Ещин Е.К. Моделирование систем управления электромеханическими объектами
Подождите немного. Документ загружается.

91
0
20
40
60
80
100
120
140
160
180
0 20406080100120140160
M,Hm
W,1/C
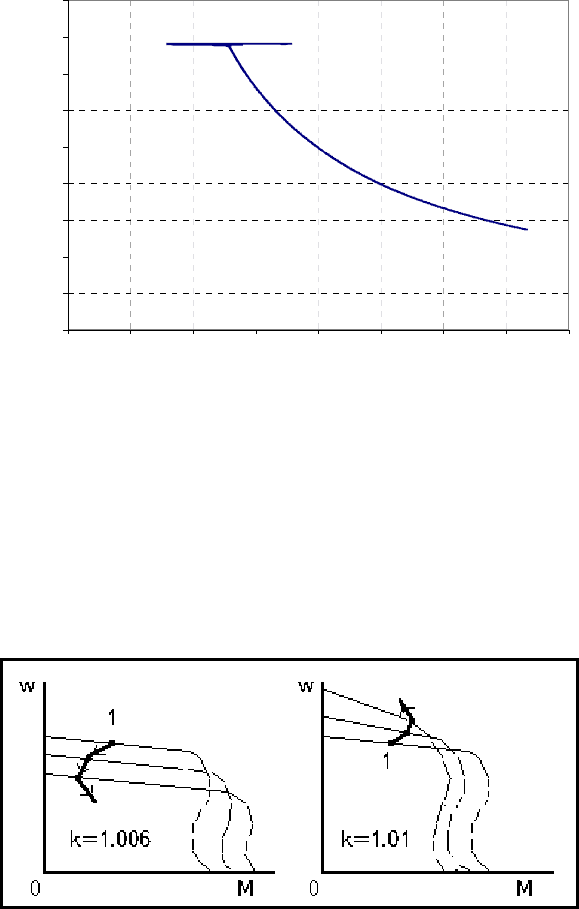
Тяговая механическая характеристика для АД ВРП160М4 при управлении в соответствии с
р
kα=α
Видно, что система приобретает свойства (оцениваемые по форме механических характеристик)
двигателя постоянного тока последовательного возбуждения.
При изменении коэффициента k (при исходном нахождении АД в точке номинального режима)
происходит искусственное изменение задаваемой частоты тока статора. Процессы формирования харак-
теристик в этом случае иллюстрируются следующим рисунком (см.ниже).
Величина k практически определяет значение задаваемого АД абсолютного скольжения и при
неизменном напряжении питания определяет скорость вращения двигателя.
К процессу формирования механических характеристик при изменении величины коэффициента обрат-
ной связи
Так, при значениях k>(1+S
н
) (S
н
- номинальное скольжение АД) происходит разгон двигателя до
скорости, которая определяет значение частоты тока статора, при которой деформация механической ха-
рактеристики в области номинального момента определится величиной (k-1) (при оценке жесткости ме-
ханической характеристики по скольжению).
Наоборот, при k<(1+S
н
) будет происходить торможение двигателя, рост его фактического крити-
ческого момента, увеличение жесткости механической характеристики до значений, определяемых вели-
чиной (k-1).
