George W. Stimson introduction to Airborne Radar (Se)
Подождите немного. Документ загружается.

Now, the role of the filter is to further narrow the receiv-
er passband by integrating the energy of successive pulses.
What the filter does, in effect, is add up the phasors. In the
case of noise, because of the randomness of phase, the puls-
es largely cancel.
4
At the end of the integration period, the magnitude of the
sum—the integrated noise, N
→
—is little different than the
amplitude of a single noise pulse and only a fraction of the
sum of the amplitudes of the individual pulses. The integra-
tion period, we will assume, corresponds to a single time-
on-target.
Noise Alone, Successive Times-on-Target. We repeat the
experiment a great many times—each repetition corre-
sponding to a separate time-on-target. As expected, because
of the randomness of the noise, the magnitude and phase of
the energy that accumulates in the filter, N
→
, vary widely
from one time-on-target to the next.
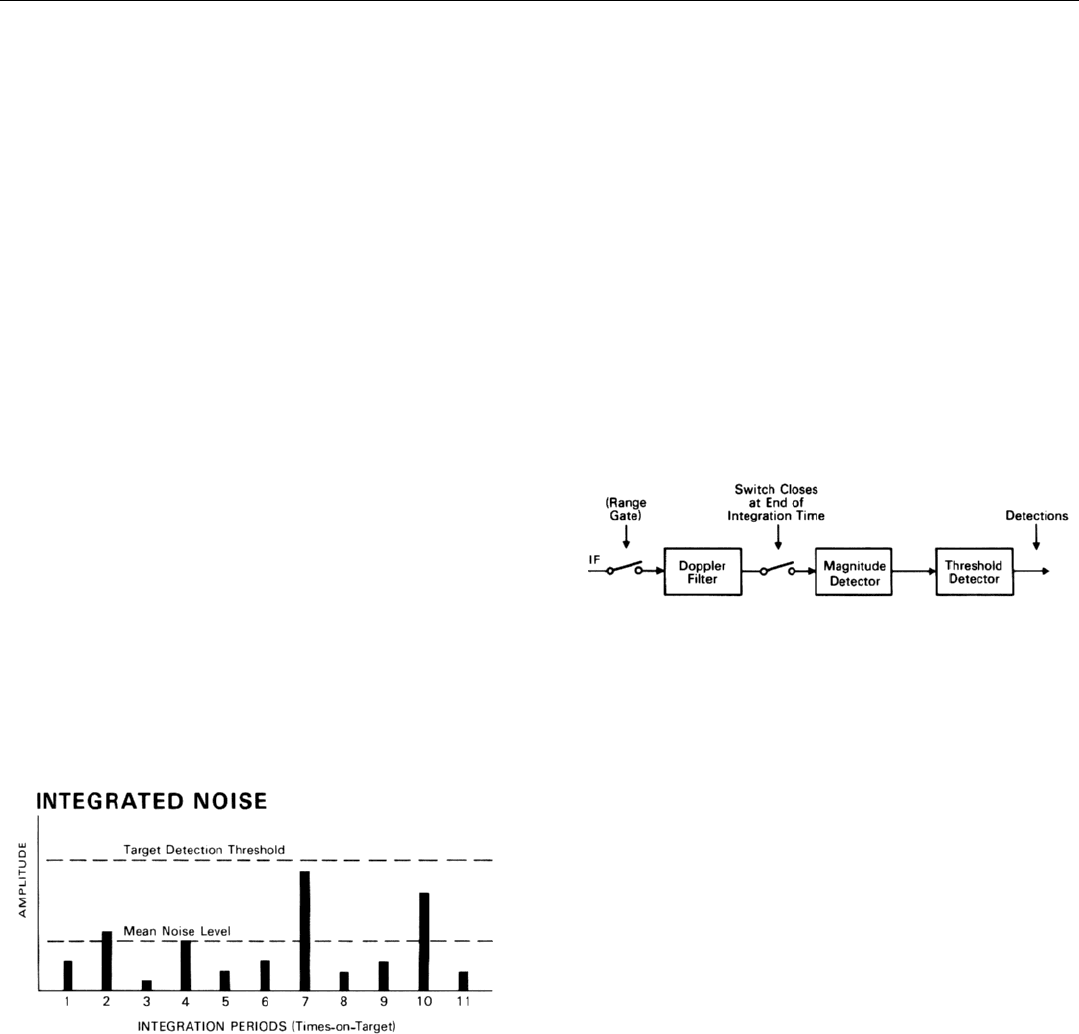
At the end of each time-on-target, the magnitude of the
accumulated energy is “detected” (Fig. 30). That is, a voltage
(video signal) proportional to the magnitude is produced.
Incidentally, since the integration takes place before this
detection, the integration is called predetection integration.
The video outputs for successive times-on-target are
plotted in Fig. 31.
CHAPTER 10 Detection Range
129
30. At the end of each integration period (time-on-target), the
amplitude of the energy accumulated in the filter is detected
and applied to a threshold detector.
31. Outputs of the amplitude detector of Fig. 30 at end of successive
times-on-target.
4. Actually, the phase of a tar-
get’s returns varies from pulse
to pulse in proportion to the
target‘s doppler frequency.
But as seen by a filter tuned to
this frequency, the phase is
constant.
As you can see, over a number of integrated periods, the
magnitude of the integrated noise varies randomly about a
mean value. Though not illustrated here, the variation in
phase is equally random.
