Емельянов С.В. Новые типы обратной связи
Подождите немного. Документ загружается.

1.3.
Принцип
регулирования по
возмущению
31
ходимое услс!Ьие работоспособности системы регулирования по нагрузке.
Действительно, программное управление и' = Р у' имеет вид
и' = у' +ajv' +aiy,
и после подстановки его в уравнение объекта (1.6) получг1ем уравнение
у
+
а2У
+ aiy = y' + ojy' +aiy.
Запишем это уравнение относительно ошибки регулирования е = у'
—
у.
Получаем
ё + азё + aie =
О,
и видим, если e(t) -¥
О
при t -^ оо, то задача стабилизации решена. Но
последнее условие и означает асимптотическую устойчивость свободных
движений объекта.
Рассмотрим теперь случай, когда объект управления находится на гра-
нице устойчивости ai = О, aj > О, и программное управление реализуется
не точно, а с погрешностью е = const, т.е. и = и' + е = е, поскольку
и' = Р~^у' = 0. В этом случае выход объекта удовлетворяет дифференци-
альному уравнению у -f- iiy = е, частное решение которого, обусловленное
наличием правой части е, неограниченно по времени нарастает по модулю,
"уводя" выход объекта от желаемого нуля. Заметим, что этот вывод имеет
место и
в
том случае, когда программное управление реализуется точно, но
на входе нейтрального объекта действует постоянная помеха.
Таким образом,
• принцип регулирования по нагрузке имеет ограниченное примене-
ние при синтезе систем управления и может быть применен, во-
обще говоря, лишь в сочетании с другими принципами регулиро-
вания.
В частности, в комбинации с принципом регулирования по возму-
щению, к рассмотрению которого мы теперь и перейдем.
1.3. Принцип регулирования по возмущению
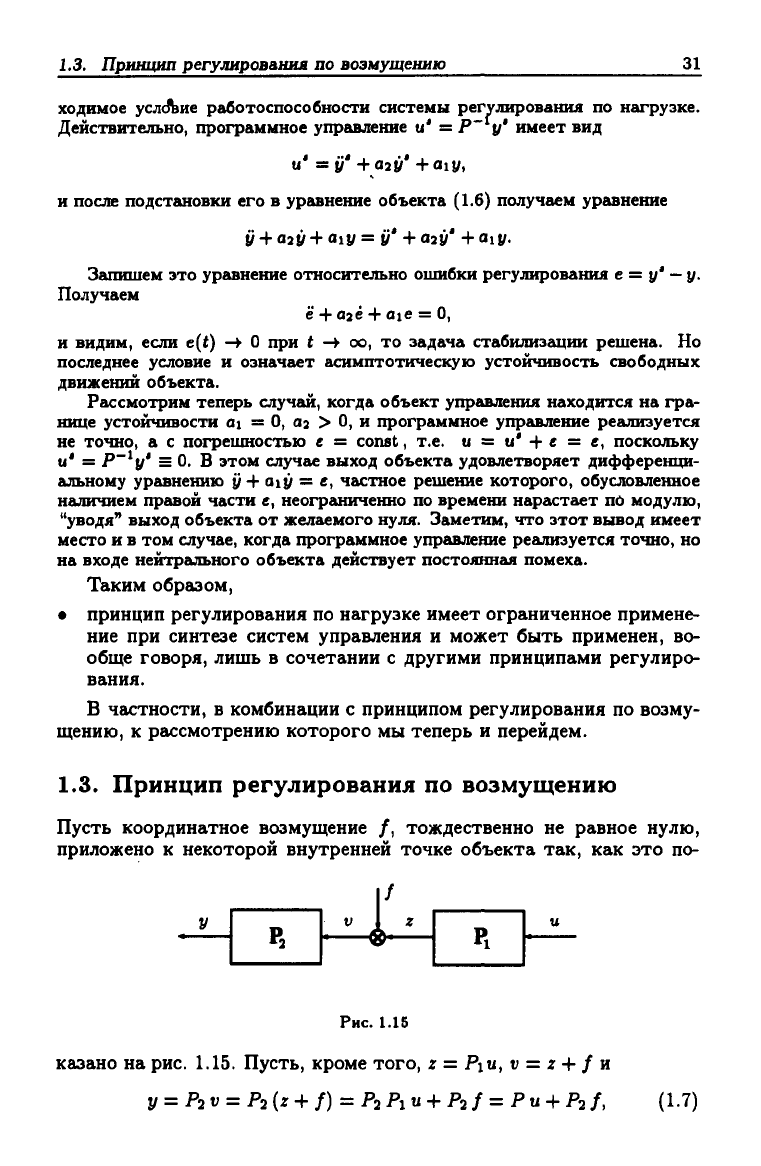
Пусть координатное возмущение /, тождественно не равное нулю,
приложено к некоторой внутренней точке объекта так, как это по-
Рис. 1.15
казано на рис. 1.15. Пусть, кроме того, z = Piu, v = г + f п
у = PiV = P2(z + f) = P2P1U + Pi f = Р и +
Р2
f, (1.7)
32
Глава 1. Принципы построения линейных
систем
где учтено, что Рг Pi = Р- Здесь мы имеем новую ситуацию, по-
скольку выход объекта зависит теперь не только от входа «, но и от
возмущения /. Действительно, даже если мы точно следуем прин-
ципу регулирования по нагрузке и применяем соответствующее ему
программное управление
то в результате получим систему управления, выход которой опреде-
ляется соотношением
y=^PP-'y' + P2f = y' + P2f
и, как видно, явно зависит от возмущения /, если Рг/ ^ 0. В том
случае, когда возмущение / можно измерить, для устранения указан-
ной зависимости целесообразно применить принцип регулирования по
возмущению.
