Емельянов С.В. Новые типы обратной связи
Подождите немного. Документ загружается.

2.1.
Релейная
обратная
связь
71
2.1.2.
Скользящий режим в точке
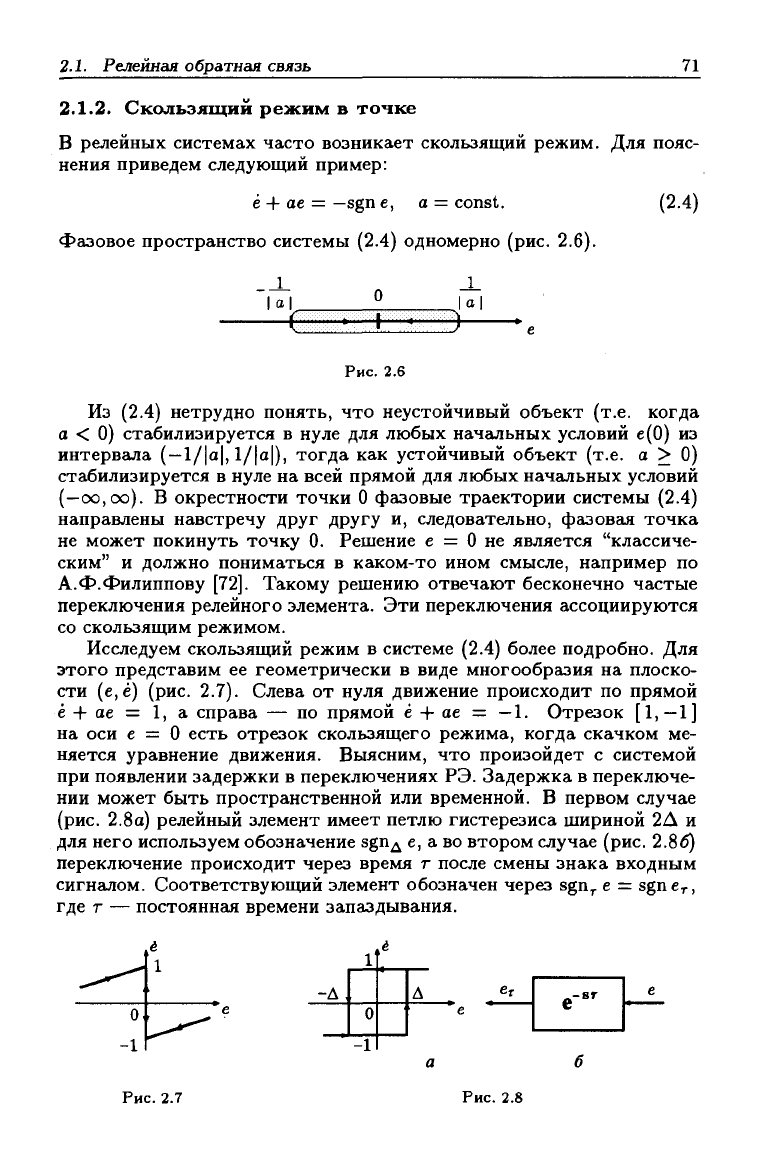
В релейных системах часто возникает скользящий режим. Для пояс-
нения приведем следующий пример:
ё + ае = —sgn е, а = const.
Фс13овое пространство системы (2.4) одномерно (рис. 2.6).
(2.4)
\а\
\а\
Рис.
2.6
Из (2.4) нетрудно понять, что неустойчивый объект (т.е. когда
а < 0) стабилизируется в нуле для любых начальных условий е(0) из
интервала
(—1/|а|,
1/|а|),
тогда как устойчивый объект (т.е. а > 0)
стабилизируется в нуле на всей прямой для любых начальных условий
(—оо,оо). В окрестности точки
О
фазовые траектории системы (2.4)
направлены навстречу друг другу и, следовательно, фазовая точка
не может покинуть точку 0. Решение е = О не является "классиче-
ским" и должно пониматься в каком-то ином смысле, например по
А.Ф.Филиппову [72]. Такому решению отвечают бесконечно частые
переключения релейного элемента. Эти переключения ассоциируются
со скользящим режимом.
Исследуем скользящий режим в системе (2.4) более подробно. Для
этого представим ее геометрически в виде многообразия на плоско-
сти (е,ё) (рис. 2.7). Слева от нуля движение происходит по прямой
ё-\- ае = 1, а справа — по прямой ё -f- ае = —1. Отрезок [1,-1]
на оси е = О есть отрезок скользящего режима, когда скачком ме-
няется уравнение движения. Выясним, что произойдет с системой
при появлении задержки в переключениях РЭ. Задержка в переключе-
нии может быть пространственной или временной. В первом случае
(рис.
2.8а) релейный элемент имеет петлю гистерезиса шириной 2Д и
для него используем обозначение sgnд е, а во втором случае (рис. 2.86)
переключение происходит через время г после смены знака входным
сигналом. Соответствующий элемент обозначен через sgn^ е = sgner,
где
т
— постоянная времени запаздывания.
"'
0
-1
Ри
1
с. 2.7
е
-Д
1
0
-1
д
а
бг
е
Рис.
2.8
е-"
б
72 Паава 2.