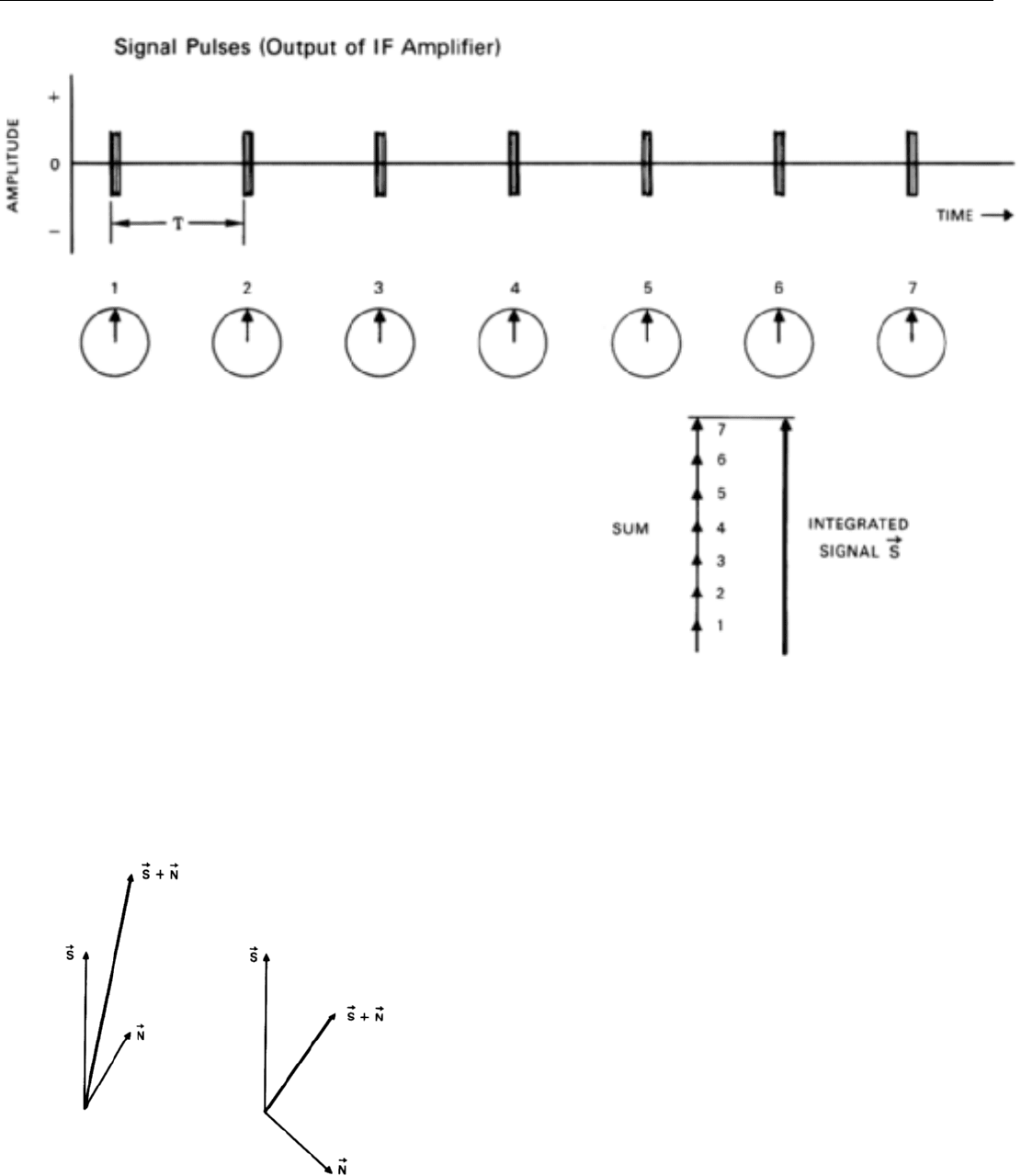
Target Signal Only. We repeat the experiment; this time,
with the target present but (through some magic) with the
noise absent. Now each time the range gate is closed, the fil-
ter receives a pulse of energy from the target. Unlike the
noise pulses, these all have the same phase.
5
When integrat-
5. During the very short time
interval discussed here.
PART III Radar Fundamentals
130
ed by the filter, they add constructively. At the end of each
integration period, their sum (Fig. 32, above)—the magni-
tude of the integrated signal, S
→
—very nearly equals the
sum of the amplitudes of the individual pulses.
How Signal and Noise Combine. Finally, we repeat the
experiment several times with both target signal and noise
present. Although they are indistinguishably mixed and so
integrate simultaneously, we can visualize the result more
clearly if we think of the signal and noise as being integrat-
ed separately and of their sums, S
→
and N
→
, being vectorially
added together at the end of the time-on-target. The magni-
tude of the vector sum, of course, depends not only upon
the magnitudes of S
→
and N
→
, but upon the phase angle
between them (Fig. 33). If the noise is in phase with the
signal, the two vectors will combine constructively; if the
noise is 180˚ out of phase, they will combine destructively;
and there are myriad possible combinations in between.
For any one time-on-target, therefore, the magnitude of the
energy that accumulates in the filter equals the magnitude
32. Phasor representation of signal pulses applied to doppler filter. Because phase is same from pulse to pulse, integrated signal is many times
amplitude of individual pulses.
33. Amplitude of integrated signal plus noise varies widely,
depending on amplitudes and phases of
S
→
and
N
→
.
of the integrated signal, S
→
, plus or minus some fraction of
the magnitude of the integrated noise, N
→
.
