Емельянов С.В. Новые типы обратной связи
Подождите немного. Документ загружается.

1.7. Глубокая обратная связь
61
Если, например, р(«) = 1, то с неизбежностью q(s) = 1, и все определяется
устойчивостью полинома
(fik{s) = л^ + (Ai + А2)з + А1А2 + *;,
которгм на^ступает только при выполнении неравенства
Ai +
Аг
> 0.
Ясно,
что последнее нергшенство может и не выполняться. Если же
р{з) = л + с, где с = const > О, то при q(s) = 1 устойчивость полинома
4>k{s)
=
3^
+ [{Xi +
Х2)
+ к]
S
+
Х1Х2
+ кс
наступает при любых параметрах Ai, А2 и достаточно большом значении
коэффициента обратной связи к. При этом следует обратить внимание на
то,
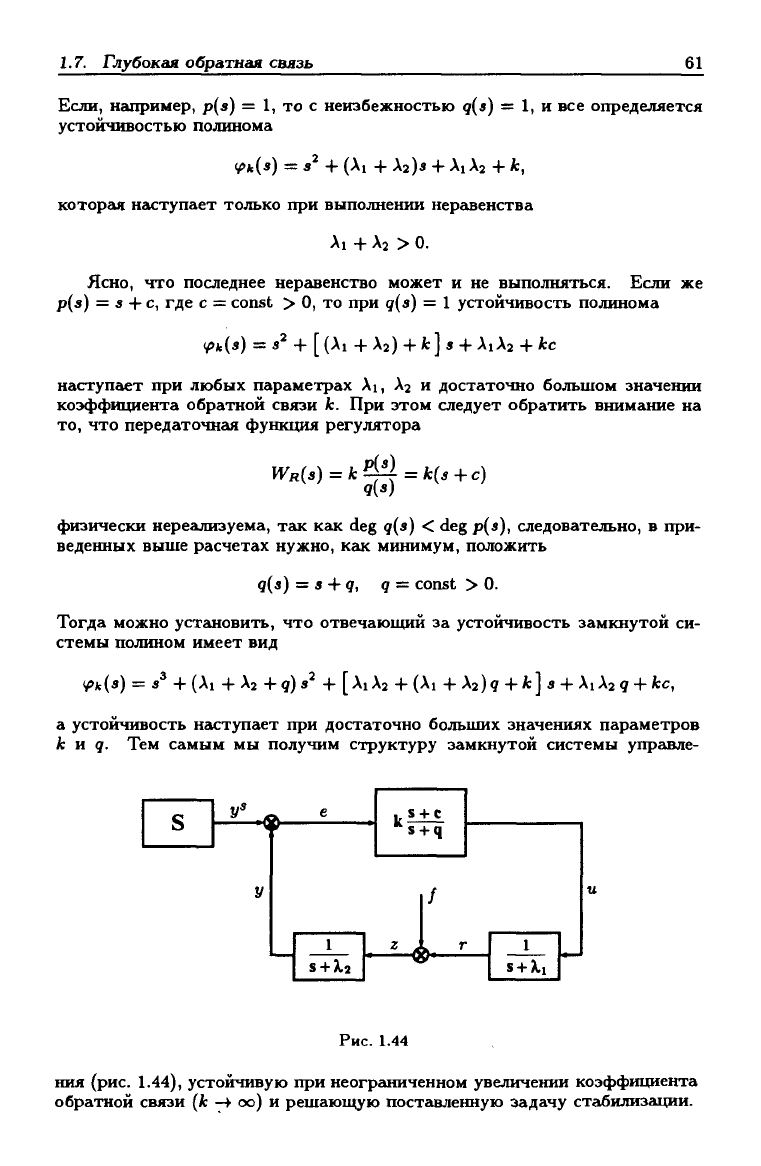
что передаточнги! функция регулятора
физически нереализуема, так как deg q(s) < deg р{з), следовательно, в при-
веденных выше расчетах нужно, как минимум, положить
q(s) = 3 + q, q = const > 0.
Тогда можно установить, что отвечающий за устойчивость замкнутой си-
стемы полином имеет вид
4>k{s)
= 3^ + {Xi +
Х2
+ q)
3'^
+ [А1А2 + (Ai -I-A2)g-|-fc] 3-f-AiA2g-f-fcc,
a устойчивость наступает при достаточно больших значениях параметров
к
тл
q. Тем самым мы получим структуру замкнутой системы управле-
у'
^
s
+
c
s
+
q
1
S + X2
^ 6
" Ч
f
у'
1
s + Xi
Рис.
1.44
ния (рис.
1.44),
устойчивую при неограниченном увеличении коэффициента
обратной связи {к
—>•
оо) и решающую поставленную задачу стабилизации.
62 Глава 1. Принципы построения линейных
систем
1.7.3. О грубости систем с глубокой обратной связью
Рассмотрим влияние двух типов вариаций оператора объекта:
• регулярных вариаций, или вариаций параметров;
• нерегулярных вариаций или сингулярных возмущений, меняющих
порядок объекта.