В соответствии с этим принципом управление должно содержать
компоненту, пропорциональную возмущению. Применительно к дан-
ному случаю это означает, что управление следует взять в виде суммы
двух компонент: программной и компенсирующей, т.е.
и = и' +'Df,
где V — искомый оператор. После подстановки этого выражения в
(1.7) получим соотношение
y = P{u'+Vf) + P2f = y' + (Pt> + Рз) /,
из анализа которого видно, что задача стабилизации решается точно и
выход объекта не зависит от возмущения /, если выполнено равенство
PV + P2 = 0,
называемое условием компенсации.
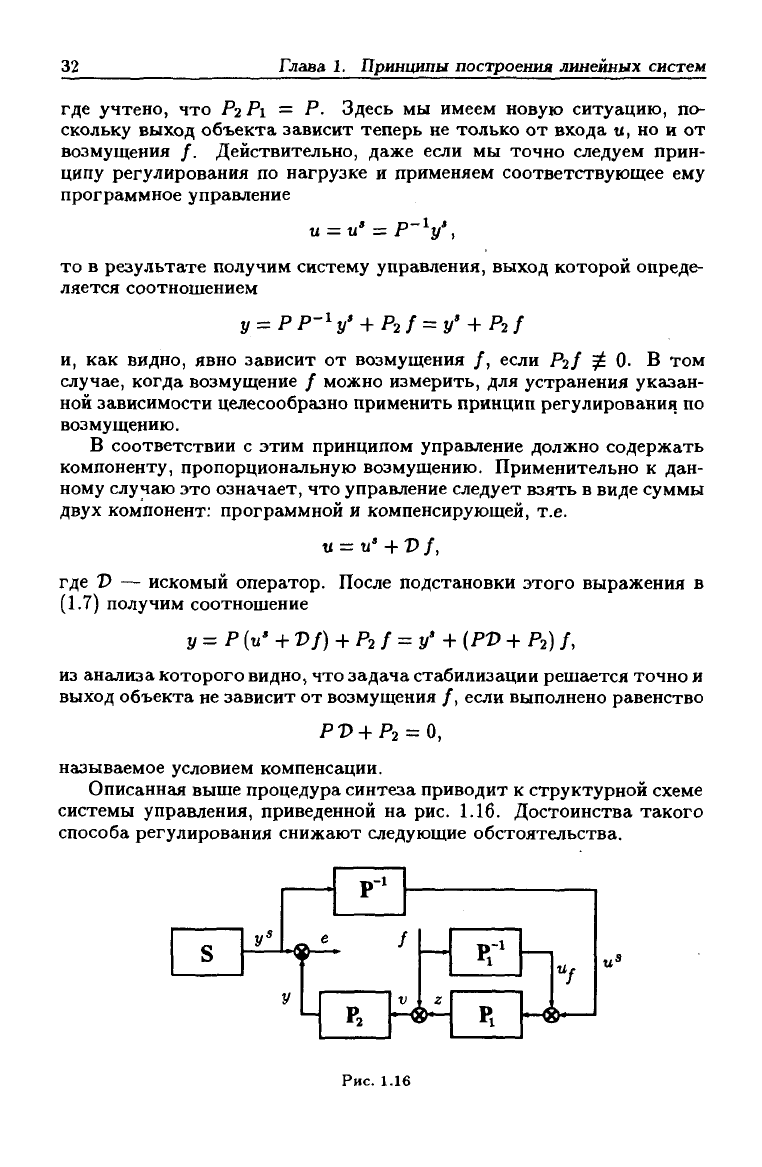
Описанная выше процедура синтеза приводит к структурной схеме
системы управления, приведенной на рис. 1.16. Достоинства такого
способа регулирования снижают следующие обстоятельства.
S
у'
•ч
у
р-1
г
Г^
'
р^
Рис.
1
V
•-<
Z
.16
г
Pi
-<
1.3. Регулировяние по возмущению 33
Во-первых, как и ранее, неустойчивые объекты не могут быть за-
стабилизированы таким образом.
