Ещин Е.К. Моделирование систем управления электромеханическими объектами
Подождите немного. Документ загружается.

21
.Cells(1, K) = Y0(K)
Next K
End With
x = X0
While x <= Xk
Runge (x)
For i = 1 To N: Yz(i) = Y(i): Next i
h = h / 2
Runge (x)
For i = 1 To N: Y0(i) = Y(i): Next i
x = x + h
Runge (x)
L = 0
For i = 1 To N
If Abs(Yz(i) - Y(i)) < eps * Abs(Yz(i)) Then
L = L + 1
End If
Next i
If L = N Then
With Worksheets("Лист3")
For K = 1 To N
.Cells(j, K) = Y(K)
Y0(K) = Y(K)
Y0z(K) = Y(K)
Next K
End With
x = x + h
h = Hz
j = j + 1
Else
x = x - h
End If
Wend
End Sub
'============================================================
Sub Uravnen()
' Правые части уравнений движения АД для синхронной системы
' координат вместе с уравнением движения электропривода
F(1)=537-Rs/lps*Y(1)+Rs/lps*kr*Y(3)+314*Y(2)
F(2)=-Rs/lps*Y(2)+Rs/lps*kr*Y(4)-314*Y(1)
F(3)=-Rr/lpr*Y(3)+Rr/lpr*ks*Y(1)+(314-p*Y(5))*Y(4)
F(4)=-Rr/lpr*Y(4)+Rr/lpr*ks*Y(2)-(314-p*Y(5))*Y(3)
F(5)=4*c*(Y(3)*Y(2)-Y(1)*Y(4))/GD2
End Sub
'===========================================================
' Процедура, реализующая метод Рунге-Кутта 4-го порядка
Sub Runge(x As Single)
x=X0
For i=1 To N: Y(i)=Y0(i): Next i: Uravnen
For i=1 To N: k1(i) = h * F(i): Next i
22
x = X0 + h / 2
For i=1 To N: Y(i)=Y0(i)+k1(i)/2: Next i: Uravnen
For i=1 To N: k2(i) = h * F(i): Next i
For i=1 To N: Y(i)=Y0(i)+k2(i)/2: Next i: Uravnen
For i=1 To N: k3(i) = h * F(i): Next i
x = X0 + h
For i=1 To N: Y(i)=Y0(i)+k3(i): Next i: Uravnen
For i=1 To N: k4(i) = h * F(i): Next i
For i = 1 To N
Y(i)=Y0(i)+(k1(i)+2*k2(i)+2*k3(i)+k4(i))/6
Next i
End Sub
'============================================================
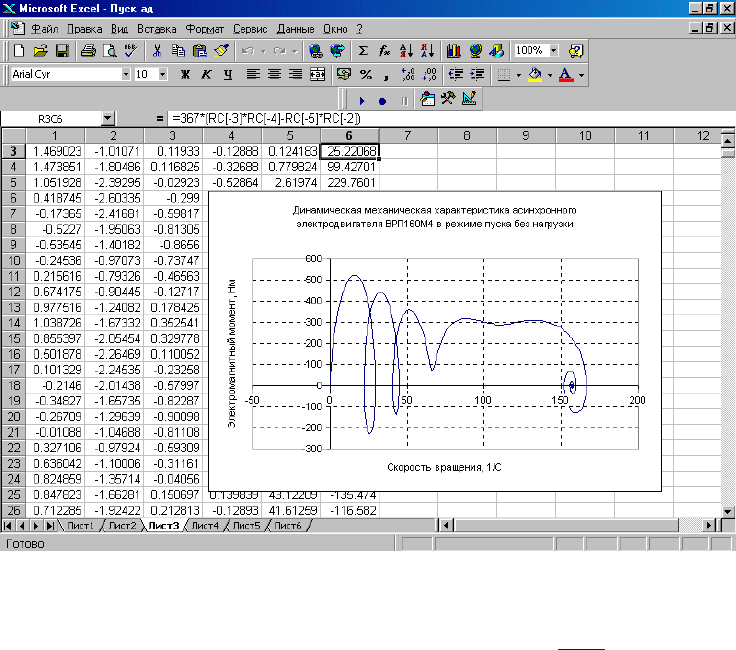
Расчет динамической механической характеристики пуска АД в среде MicroSoft Excel
Инструмент для исследования режимов работы АД можно найти
здесь.