Некоторые
принципы
построения
нелинейных регуляторов
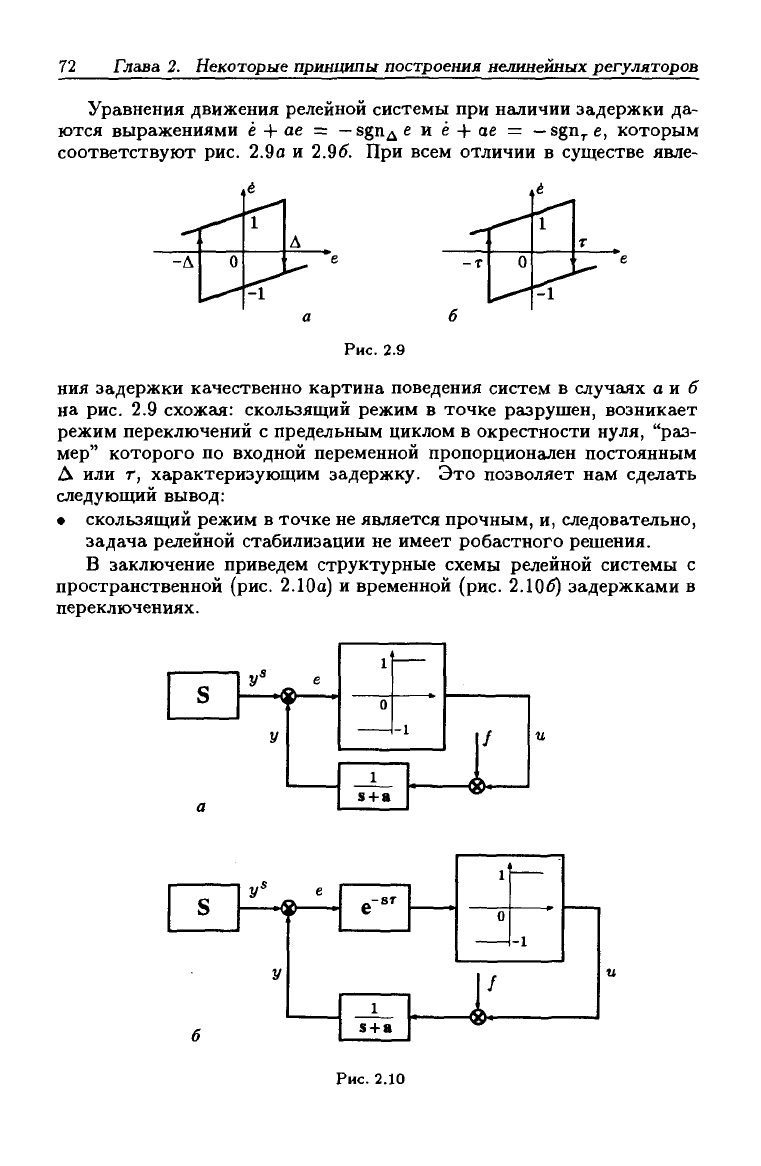
Уравнения движения релейной системы при наличии задержки да-
ются выражениями ё + ае =
—
8§пд е и ё + ае =
—
sgn^ е, которым
соответствуют рис. 2.9а и 2.9^. При всем отличии в существе явле-
-т
б
0
1
г
"-С
Рис. 2.9
ния задержки качественно картина поведения систем в случаях а и 5
на рис. 2.9 схожая: скользящий режим в точке разрушен, возникает
режим переключений с предельным циклом в окрестности нуля, "раз-
мер"
которого по входной переменной пропорционален постоянным
Д или г, характеризующим задержку. Это позволяет нам сделать
следующий вывод:
• скользящий режим в точке не является прочным, и, следовательно,
задача релейной стабилизации не имеет робастного решения.
В заключение приведем структурные схемы релейной системы с
пространственной (рис. 2.10а) и временной (рис. 2.106) задержками в
переключениях.
Ф-
s + a
Л . е
s + a
Рис. 2.10
2.1.
Релейная обратная связь
73
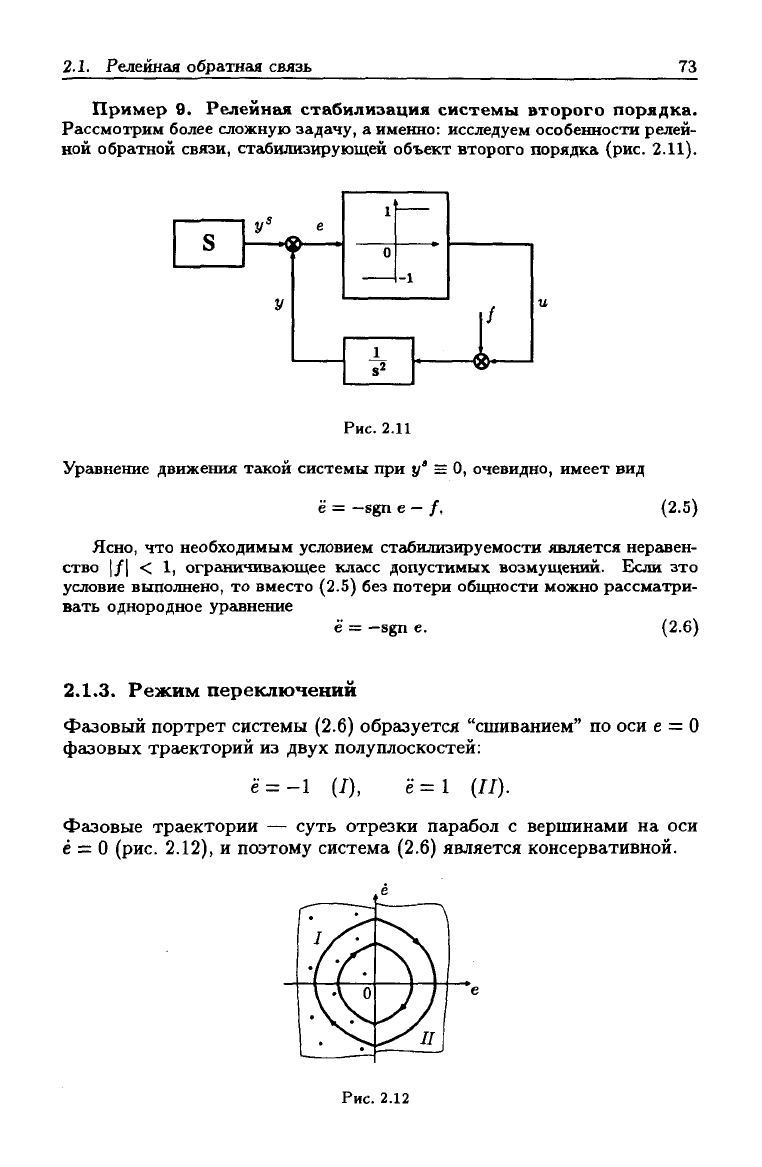
Пример 9. Релейная стабилизация системы второго порядка.