Во-вторых, в нетривиальных случаях (т.е. когда Рх ф const) опе-
ратор Р, удовлетворяющий условию компенсации, физически неосу-
ществим. Действительно, из условия компенсации имеем равенство
V = -Р-1 Рз = -(Pi Рг)-^ = -Р:^,
а так как оператор Pi моделирует реальный процесс, то обратный
ему оператор Pj"^ физически неосуществим.
В-третьих, условие компенсации дается равенством, и при малей-
шей погрешности Е в правой части соответствующего операторного
равенства
PV-^Pi-E
зависимость выхода объекта от возмущения не устраняется, так как
в этом случае имеем
y=j/'-KPP+P2)/ = I/'+J5;/,
и если Ej ^ О, то второе слагаемое в этом равенстве может привести
к неприемлемому отклонению выхода у от задания г/'. Существен-
ным ограничением этого принципа является также предположение о
возможности прямого измерения возмущения /, что на практике вы-
полняется редко.
Пример 2. Прямая компенсация возмущения. Проиллюстрируем
возможности и ограничения принципа компенсации по возмущению на объ-
екте из Примера 1. Положим, что в композиции операторов на рис. 1.15
P = PiPu
а передаточные фушащи, соответствующие операторам Р\ и Рг, даются
выражениями
« -t- Ai
•»
-t-
Аг
где,
естественно,
Ai+A2=a2, AiA2=ai.
В пространстве состояний этому операторному описанию объекта упрг1вле-
ния соответствует система дифференциальных уравнений
У
+ АгУ = г +/, iH-Ai« = u
или, что в данном случае удобнее, одно дифференциальное ургшнение вто-
рого порядка
y-t-a2y-(-aiy = u-|-/-|-Ai/. (1.8)
Тогда, следуя изложенному выше принципу регулирования по возмуще-
нию,
из условия компенссщии
Т>
= —РГ' находим передаточную функцию
W-o{a)
оператора V в виде
VVp(5) = -(e-(-A,),
что (в сочетании с регулированием по нагрузке для получения программной
34
Глава I. Пршщипы построения линейных систем
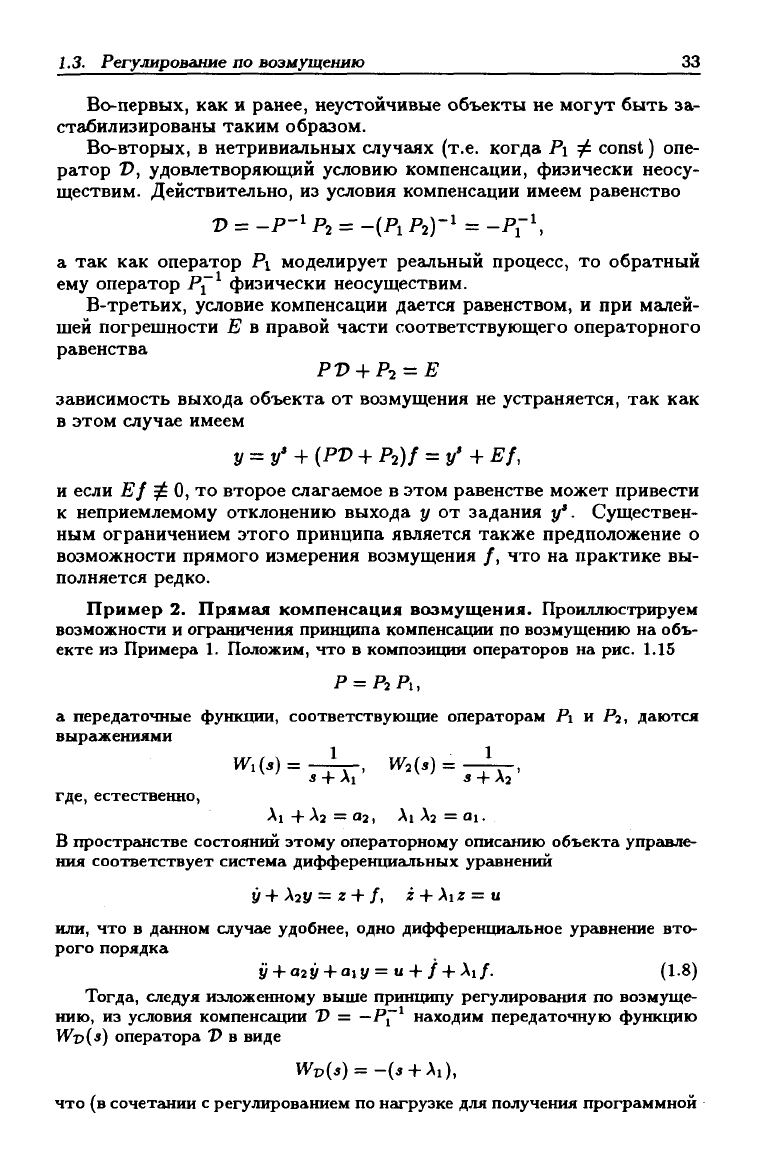
части и' фушщии упргшления) приводит к структуре системы управления,
изображенной на рис. 1.17. Из этой структурной схемы и дифференциаль-
s''+a,s+a,
-9-
s + Xj
Wp(s)
s + Xi
"/
-*-J
Рис. 1.17
ного ургшнения (1.8) можно получить соответствующее решение в терминах
пространства состояний.