Для анализа последствий, которые имеют место при регулярных воз-
мущениях, достаточно обратиться к полиному
ipk{s) = a{s) q{s) + kb{s) p{8),
отвечающему за устойчивость замкнутой системы. Очевидно, что
если полиномы ^б,р(«) = b(s)p(s) и ipk{s) гурвицевы (последний при
достаточно большом значении к), то, в силу непрерывной зависимости
спектра от параметров, малые изменения параметров полиномов a(s)
и b{s) (т.е. параметров объекта) не меняют ситуацию качественно%
Иными словами,
• системы с глубокой обратной связью грубы по отношению к регу-
лярным возмущениям.
При сингулярном возмущении меняется порядок объекта, напри-
мер,
вместо передаточной функции W{s) = b{s)/a{s) мы имеем дело с
передаточной функцией вида
WAS) = -7^,
a{s) T(S)
где T(S) — некоторый устойчивый, но неизвестный полином степени
не ниже первой, т.е. deg T(S) > 1. Тогда за устойчивость замкнутой
системы отвечает полином вида
<Рк («)
= •г(«) a{s) q(s) + kb{s) p(s)
и ясно, что если имеет место неравенство deg T{S) > 2, то для физи-
чески реализуемой обратной связи полином fl{s) всегда неустойчив
при fc -> оо. Надежда на устойчивость сохраняется только тогда,
когда deg T{S) = 1. Но и эта надежда призрачна, так как порядок
реального объекта всегда выше порядка его математической модели
и,следовательно,
• практическое использование глубокой обратной связи всегда ведет
к неустойчивости.
Следовательно, значение коэффициента усиления, предельно допу-
стимого по соображениям устойчивости, ограничено некоторым кри-
тическим значением kct, т.е. О < к < к„. Последнее, разумеется, не
позволяет полностью устранить влияние возмущения / на регулиру-
емую координату у и, как следствие, добиться требуемого равенства
у = у', т.е. не позволяет точно решать задачу стабилизации. Иными
словами,
• системы с глубокой обратной связью негрубы по отношению к син-
гулярным возмущениям.
1.7. Глубокая
обратная
связь
63
Пример 7. Неустойчивость систем с обратной связью по от-
ношению к сингулярным возмущениям. Пусть в системе с обратной
связью (Пример 6) имеется действующее указанным выше способом сингу-
лярное возмущение с оператором
т(а) = гз +
1,
г = const > 0.
Тогда полином замкнутой системы упргъвления описывается выражением
ifil{s) =
{тз
+ 1){з + \2){з + Ai)(s +
д)
+ к{з + с)
и ясно, что ни при кгисом положительном значении г он не может быть
гурвицевым при /с -> оо. Таким образом, построенная в Примере 6 система
стабилизгщии неработоспособна при к -^ оо. Заметим, что при к <
кет
полином
(р^(з)
устойчив, однако требуемое равенство у = у' не выполняется
и, более того, ощибка стабилизащш зависит от возмущения f{t).
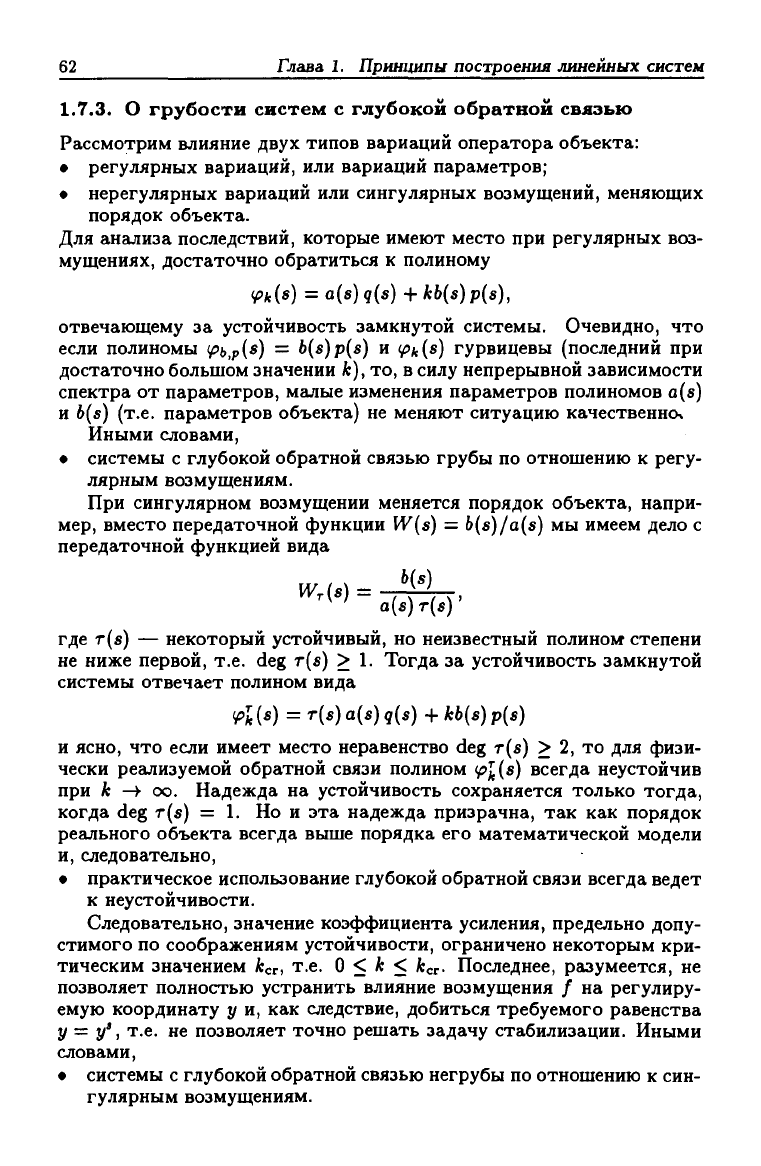
Выясним, что принципиально нового вносит в полученные резуль-
таты дополнительная прямая связь по нагрузке в соответствии со схе-
•^
kR
Рх
—^
Рис.
