Ещин Е.К. Моделирование систем управления электромеханическими объектами
Подождите немного. Документ загружается.

111
U = -1
End If
If Y(1) > 0 And Y(2) < 0 And Y(1) > Y(2) ^ 2 / 2 Then
U = -1
End If
If Y(1) > 0 And Y(2) < 0 And Y(1) <= Y(2) ^ 2 / 2 Then
U = 1
End If
'----------------------------------------------------------
If Y(1) < 0 And Y(2) < 0 Then
U = 1
End If
If Y(1) < 0 And Y(2) > 0 And Y(1) < -Y(2) ^ 2 / 2 Then
U = 1
End If
If Y(1) < 0 And Y(2) > 0 And Y(1) >= -Y(2) ^ 2 / 2 Then
U = -1
End If
End Sub
'==============================================================
Sub Uravnen()
' Формирование управления
Upravlen
' Уравнения движения объекта
F(1) = Y(2)
F(2) = U
End Sub
'==============================================================
Sub Runge(x As Single)
x = X0:
For i = 1 To N: Y(i) = Y0(i): Next i: Uravnen
For i = 1 To N: k1(i) = h * F(i): Next i
x = X0 + h / 2
For i = 1 To N: Y(i) = Y0(i) + k1(i) / 2: Next i: Uravnen
For i = 1 To N: k2(i) = h * F(i): Next i
For i = 1 To N: Y(i) = Y0(i) + k2(i) / 2: Next i: Uravnen
For i = 1 To N: k3(i) = h * F(i): Next i
x = X0 + h
For i = 1 To N: Y(i) = Y0(i) + k3(i): Next i: Uravnen
For i = 1 To N: k4(i) = h * F(i): Next i
For i = 1 To N
Y(i) = Y0(i) + (k1(i) + 2 * k2(i) + 2 * k3(i) + k4(i)) / 6
Next i
End Sub
'==============================================================
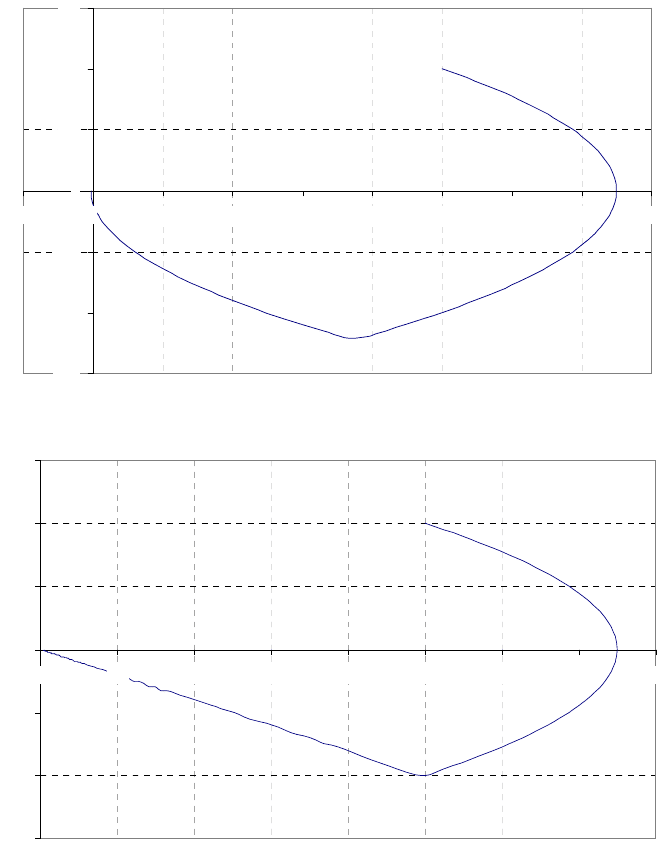
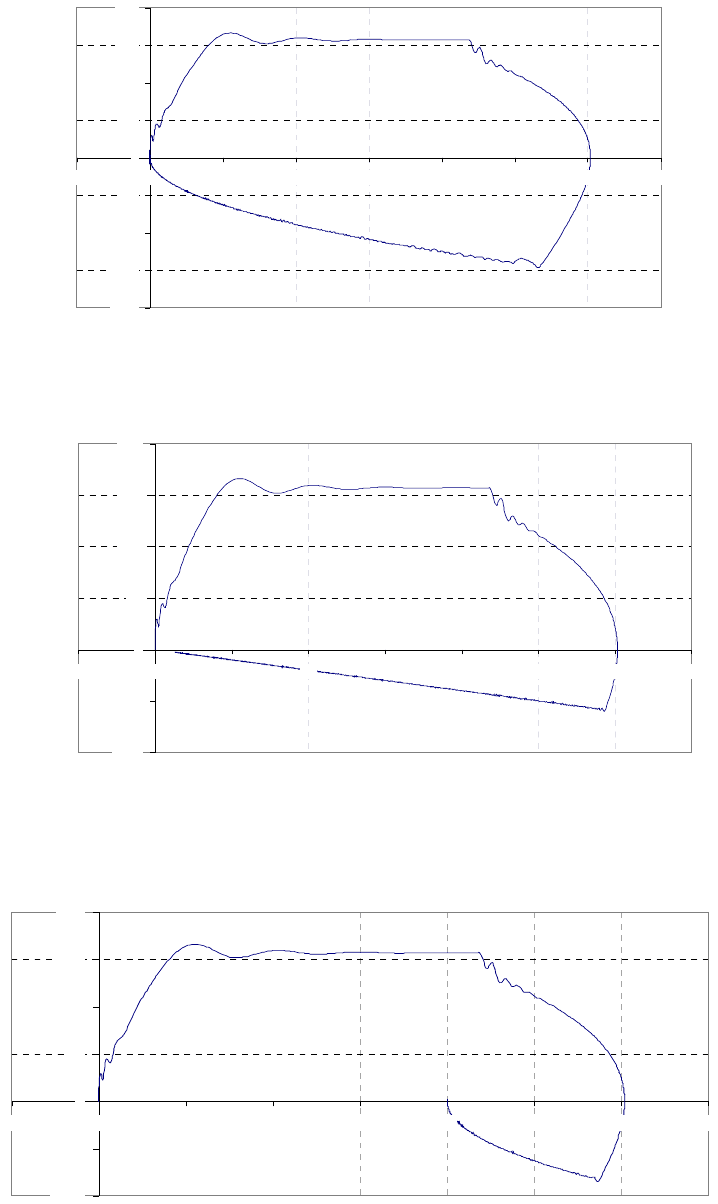
Ниже приведены фазовые портреты при оптимальном и квазиоптимальном вариантах управле-
ния, когда линия переключения (идеально состоящая из двух парабол) аппроксимируется прямой лини-
ей, проходящей через начало координат. Также приведены иллюстрирующие примеры возникновения
«скользящего» режима.