После подстановки в правую часть уравнения (1.8) компенсирующего
управления и = ~(/ + Ai/) движение системы описывается однородным
дифференциальным ургшнением
У
+ а^у + aiy = 0.
Из этого ургшнения, кгж и ргшее, следует, что асимптотическая устой-
чивость объекта — необходимое условие разрешимости задачи в рамках
принципа регулировгшия по нагрузке. Но и это ограничение метода далеко
не единственное, так как в регуляторе синтезированной системы управле-
ния используются физически неосуществимые операторы с передаточными
функциями
3^
+a23+ai и s-f-Ai. Более того, даже если на это закрыть глаза,
то все равно построенная система может оказаться неработоспособной, так
как она очень чувствительна к малейшему нарушению условия компенсации:
u = -(/-f-Ax/).
Допустим, что в реализации передаточной функции оператора V
допущена погрешность и вместо W^is) использована передаточная
функция
W:,{s)
= -{s + Xi + AX),
где ДА — некоторая константа. Тогда ошибка в реализации условия
компенсации описывается выражением
Е=-
ДА
«2 + a2S + ai
и может быть сколь угодно малой при малой погрешности ДА. По-
скольку ошибка регулирования в данном случг1е определяется выра-
жением
е = у' -у= -у-т т—/>
1.4- Компенсация при косвенном измерении возмущения
35
ТО вновь, как и в Примере 1, убеждаемся, что при ai = О, ог >
О
даже
сколь угодно малое постоянное возмущение / может привести к сколь
угодно большому отклонению выхода у от задания у'.
Таким образом,
• возможна лишь приближенная реализация принципа прямой ком-
пенсации. При этом, пожалуй, наиболее существенным его ограни-
чением является необходимость прямого измерения возмущения.
Попытка смягчения этого ограничения предпринята в принципе
компенсации с косвенным измерением возмущения. Перейдем к рас-
смотрению этого принципа регулирования.
1.4. Принцип компенсации
при косвенном измерении возмуидения
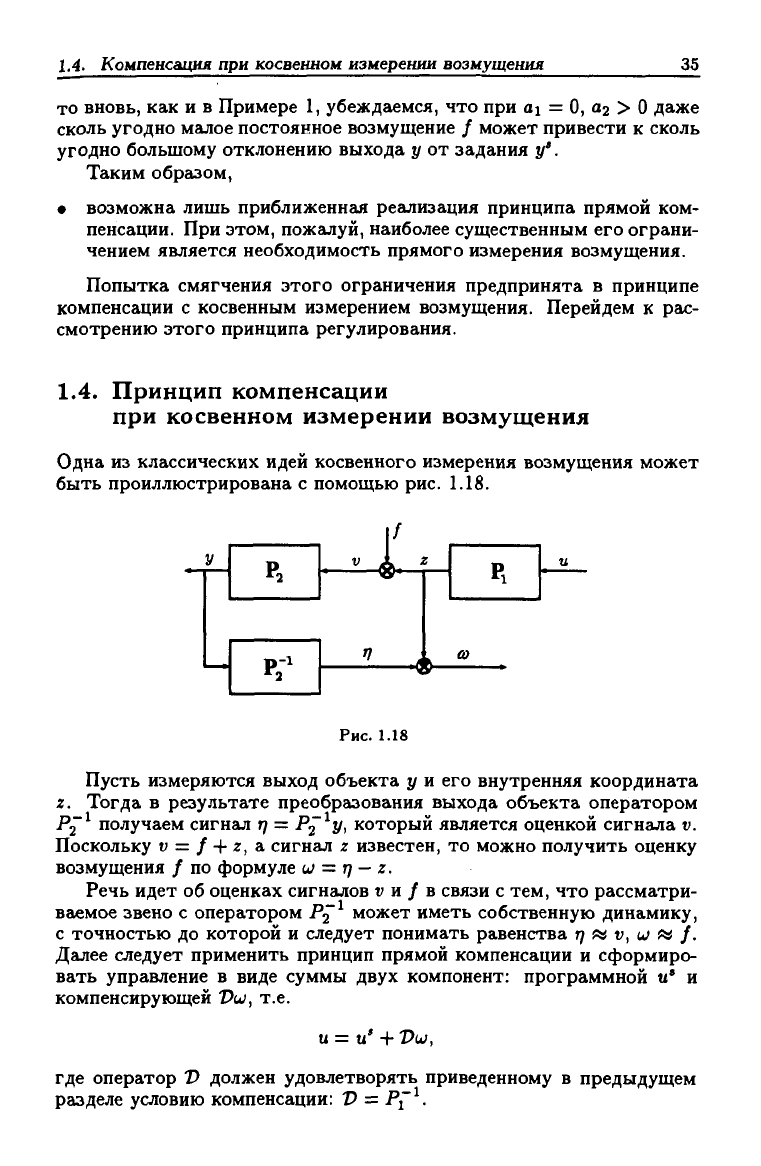
Одна из классических идей косвенного измерения возмущения может
быть проиллюстрирована с помощью рис. 1.18.