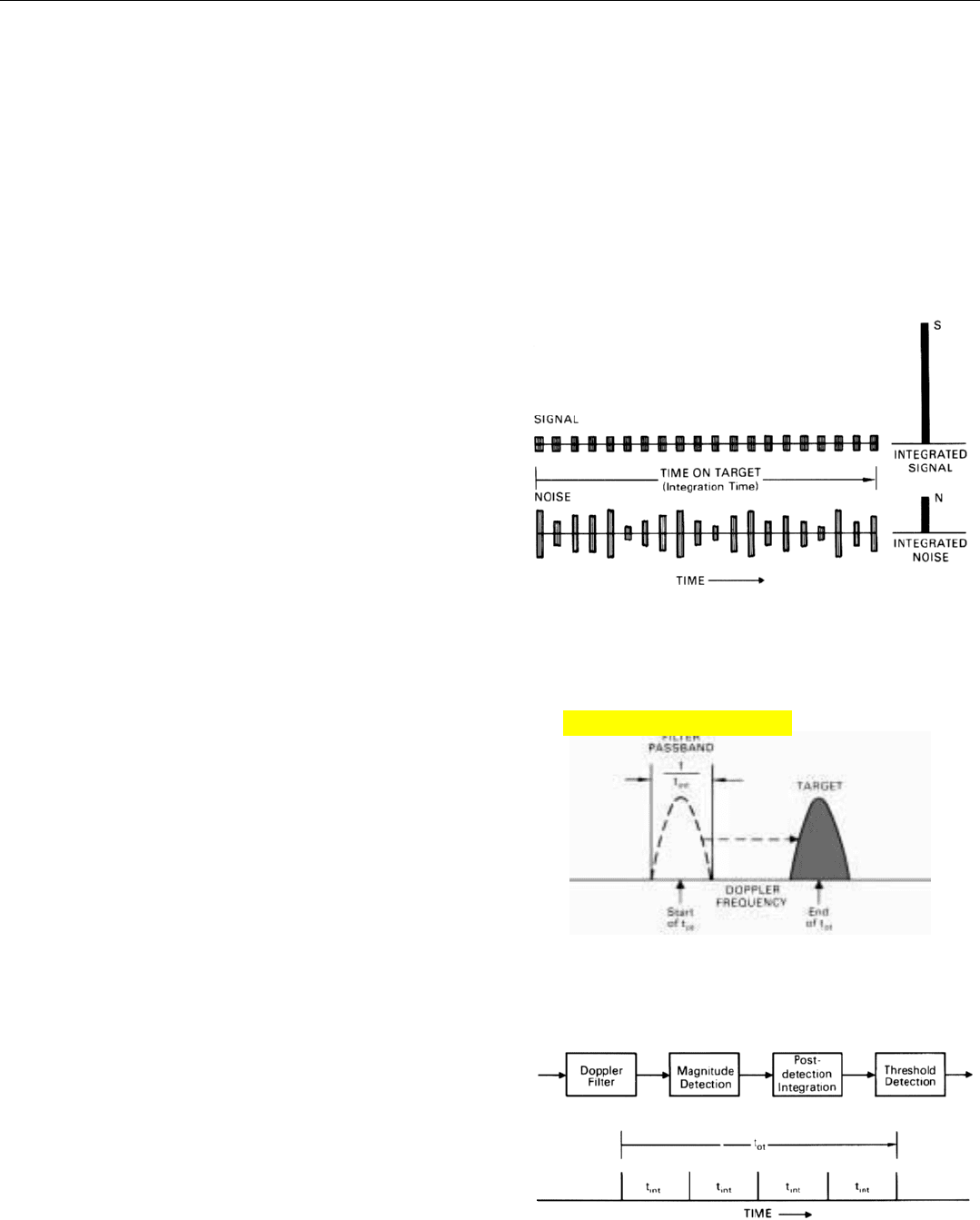
Improvement in Signal-to-Noise Ratio. How predetec-
tion integration improves the signal-to-noise ratio should
now be fairly clear. Whereas the noise energy that accumu-
lates in the filter may vary widely from one integration peri-
od to another, the mean level of the noise energy is essen-
tially independent of the integration time. The integrated
signal energy (target return), on the other hand, increases in
direct proportion to the integration time. By increasing the
integration time, therefore, the signal-to-noise ratio can be
increased significantly.
An individual target echo, for example, may contain only
one thousandth as much energy as an individual noise
pulse, yet after ten thousand pulses have been integrated,
the signal may be considerably greater than the noise.
Indeed, the improvement in signal-to-noise ratio achiev-
able through predetection integration is limited only by (1)
length of the time-on-target, t
ot
, or (2) the maximum practi-
cal length of the integration time, t
int
, if that is less than t
ot
,
or (3) the length of time over which the target’s doppler fre-
quency remains close enough to the same value for the tar-
get echoes to be correlated by the filter (Fig. 34). The
greater the improvement in signal-to-noise ratio, of course,
the weaker the target echoes can be and still be detected;
hence, the greater the detection range.
Postdetection Integration
Sometimes, the maximum practical integration time is a
good deal less than the time-on-target. Take, for example, a
situation where the doppler frequencies of expected targets
may be subject to rapid change. Since the width of the filter
passband is inversely proportional to the integration time
(bandwidth ≅ 1/t
int
), making t
int
as long as t
ot
could narrow
the passband to the point where the signal may very well
move out of it long before the time-on-target ends (Fig. 35).
In such instances, rather than lose any of the signal, the
integration time of the doppler filter is made short enough
to provide the required bandwidth, and integration and
video detection are repeated throughout the time-on-target
(Fig. 36). The video outputs for successive integration peri-
ods are then added together (integrated) and their sum is
applied to the threshold detector. This second integration
process is fundamentally the same as that employed in non-
doppler radars. Since it takes place after video detection, it
is called postdetection integration, or PDI.