Рассмотрим более сложную задачу, а именно: исследуем особенности релей-
ной обратной связи, стг1билизирующей объект второго порядка (рис. 2.11).
S
У^ е
у
1
0
-1
1
«2
|/
. JL
Рис. 2.11
Ургшнение движения такой системы при у' = О, очевидно, имеет вид
ё = —sgn е
—
/, (2.5)
Ясно,
что необходимым условием стабилизируемости является нергшен-
ство 1/1 < 1, ограничивающее класс допустимых возмущений. Если это
условие выполнено, то вместо (2.5) без потери общности можно рассматри-
вать однородное уравнение
ё = —sgn е. (2.6)
2.1.3.
Режим переключений
Фазовый портрет системы (2.6) образуется "сшиванием" по оси е = О
фазовых трг1екторий из двух полуплоскостей:
ё = -1 (/), ё = 1 {II).
Фазовые траектории — суть отрезки парабол с вершинами на оси
6 = 0 (рис. 2.12), и поэтому система (2.6) является консервативной.
Рис. 2.12
74 Глава 2.
Некоторые
пршщипы
построения
нелинейных регуляторов
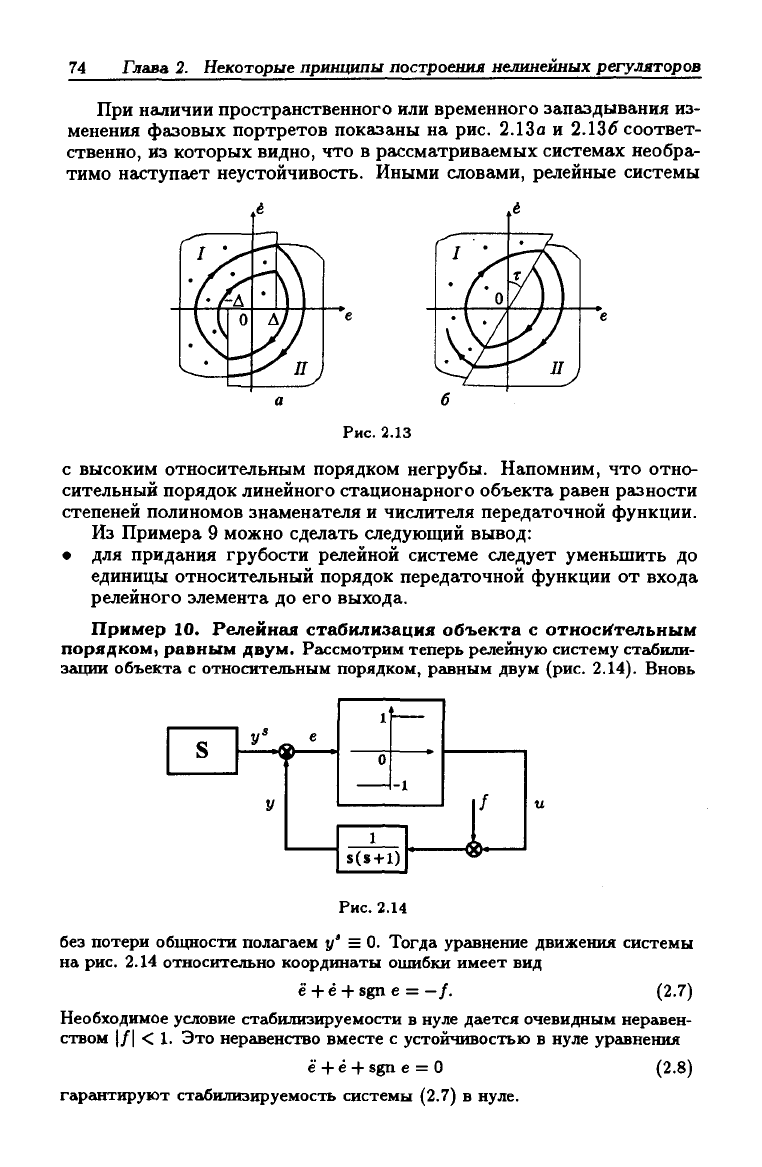
При наличии пространственного или временного запаздывания из-
менения фазовых портретов показаны на рис. 2.13а и 2.13^ соответ-
ственно, из которых видно, что в рассматриваемых системах необра-
тимо наступает неустойчивость. Иными словами, релейные системы
/ "^
• л V'
I'fb.
\
•
0
t
•
Ч }
'Уп)
Рис.
2.13
С ВЫСОКИМ относительным порядком негрубы. Напомним, что отно-
сительный порядок линейного стационарного объекта равен разности
степеней полиномов знаменателя и числителя передаточной функции.
