitter frequency represent
individual transmitted pulses. The horizontal distance
between each of these dots and the dot representing the
received target echo is the round-trip transit time. The ver-
tical distance between the echo dot and the line represent-
ing the transmitter frequency is the difference, ∆f, between
the frequency of the echo and the frequency of the trans-
mitter when the echo is received.
As you can see, this difference equals the rate of change
of the transmitter frequency—hertz per microsecond—
times the round-trip transit time. By measuring the fre-
quency difference and dividing it by the rate (which we
already know), we can find the transit time.
Suppose, for example, that the measured frequency dif-
ference is 10,000 hertz and the transmitter frequency has
been increasing at a rate of 10 hertz per microsecond. The
transit time is
t
r
=
10,000 Hz
= 1,000 µs
10 Hz/µs
Since 12.4 microseconds of round-trip transit time corre-
spond to one nautical mile of range, the target’s range is
equal to 1000 ÷ 12.4 = 81 nautical miles.
3. Difference between the frequency of an echo and the frequen-
cy of the transmitter at the time an echo is received (
∆f) is
proportional to transit time (t
r
).
Accounting for the Doppler Shift
Actually, the process is more complicated than just out-
lined, for the range rate rarely is zero. The frequency of a
target echo is not equal solely to the frequency of the trans-
mitted pulse that produced it, but to that frequency plus
the target’s doppler frequency. To find the transit time, we
must add the doppler frequency, f
d
, to the measured fre-
quency difference (Fig. 4).
Including a Constant-Frequency Segment. As you may
have surmised, the doppler frequency can be found by
interrupting the frequency modulation at the end of each
cycle and transmitting at a constant frequency for a brief
period. During this period, the difference between the echo
frequency and the transmitter frequency will be due solely
to the target’s doppler frequency. By measuring that differ-
ence (Fig. 5) and adding it to the difference measured dur-
ing the sloping segment, we can find the transit time.
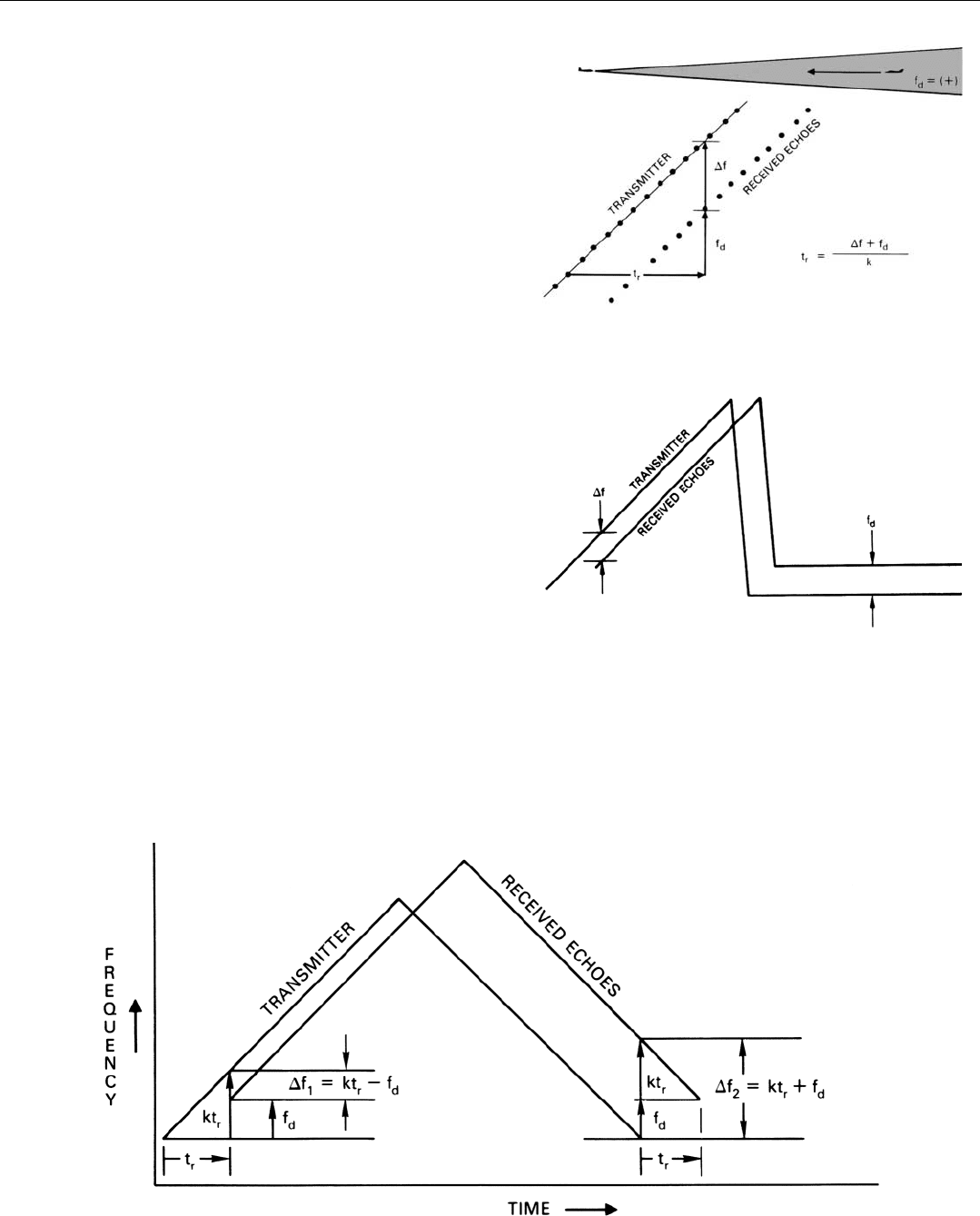
Alternate, Two-Slope Cycle. It turns out that the doppler
frequency can be added just as easily by employing a two-
slope modulation cycle. The first slope is the same as the
rising-frequency slope just described. Once it has been tra-
versed, the frequency is decreased at the same rate until the
starting frequency is again reached (Fig. 6 below). The cycle
is then repeated.