Once the output of a doppler filter (or the output of the
IF amplifier in a non-doppler radar) has been converted to
CHAPTER 10 Detection Range
131
34. The improvement in signal-to-noise ratio is ultimately limited
only by the time-on-target, provided target echoes remain
correlated.
35. Situation in which target’s doppler frequency changes radi-
cally during time-on-target, t
ot
. If filter integration time, t
int
, is
made equal to t
ot
, target will move out of passband before
integration is finished.
36. Problem is solved by dividing t
ot
into a number of integration
periods short enough to provide adequate doppler bandwidth
and adding up filter outputs for entire time-on-target.
Click for high-quality image
PART III Radar Fundamentals
132
a video signal of single polarity, noise will no longer cancel
when integrated. Rather, it will build up throughout the
integration time in exactly the same way as the signal.
Consequently, with PDI the mean signal-to-noise ratio can-
not be increased. Nevertheless, an equivalent improvement
in detection sensitivity may be achieved. To see why, we
must look a little more closely at PDI.
Actually, PDI is nothing more than averaging. It has the
same effect as passing the video signal through a low-pass
(as opposed to bandpass) filter. You can visualize this most
clearly by thinking of the video signal as consisting of a
constant (dc) component, the amplitude of which corre-
sponds to the mean level of the signal, plus a fluctuating
(ac) component.
The amplitude of the dc component is unaltered by the
averaging, but the amplitude of the ac component is
reduced. The higher the frequency of the fluctuation and
the greater the integration time (i.e., the larger the number
of inputs averaged), the greater the reduction will be.
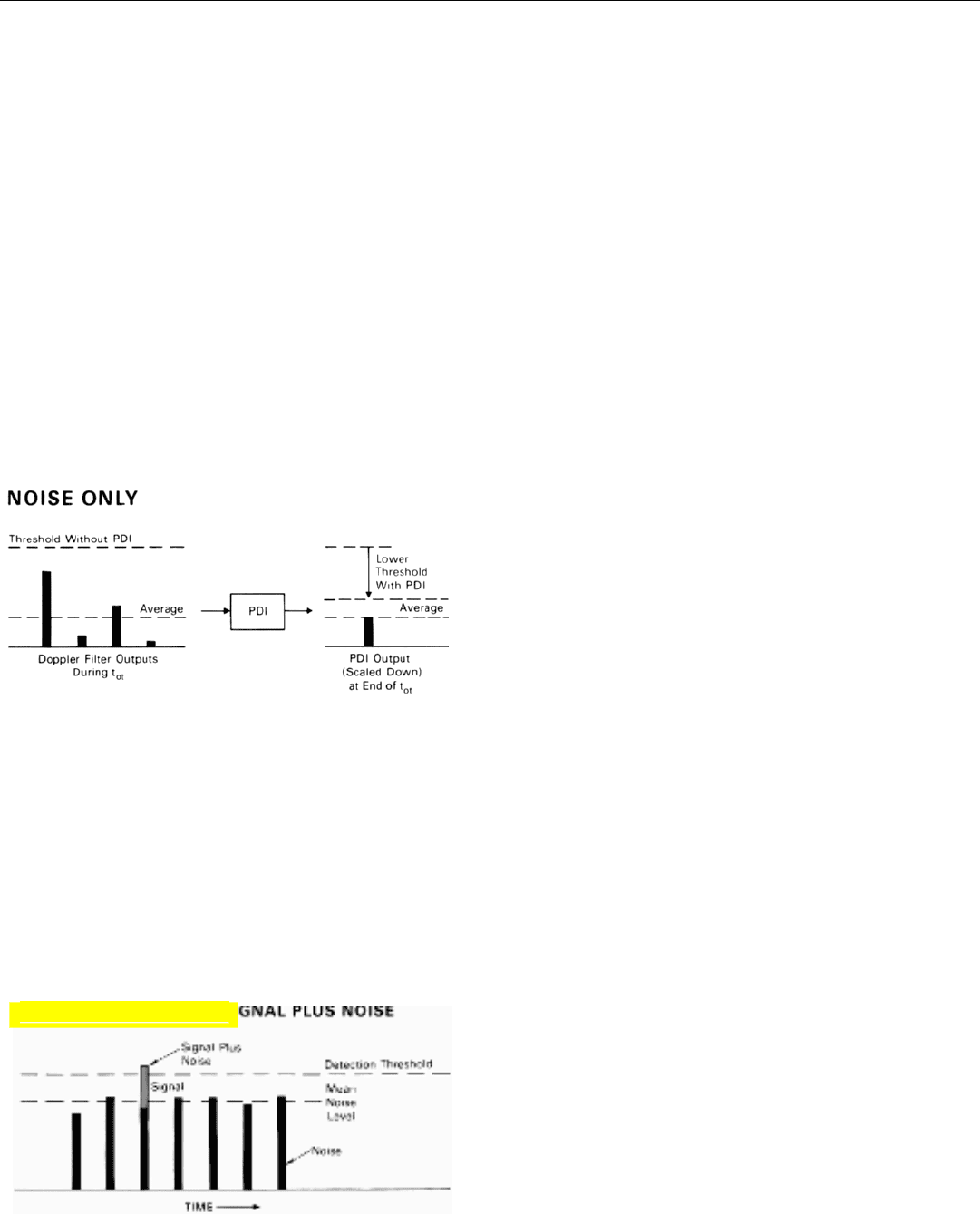
Averaging improves detection sensitivity in two important
ways.
First, it reduces the average deviation of the integrated
noise energy. Consequently, without increasing the false-
alarm probability, the target-detection threshold can be set
closer to the mean noise level (Fig. 37). The integrated sig-
nal need not be as great to cross the threshold, and the
weaker echoes of more distant targets can be detected.