112
-1.5
-1
-0.5
0
0.5
1
1.5
-0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
x1
x2
Оптимальная фазовая траектория
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
X1
X2
Квазиоптимальная фазовая траектория при k=-1
113
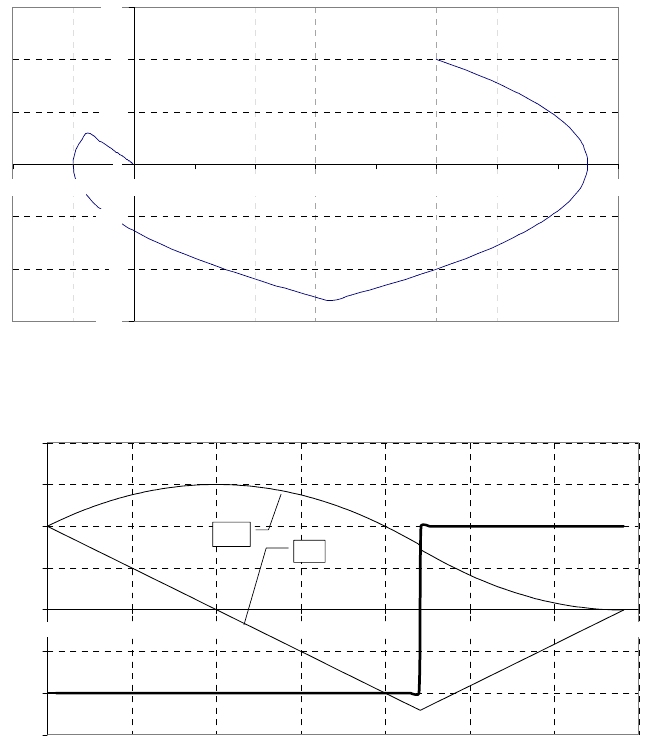
Фазовый портрет при квазиотпимальном управлении
-1.5
-1
-0.5
0
0.5
1
1.5
-0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
X1
X2
Квазиоптимальная фазовая траектория при k=-2
Изменение фазовых координат и управляющего воздействия
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 0.5 1 1.5 2 2.5 3 3.5
t,C
X1,X2,U
X1
x2
114
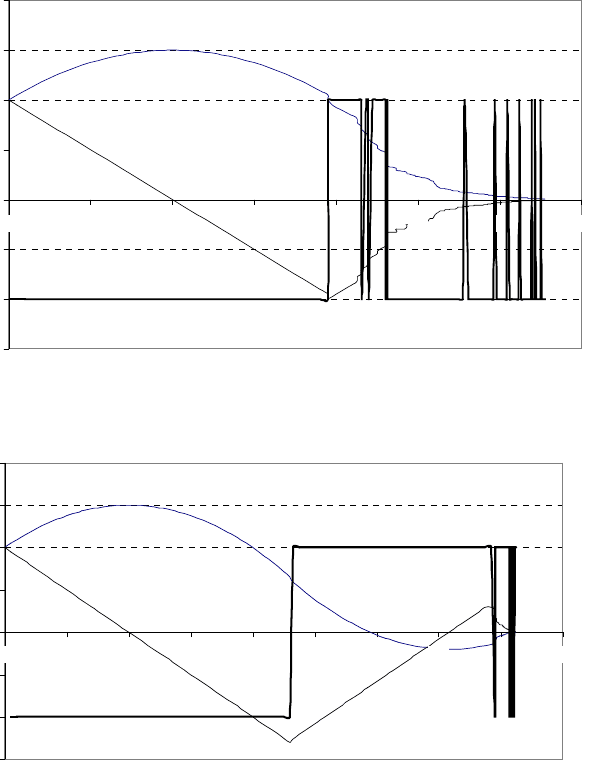
Возникновение скользящего режима
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 0.5 1 1.5 2 2.5 3 3.5
t,C
X1,X2,U
Возникновение скользящего режима
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
t,C
X1,X2,U
Фрагмент текста исходного модуля, определяющего положение исходной точки и параметры ли-
нии переключения:
...
For i = 1 To N
Do
Prom = InputBox("Координата X0(" & Str(i) & ")=", _
" Определение положения начальной точки")
Loop Until IsNumeric(Prom)
Y0(i) = Prom
Next i
Do
Prom = InputBox("Коэффициент наклона линии переключения", _
" Условия возникновения скользящего режима")
Loop Until IsNumeric(Prom)
K = Prom
Фрагмент текста исходного модуля, определяющий поведение объекта при квазиоп-
тимальном управлении:
...
