Genshiro Kitagawa. Introduction to Time Series Modeling (Введение в моделирование временных рядов)
Подождите немного. Документ загружается.

AUTOMATIC PARTITIONING OF THE TIME INTERVAL 129
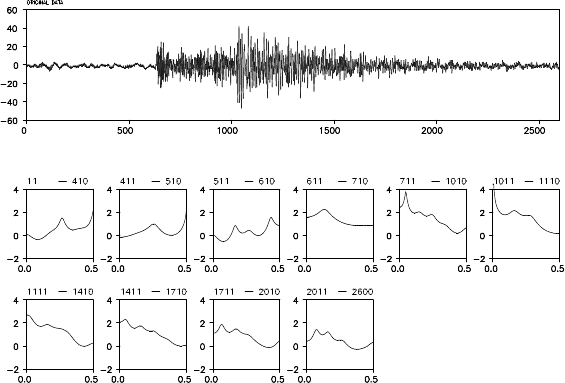
Figure 8.1 The east-west component record of seismic wave and estimated spec-
tra obtained by a locally st ationary AR model.
Therefore, by finding the minimum (over j) of AIC
P
( j), thus,
AIC
P
≡ min
j
AIC
P
( j), (8.21)
we obtain the AIC value for th e AR model, which was obtained unde r
the assumption that the structural change did not occur at time n
k1
+ 1.
In step 5, replace the matrix S with the matrix T if AI C
D
< AIC
P
or
with the matrix R if AIC
D
≥ AIC
P
. Then go ba ck to step 3.
Example (Locally stationary modeling of seismic dat a) Figure 8.1
shows the results of fitting a loca lly stationary AR model to the east-
west component of a seismogram (N = 2600) with L = 100 and m = 10
(Ta kanami and Kitagawa (1991)). The record involves micro tremors as
the noise and two types of seismic wave; the P-wave and the S-wave. The
power sp ectra shown in the figures are obtained from AR models esti-
mated on the decided stationary subintervals. Structural chan ges have
been detected at nine points, n =410, 510, 610, 710 , 1010, 1110, 1410,
1710 and 2010. The chan ge around n = 6 00 corre sponds to a change in
the sp ectrum and the variance caused by the arrival of the P-wave. The
section n = 600 −10 00 corresponds to the P-wave. Whereas the spec-
trum during n = 600 −700 contains a single strong periodic component,
130 THE LOCALLY STATIONARY AR MODEL
various p eriodic components with different periods are intermingled dur-
ing the latter half of the P-wave, n = 7 00 −1000. The S-wave appears
after n = 10 00. We can see not only a de c rease in power due to the re-
duction of the amplitude but also that the main p eak shifts from the low
frequency ran ge to the high frequency range. After n = 2000, no signifi-
cant change in the spectrum could be detected.
8.3 Precise Estimation of a Change Point
In the previous sections, we have presented a meth od of automatically
dividing the time inter val of a nonstationary time series into several
subintervals in which the time series could be regarded as stationary.
Here, we consider a method of detecting the precise time of a structural
change by assuming that a structural change of the time series y
n
oc-
curred within the time interval [n
0
,n
1
]. A multivariate extensio n of this
method is shown in Takanami and Kitagawa (1991).
Assuming that the structural change occurred at time n ; n
0
≤ n ≤ n
1
,
a different AR model is fitted to each subinterval [1,n −1] and [n,N],
respectively. Then the sum of the two AIC values of the AR models fitted
to these time series yields the AIC value of a locally stationary AR model
with a structural ch a nge at time n. To obtain a precise estimate of the time
of structural change based on the locally stationary AR mod e ls, we could
compute the AICs for all n suc h that n
0
≤ n ≤ n
1
to find the minimum
value. With this me thod, bec a use w e have to estimate AR models for all
n, a huge amount of computation is required. However, we can derive
a computationally very efficient procedure for obtaining the AIC values
for all the locally stationary AR models by using the method of data
augmen ta tion shown in Section 5.4.
