Genshiro Kitagawa. Introduction to Time Series Modeling (Введение в моделирование временных рядов)
Подождите немного. Документ загружается.


ABRUPT CHANGES OF COEFFICIENTS 199
pressed as
p
n
( f ) =
σ
2
|A( f , n)|
2
. (13.22)
Since the characteristics of the power spectrum are determined by
the frequency r e sponse function A( f ,n), we can obtain good estimate s of
the time-varying spectru m by controlling the smoothness of A( f ,n). By
considerin g the smoothness of A( f ,n) with respe ct to n, we can obtain
the following mo dels for the change over time of the AR coefficients.
Considering the k-th difference of the A( f ,n) to evaluate the smoo thness
of the change over time of the AR coefficients, we obtain
∆
k
A( f , n) =
m
∑
j=1
∆
k
a
n j
e
−2
π
i j f
. (13.23)
Then, taking the integral of the square of ∆
k
A( f , n), we obtain
Z
1
2
−
1
2
|∆
k
A( f , n)|
2
d f =
m
∑
j=1
(∆
k
a
jn
)
2
. (13.24)
Therefore, it is possible to curtail the change over time of the power
spectrum, by reducing the sum of the squares of the k-th differences
of the AR coefficients. Since the squares of the k-th differences of the
AR coefficients add up with the same weights to each term in equation
(13.24), this is equivalent to making the natural assumption that in equa -
tion (13.10),
τ
2
11
= ··· =
τ
2
mm
=
τ
2
, (13.25)
and that
∆
k
n
a
jn
= v
n j
, v
n j
∼ N(0,
τ
2
), j = 1, ···,m. (13.26)
13.5 Abrupt Changes of Co efficients
For the seismic data shown in Figure 13.1, it can be seen that the behavior
of the wave form changes abruptly as a new sig nal arrives at a c ertain
time. In this case, the estimated time-varying coefficients o ften becom e
too variable or too smooth to capture the change of th e characteristics as
seen in Figure 13.2.
In such a case, by applying th e locally stationary AR model shown
in Chapter 8, we can obtain estimates of the change points. By using the
estimates of arrival times of a n ew signal, we may obtain better estimates
200 TIME-VARYING COEFFICIENT AR MODEL
of the time-varying AR coefficients. Abrupt changes are assumed to be
detected at times n = n
1
,.. ., n
p
. Corresponding to these points, the noise
term v
n j
of ( 13.10) takes a large negative or positive value. This indica te s
that it is necessary to increase the variance
τ
2
at the time po ints n =
n
1
,.. ., n
p
.
Precisely, when
τ
2
is incr eased in this way, the absolute value of the
k-th time-difference of a
n j
also becomes larger. Thus, for k = 1, the co -
efficient a
n j
shows a stepwise behavior and pr oduces a discontinu ous
point. On the other hand, for k = 2, the slope of a
n j
changes abruptly
and yields a bending point. To yield a jump for a mod el with k ≥ 2, it is
necessary to add noise to each component of the state vector. Therefore,
we ca n realize the jum p e ither by initializing the state and the variance-
covariance matrix x
n|n−1
and V
n|n−1
or by adding a large positive value
to all diagonal elements of V
n|n−1
for n = n
1
,.. ., n
p
. T his method is ap-
plicable to trend estimation as well as for the time-varying coefficient
modeling.
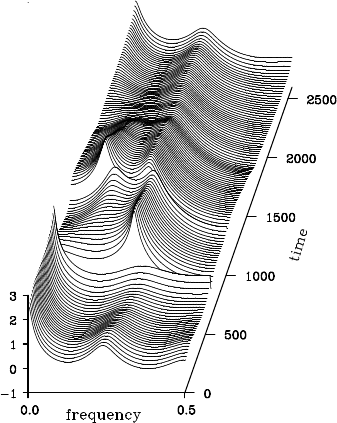
Figure 13.4 Time-varying spectrum estimated by assuming discontinuities in the
parameters.