Из Примера 9 можно сделать следующий вывод:
• для придания грубости релейной системе следует уменьшить до
единицы относительный порядок передаточной функции от входа
релейного элемента до его выхода.
Пример 10. Релейная стабилизация объекта с относительным
порядком, равным двум. Рассмотрим теперь релейную систему стабили-
зации объекта с относительным порядком, равным двум (рис. 2.14). Вновь
S -^
е
J—
1
0
1
s(s + ]
1
ш
-1
) —
|/
i.
Рис.
2.14
без потери общности полгъгаем
j/'
= 0. Тогда уравнение движения системы
на рис. 2.14 относительно координаты ошибки имеет вид
ё
-I-
ё
-I-
sgn е = -/. (2.7)
Необходимое условие стабилизируемости в нуле дается очевидным неравен-
ством 1/1 < 1. Это неравенство вместе с устойчивостью в нуле уравнения
ё
-I-
ё
-I-
sgn е =
О
(2.8)
гаргштируют стг1билизируемость системы (2.7) в нуле.
2.1.
Релейная обратная связь 75
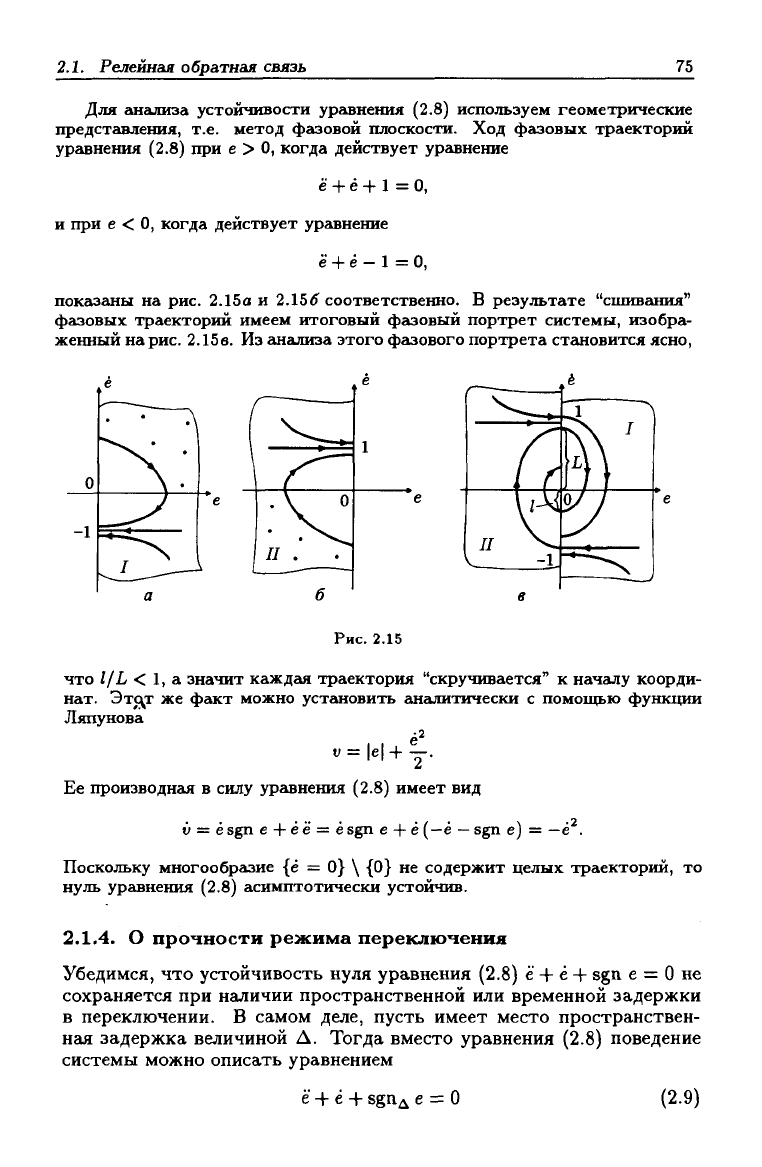
Для анёишза устойчивости уравнения (2.8) используем геометрические
представления, т.е. метод фгкзовой плоскости. Ход фазовых траекторий
уравнения (2.8) при е > О, когда действует уравнение
ё + ё +
1
= О,
и при е < о, когда действует уравнение
ё + ё - 1 = О,
показаны на рис. 2.15а и 2.156 соответственно. В результате "сшивания"
фазовых траекторий имеем итоговый фазовый портрет системы, изобра-
женный на рис. 2.15в. Из ангишза этого фазового портрета становится ясно.
Рис.
2.15
что 1/L < 1, а значит каждая траектория "скручивается" к началу коорди-
нат. Этс(,т же факт можно установить аналитически с помощью функции
Ляпунова
-|e|
+
f
Ее производная в силу уравнения (2.8) имеет вид
i) = esgn е -f- её = esgn е -Ь ё(—ё
—
sgn е)
• 2
-е .
Поскольку многообразие {ё = 0} \ {0} не содержит целых траекторий, то
нуль уравнения (2.8) асимптотически устойчив.
2.1.4. О прочности рехсима переключения
Убедимся, что устойчивость нуля уравнения (2.8) ё-\- ё + sgn е =
О
не
сохраняется при наличии пространственной или временной задержки
в переключении. В самом деле, пусть имеет место пространствен-
ная задержка величиной Д. Тогда вместо уравнения (2.8) поведение
системы можно описать уравнением
ё + ё+ sgnд е = О
(2.9)
76 Глава 2.