If the target is closing—i.e., has a positive doppler fre-
quency, f
d
—the difference between the frequency of the
transmitter and the frequency of the received echoes will be
decreased by f
d
during the rising-frequency segment and
increased by f
d
during the falling-frequency segment. (The
CHAPTER 14 FM Ranging
179
6. With two-slope modulation, frequency difference is decreased by f
d
during rising slope and increased by f
d
during rising slope and
increased by f
d
during falling slope.
4. Frequency difference, ∆f, between transmitter and received
echoes is reduced by target’s doppler frequency, f
d
. To find
transit time, f
d
must be added to ∆f.
5. Target’s doppler frequency (f
d
) may be measured by adding a
constant frequency segment to the modulation cycle.
PART III Radar Fundamentals
180
reverse will be true if the target is opening.) Consequently,
if the frequency differences for the two segments are added,
the doppler frequency will cancel out.
∆f
1
= kt
r
– f
d
∆f
2
= kt
r
+ f
d
∆f
1
+ ∆f
2
= 2kt
r
+ 0
The sum, then, will be twice the frequency difference,
kt
r
, due to the round-trip transit time. The latter can be
found by dividing the sum by twice the rate of change of
the transmitter frequency.
t
r
=
∆
f
1
+
∆
f
2
2k
where
t
r
= round-trip transit time
∆
f
1
= difference between transmitter and echo
frequencies during rising-frequency seg-
ment
∆f
2
= difference between transmitter and echo
frequencies during falling-frequency seg-
ment
k = rate of change of transmitter frequency
Again, knowing the transit time, we can readily calculate
the target range.
Suppose the target used in the previous example (k = 10
Hz/µs, kt
r
= 10 kHz) had a doppler frequency of 3 kilo-
hertz. During the rising-frequency segment, the measured
frequency difference would have been 10 – 3 = 7 kHz.
During the falling-frequency segment, it would have been
10 + 3 = 13 kHz. Adding the two differences and dividing
by 2 k (20 Hz / µs second) gives the same transit time, 1000
microseconds, as when the doppler frequency was zero.
Although in both this example and the illustrations the
doppler frequency is positive, the equation works just as
well for negative doppler frequencies.
Eliminating Ghosts
If the antenna beam encompasses two targets at the same
time, a problem of ghosting may be encountered, as with
PRF switching. There will be two frequency differences dur-
ing the first segment of the modulation cycle and two dur-
ing the second (Fig. 7). This is true, of course, regardless of
whether both segments are sloped or one is sloped and the
other is not.