ABRUPT CHANGES OF COEFFICIENTS 201
Example (Time-varying spectrum with abrupt structural changes)
Figure 13.4 shows the time-varying AR coefficients and the time-varying
spectrum estimated by the model with k = 2 and m = 4 and by assuming
that sudden jum ps occur at n = 630 and at n = 1026, that correspond to
the arrivals of the P-wave and the S-wave, respectively. The estimated
coefficients jump twice at those two points but change very smoothly
elsewhere.
Moreover, from Figure 13.4, we can observe two characteristics
of th e series, firstly, that the dominant frequencies gradually shift to
the right after the S-wave arrives, and secondly, that the direct current
( f = 0) component increases towards its value in the spectrum of the
backgr ound microtremors.
Problems
1. Give a n example of a heteroscedastic (variance changing over time)
time series o ther tha n earthqua ke data.
2. Co nsider a method of estimating a regression model whose coeffi-
cients change over time.
Chapter 14
Non-Gaussian State-Spa ce Mode l
In this chapter, we extend the state-space model to cases where the
system noise and/or the observation noise are non-Gaussian. This non-
Gaussian model is applicable when there are sudden changes in the pa -
rameters caused by structural changes of the system or by outliers in the
time series. For the general non-Gaussian models we consider here, it
may often be the case that w e do not obtain good estimate s of the state
by using Kalman filtering and the smoothing algorithms. E ven in such
cases, however, we can derive a similar exact sequential formula to real-
ize filtering and smoothing algorithms using numerical integration.
14.1 Necessity of Non-G aussian Models
As shown in the previous chapters, various types of time series models
can be expressed in terms of the linear-Gaussian state-space mod el
x
n
= Fx
n−1
+ G v
n
y
n
= Hx
n
+ w
n
, (14.1)
where y
n
is the time series, x
n
is the unknown state vector, and v
n
and w
n
are Gaussian white noises.
The state-space model is a very useful tool for time series modeling,
since it is a natural representation of a time series model and provides us
with very efficient computational methods, such as Kalman filtering and
smoothing algorithm s. Although many impo rtant time series models are
expressible as linear-Gaussian state-space models, there are some other
situations where extensions of the model are nec essary, such as the case
of a nonstationary tim e series with time-varying stochastic structure that
sometimes contains both smooth an d abr upt changes. Although a linear-
Gaussian state-space mode l c an reason a bly express gradu a l structural
changes of nonstationary time series, it is necessary to build a complex
model to properly address abrupt ch anges. To remove the influenc e of
outliers in the da ta , development of an automatic detection method for
203
204 NON-GAUSSIAN STATE-SPACE MODEL
the ou tliers a nd a robust estimation procedu re is necessary (West (1981),
Meinhold and Singpurwalla (1989) and Carlin et al. (1 992)). In addition,
nonlinear systems and discrete proce sses cannot be ad equately modeled
by standard linear Gaussian state-space models.
Let us consider possible solutions to these problems. In state-space
modeling, changes in the stochastic structure are often reflected by
changes in the state. Assuming a heavy-tailed distribution such as the
Cauchy distribution for the system noise v
n
, both smooth changes that
occur with high probability and abrupt cha nges that oc cur with low prob-
ability can be expressed by a single noise distribution.
Similarly, it is reasonable to deal with outliers in time series by us-
ing a heavy-tailed distribution for the observation noise w
n
. On the other
hand, if the system contains nonlinea rity or if the observations are dis-
crete values, the distribution of the state vector inevitably becomes non-
Gaussian.
Therefore, as a key to the solution of problems that occur with
standard state-space modeling, a treatment of non-Gaussian state dis-
tributions is essential. In the following sections, the recursive filter and
smoothing algorithms for the estimation of the unknown states of n on-
Gaussian state-space models an d their applications a re presented.