The second improvement averaging makes is more sub-
tle. As we just saw, when target return is received, the inte-
grated signal is vectorially added to the integrated noise.
Because of the randomness of the noise, as often as not, the
noise will be out of phase with the signal and so will com-
bine with the signal destructively.
However, when the integrated signal plus noise is aver-
aged over many integration periods, the fluctuations due to
the noise tend to cancel out, leaving only the signal. The
possibility of missing an otherwise detectable target because
of the destructive combination of it with noise is thus great-
ly reduced.
Together, these two effects of PDI can substantially
reduce the signal-to-noise ratio required for detection. As
illustrated in Fig. 38, the fluctuations in the noise and in
the signal-plus-noise can, in the extreme, be reduced to the
point where a signal can be detected when the mean signal-
to-noise ratio is substantially less than one.
Sometimes, the equivalent of postdetection integration is
approximated by using a so-called “m out of n” detection
37. By averaging the noise outputs of a doppler filter during the
time-on-target, PDI enables the target-detection threshold to be
set much lower, without increasing the false-alarm probability.
38. The two effects of PDI allow a signal to be detected even when
the mean signal-to-noise ratio is less than one.
Click for high-quality image
criteria. If the time-on-target spans n predetection integra-
tion periods, rather than requiring only one threshold
crossing per time-on-target as a condition for detection, the
signal processor requires m crossings (Fig. 39).
The chance of isolated noise spikes producing false
alarms is thereby reduced. The detection threshold can be
lowered without increasing the false-alarm probability, and
more distant targets can be detected.
Summary
Since radio waves of the frequencies used by airborne
radars travel essentially in straight lines, a target must be
within the line of sight to be detected. Range may be fur-
ther limited by clutter or man-made interference. Ulti-
mately, it is determined by the signal-to-noise energy ratio.
The principal source of noise is thermal agitation in the
input stages of the receiver. The noise energy is commonly
expressed in terms of a figure of merit, F
n
, relating it to an
approximation of the external noise, provided by thermal
agitation in a resistor connected across the receiver’s input
terminals. In the case of low-noise receivers, external noise
sources become more significant, and noise is expressed in
terms of an equivalent “system” noise temperature.
How much energy is received from a target depends pri-
marily upon (1) the radar’s average transmitted power,
antenna gain, and effective antenna area; (2) the time-on-
target; (3) the target’s range, R, and radar cross section, σ—
a factor which accounts for the size, reflectivity, and direc-
tivity of the target.
Most radars integrate the return received as the antenna
scans across a target. If performed before video detection
(predetection integration), the integration increases the sig-
nal-to-noise ratio in direct proportion to integration time. If
performed after video detection (PDI), the integration
accomplishes two things: (1) averages out the fluctuations
in the noise, thereby reducing its peaks, and (2) averages
out the destructive combination of the noise with the sig-
nal, thereby reducing the possibility of missing an other-
wise detectable target.
For a target to be detected, the integrated signal must
exceed a threshold set high enough to keep the probability
of noise crossings acceptably low. In doppler radars, to
maintain a constant, optimum false alarm rate (CFAR), the
threshold setting of the magnitude detector for each
doppler filter’s output is based on the mean noise level in
the outputs of an ensemble of adjacent filters, as well as on
measurement of the mean noise level in the outputs of all
the filters.
CHAPTER 10 Detection Range
133
• Mean noise power = F
n
k T
0
B or k T
s
B watts
F
n
= Receiver noise figure
T
0
= Noise temperature (nominally 290° K)
k = Boltzmann’s constant
= 1.38 x 10
-23
watt-second / °K
B = Receiver bandwidth (hertz)
T
s
= System noise temperature (including
internal + external noise)
• Mean noise energy = kT
s
B t
n
t
n
= duration of the noise
• Mean noise energy =
(Matched filter)
• Mean noise energy = kT
s
(Doppler radar)
• Signal energy =
K=
1
(4π)
2
P
avg
= Average transmitted power, watts
G = Antenna gain
σ = Radar cross section of target
A
e
= Effective area of antenna
t
ot
= Time on target
R = Range
τ
k T
s
t
n
P
avg
G σ A
e
t
ot
R
4
Some Relationships To Keep In Mind
39. Sometimes the equivalent of PDI is obtained by requiring m
out of n threshold crossing in a time-on-target for a detection.
Here m = 2 and n = 8.
135
The Range Equation,
What It Does and
Doesn’t Tell Us
I
n the last chapter, we learned that within the line of
sight, in the absence of interference and competing
ground return, detection range is ultimately deter-
mined by the ratio of the energy received from a tar-
get—the signal—to the energy of the background noise.
We identified the principal factors which determine the
signal and noise energies and became acquainted with the
detection process.
Building on that knowledge, in this chapter we will
write a general equation for maximum detection range and
analyze it to see how the individual factors we have identi-
fied influence the range. We will then narrow down to the
special case of volume search. Finally, we will consider the
statistical variation in detection range and see how it is
accounted for.
General Range Equation
As we saw in the preceding chapter, when the radar
antenna is trained on a target (Fig. 1), the energy received
from the target during any one integration time is roughly
Received signal energy ≅
P
avg
GA
e
t
int
(4)
2
R
4
where
P
avg
= average transmitted power
G = antenna gain
σ = radar cross section of target
A
e
= effective antenna area
t
int
= integration time
R = range
1. Factors determining the received signal energy.
Click for high-quality image
For the target to be detected, this energy plus the accom-
panying noise energy must exceed a certain threshold
value. It is set just high enough above the mean noise level
to reduce the probability of noise peaks crossing the thresh-
old—false alarms—to an acceptably low value.