115
'==============================================================
Sub Uravnen()
If Y(2) >= K * Y(1) Then
U = -1
Else
U = 1
End If
F(1) = Y(2)
F(2) = U
End Sub
'==============================================================
13.МАТЕМАТИЧЕСКИЕ ОСНОВЫ КОНСТРУИРОВАНИЯ СИСТЕМ УПРАВЛЕНИЯ
13.1. ПРИНЦИП МАКСИМУМА Л.С.ПОНТРЯГИНА. УСЛОВИЯ ТРАНСВЕРСАЛЬНОСТИ
Определим некоторые понятия:
1. Множество S точек x=(x
1
, x
2
,…, x
n
) удовлетворяющих соотношению
f(x
1
, x
2
,…, x
n
)=0,
называется
гиперповерхностью пространства X, а упомянутое соотношение уравнением этой ги-
перповерхности. Например, условия
0=Ψαω−Ψ
′
−Ψ
′
+−
Ψ
svnrur
s
s
su
s
s
su
su
k
L
R
L
R
U
dt
d
являются уравнением гиперповерхности.
Если соотношение линейно, т.е. имеет вид
0
2
2
1
1
=++++ bxa...xaxa
n
n
,
то гиперповерхность называется
гиперплоскостью.
2. Если функция f имеет первые частные производные по переменным x
1
, x
2
,…, x
n
, то в каждой
точке x определен вектор
∂
∂
∂
∂
∂
∂
n
x
f
,...,
x
f
,
x
f
21
,
называемый
градиентом функции f(x) и обозначаемый grad f(x).
3. Пусть x
0
произвольная точка гладкой гиперповерхности. Вектор grad f(x
0
) называется нор-
мальным вектором
(нормалью) гиперповерхности S в точке x
0
.
4. Гиперплоскость, проходящая через точку x
0
и имеющая вектор grad f(x
0
) своей нормалью, на-
зывается касательной гиперплоскостью гиперповерхности S в точке x
0
.
5. Пусть S
1
, S
2
,…, S
n
– гладкие гиперповерхности, заданные в пространстве X соответственно
уравнениями
f
1
(x
1
, x
2
,…, x
n
)=0,
f
2
(x
1
, x
2
,…, x
n
)=0,
….
f
k
(x
1
, x
2
,…, x
n
)=0.
Пересечение M всех этих гиперповерхностей (т.е. множество всех точек x∈X, удовлетворяющих
всем указанным уравнениям) называется (n-k) мерным
многообразием, если выполнено следующее ус-
ловие: в каждой точке x∈M векторы
grad f
1
(x), grad f
2
(x),…, grad f
n
(x)
линейно независимы. Например, совокупность

116
()
()
=Ψω−αω+Ψ
′
−Ψ
′
+
Ψ
=Ψω−αω−Ψ
′
−Ψ
′
+
Ψ
=Ψαω+Ψ
′
−Ψ
′
+−
Ψ
=Ψαω−Ψ
′
−Ψ
′
+−
Ψ
.pk
L
R
L
R
dt
d
,pk
L
R
L
R
dt
d
,k
L
R
L
R
U
dt
d
,k
L
R
L
R
U
dt
d
runsvs
r
r
rv
r
r
rv
rvnsus
r
r
ru
r
r
ru
sunrvr
s
s
sv
s
s
sv
sv
svnrur
s
s
su
s
s
su
su
0
0
0
0
определяет многообразие.
6.
Условия трансверсальности. Будем говорить, что вектор ψ(t) (существование которого опре-
делено принципом максимума) удовлетворяет условию трансверсальности в концах траектории x(t), если
он ортогонален всем векторам, лежащим в касательной гиперплоскости конечного или начального мно-
гообразий.
13.2. ПРИНЦИП МАКСИМУМА Л.С.ПОНТРЯГИНА. ЗАДАЧА ПОЗИЦИОНИРОВАНИЯ
АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
Будем полагать, что, как и прежде, реализуется частотный способ управления асинхронным элек-
тродвигателем и поэтому, как и ранее,
необходимо определить связи (определяющие аналитическую
конструкцию оптимального регулятора)
между управляющими воздействиями (относительными зна-
чениями частоты тока статора (α) и напряжения (γ)),
фазовыми координатами, характеризующими
состояние электродвигателя
(потокосцепления, скорость вращения ротора) и его параметрами.