^ Р,
•^
Pi
т
Рис. 1.18
Пусть измеряются выход объекта у и его внутренняя координата
Z. Тогда в результате преобразования выхода объекта оператором
Pj"^
получаем сигнал
TJ
= Р^^у, который является оценкой сигнала v.
Поскольку V = f + Z,
а.
сигнал z известен, то можно получить оценку
возмущения / по формуле и =
т) —
z.
Речь идет об оценках сигналов г и / в связи с тем, что рассматри-
ваемое звено с оператором Р^^ может иметь собственную динамику,
с точностью до которой и следует понимать равенства
г}
fa v, w fa f.
Далее следует применить принцип прямой компенсации и сформиро-
вать управление в виде суммы двух компонент: программной и* и
компенсирующей Pw, т.е.
и = и' +
Т>и,
где оператор V должен удовлетворять приведенному в предыдущем
разделе условию компенсации: V = Pf^.
36
Глава i. Принципы построения линейных систем
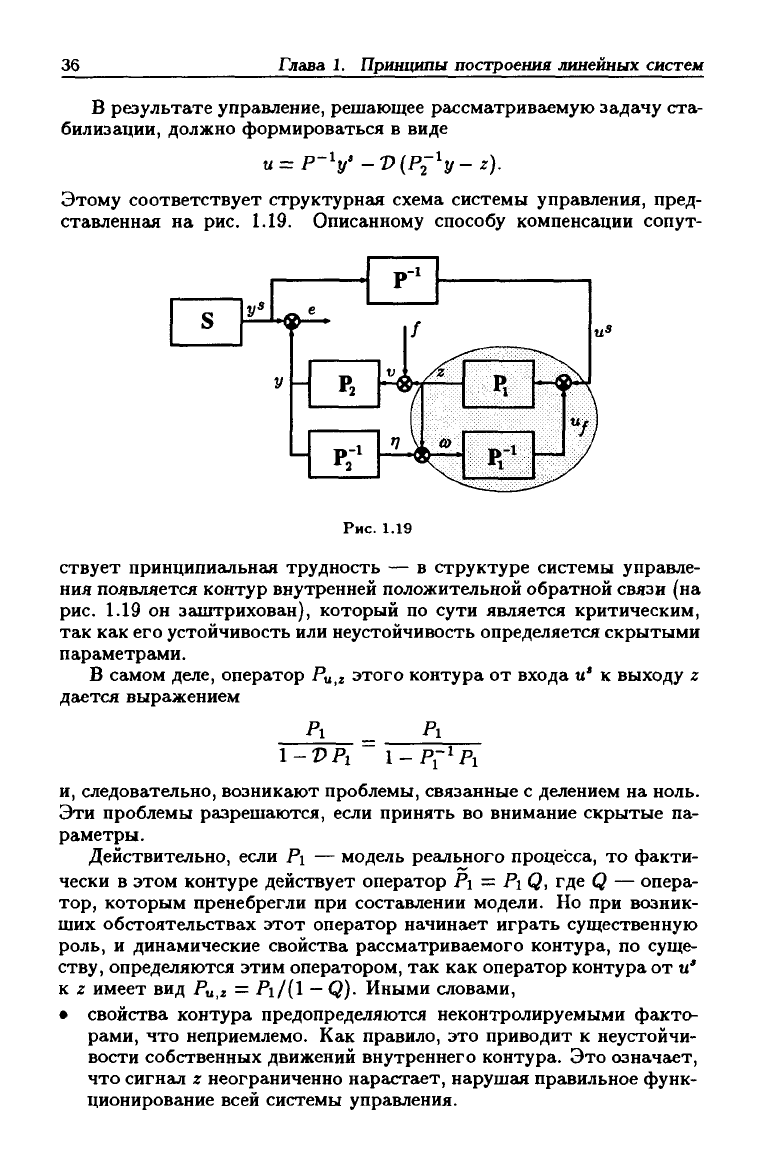
В результате управление, решающее рассматриваемую задачу ста-
билизации, должно формироваться в виде
u =
p-'y'-V(Pi'y-z).