On average, the minimum energy that a signal must have
to cross the detection threshold is the difference between
the detection threshold and the mean level of the noise.
This difference (Fig. 2) is commonly represented by the
term S
min
.
Minimum detectable signal energy = S
min
Assuming perfect integration, the maximum range at
which a given target will be detected is the range at which
the received signal energy becomes equal to S
min
. Setting
the expression for signal energy equal to S
min
and solving
for range, therefore, yields a simple equation for the maxi-
mum detection range.
R
max
≅
4
P
avg
GA
e
t
int
(4)
2
S
min
(Antenna trained on target)
As it stands, the equation applies only when the antenna is
continuously trained on the target and the target is in the
center of the mainlobe, i.e., when a target is being spotlight-
ed. (Bear in mind that though the antenna may be continu-
ously trained on the target, t
int
is limited to the period of
time that the phase of the target signal remains correlated.)
In search, the maximum integration time is limited to the
time the antenna takes to sweep across the target—the
time-on-target, t
ot
. Moreover, the beam is actually centered
on the target only for an instant, if centered at all. We can
eliminate the first limitation simply by replacing t
int
with t
ot
.
Temporarily, at least, we can get around the second limita-
tion by pretending that the antenna gain is the same over
the entire solid angle encompassed by the mainlobe and
that, for the particular scan being used, the target is cen-
tered in the beam’s path (Fig. 3).
Under these conditions, the equation gives the maxi-
mum detection range for a single search scan.
R
max
≅
4
P
avg
GA
e
t
ot
(4)
2
S
min
(Single scan of antenna)
PART III Radar Fundamentals
136
2. Integrated noise energy at end of successive integration times,
t
int
. On average, for a target to be detected integrated signal
energy must equal S
min
.
3. Simple range equation can be applied to search by pretend-
ing that transmitted energy is uniformly distributed over cross
section of antenna beam and target is centered in beam’s
path.
Click for high-quality image
Incidentally, if we replace t
ot
with the pulse width, τ, and
P
avg
with the peak power, P, the equation gives the range for
single-pulse detection.
R
max
≅
4
PGA
e
(4)
2
S
min
(Single pulse: non-doppler radar)
Assuming that postdetection integration is accounted for
separately, this form of the equation applies to non-doppler
radars (Fig. 4).
Omissions. Regardless of which of these forms we use,
the equation is incomplete. Among the more obvious omis-
sions are
• Absorption and scattering in the atmosphere (Fig. 5)
• Reduction in signal energy due to the target not neces-
sarily being centered in the path of the scanning
antenna beam (this is called elevation beamshape loss)
• The further reduction in signal energy as the beam
sweeps across the target (Fig. 6) due to the fall-off in
two-way antenna gain at angles off beam center (this
is called azimuth beamshape loss)
• Losses due to imperfect IF-filter matching—some
noise being unnecessarily passed and/or some signal
energy being rejected (Fig. 7)
• Loss due to the target not necessarily being centered
in a doppler filter
• Degradation of signal-to-noise ratio due to imperfect
integration of the target return
• Effects of system degradation in the field
Nevertheless, the equation illustrates the relative contribu-
tions of what we have seen to be some of the more funda-
mental factors.
1
A More Revealing Form of the Equation. The contribu-
tion of a couple of the factors represented by terms in the
range equation can be seen more easily if we modify it
CHAPTER 11 The Range Equation: What It Does and Doesn’t Tell Us
137
4. Range equation can be applied to non-doppler radars by sub-
stituting pulse width, , for t
int
and peak power P, for P
avg
.
Postdetection integration must be accounted for separately.
5. One of the many important losses not accounted for by the
simple range equation is atmospheric attenuation.
6. Other factors not directly accounted for include possibility of
target not being centered in beam’s path and fall off in two-
way gain of the antenna at angles off beam center.
1. All omitted factors which
reduce the signal-to-noise
ratio are accounted for by
including a loss factor, L, in
the denominator.
P
τ
T
(a)
<
1
τ
(b)
>
1
τ
7. IF–filter mismatch: (a) some signal being rejected that is
stronger than accompanying noise; (b) some noise being
passed that is stronger than accompanying signal.