1.45
мой, представленной на рис. 1.45. Отвечающие этой структуре урав-
нения имеют вид
y = P2{f + r), r=Pi{u + u'), u'=Qy', u = kR{y'-y).
После исключения переменных и, и' и г находим искомую связь между
переменными у, у' и / в виде
{l + kPR)y = P2f + {kPR + PQ)y'.
Из этого выражения следует, что рассматриваемая прямг1я связь
по нагрузке не влияет на устойчивость системы, так как отвечающий
за устойчивость полином 1 -f- kPR не зависит от оператора Q. Точ-
ность компенсации возмущения / также не зависит от оператора Q.
Польза от прямой связи состоит в том, что при конечном коэффи-
циенте усиления (к 4С ^сг) с помощью оператора Q можно повысить
точность поддержания требуемого равенства у = у'.
64 Глава I. Принципы
построения
линейных
систем
1.7.4. Метод пространства состояний
в €кналнзе систем с глубокой обратной связью
Решим задачу стабилизации объекта из Примера 6 (рис. 1.42) мето-
дами пространства состояний. Дифференциальные уравнения, опи-
сывающие объект в пространстве состояний, имеют вид
У
+
\2У=/+г,
(1.42)
г-\- Air = и.
Применим оператор d/dt+Xi к уравнению (1.42), полагая, конечно,
дифференцируемость функции /. Тогда, используя стандартные обо-
значения
a2 = Ai-bA2, ai = А1А2,
уравнение объекта можно записать следующим образом:
y + a2y + aiy=F + u, (1.43)
где F = f + Xyf — возмущение, приведенное ко входу объекта, т.е. к
управляющему входу. Пусть
у'
+ а2у' + aiy' =Y'.
Вычтем из этого выражения уравнение объекта (1-43) и, так как
е = у"
—
у, получим в результате уравнение объекта в отклонениях:
ё + огё + aie = Y' - F -и.
Определим декартовы координаты xi = е, жг = ^ и запишем урав-
нения объекта управления в фазовом пространстве (xi,a;2)- Имеем
XI = Х2) ^2 = —iiaJi
—
ога^г
—
и + У
—
F.
При обратной связи
и = ка, а =
Х2
+ cxj, с = const > О,
получаем замкнутую систему управления вида
ii = Х2, Х2 = -aixi - агхг - к{х2 + cxi) + Y' - F. (1-44)
При к -> оо последнее дифференциальное уравнение вырождается в
алгебраическое уравнение X2-f-cxi = 0. После подстановки
Х2
= —cxi в
дифференциальное уравнение (144), получаем уравнение предельного
движения в виде
Xi = —CXi.
Поскольку это уравнение экспоненциально устойчиво, а
у'
-y = e = xi,
то у*
—
у
—>
О, и задача стабилизации тем самым решена.