92
Процессы перехода АД в новое устойчивое состояние при изменении коэффициента цепи обратной свя-
зи
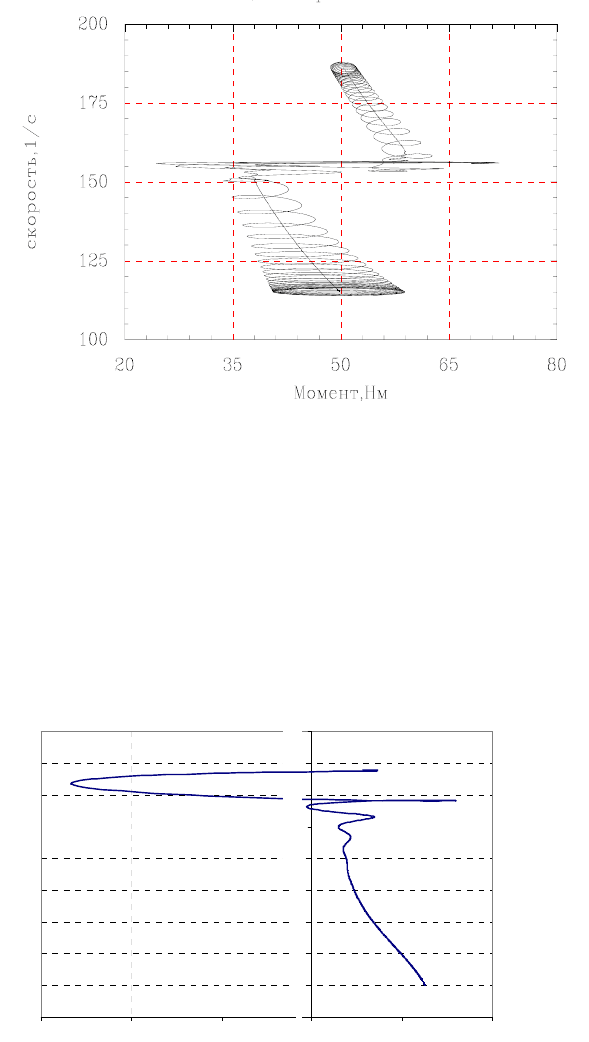
Интересно поведение АД при резком росте нагрузки на валу двигателя (в предельном режиме ра-
боты), например, при встрече исполнительного органа горной машины с твердым включением, при за-
клинивании тягового органа скребкового конвейера и т.п.
В этих случаях происходит резкое снижение частоты вращения ротора и, следовательно, частоты
тока статора. Резкое уменьшение частоты тока статора двигатель “расценивает” как перевод его в режим
электродинамического торможения и в начальный период времени формирует тормозной электромаг-
нитный момент. Это явление положительное, поскольку тем самым уменьшается количество энергии,
направляемое в механическое передаточное устройство при торможении. В дальнейшем АД обеспечива-
ет устойчивую работу с новым значением установившегося момента сопротивления на валу.
0
20
40
60
80
100
120
140
160
180
-300 -200 -100 0 100 200
M,Нм
W,1/C
Работа АД при встрече с твердым включением (переход на новый уровень статической нагрузки)
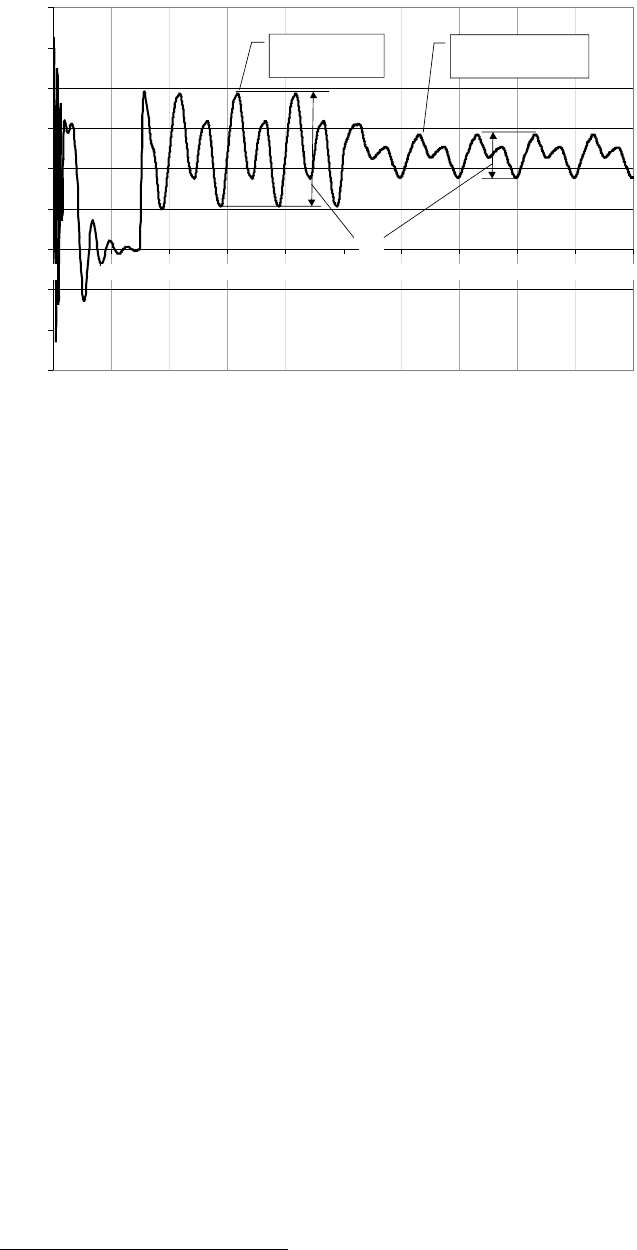
При работе с переменной нагрузкой на валу двигателя также наблюдается снижение величины
пульсаций электромагнитного момента (см.рисунок)
93
-300
-200
-100
0
100
200
300
400
500
600
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
неуправляемый
режим
квазиоптимальное
управление
dM
Квазиоптимальное управление асинхронным электродвигателем
Далее приведен текст исходного модуля на Visual Basic для среды Excel реализующего задачу