Некоторые
принципы
построения
нелинейных регуляторов
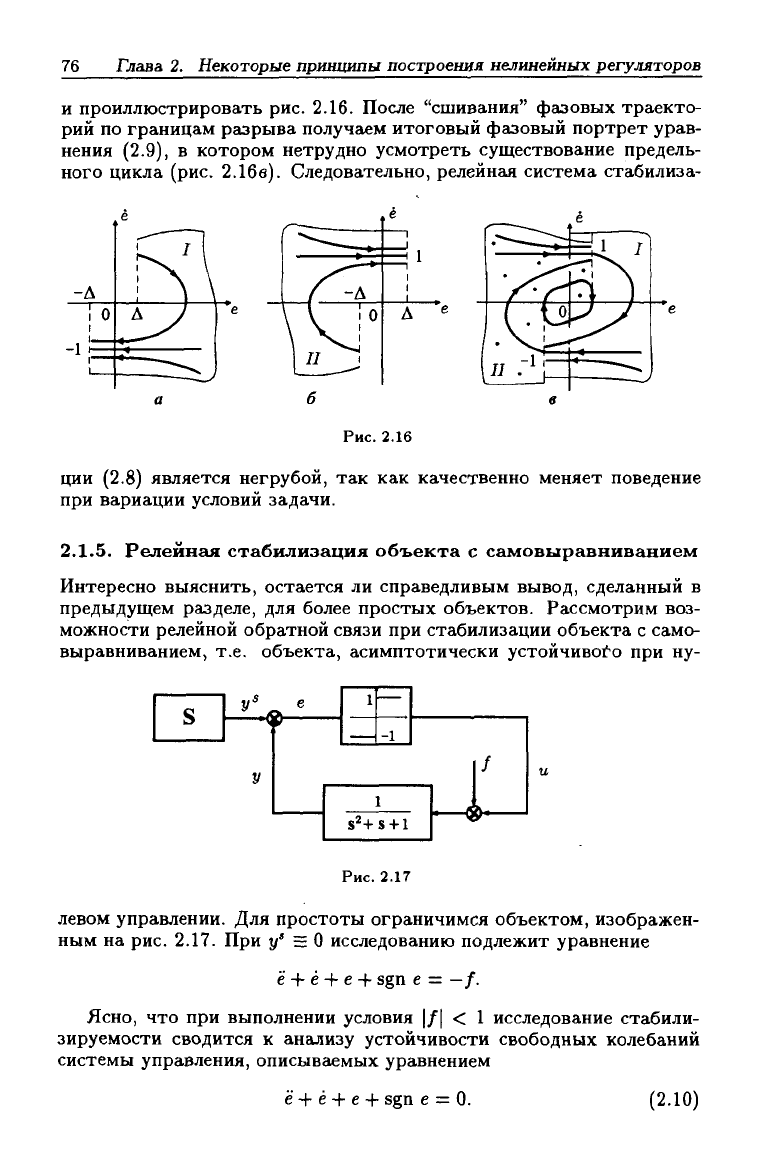
и проиллюстрировать рис. 2.16. После "сшивания" фазовых траекто-
рий по границам разрыва получаем итоговый фмовый портрет урав-
нения (2.9), в котором нетрудно усмотреть существование предель-
ного цикла (рис. 2.16в). Следовательно, релейная система стабилиза-
Рис. 2.16
ции (2.8) является негрубой, так как качественно меняет поведение
при вариации условий задачи.
2.1.5.
Релейная стабилизация объекта с самовыравниванием
Интересно выяснить, остается ли справедливым вывод, сделанный в
предыдущем разделе, для более простых объектов. Рассмотрим воз-
можности релейной обратной связи при стабилизации объекта с само-
выравниванием, т.е. объекта, асимптотически устойчивого при ну-
S
у« ^ е
"i
У
V
1
-1
1
s^+s+1
J
' Q
/
9'
Рис. 2.17
левом управлении. Для простоты ограничимся объектом, изображен-
ным на рис. 2.17. При у' =
О
исследованию подлежит уравнение
ё + ё + е + sgn е = —/.
Ясно,
что при выполнении условия |/| < 1 исследование стабили-
зируемости сводится к анализу устойчивости свободных колебаний
системы управления, описываемых уравнением
ё + ё + е + sgn е = 0.
(2.10)
2.1.
Релейная
обратная
связь
77
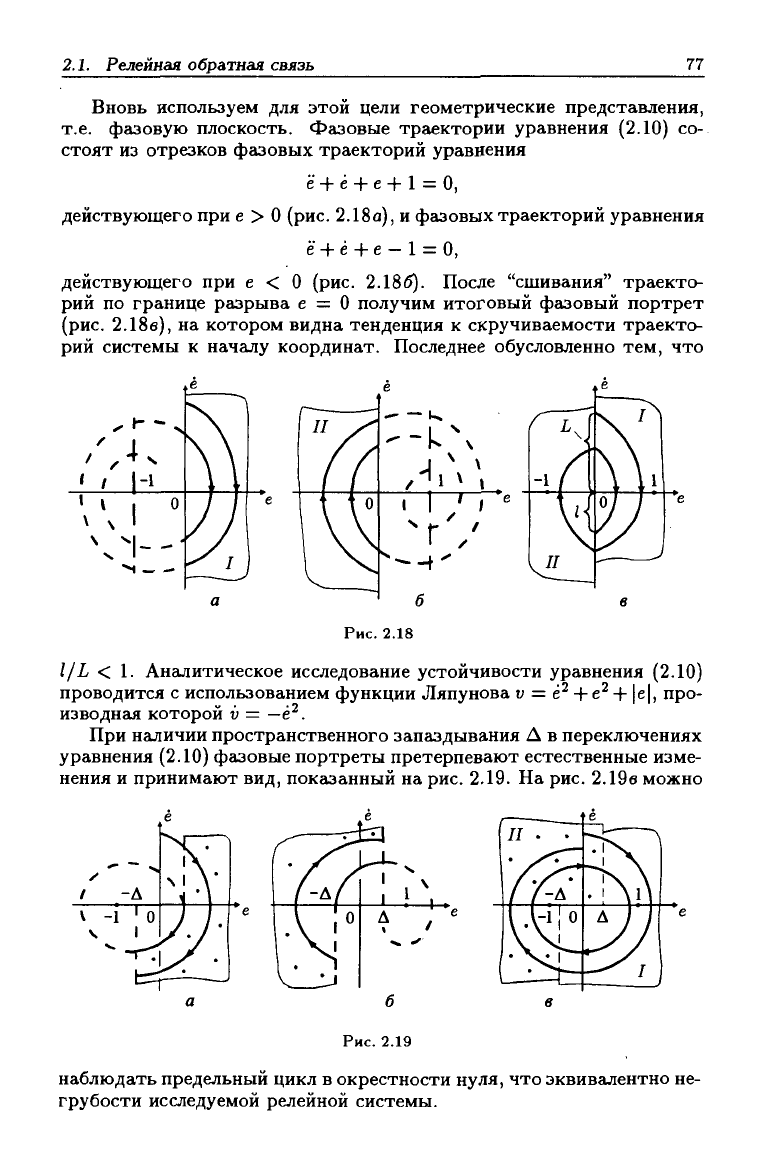
Вновь используем для этой цели геометрические представления,
т.е.