1.7. Глубокая
обратная
связь
65
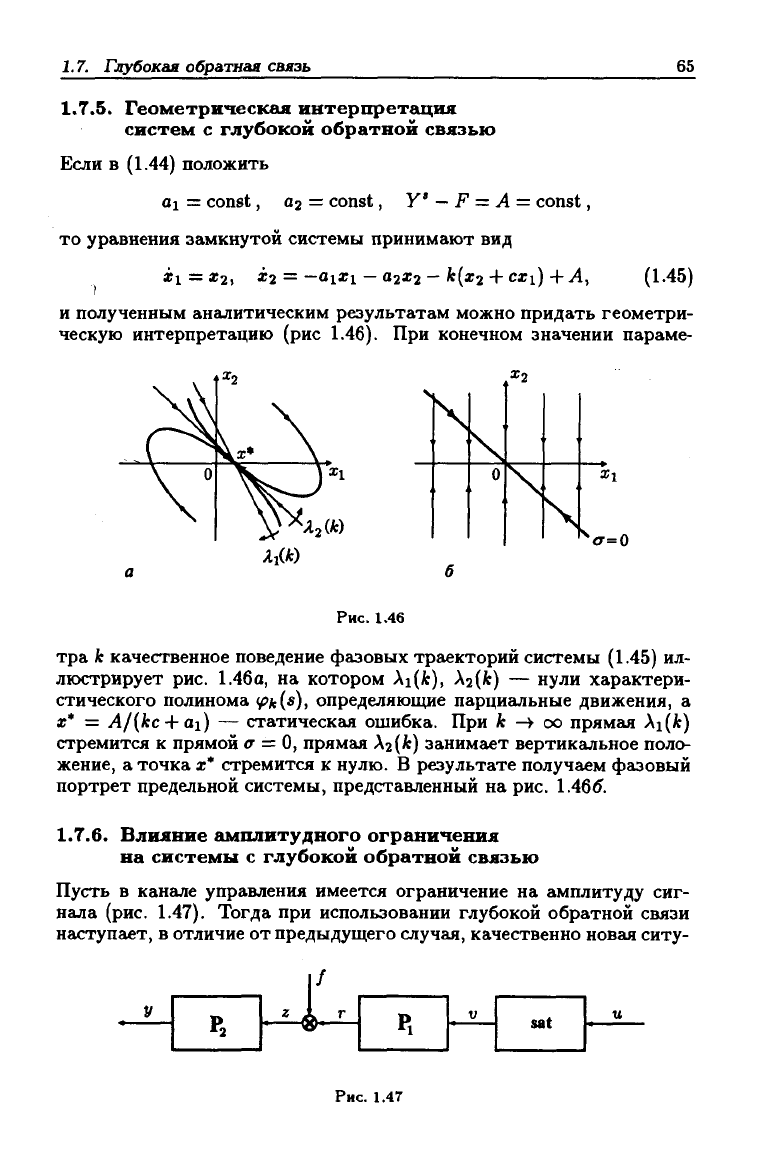
1.7.5. Геометрическая интерпретация
систем с глубокой обратной связью
Если в (1.44) положить
oi = const, 02 = const, Y'
—
F = А = const,
TO уравнения замкнутой системы принимают вид
ii = ar2, Х2 =-aiXi-a2X2-k(x2 + cxi)+А, (1-45)
и полученным аналитическим результатам можно придать геометри-
ческую интерпретацию (рис
1.46).
При конечном значении параме-
^
\ °
^2
Чг»
pi
У^Л2(к)
Нк)
а=0
Рис. 1.46
тра к качественное поведение фазовых траекторий системы (145) ил-
люстрирует рис.
1.46а,
на котором Ai(fc), A2(fc) — нули характери-
стического полинома
<ph{s),
определяющие парциальные движения, а
X* = A/{kc + ai) — статическая ошибка. При Л -> ос прямая Ai(fc)
стремится к прямой
<т
= О, прямая Х2(к) занимг1ет вертикальное поло-
жение, а точка х* стремится к нулю. В результате получаем фазовый
портрет предельной системы, представленный на рис.
1.466.
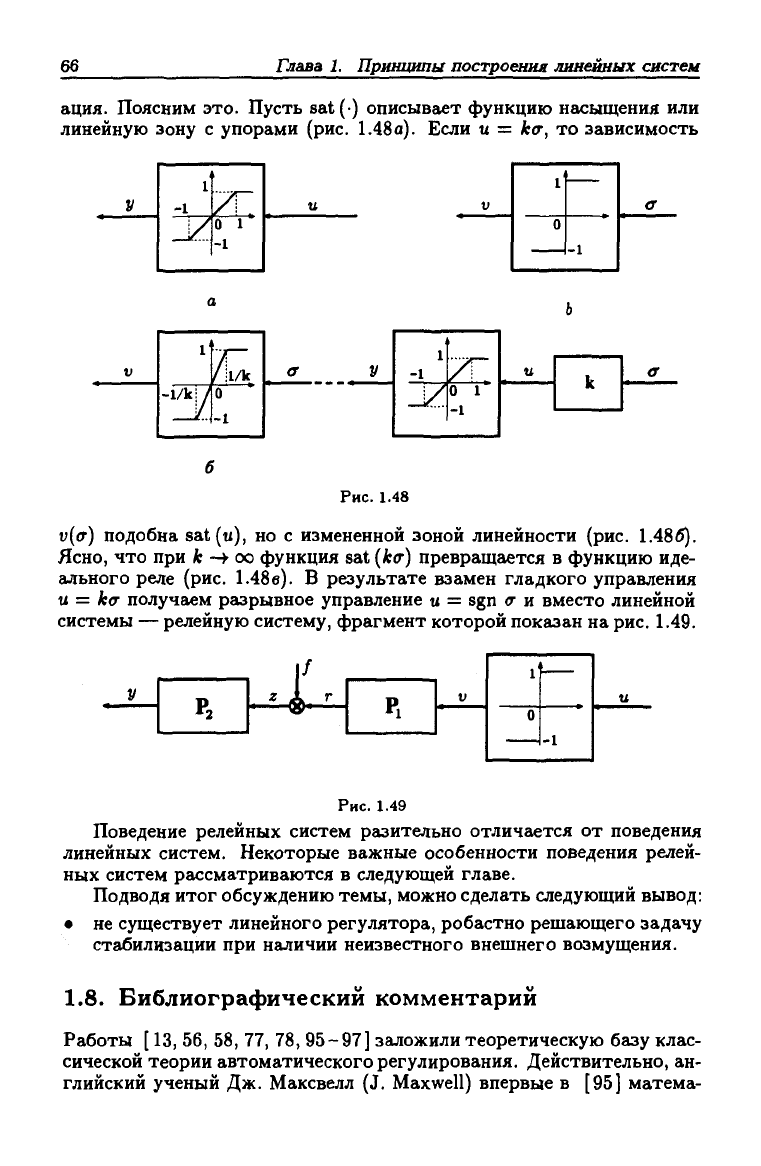
1.7.6.