14.2 Non-Gaussian State -Space Models and State Estimation
Consider the following state-sp a ce model
x
n
= Fx
n−1
+ Gv
n
(system mod e l) (14.2)
y
n
= Hx
n
+ w
n
(observation model) (14.3)
where the system noise v
n
and the observation no ise w
n
are white noises
that follow the density functions q(v) and r(w), respe c tively. In contrast
to the state-space models presented in the previous chapters, these distri-
butions are not necessarily Gaussian.
In this case, the distribution of the state vecto r x
n
generally becomes
non-Gaussian. Consequently, the state-sp ace model of equations (14.2)
and (14.3) is called a non-Gaussian state-space model. Clearly, this non-
Gaussian state-space model is an extension of the standard state-sp ace
model.
As in Chapter 9, the information from the time series obtained by
time j is denoted as Y
j
≡ {y
1
,.. ., y
j
}. Similarly, the set of re alizations
of the state x
n
up to tim e j is denoted as X
j
≡ {x
1
,.. ., x
j
}. Further, the
initial state vector x
0
is assumed to be distributed accor ding to the prob-
ability density function p(x
0
|Y
0
). Here, the state estimation problem is
STATE ESTIMATION 205
to obtain the conditional distribution of the state vector x
n
, given the in-
formation Y
m
. There are three versions of the state estimation problem,
depending on the r e la tion between n and m. Specifically, for n > m, n = m
and n < m, it is called the prediction pro blem, the filtering problem and
the smoothin g problem, respe ctively.
For the linear-Gaussian state-space mode l, the Kalman filter provides
a recursive algorithm for obta ining the con ditional mean and the condi-
tional variance-covariance matrix of the state vector. On the other hand,
with the general non-Gaussian state-space model, it is necessary to ob-
tain the conditio nal densities for state estimation.
However, f or the state-space models defined by (14.2) and (14.3), by
using the relations p(x
n
|x
n−1
,Y
n−1
) = p(x
n
|x
n−1
) and p(y
n
|x
n
,Y
n−1
) =
p(y
n
|x
n
), we can derive recu rsive formulas for obtaining the one-step-
ahead predictive distribution p(x
n
|Y
n−1
) and the filtering distribution
p(x
n
|Y
n
) as follows (Kitagawa (1987)). No te that the fo llowing algorithm
can be applied to general nonline a r state-space model (Kitagawa (1991),
Kitagawa and Gersch (1996)).
[ One-step-ahead prediction ]
p(x
n
|Y
n−1
) =
Z
∞
−∞
p(x
n
,x
n−1
|Y
n−1
)dx
n−1
=
Z
∞
−∞
p(x
n
|x
n−1
,Y
n−1
)p(x
n−1
|Y
n−1
)dx
n−1
=
Z
∞
−∞
p(x
n
|x
n−1
)p(x
n−1
|Y
n−1
)dx
n−1
, (14.4)
[ Filtering ]
p(x
n
|Y
n
) = p(x
n
|y
n
,Y
n−1
)
=
p(y
n
|x
n
,Y
n−1
)p(x
n
|Y
n−1
)
p(y
n
|Y
n−1
)
=
p(y
n
|x
n
)p(x
n
|Y
n−1
)
p(y
n
|Y
n−1
)
, (14.5)
where p(y
n
|Y
n−1
) is obtained as
Z
p(y
n
|x
n
)p(x
n
|Y
n−1
)dx
n
. The one- step-
ahead prediction formula (14.4) is an extension of the one-step-ahead
prediction of the Kalman filter. He re, p(x
n
|x
n−1
) is the density function
of the state x
n
when the previous state x
n−1
is given, which is deter-
mined by the system model (14. 2). Ther e fore, if the filter p(x
n−1
|Y
n−1
)
of x
n−1
is given, the one-step-ahead predictor p(x
n
|Y
n−1
) can be evalu-
ated. On the other hand, the filter formula (14.5) is an extension of the
206 NON-GAUSSIAN STATE-SPACE MODEL
filtering step of the Kalman filter. p(y
n
|x
n
) is the conditional distribu-
tion of the observation y
n
, when the state x
n
is given. It is determined by
the ob servation model of (14.3). Therefore, if the predictive distribution
p(x
n
|Y
n−1
) of x
n
is given, then the filter density p(x
n
|Y
n
) is comp utable.