фазовую плоскость. Фазовые траектории уравнения (2.10) со-
стоят из отрезков фазовых траекторий уравнения
ё +
ё
+
е
+
1
=
О,
действующего при е >
О
(рис. 2.18а), и фазовых траекторий уравнения
ё-|-ё-|-е-1
= 0,
действующего при е < О (рис. 2.186). После "сшивания" траекто-
рий по границе разрыва е = О получим итоговый фазовый портрет
(рис.
2.18б), на котором видна тенденция к скручиваемости траекто-
рий системы к началу координат. Последнее обусловленно тем, что
Рис.
2.18
1/L < 1. Ангшитическое исследование устойчивости уравнения (2.10)
проводится с использованием функции Ляпунова v = Р -\-е^ + \е\, про-
изводная которой i) = —ё^.
При нашичии пространственного запаздывания Д в переключениях
уравнения (2.10) фазовые портреты претерпевают естественные изме-
нения и принимают вид, показанный на рис. 2.19. На рис. 2.19в можно
наблюдать предельный цикл в окрестности нуля, что эквивалентно не-
грубости исследуемой релейной системы.
78 Глава 2. Некоторые принципы построения нелинейных регуляторов
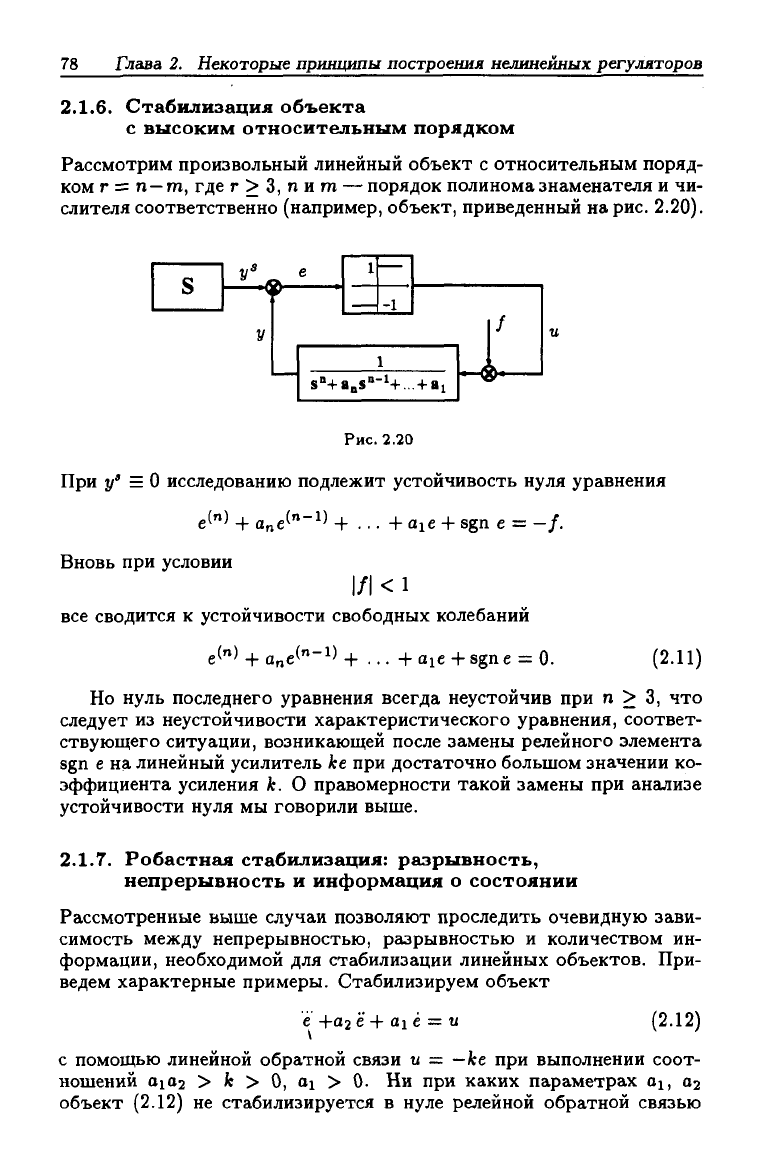
2.1.6. Стабилизация объекта
с высоким относительным порядком
Рассмотрим произвольный линейный объект с относительным поряд-
ком г = п
—
тп,
где г > 3, п и m — порядок полинома знаменателя и чи-
слителя соответственно (например, объект, приведенный карие. 2.20).