Влияние амплитудного ограничения
на системы с глубокой обратной связью
Пусть в канале управления имеется ограничение на амплитуду сиг-
нала (рис.
1.47).
Тогда при использовании глубокой обратной связи
наступает, в отличие от предыдущего случая, качественно новая ситу-
•i-^-TT
sat
Рис. 1.47
66
Глава 1. Принципы
построения
линейных
систем
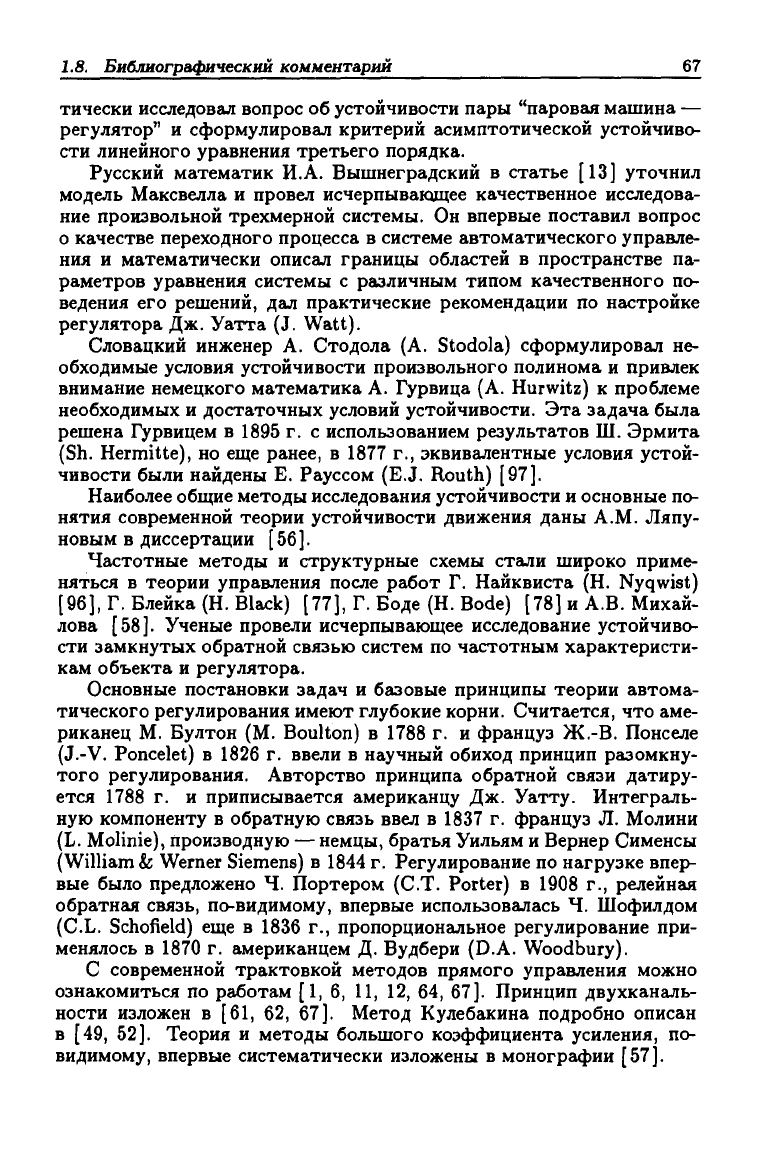
ация. Поясним это. Пусть sat (•) описывает функцию насыщения или
линейную зону с упорами (рис.
1.48а).
Если и = fc<r, то зависимость
V
к
1
-1
J/.