According to this procedure, from the time series y
1
,···, y
n
0
, we first
construct an (n
0
−m) ×(m + 1) matrix
X
0
=
y
m
··· y
1
y
m+1
.
.
.
.
.
.
.
.
.
.
.
.
y
n
0
−1
··· y
n
0
−m
y
n
0
, (8.22)
and reduce it to u pper triangular form by a Householder transf ormation:
H
0
X
0
=
S
O
=
s
11
··· s
1m
s
1,m+1
.
.
.
.
.
.
.
.
.
s
mm
s
m,m+1
s
m+1,m+1
O
. (8.23)

PRECISE ESTIMATION OF A CHANGE POINT 131
Then, th e AIC value for the AR model of order j fitted to the time
series y
1
,···, y
n
0
is obtained by
ˆ
σ
2
0
( j) =
1
n
0
−m
m+1
∑
i= j+1
s
2
i,m+1
, (8.24)
AIC
0
( j) = (n
0
−m) log
ˆ
σ
2
0
( j) + 2( j + 1). (8.25)
Therefore, on the assumption that a structural ch a nge occurred at time
n
0
+ 1, the AIC value for the best AR model on the first part of the
interval is given by
AIC
1
0
≡ min
j
AIC
0
( j). (8.26)
To obtain the AIC value for the AR model fitted to the augmented
data y
1
,···, y
n
0
+p
, where p is the numb er of additional data points (p ≥
1), w e construct an (m + p + 1) ×(m + 1) matrix X
1
by augmenting the
upper triangular matrix obtained in the previous step with the new data
X
1
=
s
11
··· s
1m
s
1,m+1
.
.
.
.
.
.
.
.
.
s
mm
s
m,m+1
s
m+1,m+1
y
n
0
··· y
n
0
−m+1
y
n
0
+1
.
.
.
.
.
.
.
.
.
y
n
0
+p−1
··· y
n
0
−m+p
y
n
0
+p
, (8.27)
and reduce it to upper triangular fo rm by an appropriately define d House-
holder transformation H
1
:
H
1
X
1
=
R
O
=
r
11
··· r
1m
r
1,m+1
.
.
.
.
.
.
.
.
.
r
mm
r
m,m+1
r
m+1,m+1
O
. (8.28)
The AIC value for the AR model of order j fitted to the augmented
data y
1
,···, y
n
0
+p
is obtained by
ˆ
σ
2
1
( j) =
1
n
0
−m + p
m+1
∑
i= j+1
r
2
i,m+1
,
AIC
1
( j) = (n
0
−m + p)log
ˆ
σ
2
1
( j) + 2( j + 1). (8.29)
132 THE LOCALLY STATIONARY AR MODEL
Therefore, under the assumption that the structural change occurred at
time n
0
+ p + 1, the AIC value for the best AR model for the first-half
interval is obtained by
AIC
1
1
≡ min
j
AIC
1
( j). (8.30)
Repeating this procedure, the AIC values for the A R models fitted
to the time series {y
1
,···, y
n
0
}, {y
1
,···, y
n
0
+p
},···,{y
1
,···, y
n
1
}; i.e.,
AIC
1
0
, AIC
1
1
,···, AIC
1
ℓ
can be obtain e d.
The AI C values for the AR models after the structural change
can similarly be obtained. With respect to the AICs of the latter-half
AR models, we first fit AR models to the data y
n
1
+1
,···, y
N
and then
augmen t with p observations successively; i.e., we fit AR models to
{y
n
1
+1
,···, y
N
},{y
n
1
−p+1
,···, y
N
},{y
n
1
−2p+1
,···, y
N
},···,{y
n
0
+1
,···, y
N
}
and compute the AIC values for the models, AIC
2
ℓ
, AIC
2
ℓ−1
,···, AIC
2
0
.
Then,
AIC
j
= AIC
1
j
+ AIC
2
j
(8.31)
yields the AIC value for the locally stationary AR model on the assump-
tion that the structural chang e occurred at time n
0
+ jp + 1. Therefor e,
we can estimate the time point of structural change by finding the j for
which the minimum of AIC
0
,···, AIC
ℓ
is attained.