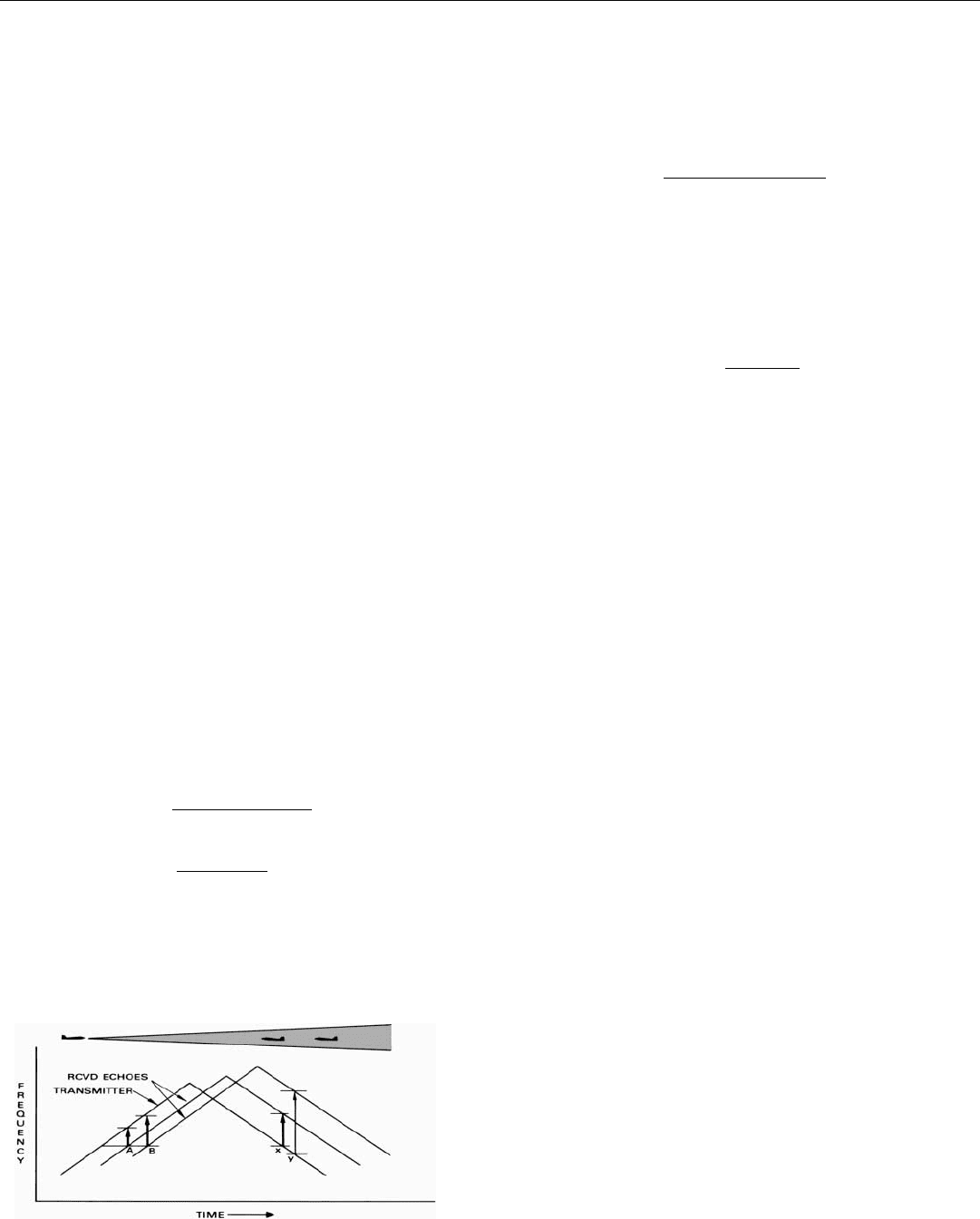
7. If two targets are detected simultaneously, two frequency dif-
ferences will be measured during each segment of the cycle.
t
r
=
7kHz + 13 kHz
2 X .01 KHz/µs
=
20 kHz
.02 kHz/µs
= 1,000 µs