0 1"
-1
U
-I
к
1
.. .;,
-1 / !
0 Г
-1
U
к
а
Рис. 1.48
v{<j)
подобна sat(«), но с измененной зоной линейности (рис.
1.486).
Ясно,
что при Л -4 00 функция sat {ко) превращается в функцию иде-
ального реле (рис.
1.48в).
В результате взамен гладкого управления
и =
к(т
получаем разрывное управление и = sgn
сг
и вместо линейной
системы — релейную систему, фрагмент которой показан на рис. 1.49.
г
L.
Рг
V
1
0
.
-1
U
Рис. 1.49
Поведение релейных систем разительно отличается от поведения
линейных систем. Некоторые важные особенности поведения релей-
ных систем рассматриваются в следующей главе.
Подводя итог обсуждению темы, можно сделать следующий вывод:
• не существует линейного регулятора, робастно решающего задачу
стабилизации при наличии неизвестного внешнего возмущения.
1.8. Библиографический комментарий
Работы
[
13,
56, 58, 77, 78, 95-97] заложили теоретическую базу клас-
сической теории автоматического регулирования. Действительно, ан-
глийский ученый Дж. Максвелл (J. Maxwell) впервые в [95] матема-
1.8. Библиографический комментарий 67
тически исследовал вопрос об устойчивости пары "паровая машина —
регулятор" и сформулировал критерий асимптотической устойчиво-
сти линейного уравнения третьего порядка.
Русский математик И.А. Вышнеградский в статье [13] уточнил
модель Максвелла и провел исчерпывающее качественное исследова-
ние произвольной трехмерной системы. Он впервые поставил вопрос
о качестве переходного процесса в системе автоматического управле-
ния и математически описал границы областей в пространстве па-
раметров уравнения системы с различным типом качественного по-
ведения его решений, дал практические рекомендации по настройке
регулятора Дж. Уатта (J. Watt).
Словацкий инженер А. Стодола (А. Stodola) сформулировал не-
обходимые условия устойчивости произвольного полинома и привлек
внимание немецкого математика А. Гурвица (А. Hurwitz) к проблеме
необходимых и достаточных условий устойчивости. Эта задача была
решена Гурвицем в 1895 г. с использованием результатов Ш. Эрмита
(Sh. Hermitte), но еще ранее, в 1877 г., эквивалентные условия устой-
чивости были найдены Е. Рауссом (E.J. Routh) [97].
Наиболее общие методы исследования устойчивости и основные по-
нятия современной теории устойчивости движения даны A.M. Ляпу-
новым в диссертации [56].
Частотные методы и структурные схемы стали широко приме-
няться в теории управления после работ Г. Найквиста (Н. Nyqwist)
[9б],Г.Блейка(Н. Black) [77], Г. Воде (Н. Bode) [78] и А.В. Михай-
лова [58]. Ученые провели исчерпывающее исследование устойчиво-
сти замкнутых обратной связью систем по частотным характеристи-
кам объекта и регулятора.
Основные постановки задач и базовые принципы теории автома-
тического регулирования имеют глубокие корни. Считается, что аме-
риканец М. Бултон (М. Boulton) в 1788 г. и француз Ж.-В. Понселе
(J.-V. Poncelet) в 1826 г. ввели в научный обиход принцип разомкну-
того регулирования. Авторство принципа обратной связи датиру-
ется 1788 г. и приписывается американцу Дж. Уатту. Интеграль-
ную компоненту в обратную связь ввел в 1837 г. француз Л. Молини
(L.
Molinie), производную — немцы, братья Уильям и Вернер Сименсы
(William
&
Werner Siemens) в 1844 г. Регулирование по нагрузке впер-
вые было предложено Ч. Портером (СТ. Porter) в 1908 г., релейная
обратная связь, по-видимому, впервые использовалась Ч. Шофилдом
(C.L. Schofield) еще в 1836 г., пропорциональное регулирование при-
менялось в 1870 г. американцем Д. Вудбери (D.A. Woodbury).
С современной трактовкой методов прямого управления можно
ознакомиться по работам [1, б, 11, 12, 64, 67]. Принцип двухканаль-
ности изложен в [61, 62, 67]. Метод Кулебакина подробно описан
в [49, 52]. Теория и методы большого коэффициента усиления, по-
видимому, впервые систематически изложены в монографии [57].

Глава 2
Некоторые принципы построения
нелинейных регуляторов
Релейные системы являются простейшим видом принципиально нели-
нейных динамических систем, они описываются дифференциальными
уравнениями с разрывными характеристиками и потому часто их на-
зывают разрывными системами. В теории автоматического управле-
ния интерес к исследованию разрывных систем связан с использова-
нием сервомеханизмов типа полный вперед-полный назад, а также
ввиду наличия амплитудных ограничений на сигналы.
В этой главе мы рассматриваем некоторые специальные вопросы
теории релейных систем, представляющие интерес в общем контексте
монографии и прежде всего в связи с ангшизом возможностей релейной
стабилизации в условиях неопределенности.