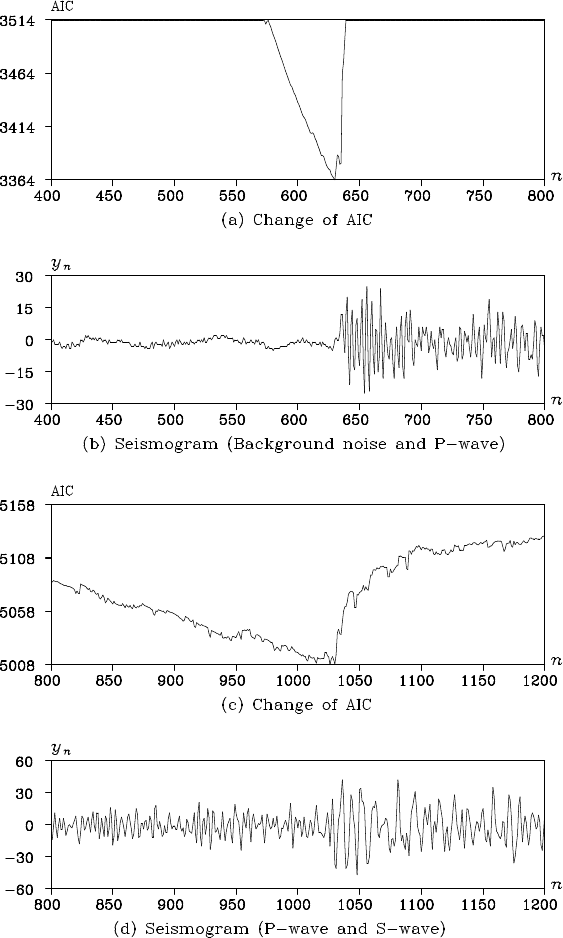
Example (Estimation of the arrival times of P-wave and S-wave)
Figure 8.2 shows the results of precisely examining the change points
around n = 600 and n = 1000 , where the substantial changes are seen
in Figure 8.1. Plot (b) shows the enlarged part of n = 400 −800 where
the first half might be considered as the microtremors a nd the latter half
might be the P-wave. In plot (a), the value of AIC obtained by (8.31)
is shown and th e minimum value 3364 attaine d at n = 630. Accord-
ingly, it can be inferred that the P-wave arrived at a time corresponding
to n = 630.
Plot (d) shows the enlarged part o f n = 800 −1200 and the first and
the latter half of the plot are the P-wave and the S-wave, respectively.
From the value of AIC shown in plot ( c ), we can infer that the S-wave
arrived at a time correspond ing to n = 1026. In plot (a), the AIC has
a clear minimum and the estimate of the arrival tim e is very accura te ,
whereas plot (c) shows a gradual change in the AIC and the detection of
the arrival time of S-wave is correspondingly rather more difficult than
that of the P-wave.
PRECISE ESTIMATION OF A CHANGE POINT 133
Figure 8.2: Estimation of the arrival times of the P-wave and the S-wave.

134 THE LOCALLY STATIONARY AR MODEL
Problems
1. In locally stationary AR modeling, what kind of model should we use
if the mean of the time series changes over time. State the expression
of the AIC fo r that model.
2. Co rresponding to the time series shown in Figure 1.2, consider a lo-
cally stationary AR model for the situation where only th e variance
of the time series changes over time.
3. Ref e rring to the polynomial regression model introduced in Chapter
11, obtain the AIC of the model in which the polynomial changes
over time.
4. In Problem 2, consider mo dels tha t r eflect the continuity or the
smoothne ss of the tre nd.
5. Assuming that the Householder transformations for (8.22) and (8.27)
need
1
2
n
0
m
2
and
1
2
(p + 1)m
2
computations, compare the am ount of
computation requir ed for an ordinary AR model and the lo cally sta-
tionary AR m odel presented in Section 8.3.