управления состоянием асинхронного электродвигателя при пульсирующей нагрузке на валу
60
:
' Учебные задачи кафедры ВТ
' Квазиоптимальное управление состоянием асинхронного электродвигателя
'===========================================================
Option Explicit
Public j, N, i As Integer
Public Y0(), Y0I(), Yz(), Y0z(), _
Y(), F(), _
k1(), k2(), _
k3(), k4() As Single
Public x, X0z, X0, _
Xk, h, Hz, _
eps As Single
Public Rs, Rr, Xs, Xr, Xm, _
l1, l2, lm, w, _
lps, lpr, ks, kr, _
p, GD2, c, Tvn, Tvu, _
alfa, Mc As Single
'=========================================================
Sub AD()
Dim Prom As Single
Dim Mess As String
N = 5
ReDim Y0(N), Y0I(N), Yz(N), Y0z(N), _
Y(N), F(N), _
k1(N), k2(N), k3(N), k4(N)
eps = 0.0001: h = 0.002: Hz = h
X0 = 0: X0z = X0: h = Hz: Xk = 2
For i = 1 To N
Y0(i) = 0
Next i
Y0(5) = 0.0001
60
Приведенный выше рисунок – результат реализации этого текста программы.
94
'=========================================================
Tvn = 0.3 ' Время подачи пульсирующей нагрузки на вал АД
Tvu = 1# ' Время включения управления состоянием АД
'=========================================================
' Параметры для двигателя ВРП160М4
Rs = 0.516: Rr = 0.406
Xs = 1.419: Xr = 1.1
Xm = 35: p = 2
GD2 = 0.7
' Коэффициенты для уравнений движения АД
l1 = Xs / 314
l2 = Xr / 314
lm = Xm / 314
lps = l1 + l2 * lm / (l2 + lm)
lpr = l2 + l1 * lm / (l1 + lm)
ks = lm / (lm + l1)
kr = lm / (lm + l2)
c = 3 * p * ks / (2 * lpr)
Shet ' Основная обработка и подготовка данных
MsgBox "Все!"