Исходные уравнения движения АД в синхронной системе вращающихся координат U,V образуют
систему дифференциальных связей, описывающих состояние АД
()
()
()()
ω=
γ
−ΨΨ−ΨΨ=
ω
Ψω−αω−Ψ
′
+Ψ
′
−=
Ψ
Ψω−αω+Ψ
′
+Ψ
′
−=
Ψ
Ψαω−Ψ
′
+Ψ
′
−=
Ψ
Ψαω+Ψ
′
+Ψ
′
−=
Ψ
−
.
dt
d
,McJ
dt
d
,pk
L
R
L
R
dt
d
,pk
L
R
L
R
dt
d
,k
L
R
L
R
U
dt
d
,k
L
R
L
R
U
dt
d
crvsusvru
runsvs
r
r
rv
r
r
rv
rvnsus
r
r
ru
r
r
ru
sunrvr
s
s
sv
s
s
sv
sv
svnrur
s
s
su
s
s
su
su
1
Образуем вспомогательную функцию:
117
()
()
() ()
()
()
()
()()
ωψ+
−ΨΨ−ΨΨ
′
ψ+
+
Ψω−αω−Ψ
′
+Ψ
′
−ψ+
+
Ψω−αω+Ψ
′
+Ψ
′
−ψ+
+
Ψαω−Ψ
′
+Ψ
′
−ψ+
+
Ψαω+Ψ
′
+Ψ
′
−ψ=
−
tM
L
k
pJt
pk
L
R
L
R
t
pk
L
R
L
R
t
k
L
R
L
R
Ut
k
L
R
L
R
UtH
crvsusvru
s
r
runsvs
r
r
rv
r
r
rvnsus
r
r
ru
r
r
sunrvr
s
s
sv
s
s
sv
svnrur
s
s
su
s
s
su
6
1
5
4
3
2
1
2
3
и систему для определения составляющих функции ψ:
.
H
,
H
,
H
,
H
,
H
,
H
rv
rusvsu
γ∂
∂
−=ψ
ω∂
∂
−=ψ
Ψ∂
∂
−=ψ
Ψ∂
∂
−=ψ
Ψ∂
∂
−=ψ
Ψ∂
∂
−=ψ
654
321
&&&
&&&
Раскрывая эти связи, будем иметь:
,
L
k
pJk
L
R
L
R
rv
s
r
s
r
r
n
s
s
Ψ
′
ψ+
′
ψ−αωψ+
′
ψ=ψ
−
2
3
1
53211
&
,
L
k
pJk
L
R
L
R
ru
s
r
s
r
r
s
s
n
Ψ
′
ψ−
′
ψ−
′
ψ+αωψ−=ψ
−
2
3
1
54212
&
()
,
L
k
pJp
L
R
k
L
R
sv
s
r
n
r
r
r
s
s
Ψ
′
ψ−ω−αωψ+
′
ψ+
′
ψ−=ψ
−
2
3
1
54313
&
()
,
L
k
pJ
L
R
pk
L
R
su
s
r
r
r
nr
s
s
Ψ
′
ψ+
′
ψ+ω−αωψ−
′
ψ−=ψ
−
2
3
1
54324
&
,pp
rurv 6435
ψ
−Ψψ−Ψψ=ψ
&
,
.0
6
=ψ
&
Учитывая, что в условиях оптимальности
() () ()()()
(
)()
u,tx,tHmaxtu,tx,tH
Uu
ψ=ψ
∈
,
можем дополнительно записать, полагая непрерывность функций управления
0 0 0 =
α∂
∂
=
∂
∂
=
∂
∂ H
,
U
H
,
U
H
s
v
s
u
,
откуда следует:
,, 0 0
21
=ψ=ψ
.