Chapter 9
Analysis of Time Series with a
State-Space Model
Various models used in time series analysis can be treated entirely within
the state-space model framework. Many problem s of time series analysis
can be formulated in terms of th e state estimation of a state-space model.
This chapter presents algorith ms for the Kalman filter and a smoothing
algorithm for efficient state e stima tion. In ad dition, applications to the
increasing horizon prediction, in terpolation and parameter estimation of
a time series are d ealt with.
9.1 The State -Space Model
It is assumed that y
n
is an ℓ-variate time series. The following model for
the time series is called a state-space model.
x
n
= F
n
x
n−1
+ G
n
v
n
, (system model) ( 9.1)
y
n
= H
n
x
n
+ w
n
, (observation model), (9.2 )
where x
n
is a k -dimensional unobservable vector, referred to as the state
(Anderson and M oore (1979)). v
n
is a system noise or a state noise, that
is, an m -dimensional white n oise with mean vector zero and variance-
covariance matrix Q
n
. On the other hand, w
n
is called observation noise;
it is assumed to be an ℓ-dimensional Gaussian white noise with mean
vector zero and the variance-covariance matrix R
n
. F
n
, G
n
and H
n
are
k ×k, k ×m and ℓ ×k matrices, respectively. Many linear models used in
time series analysis are expressible in terms of state-sp ace models.
With respect to the concept of the state-sp a ce model, it has the fol-
lowing two interpretations. First, if we consider the observation model
of (9.2) as a regression model that expresses a mechanism for obtaining
the time series y
n
, then the state x
n
correspo nds to the regression coeffi-
cients. In this case, the system model (9.1) expresses the tim e -change of
the regression coefficients.
On the other hand, on the assumption that x
n
is considered as the un-
135
136 ANALY SIS OF TIME SERIES WITH A STATE-SPACE MODEL
known signal, the system model expresses the generation mec hanism of
the signal, and the observation mod el expresses the structure of the actu-
ally observed signal, which was obtained by constructin g a tra nsformed
signal, contam inated by an additive no ise.
Example (State-space representation of an AR model) Here , we
shall consider an AR m odel f or the time series y
n
y
n
=
m
∑
i=1
a
i
y
n−i
+ v
n
, (9.3)
where a
i
is the AR c oefficient and v
n
is a Gaussian w hite noise with
mean zero and variance
σ
2
.
Then, if the state vector is defined as x
n
= (y
n
,y
n−1
,···, y
n−m+1
)
T
, it
can easily be verified that the re is a relation between the two states, x
n
and x
n−1
:
x
n
= Fx
n−1
+ Gv
n
. (9.4)
Here, F and G are the m×m matrix and th e m dimensional vector defined
by
F =
a
1
a
2
··· a
m
1
.
.
.
1 0
, G =
1
0
.
.
.
0
, (9. 5)
respectively.
On the other hand, since the first component of the state x
n
is the
observation y
n
, by putting H = [ 1 0 ··· 0 ], we obtain the observation
model
y
n
= Hx
n
. (9.6)
Furthermore, assign ing Q =
σ
2
and R = 0 to the variances of the sys-
tem noise and the observation noise, respectively, a state-space model
representation of the AR model can be obtained. Thus, the AR model
is a special form of the state-space model, in that the state vector x
n
is
completely d etermined by the observations until time n, and then the ob-
servation noise b ecomes zero.
It should be noted he re that representation in terms of the state-space
model is no t unique. For example, given the state-space models (9.1)
and ( 9.2), for any no n-singular matrix T , by defining a new state z
n
, the
matrix F
′
n
and the vectors G
′
n
and H
′
n
by
z
n
= T x
n
, F
′
n
= T F
n
T
−1
, G
′
n
= T G
n
, H
′
n
= H
n
T
−1
, (9.7)
THE STATE-SPACE MODEL 137
we obtain a state-space model equivalent to the models (9 .1) and (9.2):
z
n
= F
′
n
z
n−1
+ G
′
n
v
n
y
n
= H
′
n
z
n
+ w
n
.