End Sub
'=========================================================
Sub Shet()
Dim L, K As Integer
Worksheets("Лист3").Select
Worksheets("Лист3").Range("A1: H5000").Clear
j = 2
With Worksheets("Лист3")
For K = 1 To N
.Cells(1, K + 1) = Y0(K)
Next K
End With
x = X0
While x <= Xk
Runge (x)
For i = 1 To N: Yz(i) = Y(i): Next i
h = h / 2
Runge (x)
For i = 1 To N: Y0(i) = Y(i): Next i
x = x + h
Runge (x)
L = 0
For i = 1 To N
If Abs(Yz(i) - Y(i)) < eps * Abs(Yz(i)) Then
L = L + 1
End If
Next i
If L = N Then
With Worksheets("Лист3")
For K = 1 To N
.Cells(j, K + 1) = Y(K)
Y0(K) = Y(K)
Y0z(K) = Y(K)
Next K
95
.Cells(j, 1) = x
.Cells(j, 7) = c * (Y(3) * Y(2) - Y(1) * Y(4))
End With
x = x + h
h = Hz
j = j + 1
Else
x = x - h
'MsgBox "h=" & Str(h)
End If
Wend
End Sub
'=========================================================
Sub Uravnen()
' Формирование момента сопротивления
If x <= Tvn Then
Mc = 0
Else
Mc = 250 + 100 * Sin(6.28 * 10 * x) + 50 * Sin(6.28 * 5 * x)
End If
' Формирование управляющего воздействия
If x <= Tvu Then
alfa = 1
Else
alfa = 1.05 * p * Y(5) / 314
End If
F(1) = 537 - Rs / lps * Y(1) + Rs / lps * kr * Y(3) + 314 * alfa * Y(2)
F(2) = -Rs / lps * Y(2) + Rs / lps * kr * Y(4) - 314 * alfa * Y(1)
F(3) = -Rr / lpr * Y(3) + Rr / lpr * ks * Y(1) + (314 * alfa - p * Y(5)) *
Y(4)
F(4) = -Rr / lpr * Y(4) + Rr / lpr * ks * Y(2) - (314 * alfa - p * Y(5)) *
Y(3)
F(5) = 4 * (c * (Y(3) * Y(2) - Y(1) * Y(4)) - Mc) / GD2
End Sub
'=========================================================
Sub Runge(x As Single)
x = X0
For i = 1 To N: Y(i) = Y0(i): Next i: Uravnen
For i = 1 To N: k1(i) = h * F(i): Next i
x = X0 + h / 2
For i = 1 To N: Y(i) = Y0(i) + k1(i) / 2: Next i: Uravnen
For i = 1 To N: k2(i) = h * F(i): Next i
For i = 1 To N: Y(i) = Y0(i) + k2(i) / 2: Next i: Uravnen
For i = 1 To N: k3(i) = h * F(i): Next i
x = X0 + h
For i = 1 To N: Y(i) = Y0(i) + k3(i): Next i: Uravnen
For i = 1 To N: k4(i) = h * F(i): Next i
For i = 1 To N
Y(i) = Y0(i) + (k1(i) + 2 * k2(i) + 2 * k3(i) + k4(i)) / 6
Next i
96
End Sub
'=========================================================
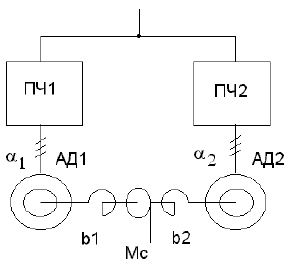
11.2.ПРИМЕР. МОДЕЛИРОВАНИЕ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ ПРИВОДОМ
Известно, что эффективное использование системы, состоящей из двух однотипных асинхронных
электродвигателей с короткозамкнутым ротором, работающих на один вал, вызывает определенные
трудности. Последние обусловлены разбросом параметров как используемых двигателей, так и приве-
денных жесткостей трансмиссий. Разброс параметров системы приводит к различной реакции электриче-
ской и механической частей на одно и то же возмущающее воздействие. Особенно это проявляется в ди-
намических режимах и вызывает различие электромагнитных моментов двигателей, их скоростей враще-
ния, упругих моментов в трансмиссии и т.п.