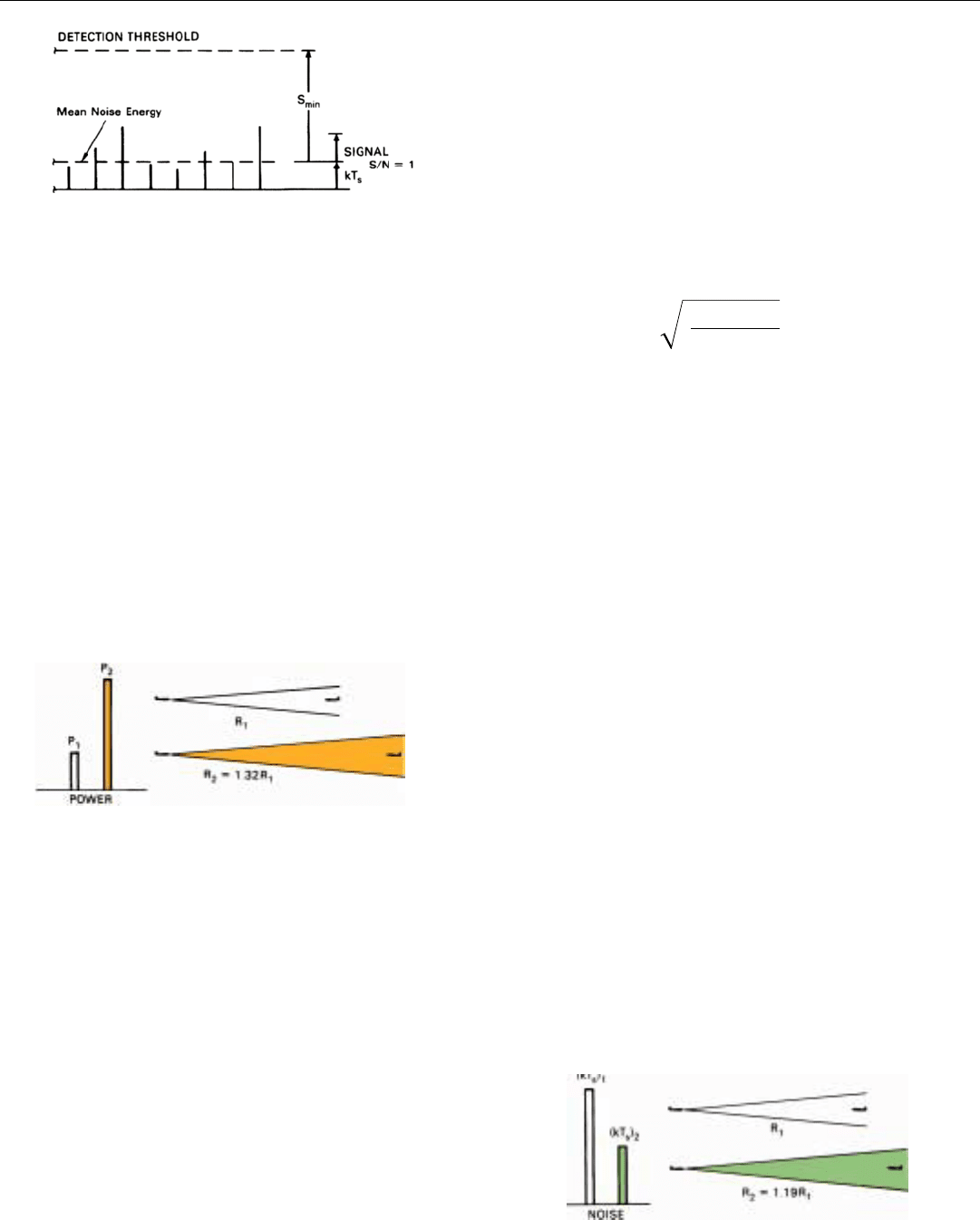
10. Decreasing system noise has the same effect on detection
range as increasing power by the same factor.
PART III Radar Fundamentals
138
9. Tripling transmitter power would increase detection range by
only 32 percent.
8. Since the detection threshold is related to mean noise level in
a complex way, detection range can be expressed in terms of
noise energy most simply by solving for the range at which the
integrated signal-to-noise ratio is one.
slightly. First, since S
min
is related in a fairly complex way to
the mean noise energy, kT
s
, if we back off from solving for
the maximum detection range and solve merely for the range
at which the integrated signal-to-noise ratio is one, we can
substitute kT
s
, directly for S
min
(Fig. 8). Second, since
antenna gain is proportional to effective antenna area divid-
ed by wavelength squared (G ∝ A
e
/λ
2
), we can consolidate
terms relating to the antenna by substituting A
e
/λ
2
for G.
With these changes, the equation for a single search scan
becomes
R
o
∝
4
P
avg
A
e
2
σt
ot
kT
s
2
(Single search scan: SNR = 1)
where R
o
is the range at which the integrated signal-to-
noise ratio (SNR) is one, is the wavelength, and the other
terms are as previously defined.
What the Range Equation Tells Us
Incomplete as it is, the equation reveals a good deal not
only about the effect of changing various parameters, but
about some of the trade-offs which must be made in
designing a radar.
Average Power. The equation tells us, for example, that
increasing the power of the transmitter by a given factor
increases the detection range by only about the fourth root
of that factor. If we were to increase the power by, say, three
times (Fig. 9), the detection range would increase by only
about 30 percent (R
2
= R
1
4
公僒3 ≅ 1.32).
Noise. At the same time, the equation tells us that
decreasing the mean level of the background noise (kT
s
) by
a given factor has the same effect as increasing the average
power by the same factor. If we could reduce the noise by
50 percent, for example, the detection range would increase
by the same amount (Fig. 10) as if we had doubled the
power, which is about 20 percent (R
2
= R
1
4
公僒2 ≅ 1.19 R
1
).