Next, we consider the smoothing proble m. Using the equation
p(x
n
|x
n+1
,Y
N
) = p(x
n
|x
n+1
,Y
n
) that h olds for the state-space models of
(14.2) and (14 .3), we obtain
p(x
n
,x
n+1
|Y
N
) = p(x
n+1
|Y
N
)p(x
n
|x
n+1
,Y
N
)
= p(x
n+1
|Y
N
)p(x
n
|x
n+1
,Y
n
)
= p(x
n+1
|Y
N
)
p(x
n
|Y
n
)p(x
n+1
|x
n
,Y
n
)
p(x
n+1
|Y
n
)
= p(x
n+1
|Y
N
)
p(x
n
|Y
n
)p(x
n+1
|x
n
)
p(x
n+1
|Y
n
)
. (14.6)
Integration of both sides of ( 14.6) yields the following sequential for-
mula for the smooth ing problem:
[ Smoothing formula ]
p(x
n
|Y
N
) =
Z
∞
−∞
p(x
n
,x
n+1
|Y
N
)dx
n+1
= p(x
n
|Y
n
)
Z
∞
−∞
p(x
n+1
|Y
N
)p(x
n+1
|x
n
)
p(x
n+1
|Y
n
)
dx
n+1
. (14.7)
In the right-hand side of the formula (14.7), p(x
n+1
|x
n
) is determined by
the system model (14.2). On the other hand, p(x
n
|Y
n
) and p(x
n+1
|Y
n
) are
obtained by equations ( 14.4) and (14.5), respectively. Thu s, the smooth-
ing formula (14.7) indicates that if p(x
n+1
|Y
N
) is given, we can co mpute
p(x
n
|Y
N
).
Since p(x
N
|Y
N
) can be obtained by filtering (14.5), by re peating the
smoothing for mula (14.7) for n = N −1,...,1 in a similar way as for
the fixed interval smoothing presented in Chapter 9, we can obtain the
smoothing distributions p(x
N−1
|Y
N
),... , p(x
1
|Y
N
), successively.
14.3 Numerical Computation of the St ate Estimation Formula
As shown in the previous section, we can derive recursive estimation
formu las for the non-Gaussian state-space model that are natural exten-
sions of the Kalman filter. Adopting this compreh ensive a lgorithm, we
can extensively treat various types of time series mo dels. However, in
NUMERICAL COMPUTATION 207
the practical application of the algo rithm, difficulties often arise in cal-
culating the formulas of the filter and smoother.
For a linear Gau ssian state-space model, all the conditional dis-
tributions p(x
n
|Y
n−1
), p(x
n
|Y
n
) and p(x
n
|Y
N
) become normal distribu-
tions. Therefore, in that case, only the mean vectors and the variance-
covariance matrices need to be evaluated, and correspondingly (14.4),
(14.5) and (14.7) become equivalent to the ordinary Kalman filter and
the smooth ing algorithms. However, since the conditional distribution
p(x
n
|Y
j
) of the state generally beco mes a non-Gau ssian distribution,
it cannot be specified using only the mean vector and the variance-
covariance matrix. Various algorithms have been presented, for instance,
the extended Kalman filter (Anderson and Moore (1979)) and the sec-
ond order filter, to appr oximate the non -Gaussian distribution by a sin-
gle Gaussian distribution with properly determin ed me an vector and
variance-covariance matrix. In general, however, they do not perform
well.