Сформулируем условия и цель задачи управления.
Условия – имеется два однотипных асинхронных электродвигателя с короткозамкнутым рото-
ром, одноименные электромагнитные параметры которых могут различаться. Двигатели работают на
один вал (см. рисунок), причем приведенные к валам двигателей жесткости участков трансмиссий также
могут различаться. Двигатели получают питание от статических преобразователей частоты, работающих
в смысле формирования выходных частот и напряжений независимо друг от друга.
Цель – найти соотношения, связывающие между собой управляющие параметры двигателей (час-
тоты токов статоров и амплитуды питающих напряжений) с параметрами, характеризующими состояние
системы. Эти соотношения должны обеспечивать достижение экстремума некоторым функционалом,
выражающим цель управления и оценивающим качество управления или переходного процесса.
Запишем этот функционал в виде
()
()
−=
∫
∈γα∀
t
U,
t
dtMMinfJ
0
2
21
,
т.е. будем стремиться выравнивать электромагнитные моменты двигателей и при формулировке
задачи как вариационной на условный экстремум с подвижными границами образуем связи
97
()
()
()
()
()
=−+−
ω
=ω−ω−
=
−ΨΨ−ΨΨ
′
−
ω
=Ψω−ωα+Ψ
′
−Ψ
′
+
Ψ
=Ψω−ωα−Ψ
′
−Ψ
′
+
Ψ
=Ψωα+Ψ
′
−Ψ
′
+−
Ψ
=Ψωα−Ψ
′
−Ψ
′
+−
Ψ
.McMM
Jdt
d
,b
dt
dM
,M
L
k
p
Jdt
d
,pk
L
R
L
R
dt
d
,pk
L
R
L
R
dt
d
,k
L
R
L
R
U
dt
d
,k
L
R
L
R
U
dt
d
yy
ii
yi
yirvisuisvirui
si
ri
i
i
i
ruiiinisvisi
ri
ri
rvi
ri
rirvi
rviiinisuisi
ri
ri
rui
ri
rirui
suinirviri
si
si
svi
si
si
svi
svi
sviniruiri
si
si
sui
si
si
sui
sui
0
1
0
0
2
31
0
0
0
0
21
3
3
3
где i=1,2.
Вспомогательная функция H запишется
()()
()
()
() ()
() ()
() ()
()
()
()
()
.MMM
Jdt
d
t
b
dt
dM
t
M
L
k
p
Jdt
d
t
pk
L
R
L
R
dt
d
t
pk
L
R
L
R
dt
d
t
k
L
R
L
R
U
dt
d
t