3.3.ЗАДАНИЯ ПО ЛАБОРАТОРНОМУ ПРАКТИКУМУ
Разработать и исследовать при помощи имитационной модели:
влияние изменения параметров ротора от скорости его вращения на форму динамических харак-
теристик пуска;
режимы работы АД при периодической нагрузке различной частоты;
режимы торможения АД противовключением;

23
режимы динамического торможения АД;
режимы работы АД при несинусоидальном напряжении питания;
режимы работы АД при внезапном набросе нагрузки;
режимы работы АД при потере напряжения питания и повторном его включении;
3.4.МОДЕЛИРОВАНИЕ СТАТИЧЕСКИХ РЕЖИМОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
Для статических режимов исходную систему уравнений движения АД можно переписать, учиты-
вая, что значения производных от потокосцеплений в координатной системе
u, v равно нулю:
()
()
=
Ψ
+
Ψ
−+
Ψ
−Ψ⋅
=
Ψ
−−
Ψ
+Ψ⋅+
Ψ
−
=
Ψ
−Ψ⋅+
Ψ
+
Ψ
=Ψ⋅+
Ψ
−
Ψ
−
Ψ
.
L
R
p
k
L
R
,p
L
R
k
L
R
,
Uk
L
R
L
R
,
Uk
L
R
L
R
rv
'
r
r
runsv
s
'
r
r
su
rvnru
'
r
r
svsu
s
'
r
r
sv
rv
r
'
s
s
rusv
'
s
s
sun
su
rvru
r
'
s
s
svnsu
'
s
s
0 0
0 0
0
0
ωω
ωω
ω
ω
После этого модель АД можно рассматривать как систему линейных алгебраических уравнений
относительно составляющих потокосцеплений по координатным осям синхронной вращающейся систе-
мы координат. Матрица коэффициентов будет выглядеть следующим образом:
()
()
00
00
0
0
L
R
p
k
L
R
p
L
R
k
L
R
Uk
L
R
L
R
Uk
L
R
L
R
'
r
r
n
s
'
r
r
n
'
r
r
s
'
r
r
svr
'
s
s
'
s
s
n
sur
'
s
s
n
'
s
s
+−+−
−−+−
−+
−−
ωω
ωω
ω
ω
Program AD;
{
Учебные задачи кафедры вычислительной техники
Кузбасского государственного технического университета
===========================================================
Специальность 180400 - Электропривод и автоматика
промышленных установок и технологических комплексов
===========================================================
Исследование статических механических характеристик асинхронного электро-
двигателя
Подготовка файлов данных (потокосцепления, скорость, электромагнитные мо-
менты, напряжения на обмотках статора и пр.
}
Uses Crt;
Type
mas = array[1..4,1..5] of real;
Var Old_mw,New_mw : text;{ Файлы для хранения данных }
Rs,Rr,Xs,Xr,Xm, { Параметры электродвигателя }
l1,l2,lm,w,
24
lps,lpr,ks,kr,
Emc, p,
c,
Is,
Isa,Isb,Usa,Usb,
Rk,Xk,Lk,Lkab,
Ua,Ub,
Udvig,Ukabel,t,
Moment, Wn : real;
k,n,i,N_point,m : integer;
New_Str,Old_Str,N_str : string;
A : mas;
x : array[1..4] of real;
{----------------------------------------------------------}
{$I Koef }
{----------------------------------------------------------}
{$I e15 }
{----------------------------------------------------------}
begin ClrScr;
N:=4; Wn:=314.0; N_point:=100;
{
В файле с именем Old_mw.dat будем хранить информацию о значениях электро-
магнитного момента и скорости вращения ротора
}
assign(Old_mw,'Old_mw.dat');
rewrite(Old_mw);
for i:= 1 to N_point do writeln(Old_mw,' ');
reset(Old_mw);
assign(New_mw,'New_mw.dat');
rewrite(New_mw);
t:=0.0; Lkab:= 2; { Длина кабеля в км. }
while Lkab >= 0 do begin
W:=0;
while W<=157 do begin
Koef;
Gauss;
Moment:=c*(x[3]*x[2]-x[1]*x[4]);
readln(Old_mw,Old_str);
str(Moment:9:3,N_Str);
New_Str:=Concat(Old_Str,' ',N_Str);
writeln(New_mw,New_Str);
w:=w+157/50;
end;
rewrite(Old_mw); reset(New_mw);
for i:=1 to 51 do begin
25
readln(New_mw,New_Str);
writeln(Old_mw,New_str);
end;
rewrite(New_mw);
reset(Old_mw);
Lkab:=Lkab-0.2;
end;
close(Old_mw);
close(New_mw);
Writeln('Press any key... ');
readln;
end.