CHAPTER 11 The Range Equation: What It Does and Doesn’t Tell Us
139
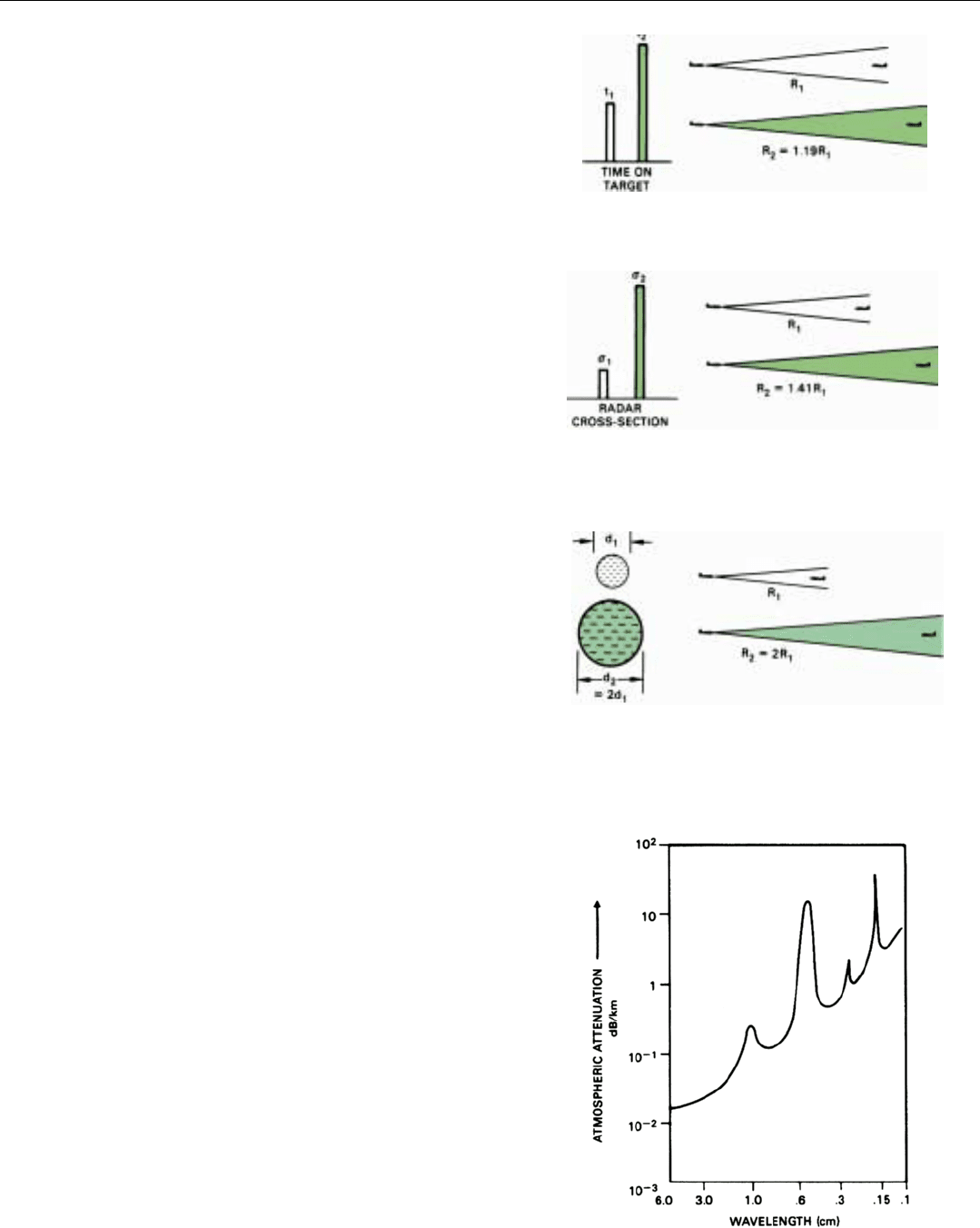
13. Doubling antenna diameter would double detection range,
provided scan was slowed to provide same time-on-target.
Time-on-Target. The equation also enables us to predict
the effect of changes in time-on-target, or integration time.
Suppose that by slowing down the scan, we were to double
the time-on-target. Provided the target return could still be
integrated, this would have the same effect as doubling the
power (Fig. 11).
Radar Cross Section. The equation further enables us to
predict the differences in the ranges at which a given radar
can detect targets of different sizes.
Suppose, for example, that the radar detects a target hav-
ing a certain radar cross section at a range of 40 miles.
Provided that the targets’ aspect and directivity remaining
the same, the radar should be able to detect a target having
four times this radar cross section (Fig. 12) at a range of
about 66 miles. (R
2
= R
1
4
公僒4 ≅ 40 x 1.41 ≅ 66)
Antenna Size. Similarly, the equation enables us to pre-
dict the effects of changes in size of the antenna. Suppose
the antenna is circular and we double its diameter.
Assuming that the aperture efficiency remains the same, this
increase would increase A
e
by 2
2
. (A
e
⬀ d
2
η.) The range
equation tells us that the increase in A
e
(Fig. 13) would
increase the range at which the radar might detect a given
target by a factor of two, R
2
= R
1
4
公僒僒僒僒(2
2
)
2
= 2R
1
, provided we
were spotlighting the target.
Doubling the antenna diameter, however, would cut the
beamwidth in half. So, if the radar was searching for targets,
we would have to slow down the antenna scan to maintain
the same time-on-target. If we didn’t, t
ot
would be cut in
half, and the range would be increased by a factor of only
about 1.68. (R
2
= R
1
4
公僒僒僒僒僒僒16 ⫻僒僒僒0.5 ≅ 1.68 R
1
)
Wavelength. Since wavelength squared is in the denomi-
nator of the equation, decreasing λ would appear to have
the same effect on the radar’s detection range as increasing
the effective area of the antenna, A
e
.
But here, an important limitation of our simple equa-
tion shows up. Depending upon what the original wave-
length was and how much we decreased it, the first order
effect of decreasing λ might be offset to a considerable
extent by such factors as increased atmospheric absorption,
one of the factors not accounted for in the equation.
Whereas the range equation indicates that decreasing the
wavelength, λ, from 3 centimeters to 1 centimeter would
increase the radar’s detection range by about 70 percent
(i.e., R
2
= R
1
4
公僒僒僒僒僒僒僒僒1/(
1
/3)
2
≅ 1.73), one look at a plot of atmos-
pheric attenuation versus wavelength (Fig. 14) tells us that
this is simply not so.
11. Doubling time-on-target would have the same effect as dou-
bling transmitter power.
12. An increase in radar cross section has the same effect as a
proportional increase in time-on-target.
14. First order effect of decreasing wavelength may be offset by
such factors as increased atmospheric attenuation.