2.1.
Релейная обратная связь
2.1.1.
Основные понятия
Релейная система — это система, в структурной схеме которой име-
ется хотя бы один релейный элемент (РЭ). В теории автоматического
управления релейной считают, как правило, обратную связь, изобра-
женную на рис. 2.1, на котором sgn (•) — нелинейная операция, устана-
Т^
R
у
а
\'
Р
sgn
и
Рис. 2.1
вливающая связь между управлением и и выходом а регулятора R по
формуле и — sgn
(X.
Если релейных элементов несколько, то систему
называют каскадной релейной системой.
Характернсш особенность РЭ — разрывность, что вносит суще-
ственную специфику в методы анализа и синтеза релейных систем, а
2.1.
Релейная обратная связь
69
также накладывает отпечаток на их качественное поведение и функ-
циональные возможности. Типичные модели релейного элемента изо-
бражены на рис. 2.2.
1
0
и
а
-1
1
•
-Д,
0
-1
А
а
-д
Т
Г
Д о-
-1
Идеальный РЭ
РЭ с гистере-
зисом 2Д
РЭ с мертвой
зоной 2Д
Рис.
2.2
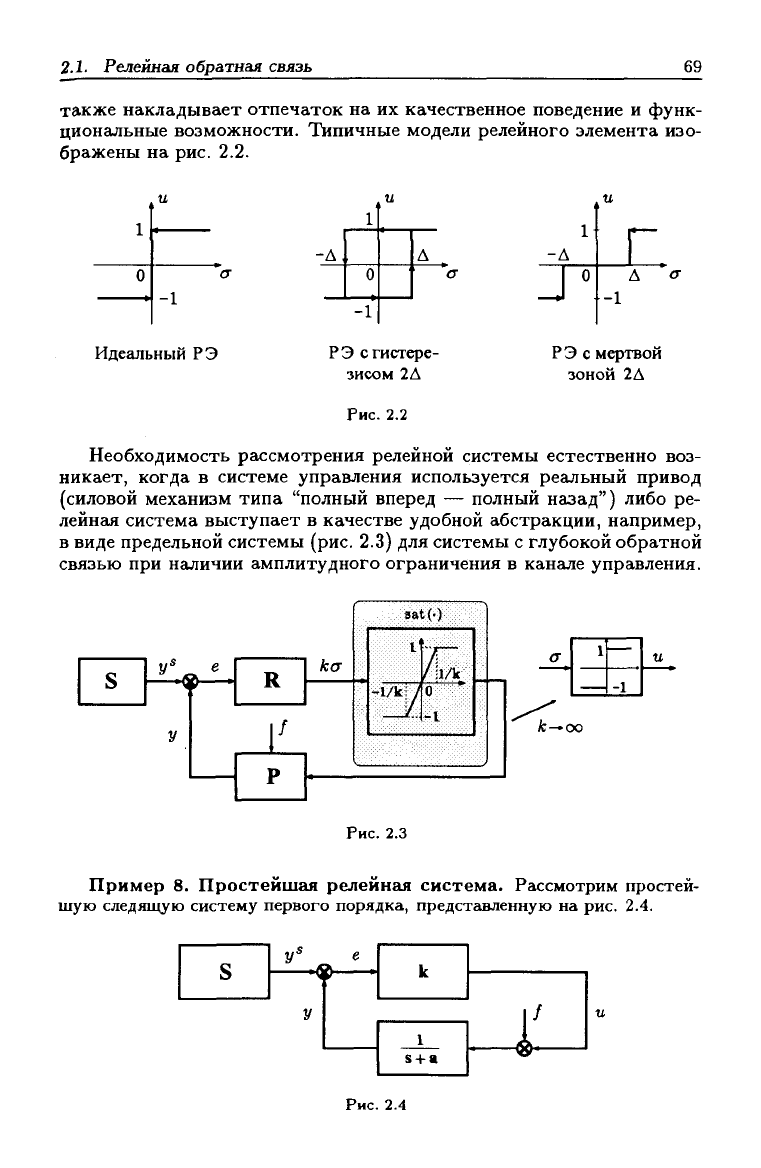
Необходимость рассмотрения релейной системы естественно воз-
никает, когда в системе управления используется реальный привод
(силовой механизм типа "полный вперед — полный назад") либо ре-
лейная система выступает в качестве удобной абстракции, например,
в виде предельной системы (рис. 2.3) для системы с глубокой обратной
связью при наличии амплитудного ограничения в кангше управления.
е
i/
R
1'
Р
к<7
sat(.)
1
-1/к: /
/:i/k
0
[
1
-1
и
к — оо
Рис.
2.3
Пример 8. Простейшая релейная система. Рассмотрим простей-
шую следящую систему первого порядка, представленную на рис. 2.4.
S
у'
"V
У
е
7)
•
9
'
Рис
к
1
s + a
2.4
i:
• 4S>'
70 Глава
2.