Этому соответствует структурная схема системы управления, пред-
ставленная на рис. 1.19. Описанному способу компенсации сопут-
Т^
Р2
Р "^
*2
Р'
i^L
/
—(^
7 \
CD
Р;
Рг"
"/
Рис. 1.19
ствует принципиальная трудность — в структуре системы управле-
ния появляется контур внутренней положительной обратной связи (на
рис.
1.19 он згшггрихован), который по сути является критическим,
так как его устойчивость или неустойчивость определяется скрытыми
параметрами.
В самом деле, оператор Рц.г этого контура от входа w' к выходу z
дается выражением
Pi Pi
l-VPi l-p-^Pi
и, следовательно, возникают проблемы, связанные с делением на ноль.
Эти проблемы разрешаются, если принять во внимание скрытые па-
раметры.
Действительно, если Pi — модель реального процесса, то факти-
чески в этом контуре действует оператор Pi = PiQ, где Q — опера-
тор,
которым пренебрегли при составлении модели. Но при возник-
ших обстоятельствах этот оператор начинает играть существенную
роль,
и динамические свойства рассматриваемого контура, по суще-
ству, определяются этим оператором, так как оператор контура от и'
к Z имеет вид Pu.z = Pi/(^
—
Q)- Иными словами,
• свойства контура предопределяются неконтролируемыми факто-
рами, что неприемлемо. Как правило, это приводит к неустойчи-
вости собственных движений внутреннего контура. Это означает,
что сигнал Z неограниченно нарастает, нарушая правильное функ-
ционирование всей системы управления.
1.4. Компенсация при косвенном измерении возмущения
37
В следующем примере подробно разбираются некоторые особенно-
сти описанного явления. Здесь же подчеркнем, что указанная труд-
ность не единственнг1Я. Все проблемы, связанные с использованием
принципа прямой компенсации и отмечавшиеся в предыдущих разде-
лах, разумеется, наследуются и рассмотренными в этом разделе си-
стемами компенсации с косвенным измерением возмущения.
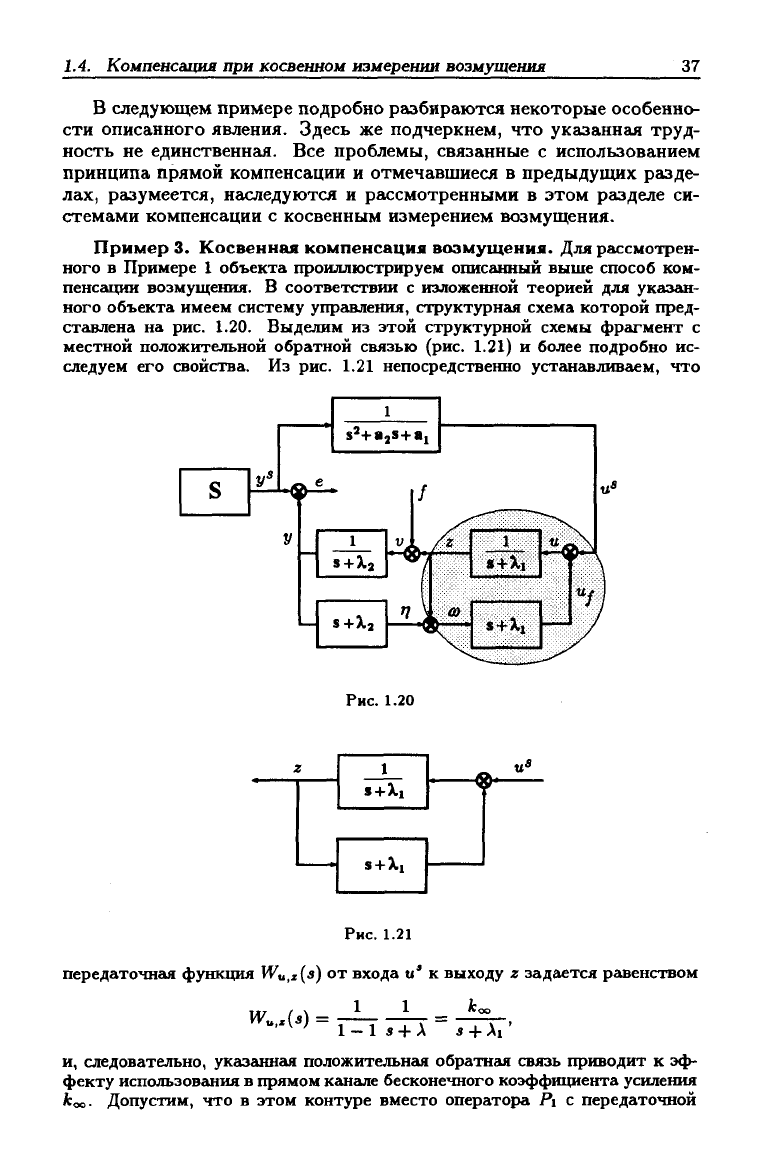
Пример 3. Косвенная компенсация возмущения. Для рассмотрен-
ного в Примере 1 объекта проиллюстрируем описанный выше способ ком-
пенсгщии возмущения. В соответствии с изложенной теорией для указгш-
ного объекта имеем систему управления, структурнсш схема которой пред-
ставлена на рис. 1.20. Выделим из этой структурной схемы фрагмент с
местной положительной обратной связью (рис. 1.21) и более подробно ис-
следуем его свойства. Из рис. 1.21 непосредственно устангшливаем, что
Рис.