{----------------------------------------------------------}
Procedure Koef;
{
Вычисление коэффициентов линейной системы уравнений
}
var i,j :integer;
begin
{----- например, для АД с параметрами ----------------------}
Rs:=0.516; Rr:=0.406);
xs:=1.419; Xr:=1.1;
Lm:=35.0; p :=2.0;
l1:=xs/Wn; L2:=Xr/Wn;
{
переходные индуктивности и коэффициенты электромагнитной связи
}
Lps:=l1+l2*lm/(l2+lm); Lpr:=l2+l1*lm/(l1+lm);
Ks :=lm/(lm+l1); Kr :=lm/(lm+l2);
c :=3*p*ks/(2*lpr);
{====== Коэффициенты матрицы ==============================}
A[1,1]:= Rs/Lps; A[4,1]:= 0.0;
A[1,2]:=-Wn; A[4,2]:= -Ks*Rr/Lpr;
A[1,3]:= -Kr*Rs/Lps; A[4,3]:= p*W-Wn;
A[1,4]:= 0; A[4,4]:= Rr/Lpr;
A[1,5]:= 537; A[4,5]:= 0.0;
A[2,1]:= Wn; A[3,1]:=-Ks*Rr/Lpr;
A[2,2]:= Rs/Lps; A[3,2]:= 0.0;
A[2,3]:= 0; A[3,3]:= Rr/Lpr;
A[2,4]:= -Kr*Rs/Lps; A[3,4]:=-(Wn-p*W);
A[2,5]:= 0.0; A[3,5]:= 0.0;
end;
{----------------------------------------------------------}
Procedure Gauss;
{
Решение системы линейных алгебраических уравнений
методом Гаусса

26
}
var
S, M : real;
i,j : integer ;
{------------------------------------------------------------}
Procedure Perestanovka;
var
Str,Col,Num : integer;
Max,Prom : real;
begin
Max := abs(A[k,k]);
for Str := k to N do begin
if Max < abs(A[Str,k]) then begin Max := abs(A[Str,k]);
Num := Str;
end;
end;
for Col := k to N+1 do begin
Prom := A[k,Col];
A[k,Col] := A[Num,Col];
A[Num,Col]:= Prom;
end;
end;
{--------------------------------------------------------}
begin
for k := 1 to N-1 do begin
for i := k + 1 to N do begin
if A[k,k]=0 then Perestanovka;
M := A[i,k]/A[k,k];
A[i,k] := 0;
for j := k + 1 to N + 1 do begin
A[i,j] := A[i,j] - M * A[k,j];
end;
end;
end;
X[n] := A[n,n+1]/A[n,n];
for i := n-1 downto 1 do begin
S := 0;
for j := i + 1 to n do S := S + A[i,j]*X[j];
X[i] := (A[i,n+1] - S)/A[i,i];
end;
end;
3.5.ЗАДАНИЯ ПО ЛАБОРАТОРНОМУ ПРАКТИКУМУ
Получить при помощи статической модели АД семейства характеристик: реостатных; фазовых;
частотных;
4.МОДЕЛЬ ОДИНОЧНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С КАБЕЛЕМ В СТАТОРНОЙ ЦЕПИ
В реальных шахтных условиях асинхронные электродвигатели в приводах горных машин прак-
тически всегда имеют в статорной цепи дополнительный элемент - кабель. Влияние его параметров - ак-
27
тивного и реактивного сопротивлений существенно из-за увеличения доли падения напряжения на них
при росте длины этого кабеля.