Next, we define the state as
x
n
= (y
n
, ˜y
n+1|n−1
,···, ˜y
n+m−1|n−1
)
T
,
where ˜y
n+i|n−1
=
∑
m
j=i+1
a
j
y
n+i−j
expresses the part of the one-step-
ahead predictor y
n+i|n−i+1
=
∑
m
j=1
a
j
y
n+i−j
of y
n+i
, that can be deter-
mined by the observations up to time n −1. Here, we define F, G and H
by
F =
a
1
1
a
2
.
.
.
.
.
. 1
a
m
0
, G =
1
0
.
.
.
0
, H = [1 0 ··· 0 ], (9.8)
and, consequently, we obtain another expression of the AR model.
In general, many of the models treated in this book, such as the
ARMA mode l, the trend com ponent model and the seasonal component
model, can be expressed in the form
F
i
=
a
1i
1
a
2i
.
.
.
.
.
. 1
a
mi
0
, G
i
=
1
b
1i
.
.
.
b
m−1,i
, (9.9)
H
i
= [ c
1i
c
2i
··· c
m,i
].
In a ctual time series analysis, a synthetic model that consists of
p components may be used. If the dimensio ns of the p states are
m
1
,···, m
p
, r e spectively, with m = m
1
+ ···+ m
p
, th en by defining an
m ×m matrix, an m × p matrix and an m vector
F =
F
1
.
.
.
F
p
, G =
G
1
.
.
.
G
p
, H = [ H
1
··· H
p
],
(9.10)
a state-space model of the time series is obtained. In this book, this state-
space model is used as the standard form.
138 ANALY SIS OF TIME SERIES WITH A STATE-SPACE MODEL
9.2 State Estimation via the Kalman Filter
A particularly impor tant problem in state-sp a ce modeling is to estimate
the state x
n
based on the o bservations of the time ser ie s y
n
. The reason
is that tasks such a s prediction, interpolatio n a nd likelihood computa-
tion for the time series can be systematically analyzed by usin g the state
estimation.
In this section, we shall consider the problem of estimating the state
x
n
at time n based on the set of observations Y
j
= {y
1
,···, y
j
}. In particu-
lar, for j < n, the state estimation problem is equivalent to estimation of
the future state b ased on the present and past observations an d is called
prediction. For j = n, the problem is to estimate the current state, which
is called a filter. On the other hand, for j > n, the prob le m is to estimate
a past state x
j
based on the observations until the present time and this is
called smoothing.
A gener al approach to these state estimation problems is to obtain
the conditional distribution p (x
n
|Y
j
) of the state x
n
. Then, as the state-
space model defined by (9.1) and (9.2) is a linear model, and moreover
the no ises v
n
and w
n
, and the initial state x
0
follow normal distributions,
all these conditional distributions become normal distributions. There-
fore, to solve the pro blem of state estimation of the state-space model, it
is sufficient to obtain the mean vectors and the variance-covariance ma-
trices of the co nditional distributions. In general, in order to obtain the
conditional joint distribution of states x
1
,···, x
n
given the observations
y
1
,···, y
n
, a hug e amount of computation is necessary.
However, for the state-space model, a very computationally efficient
proced ure for obtaining the joint conditional distribution of the state
has been developed by means of a recursive co mputational algorithm.
This a lgorithm is known as the Kalman filter (Kalman ( 1960), Anderson
and Moore (1976)). In the following, the c onditional expectation and the
variance-covariance matrix of the state x
n
are denoted by
x
n|j
≡ E
x
n
|Y
j
V
n|j
≡ E
(x
n
−x
n|j
)(x
n
−x
n|j
)
T
. (9.11)
It is noted that only the cond itional distributions with j = n −1 (one-
step-ahead prediction) and j = n (filter) are treated in the Kalman filter
algorithm . As shown in Figure 9.1, the Kalman filter could be realized by
repeating the one-step-ahead prediction and the filter with the following
algorithm . The derivation of the Kalman filter is shown in Appendix C.