1.20
s+Xi
s + Xi
-9-
Рис.
1.21
передаточная функция Wu,z{3) от входа и' к выходу z задается равенством
1 1 Лоо
W^,4s)
=
1-1а-|-А
3 + Xi'
и, следовательно, укаэаннгъя положительнгш обратная связь приводит к эф-
фекту использования в прямом канале бесконечного коэффициента усиления
fcoo. Допустим, что в этом контуре вместо оператор» Pi с передаточной
38
Глава 1. Принципы
построения
линейных
систем
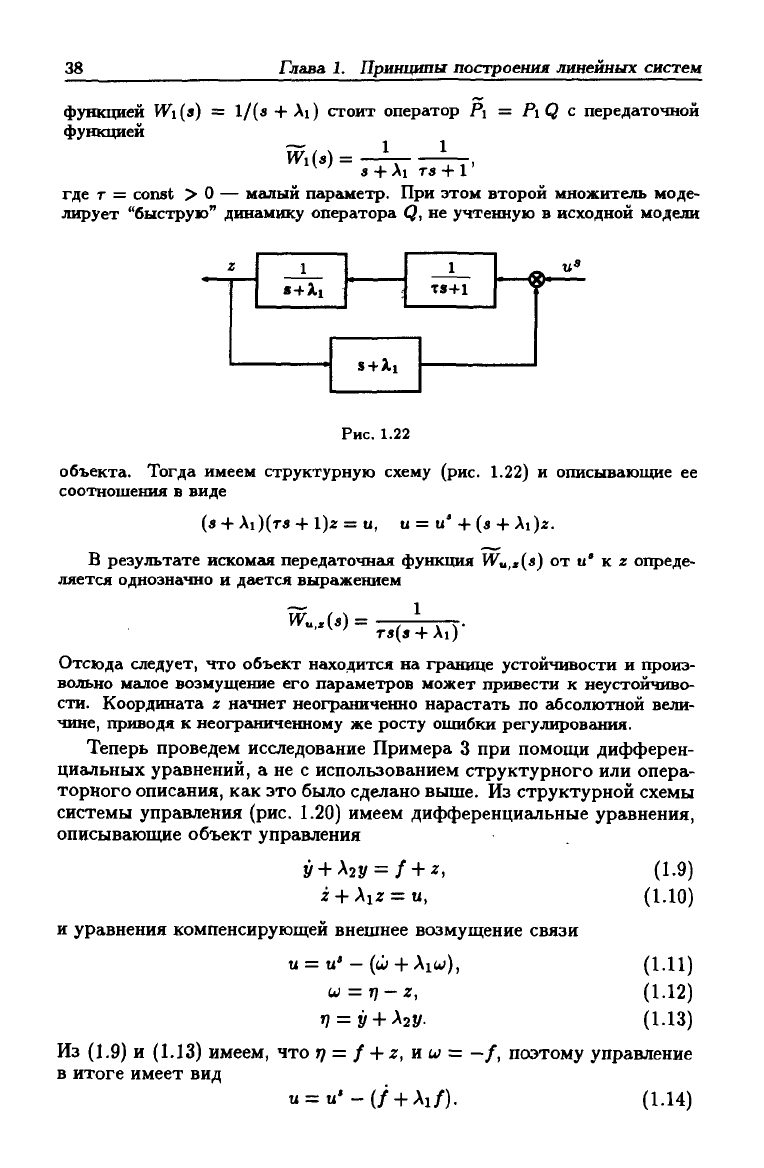
фующией Wi(s) = 1/(а + Ai) стоит оператор Pi = PiQ с передаточной
функцией
где т = const >
О
— малый паргинетр. При этом второй множитель моде-
лирует "быструю" динамику оператора Q, не учтенную в исходной модели
* + Xi
TS+1
«-
s + Xi
Рис. 1.22
объекта. Тогда имеем структурную схему (рис. 1.22) и описывающие ее
соотношения в виде
(s +
\I){TS
+ l)z = и, и = и' + (3 + Xi)z.
В результате искомая передаточная фушщия Wu,i{s) от и' к г опреде-
ляется однозначно и дается выражением
И^и,х(в) =
1
т«(з +Ai)'
Отсюда следует, что объект находится на границе устойчивости и произ-
вольно малое возмущение его параметров может привести к неустойчиво-
сти.
Координата z начнет неогргшиченно нарастать по г1бсолютной вели-
чине, приводя к неограниченному же росту ощибки регулирования.