Асинхронный электродвигатель с короткозамкнутым ротором в неподвижной координатной сис-
теме
α
,
β
описывается следующим образом
Ψ+−=
Ψ
Ψ−−=
Ψ
=−=
Ψ
=−=
Ψ
.piR
dt
d
,piR
dt
d
,fiRU
dt
d
,fiRU
dt
d
rrr
r
rrr
r
sss
s
sss
s
αβ
β
βα
α
ββ
β
αα
α
ωω
21
(4.1)
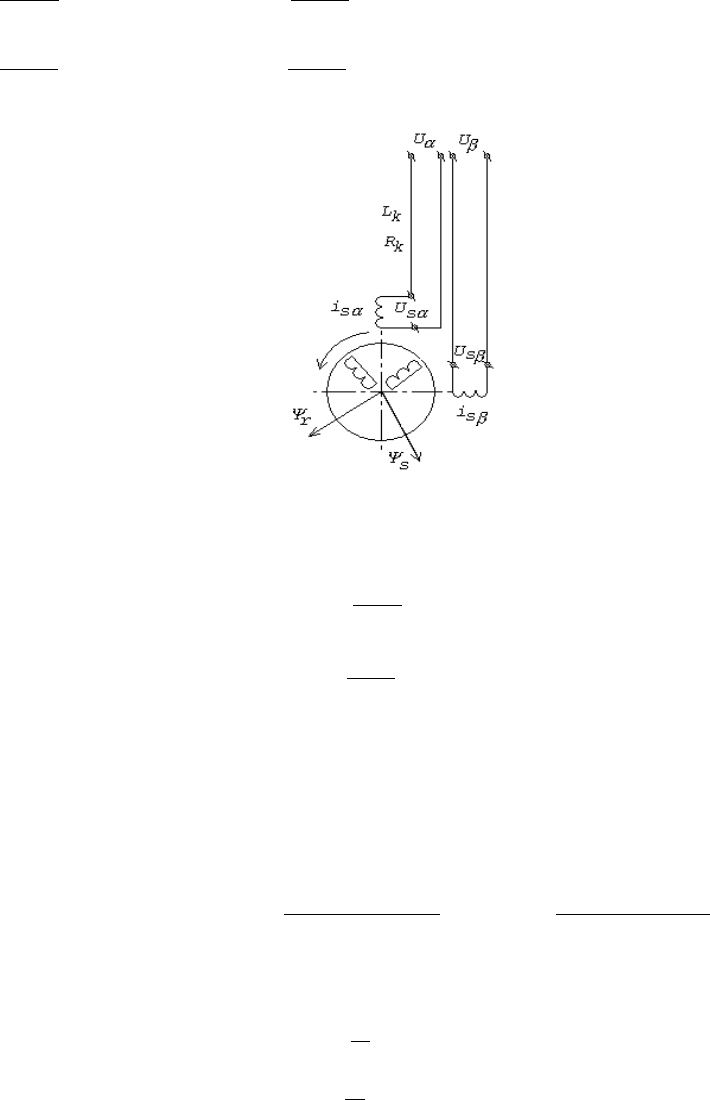
Расчетная схема АД с кабелем в статорной цепи.
Процессы в кабельной сети могут быть исследованы на основе связей Кирхгофа
=−=
=−=
.
f
iRU
dt
di
L
,
f
iRU
dt
di
L
skk
s
k
skk
s
k
6
5
ββ
β
αα
α
(4.2)
Условия Кирхгофа для напряжений контура: вторичная обмотка трансформатора - кабельная сеть
- статорная обмотка электродвигателя записываются следующим образом
−=
−=
.