Некоторые принципы построения нелинейных регуляторов
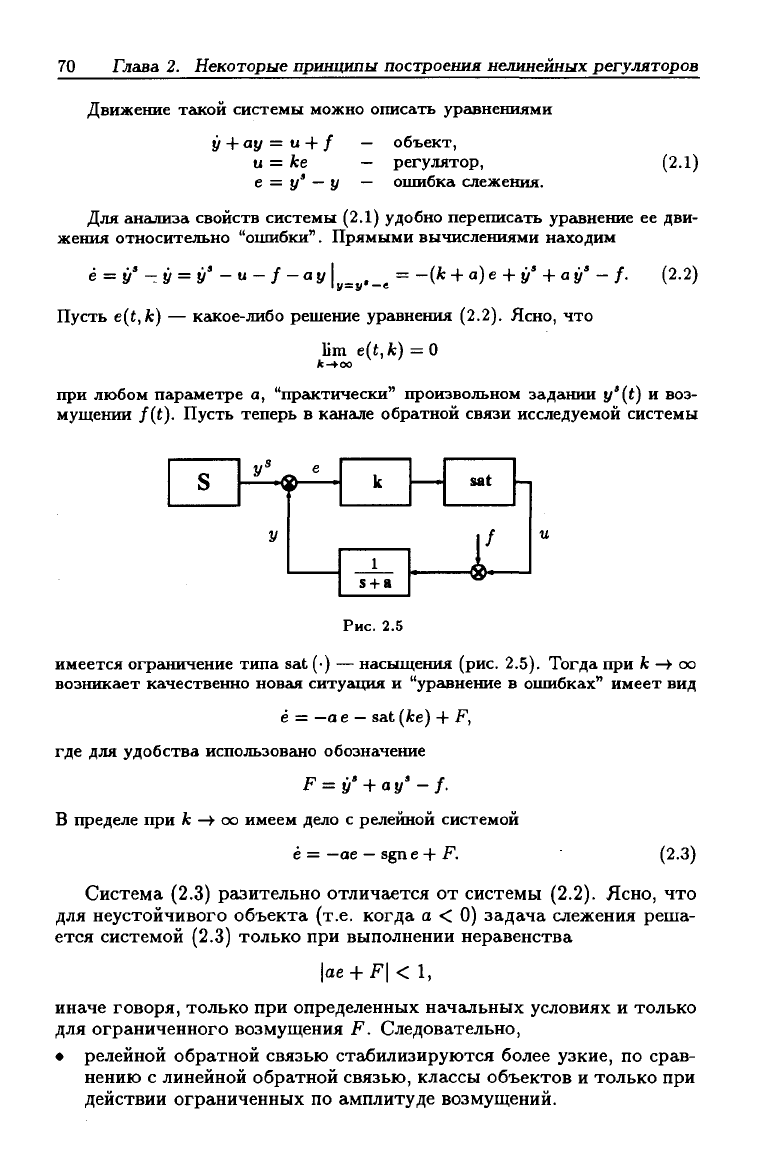
Движение тахой системы можно описать уравнениями
у
+ ау = и + f —
объект,
и
= ке —
регулятор,
е
= у'
—
у —
оишбка слежения.
(2.1)
Для анализа свойств системы (2.1) удобно переписать уравнение
ее
дви-
жения относительно "ошибки". Прямыми вычислениями находим
e
= y'-y =
y'-ti-f-ay\.
=-{k + a)e + y' + ay'-f. (2.2)
Пусть e(t, jfc)
—
какое-либо решение уравнения (2.2). Ясно,
что
Бт e{t,k)
=0
при любом параметре
а,
"практически" произвольном задании
y'{t) и
воз-
мущении
f{t).
Пусть теперь
в
кгмале обратной связи исследуемой системы
S
2/*
У
е
i
•
к
-
1
s + a
—•
sat —1
Г
Рис.
2.5
имеется ограничение типа sat (•) — насыщения (рис. 2.5). Тогда при
А;
—^
оо
возникает качественно новая ситуащш
и
"ургшнение
в
ошибках" имеет вид
ё
=
—а е —
sat (ке)
+ F,
где для удобства использовано обозначение
F =
y'
+
ay'-f.
В пределе
при к
-> оо имеем дело
с
релейной системой
ё =-ae-sgne-t-F.
(2.3)
Система
(2.3)
разительно отличается
от
системы (2.2). Ясно,
что
для неустойчивого объекта (т.е. когда
а < 0)
задача слежения реша-
ется системой
(2.3)
только
при
выполнении неравенства
\ae
+ F\< 1,
иначе говоря, только
при
определенных начальных условиях
и
только
для ограниченного возмущения
F.
Следовательно,
• релейной обратной связью стабилизируются более узкие,
по
срав-
нению
с
линейной обратной связью, классы объектов
и
только при
действии ограниченных
по
амплитуде возмущений.