S
'\
•V
у
•ж
е
9
1
-1
1
s"+anS°"4.
.
+ ai
/
•—(ar——
Рис. 2.20
При у* =
О
исследованию подлежит устойчивость нуля уравнения
е("'
-I-
а„е("~^' -|- ... + aje -Ь sgn е = -/.
Вновь при условии
все сводится к устойчивости свободных колебаний
е(") + а„е<"~^) + ..
•
+ aie -f- sgn
е
= 0.
(2.11)
Но нуль последнего уравнения всегда неустойчив при п > 3, что
следует из неустойчивости характеристического уравнения, соответ-
ствующего ситуации, возникающей после замены релейного элемента
sgn е на линейный усилитель ке при достаточно большом значении ко-
эффициента усиления к. О правомерности такой замены при анализе
устойчивости нуля мы говорили выше.
2.1.7. Робастная стабилизация: разрывность,
непрерывность и информация о состоянии
Рассмотренные выше случаи позволяют проследить очевидную зави-
симость между непрерывностью, разрывностью и количеством ин-
формации, необходимой для стабилизации линейных объектов. При-
ведем характерные примеры. Стабилизируем объект
е -(-02 ё +
От
ё = и (2.12)
с помощью линейной обратной связи и — —ке при выполнении соот-
ношений 0102 > fc > О, oi > 0. Ни при каких параметрах oi, 02
объект (2.12) не стабилизируется в нуле релейной обратной связью
2.1.
Релейная
обратная
связь
79
U = —sgn е. Если, однако, в закон релейной обратной связи ввести
дополнительную информацию о производных е и ё, например
u = -sgn(e + e),
U
=-sgn(e + e + e),
то устойчивость нуля при 01,02 > о будет обеспечена. Иными сло-
вами,
• существуют ситуации, когда переход от разрывного элемента к
непрерывному, в частности, к линейному элементу не только по-
вышает прочность системы управления, но и позволяет решить
задачу при меньшем объеме информации о ее состоянии.
Аналогичная зависимость существует между прочностью системы
и непрерывностью ее нелинейных элементов. Для пояснения рассмо-
трим уравнение
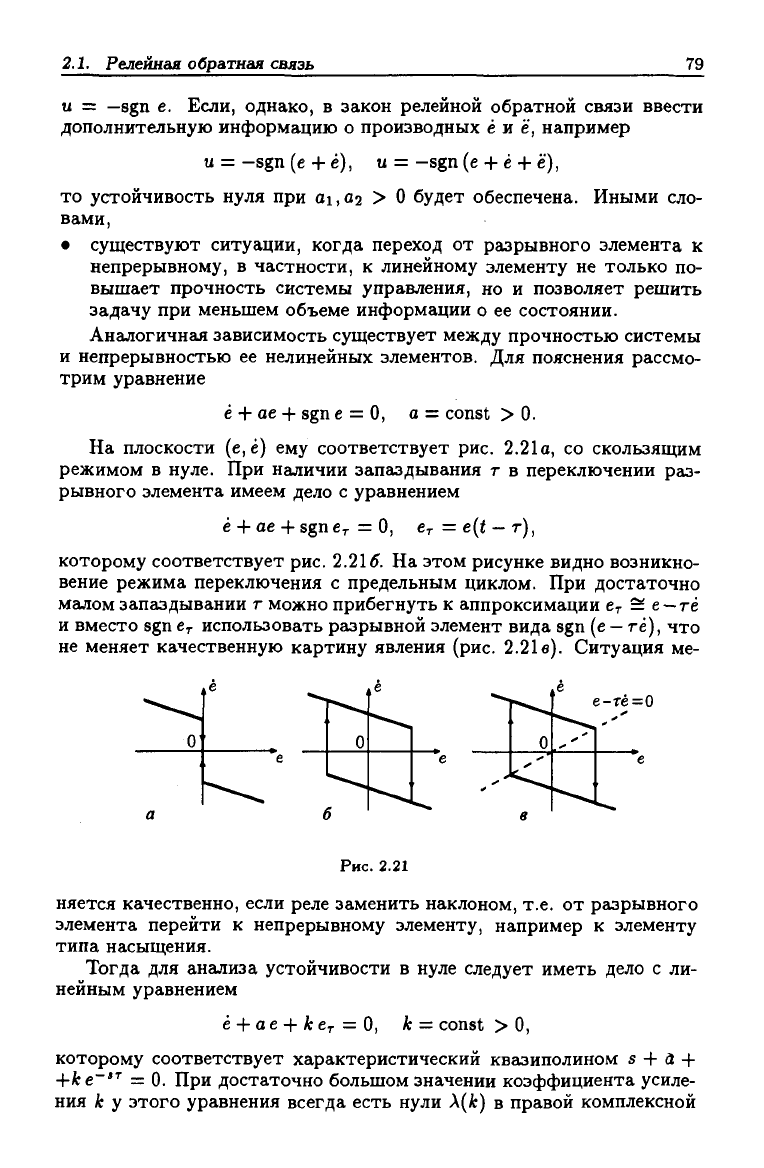
ё -Ь ое 4- sgn е = О, а = const > 0.