k
L
R
L
R
U
dt
d
t
L
k
p
L
k
pH
сyy
i
ii
yi
i
i
yirvisuisvirui
si
ri
i
i
i
i
i
ruiiinisvisi
ri
ri
rvi
ri
rirvi
i
i
rviiinisuisi
ri
ri
rui
ri
rirui
i
i
suinirviri
si
si
svi
si
si
svi
svi
i
i
sviniruiri
si
si
sui
si
si
sui
sui
i
rvsusvru
s
r
rvsusvru
s
r
−+−
ω
λ+
+
ω−ω−λ+
+
−ΨΨ−ΨΨ
′
−
ω
λ+
+
Ψω−ωα+Ψ
′
−Ψ
′
+
Ψ
λ+
+
Ψω−ωα−Ψ
′
−Ψ
′
+
Ψ
λ+
+
Ψωα+Ψ
′
−Ψ
′
+−
Ψ
λ+
+
Ψωα−Ψ
′
−Ψ
′
+−
Ψ
λ+
+
ΨΨ−ΨΨ
′
−ΨΨ−ΨΨ
′
=
∑
∑
∑
∑
∑
∑
=
+
=
+
=
+
=
+
=
+
=
21
3
3
13
2
1
310
2
1
8
2
1
6
2
1
4
2
1
2
2
1
2
2222
2
2
21111
1
1
1
1
2
31
2
3
2
3
Образуем уравнения Эйлера
98
0 0 =
′
∂
∂
−
∂
∂
=
′
∂
∂
−
∂
∂
t
svi
svi
t
sui
sui
U
H
dt
d
U
H
,
U
H
dt
d
U
H
,
,
M
H
dt
d
M
H
,
H
dt
dH
,
H
dt
dH
t
yi
yi
t
j
j
t
i
i
0 0 0 =
′
∂
∂
−
∂
∂
=
′
ω∂
∂
−
ω∂
∂
=
′
α∂
∂
−
α∂
∂
0 0 =
′
Ψ∂
∂
−
Ψ∂
∂
=
′
Ψ∂
∂
−
Ψ∂
∂
t
svi
svi
t
sui
sui
H
dt
dH
,
H
dt
dH
,
0 0 =
′
Ψ∂
∂
−
Ψ∂
∂
=
′
Ψ∂
∂
−
Ψ∂
∂
t
rvi
rvi
t
rui
rui
H
dt
dH
,
H
dt
dH
,
где i=1,2, j=1,2,3.
Из первых четырех уравнений следует: λ
1
(t)=0, λ
2
(t)=0, λ
3
(t)=0, λ
4
(t)=0 и тогда вспомогательная
функция перепишется
()()
()
()
()
()
()
()
()
()()
()
.MMM
Jdt
d
tb
dt
dM
t
M
L
k
p
Jdt
d
t
pk
L
R
L
R
dt
d
t
pk
L
R
L
R
dt
d
t
L
k
p
L
k
pH
сyy
i
ii
yi
i
i
yirvisuisvirui
si
ri
i
i
i
i
i
ruiiinisvisi
ri
ri
rvi
ri
rirvi
i
i
rviiinisuisi
ri
ri
rui
ri
rirui
i
rvsusvru
s
r
rvsusvru
s
r
−+−
ω
λ+
ω−ω−λ+
+
−ΨΨ−ΨΨ
′
−
ω
λ+
+
Ψω−ωα+Ψ
′
−Ψ
′
+
Ψ
λ+
+
Ψω−ωα−Ψ
′
−Ψ
′
+
Ψ
λ+
+
ΨΨ−ΨΨ
′
−ΨΨ−ΨΨ
′
=
∑
∑
∑
∑
=
+
=
+
=
+
=
+
21
3
3
13
2
1
310
2
1
8
2
1
6
2
1
4
2
2222
2
2
21111
1
1
1
1
2
31
2
3
2
3
Из следующих уравнений
0=
′
α∂
∂
−
α∂
∂
t
i
i
H
dt
dH
получаем
() ()
.,i,tt
ruiirvii
21 0
64
=
=Ψλ+Ψλ−
++
Далее используем
0 =
′
ω∂
∂
−
ω∂
∂
t
j
j
H
dt
dH
и получаем также для j=1,2.
() ()
0
810
=λ−λ−
++
t
dt
d
tb
iii
.