UUU
,
UUU
ks
ks
βββ
ααα
(4.3)
Связи между токами и потосцеплениями обмоток электродвигателя
Ψ
−
Ψ
=
Ψ
−
Ψ
= .
'L
k
i
,
'L
k
i
s
r
r
s
s
s
r
r
s
s
ββ
β
αα
α
(4.4)
Используя условия Кирхгофа для напряжений контура: вторичная обмотка трансформатора - ка-
бельная сеть - статорная обмотка электродвигателя можем записать:
−−=
Ψ
−−=
Ψ
.
i
R
UU
dt
d
,
i
R
UU
dt
d
s
s
k
s
s
s
k
s
βββ
β
ααα
α

28
С учетом (4.2) из последних связей следует (при замене обозначений D
÷
d
t
d
):
−−−=
Ψ
−−−=
Ψ
.
i
R
i
R
i
D
L
U
D
,
i
R
i
R
i
D
L
U
D
s
s
s
k
s
ks
s
s
s
k
s
ks
ββββ
β
αααα
α
(4.5)
Из (4.4) после дифференцирования получаем:
Ψ
−
Ψ
=
Ψ
−
Ψ
= .
'L
D
k
D
Di
,
'L
D
k
D
Di
s
r
r
s
s
s
r
r
s
s
ββ
β
αα
α
И далее, используя последнее в (4.5)
−−
Ψ
−
Ψ
−=
Ψ
−−
Ψ
−
Ψ
−=
Ψ
.
i
R
i
R
'L
D
k
D
L
U
D
,
i
R
i
R
'L
D
k
D
L
U
D
s
s
s
k
s
r
r
s
k
s
s
s
s
k
s
r
r
s
k
s
ββ
ββ
β
β
αα
αα
α
α
После преобразований будем иметь:
+−=
Ψ
−
Ψ
+
+−=
Ψ
−
Ψ
+
,1
1
i
)
R
R(
U
D
'L
L
k
D
'L
L
,
i
)
R
R(
U
D
'L
L
k
D
'L
L
s
s
k
r
s
k
r
s
s
k
s
s
k
r
s
k
r
s
s
k
αβ
ββ
αα
αα
или окончательно математическую модель АД с кабелем в статорной цепи:
=
Ψ
−=
Ψ
=
Ψ
−−=
Ψ
+−
Ψ
−+=
Ψ
+
+−
Ψ
−−+=
Ψ
+
.
f
p
i
R
D
,
f
p
i
R
D
i
)
R
R(
)p
i
R
(
'L
L
kU
D
'L
L
,
i
)
R
R(
)p
i
R
(
'L
L
kU
D
'L
L
r
r
rr
r
r
rr
s
s
k
r
r
r
s
k
r
s
s
k
s
s
k
r
r
r
s
k
r
s
s
k
4
3
+
,+1
1
α
β
β
β
α
α
β
α
β
β
β
α
β
αα
α
ω
ω
ω
ω
(4.6)
Видно, что при отсутствии кабеля модель по (4.6) совпадает с исходной моделью (4.1).
4.1.РАСЧЕТЫ СТАТИЧЕСКИХ РЕЖИМОВ СИСТЕМЫ: АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ -
КАБЕЛЬНАЯ СЕТЬ
Для исследования статических характеристик запишем систему уравнений (4.6) в координатной
системе U,V, учитывая при этом, что производные потокосцеплений в этом случае будут равны нулю и
потребуется проводить анализ алгебраической системы уравнений.