На плоскости (е,ё) ему соответствует рис. 2.21а, со скользящим
режимом в нуле. При наличии запаздывания г в переключении раз-
рывного элемента имеем дело с уравнением
ё-Ьае-t-sgnCr = О, er=e(f-r),
которому соответствует рис. 2.216. На этом рисунке видно возникно-
вение режима переключения с предельным циклом. При достаточно
малом запаздывании
т
можно прибегнуть к аппроксимации е^ =
е —
гё
и вместо sgnвт использовать разрывной элемент вида sgn (е
—
те), что
не меняет качественную картину явления (рис. 2.21в). Ситуация ме-
е-гё=0
Рис. 2.21
няется качественно, если реле заменить наклоном, т.е. от р£1зрывного
элемента перейти к непрерывному элементу, например к элементу
типа насыщения.
Тогда для анализа устойчивости в нуле следует иметь дело с ли-
нейным уравнением
ё-\- ае + кбт =
О,
к = const > О,
которому соответствует характеристический квазиполином s -|- а +
+ке~''^ = 0. При достаточно большом значении коэффициента усиле-
ния к у этого уравнения всегда есть нули \{к) в правой комплексной
80
Глава 2.
Некоторые
принципы
построения
нелинейных регуляторов
полуплоскости, стремящиеся при к
—>
оо к нулям уравнения е~'^ = 0.
Последние, очевидно, имеют положительные вещественные части.
С другой стороны, если к конечно, а г мало, то с помощью аппрокси-
мации е"*'' к
1—ST
анализ устойчивости можно свести к исследованию
полинома первого порядка (1
— кт)
s + а +
Аг
= 0. Очевидно, что при
выполнении неравенств
1 —
А:г>0, а + Аг>0 наступает устойчивость,
т.е.
предельный цикл исчезает.
Подводя итог исследованию, можно сделать вывод о том, что ре-
лейная стабилизация годится только для объектов с относительным
порядком г < 2. Поскольку стабилизация при г = п
—
m = 2 была рас-
смотрена выше, то теперь можно исследовать особенности релейной
стабилизации при г = п
—
т = 1.
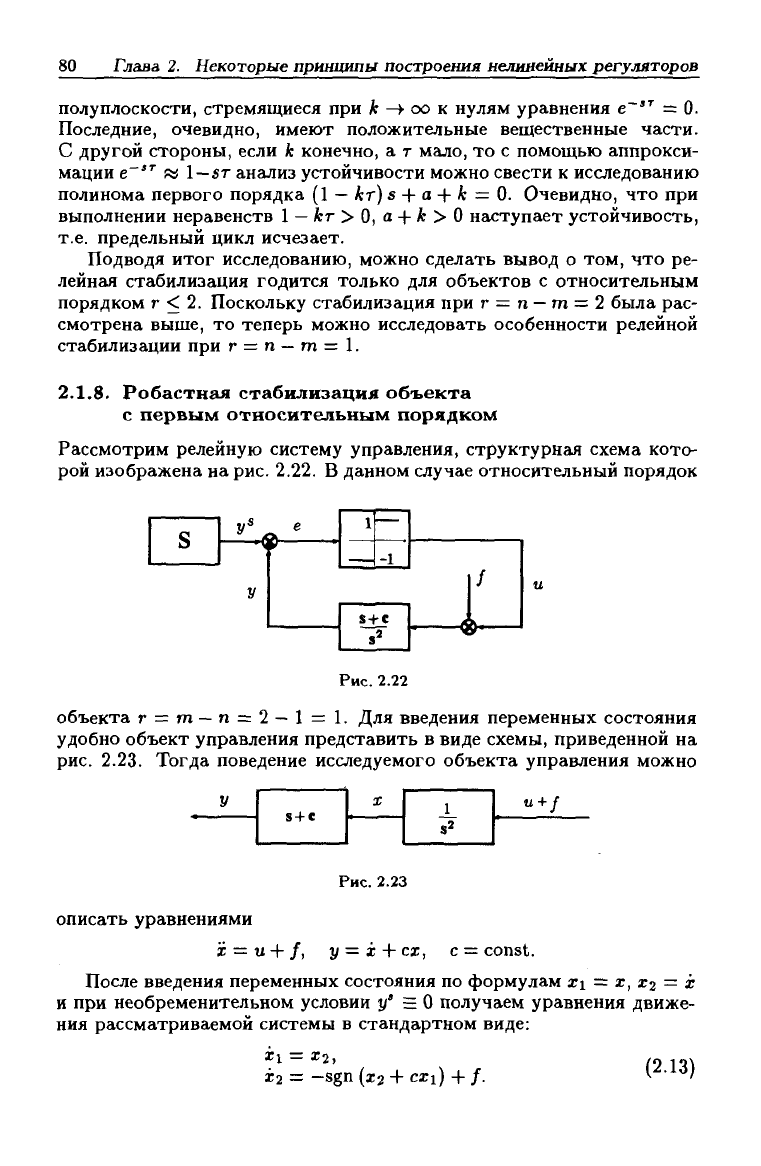
2.1.8. Робастная стабилизация объекта
с первым относительным порядком
Рассмотрим релейную систему управления, структурная схема кото-
рой изображена на рис. 2.22. В данном случае относительный порядок
А.
S + C
и
и
Рис.
2.22
объекта г = т
—
п = 2—1 = 1. Для введения переменных состояния
удобно объект управления представить в виде схемы, приведенной на
рис.
2.23. Тогда поведение исследуемого объекта управления можно
S + C
U+/
Рис.
2.23
описать уравнениями
i =
w
4-
/, у = х + сх,
const.
После введения переменных состояния по формулам ц = х, Х2 = х
и при необременительном условии у' =
О
получаем уравнения движе-
ния рассматриваемой системы в стандартном виде:
XI = Х2,
Х2 = -Sgn (Г2 -I- CXi) -I- /.
(2.13)