Теперь проведем исследование Примера 3 при помощи дифферен-
циальных уравнений, а не с использованием структурного или опера-
торного описания, как это было сделано выше. Из структурной схемы
системы управления (рис, 1.20) имеем дифференциальные уравнения,
описывающие объект управления
Z
+ Ajz = и,
(1.9)
(1.10)
и уравнения компенсирующей внешнее возмущение связи
и = и'-{ш + \1и), (1.11)
u = ri-z, (1.12)
Л
=
У
+ Х2у. (1.13)
Из (1.9) и (1.13) имеем, что
rj
= f + г,и и = -/, поэтому управление
в итоге имеет вид
u = u'-(/-HAi/). (1.14)
1.4. Компенсация при косвенном измерении возмущения 39
Если К (1.9) применить дифференциальный оператор d/dt + Ai, то с
учетом уравнения (1.10) получг1ем уравнение объекта в виде
y+a2y + aiy = u + f + Ai/,
где,
как и ранее, параметры
02 = Ai + Аг, ai = Ai Аз.
После подстановки в это уравнение управления из (114) получаем,
что движение системы управления описывается уравнением
у +
а2У
+ aiy = и' -{f + Ai/) + (/ + Ai/) = и'
и не зависит от возмущения. Поскольку (рис. 1.20)
«' = у' + 022/' + oi/ и е = J/' - г/,
то уравнение движения в ошибках имеет вид
6 + 026 + 016 = 0, (115)
и если оно устойчиво, то задача стабилизации решена без прямого
измерения возмущения /.
Отметим, что если уравнение (112) подставить в уравнение (111),
а результат
U
= ы' + (i + Ai^:) -
(»?
+ AiTj)
подставить в уравнение
(1.10),
то получим
i
+
Ajz
=
и'
+
(i
+ Xiz) - (^ + AIT;)
или, после упрощений,
^ + Ai»; = u'. (1.16)
Значит, собственные движения координаты z при таком управлении
не определяются однозначно, т.е. имеет место сокргицение полюса и
нуля.
Положим теперь, что вместо оператора Pi в системе действует опе-
ратор Pi = Pi Q и оператору Q отвечает, как и ранее, передаточная
функция
W'^(s) = l/(rs+l).
Тогда, как это можно понять из рис. 1.20,1.21, вместо дифференциаль-
ных уравнений (1.9), (110) надлежит рассматривать уравнения вида
У
+ А2!/ = / + г, rz + (r+l)i + Aiz = u. (1.17)
Вновь повторяя преобразования, убеждаемся в справедливости урав-
нения (1.15), но вместо соотношения (116) теперь получаем уравнение
TZ + (г + l)i + Aiz = (i + Aiz) + ы' - (^ + Ai??),
40 Глава 1. Принципы построения линейных
систем
которое после приведения подобных принимает вид
гг + гг = и'
—
(г) + Ai»;).
Отсюда следует, что устойчивость свободных движений переменной
Z определяется корнями характеристического полинома
(p[s) = T^s^ + Ts,
который имеет нулевой корень и, следовательно, отражает погранич-
ную ситуацию:
• малого изменения параметров объекта достаточно для возникно-
вения неустойчивого корня, а вместе с ним и неограниченного на-
растания координаты Z.
Этот вывод полностью совпадает с результатом, полученным на
основе операторного анализа системы управления. Более тонкий под-
ход к косвенному измерению возмущения с последующей компенса-
цией его влияния на регулируемую координату используется в прин-
ципе двухканальности Петрова.
1.5. Принцип двухканальности
Принцип двухканальности является эвристическим приемом струк-
турного синтеза инвариантных систем автоматического управления
или таких систем, в которых регулируемая координата не зависит от
неконтролируемого, т.е. не измеряемого непосредственно, внешнего
возмущения. Как всякий эвристический прием, принцип двухканаль-
ности не приводит к однозначному решению и не сводится к какой-
либо единственной последовательности действий. Однако централь-
ная идея этого приема весьма прозрачна и может быть сформулиро-
вана следующим образом: для достижения независимости регулируе-
мой координаты системы управления от внешнего возмущения необ-
ходимо организовать, как минимум, еще один дополнительный канал
влияния этого возмущения на регулируемую координату и "настро-
ить"
его таким образом, чтобы в заданной точке системы управления
произошла взаимная компенсация компонент сигналов, обусловленных
действием возмущения.
К рассматриваемой задаче стабилизации этот принцип построения
системы управления с полной компенсацией возмущения можно приме-
нить,
например, при следующих обстоятельствах. Пусть компонента
Рг оператора объекта Р представлена в виде композиции двух опера-
торов Р^ и Pj'i т.е.
Р2 = Р^'Р^,
причем выходной сигнал z подсистемы с оператором Pj может быть
измерен и, кроме того, при необходимости к этому сигналу может
быть прибавлен какой-либо внешний сигнал д.