29
(
)()
()
()
()
Ψ
−−=
Ψ
−+−=
Ψ−+−
Ψ
−−+=
Ψ++−
Ψ
−+−+=
.p
i
R
,p
i
R
i
)
R
R(
p
i
R
L
L
kU
,
i
)
R
R(
p
i
R
L
L
kU
ru
n
rv
r
rv
n
ru
r
sun
sv
s
k
run
rv
r
'
s
k
rv
svn
su
s
k
rv
n
ru
r
'
s
k
ru
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
- 0
0
,-0
0
(4.7)
С использованием связей (4.4), записанных в этих же координатах система (4.7) может быть
приведена к виду
=Ψ+Ψ+Ψ+Ψ
=Ψ+Ψ+Ψ+Ψ
=Ψ+Ψ+Ψ+Ψ
=
Ψ
+
Ψ
+
Ψ
+Ψ
,aaaa
,aaaa
,Uaaaa
,Uaaaa
rvrusvsu
rvrusvsu
vrvrusvsu
urvrusvsu
0
0
44434241
34333231
24232221
14131211
(4.8)
где
,
L
RR
LL
kkRL
a
'
s
sk
'
r
'
s
srrk
+
−=
11
,a
n
ω
−
=
12
,
LL
kR
L
L
RR
ka
'
r
'
s
rr
k
'
s
sk
r
−
+
=
13
()
,p
L
kL
a
n
'
s
rk
ωω
−=
14
,a
n
ω
=
21
,
L
RR
LL
kkRL
a
'
s
sk
'
r
'
s
srrk
+
−=
22
()
,p
L
kL
a
n
'
s
rk
ωω
−−=
23
,
LL
kR
L
L
RR
ka
'
r
'
s
rr
k
'
s
sk
r
−
+
=
24
,
L
R
ka
'
r
r
s
=
31
,a 0
32
=
,
L
R
a
'
r
r
−=
33
()
,pa
n
ω
ω
−
=
34
,a 0
41
=
,
L
R
a
'
r
r
−=
42
()
,pa
n
ω
ω
−
−=
43
.
L
R
a
'
r
r
−=
44
Рассматривая и решая (например, методом Гаусса) систему (4.8) относительно потокосцеплений
как систему линейных алгебраических уравнений при изменении скорости вращения электродвигателя
от нуля до синхронной (для каждого задаваемого значения скорости) и используя для нахождения значе-
ний электромагнитного момента известную связь
(
)
Mp
k
L
r
s
ru sv rv su
=−
3
2
'
,ΨΨ ΨΨ
получим возможность построения семейств механических характеристик при различной длине питающе-
го кабеля
30
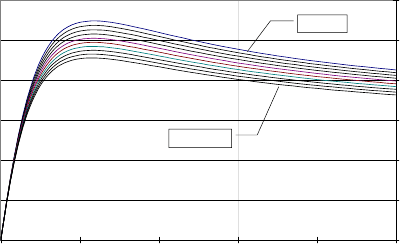
0
100
200
300
400
500
600
031.462.894.2125.6157
W,1/С
М,Нм
Lk=0
Lk=1200 м
Статические механические характеристики асинхронного электродвигателя ВРП160М4 при различной
длине питающего кабеля
Исходные тексты программы на языке
Pascal для подготовки данных (значений электромагнитного мо-
мента и относительных скольжений при различных длинах питающего кабеля) приведены ниже:
Program AD;
{
Исследование статических механических характеристик асинхронного электро-
двигателя с кабелем в статорной цепи
Подготовка файлов данных (потокосцепления, скорость, электромагнитные мо-
менты, напряжения на обмотках статора и пр.
}
Uses Crt;
Type
mas = array[1..4,1..5] of real;
Var Old_mw,New_mw : text;{ Файлы для хранения данных }
Rs,Rr,Xs,Xr,Xm, { Параметры электродвигателя }
l1,l2,lm,w,
lps,lpr,ks,kr,
Emc, p,
c,
Is,
Isa,Isb,Usa,Usb,
Rk,Xk,Lk,Lkab,
Ua,Ub,
Udvig,Ukabel,t,
Moment, Wn : real;
k,n,i,N_point,m : integer;
New_Str,Old_Str,N_str : string;
A : mas;
x : array[1..4] of real;
{----------------------------------------------------------}
{$I Koef }
{----------------------------------------------------------}
{$I e15 }
{----------------------------------------------------------}
begin ClrScr;
N:=4; Wn:=314.0; N_point:=100;