Для j=3 будем иметь
() ()
.t
d
t
d
bt
ii
0
1310
=λ−λ
+
99
Теперь
0 =
′
∂
∂
−
∂
∂
t
yi
yi
M
H
dt
d
M
H
. Отсюда получаем
() () ()
.t
dt
d
J
t
J
t
i
i
i
0
11
10
3
138
=λ−
−λ+
λ
++
Из последних выражений следует
λ
i+8
(t)=0, λ
i+10
(t)=0, λ
13
(t)=0
и остается использовать
0 0 =
′
Ψ∂
∂
−
Ψ∂
∂
=
′
Ψ∂
∂
−
Ψ∂
∂
t
svi
svi
t
sui
sui
H
dt
dH
,
H
dt
dH
для
()()
()
()
()
()
∑
∑
=
+
=
+
Ψω−ωα+Ψ
′
−Ψ
′
+
Ψ
λ+
+
Ψω−ωα−Ψ
′
−Ψ
′
+
Ψ
λ+
+
ΨΨ−ΨΨ
′
−ΨΨ−ΨΨ
′
=
2
1
6
2
1
4
2
2222
2
2
21111
1
1
1
2
3
2
3
i
ruiiinisvisi
ri
ri
rvi
ri
rirvi
i
i
rviiinisuisi
ri
ri
rui
ri
rirui
i
rvsusvru
s
r
rvsusvru
s
r
pk
L
R
L
R
dt
d
t
pk
L
R
L
R
dt
d
t
L
k
p
L
k
pH
Пишем для этих условий
() ( )( )
,p
R
MMt
rvii
ri
i
i
Ψ−−=λ
+
3
1
214
() ( ) ( )
ruii
ri
i
i
p
R
MMt Ψ−−=λ
−
+
3
1
21
3
6
и далее с учетом условий трансверсальности
() ()
()
()
0
3
1
3
1
2
1
3
2
1
=
Ψω−ωα+
Ψ
Ψ−+
+
Ψω−ωα−
Ψ
Ψ−
∑
∑
=
−
=
i
ruiiini
rvi
ruii
ri
i
i
rviiini
rui
rvii
ri
i
p
dt
d
p
R
p
dt
d
p
R
или в итоге
1
2
2
2
12
212
22
1
11
r
r
r
r
nn
pR
pR
pp
Ψ
Ψ
ω
ω
−α+
ω
ω
=α
.
Последнее выражение определяет поведение одного двигателя в зависимости от состояния второ-
го. Это означает, что должен быть «ведущий» электродвигатель и «ведомый». Ниже приведены резуль-
таты моделирования и текст исходного модуля программы для исследования управляемого режима рабо-
ты двух асинхронных электродвигателей, работающих на общий вал через участки трансмиссий с раз-
личными приведенными жесткостями. Условно 1-й двигатель отслеживает значения электромагнитного
момента 2-го двигателя, реализуя полученную выше связь. Второй двигатель находится в в квазиопти-
мальном управляемом режиме
100
-300
-200
-100
0
100
200
300
400
500
600
700
800
0 0.2 0.4 0.6 0.8 1
t,C
M,Hm
M1
M2
' Учебные задачи кафедры ВТ
' Моделирование управления двумя электродвигателями
'============================================================
Option Explicit
Public j, N, i As Integer
Public Y0(), Y0I(), Yz(), Y0z(), _
Y(), F(), _
k1(), k2(), _
k3(), k4() As Single
Public x, X0z, X0, _
Xk, h, Hz, _
eps As Single
Public Rs1, Rr1, Xs1, Xr1, Xm1, _
l11, l21, lm1, w1, _
lps1, lpr1, ks1, kr1, _
p1, GD21, c1, Tvn, Tvu, _
alfa1, _
Rs2, Rr2, Xs2, Xr2, Xm2, _
l12, l22, lm2, w2, _
lps2, lpr2, ks2, kr2, _
p2, GD22, c2, _
alfa2, Mc, b1, b2 As Single
'===========================================================
Sub AD()
Dim Prom As Single
Dim Mess As String
N = 13
ReDim Y0(N), Y0I(N), Yz(N), Y0z(N), _
Y(N), F(N), _
k1(N), k2(N), k3(N), k4(N)
Mess = MsgBox("Управление двумя АД", , _
" Учебные задачи кафедры ВТ (Ещин Е.К.)")
eps = 0.0001: h = 0.002: Hz = h
X0 = 0: X0z = X0: h = Hz: Xk = 1
For i = 1 To N
Y0(i) = 0