rur
v
0
43
=Ψψ−Ψψ
С учетом последних выражений, система для определения составляющих функции ψ будет вы-
глядеть:
,
L
k
pJk
L
R
rv
s
r
s
r
r
Ψ
′
ψ+
′
ψ−=
−
2
3
0
1
53
,
L
k
pJk
L
R
ru
s
r
s
r
r
Ψ
′
ψ−
′
ψ−=
−
2
3
0
1
54
118
()
,
L
k
pJp
L
R
sv
s
r
n
r
r
Ψ
′
ψ−ω−αωψ+
′
ψ+=ψ
−
2
3
1
5433
&
()
,
L
k
pJ
L
R
p
su
s
r
r
r
n
Ψ
′
ψ+
′
ψ+ω−αωψ−=ψ
−
2
3
1
5434
&
,
65
Ψ−=
ψ
&
.0
6
=
ψ
&
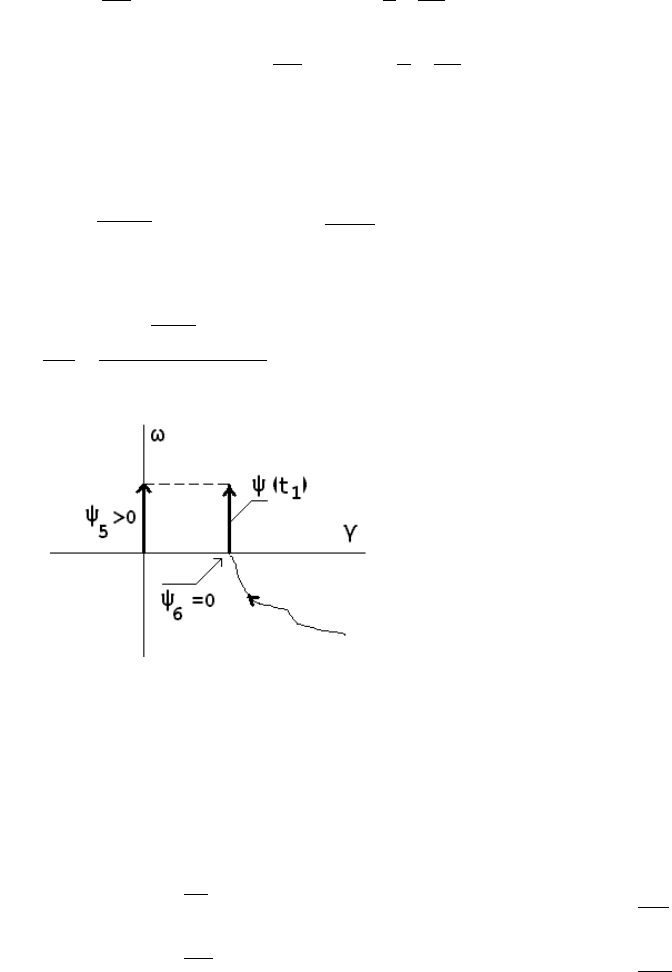
С учетом условий трансверсальности (см. рисунок) решение выглядит так:
,
JR
p
rv
r
Ψψ=ψ
2
3
53
,
JR
p
ru
r
Ψψ−=ψ
2
3
54
ψ
5
=С
1
, ψ
6
=0,
где С
1
=const, а с учетом необходимости выполнения условия H≡1, получим
.
p
M
C
J
R
p
r
n
cr
n
2
1
3
2
Ψω
+
±
+
ω
ω
=α
Условия трансверсальности в задаче позиционирования асинхронного электродвигателя
В номинальном режиме работы, при отсутствии необходимости управления С
1
=J/M. В управляе-
мом варианте эта постоянная определяет сигнал задания.
Продолжим рассмотрение задачи об управлении асинхронным электродвигателем, проводя ана-
логию с задачей об управлении объектом второго порядка.
Основные уравнения движения электропривода можно записать с естественными ограничениями
в виде (для сравнения запишем и уравнения движения объекта 2-го порядка):
АД-
maxmin
MMM
,MJ
dt
d
,
dt
d
∆≤∆≤∆
∆=
ω
ω=
γ
−1
объект 2-го порядка -
11
2
2
1
≤
≤
=
=
u
;u
dt
dx
,x
dt
dx
где γ - угол поворота вала ротора электродвигателя, ∆M=M-M
c
– динамический момент. Остальные обо-
значения соответствуют обозначениям, принятым ранее. При этом между обозначениями предыдущей
задачи и рассматриваемой существует связь x
1
÷γ, x
2
÷ω, u÷∆M.