This section deals with the method of realizing the non-Gaussian fil-
ter an d the non-Gaussian smoothin g algorithm by numerically approx-
imating the non-Gaussian distributions (Kitagawa (1987)). In this ap-
proach , a non-Gaussian state density function is a pproximated numer-
ically using functions such as a step function , a piecewise linear f unc-
tion or a spline. Then, the formulas (14.4)–(14.7) can be evaluated by
numerical computa tion. Since this approach requires a huge am ount of
computation, it used to be considere d an impractical method. Nowadays,
with the development of high-speed com puters, those numerical meth-
ods have beco me practical, at least f or the low-dimensional systems.
In this section, we approximate the density functions that appeared in
(14.4), (14.5) and (14.7) by simple step functions (Kitagawa and Gersch
(1996)).
To be specific, the de nsity function f (t) to be approximated is de-
fined on a line: −∞ < t < ∞. To approximate th is density functio n by
a step function, the domain o f the density function is firstly restricted
to a finite interval [t
0
,t
d
], which is then divided into d sub-intervals
t
0
< t
1
< ··· < t
d
. Here, t
0
and t
d
are assumed to be sufficiently small
and large nu mbers, respe ctively, and for simplicity, the width of the
sub-intervals is assumed to be identical. Then the i-th point is given by
t
i
= t
0
+ i∆t with ∆t = (t
d
−t
0
)/d. In the actual programming of the ends
of the sub-intervals, however, t
0
and t
i
change, adapting to changes in
the location of the density fun ction. For simplicity, however, ends of th e
sub-intervals are assumed to be fixed in the following.
In a step-function appro ximation, the f unction f (t) is approximated
208 NON-GAUSSIAN STATE-SPACE MODEL
Table 14.1: Approximation of density functions.
density fun ction approximation denotation
p(x
n
|Y
n−1
) {d;t
0
,···,t
d
; p
1
,···, p
d
} ˜p(t)
p(x
n
|Y
n
) {d;t
0
,···,t
d
; f
1
,···, f
d
}
˜
f (t)
p(x
n
|Y
N
) {d;t
0
,···,t
d
;s
1
,···, s
d
} ˜s(t)
q(v) {2d + 1;t
−d
,···,t
d
;q
−d
,···, q
d
} ˜q(v)
by f
i
on the sub-interval [t
i−1
,t
i
]. If the function f (t) is actually a step-
function, it is given by f
i
= f (t
i
). But in general, it may be define d by
f
i
= ∆t
Z
t
i
t
i−1
f (t)dt. (14.8)
Using those values, the step-fu nction approximation o f the function
f (t) is specified by {d;t
0
,.. .,t
d
; f
1
,.. ., f
d
}. I n the fo llowing, the a p-
proxim ated function is denoted by
˜
f (t). For the numerical imp le men-
tation of the non-Gaussian filter and the smoothing formula, it is neces-
sary to approximate the density functions p(x
n
|Y
n−1
), p(x
n
|Y
n
), p(x
n
|Y
N
)
and the system n oise density q(v) as shown in Table 14.1. Here, it is
clear that we should u se the observation noise de nsity r(v) directly,
without discretizing it. Alterna tive approaches for numerical integrations
are Gauss-Hermite polynomial integration (Schnatter (1992)), a r a ndom
replacement of knots spline function approximation (Tanizaki (1993))
and Monte Carlo integration (Carlin et al. (1992), Fr¨uhwirth-Schnatter
(1994), Carter and Kohn (1993)).
In the following, we show a procedure for numerical evaluation of
the simplest one -dimensional trend model:
x
n
= x
n−1
+ v
n
,
y
n
= x
n
+ w
n
. (14.9)
[ One-step-ahead prediction ]
For i = 1,... ,d, compute
p
i
= ˜p(t
i
) =
Z
t
d
t
0
˜q(t
i
−s)
˜
f (s)ds
=
d
∑
j=1
Z
t
j
t
j−1
˜q(t
i
−s)
˜
f (s)ds