Формулировка задачи в прежней постановке, т.е. о переводе объекта (асинхронного электродви-
гателя) из произвольного начального состояния в начало координат физически означает возврат к нуле-
вому значению угла поворота ротора. Этот вариант управления можно представить себе в машинах, у
которых по условиям выполнения технологического процесса исполнительный орган должен вернуться в
исходное положение.
Запишем вспомогательную функцию

119
MH ∆ψ+ωψ=
21 .
Для вспомогательных переменных ψ, как и прежде, получаем систему уравнений
121
0 ψ−=ψ=ψ
&&
,
.
Также находим: ψ
1
=d
1
; ψ
2
= -d
1
t+d
2
, где d
1
, d
2
– постоянные интегрирования.
В силу соотношения максимума (D) пишем
() ()
() ()
.tif,MtM
;tif,MtM
min
max
0
0
2
2
<ψ∆=∆
>ψ∆=∆
Отсюда
теоретически следует, что каждое оптимальное управление является функцией, прини-
мающей значения ∆M
max
,, ∆M
min
и имеющей не более двух интервалов постоянства.
Рассмотрим фазовые траектории, соответствующие возможным вариантам движений АД. Как и
ранее, можно записать
ω
∆
=
ω
γ
M
J
d
d
,
откуда следует при условии, что ∆M=const:
()
c
M
J
+ω
∆
=γ
2
2
.
Рассмотрим возможность обеспечения условия ∆M=const. Условия получения оптимального, в
смысле быстродействия, управления требуют, чтобы динамический момент АД при изменении знака со-
ставляющей ψ
2
(t) изменял свое значение от минимально возможного значения до максимально возмож-
ного. Конечно, такая возможность имеется, например, при реализации торможения АД противовключе-
нием. Заметим, что при этом динамический момент не является постоянной величиной, а функции
управляющего параметра принимает на себя электрическая частота вращения поля статора - ω
эл
=αω
н
. В
такой постановке появляется управляющий параметр α, который может принимать значения α=±1. Ко-
нечно, следует ожидать при этом появления скользящих режимов, которые нежелательны, но мы пока
рассматриваем
потенциальные возможности управления.
Анализ возможных оптимальных движений АД в исходное положение показывает, что они
должны формироваться по следующим правилам:
-при нахождении АД в I-м квадранте фазовой плоскости γ,ω:
If γ > 0 And ω > 0 Then α = -1
-при нахождении АД во II-м квадранте:
If γ < 0 And ω > 0 And γ < - ω
2
(J/2∆M) Then α = 1
If γ < 0 And ω > 0 And γ >= - ω
2
(J/2∆M) Then α = -1
-при нахождении АД в III-м квадранте:
If γ < 0 And ω < 0 Then α = 1
-при нахождении АД в IV-м квадранте:
If γ > 0 And ω < 0 And γ > ω
2
(J/2∆M) Then α = -1
If γ > 0 And ω < 0 And γ <= ω
2
(J/2∆M) Then α = 1
При этом фазовая траектория может выглядеть, например, следующим образом:
120
Позиционирование АД
-200
-150
-100
-50
0
50
100
150
200
-10 0 10 20 30 40 50 60 70
Угол поворота ротора, рад
Скорость вращения,1/С
Если реализуется линия переключения γ
= -Kω, то процесс перехода выглядит так:
Позиционирование АД
-100
-50
0
50
100
150
200
-10 0 10 20 30 40 50 60 70
Угол поворота ротора, рад
Скорость вращения,1/С
При реализации γ
=А±ω
2
(J/2∆M) процесс позиционирования представлен на следующем ри-
сунке:
Позиционирование АД
-100
-50
0
50
100
150
200
-10 0 10 20 30 40 50 60 70
Угол по ворота ротора, рад
Скорость вращения,1/С