Емельянов С.В. Новые типы обратной связи
Подождите немного. Документ загружается.

1.1.
Постановка
задачи управления и
предварительные
сведения
21
вектора может быть использован любой другой вектор z, связанный
с ним невырожденным преобразованием М (deg М ф 0), т.е.
Z = Мх.
После такой замены получаем уравнения объекта в прежней форме,
но с другими параметрами (Ам =
МАМ~^,
Ьм = Mb, см =
сМ~^):
Z = Ам^ + Ьми,
У= CMZ.
При этом, разумеется, вход-выходное соответствие (в частности, пе-
редаточная функция) не изменяется. Действительно,
см {sE - АтГ^Ьм = cM-^SE - МАМ-^^МЬ =
= cM-'^M(sE - А)-^М-'^МЬ = c{sE - А)-Ч.
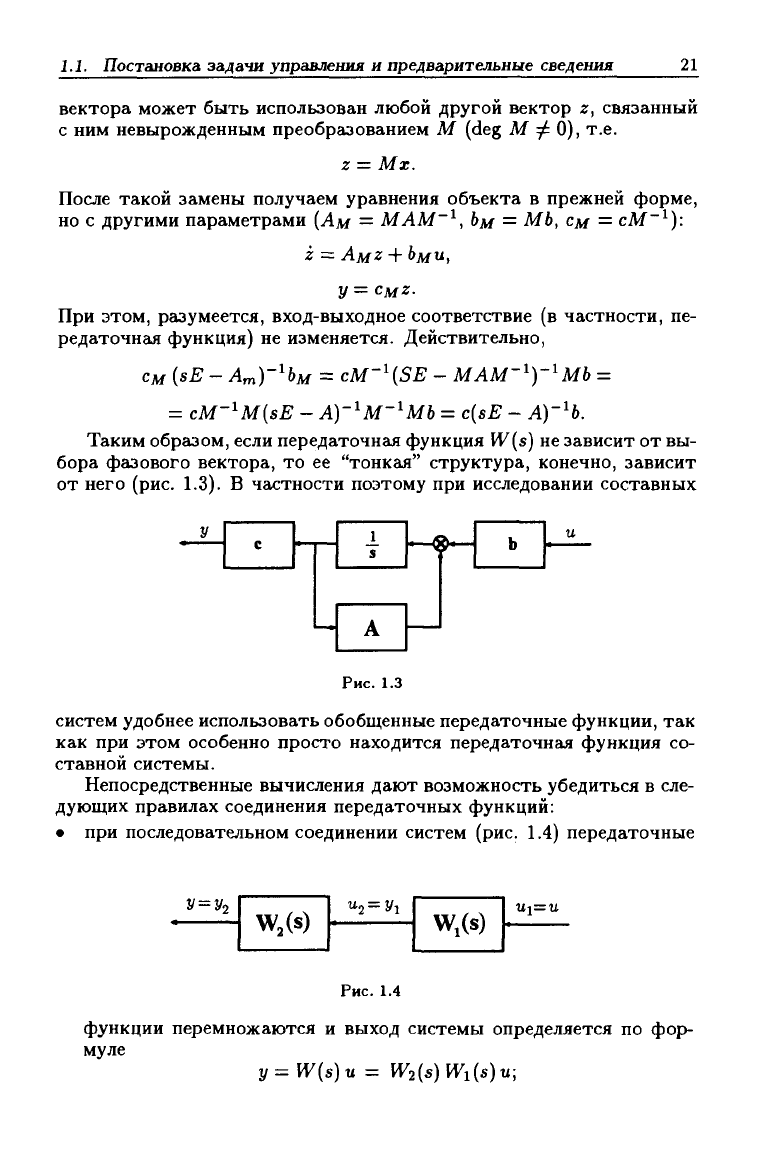
Таким обрг13ом, если передаточнгш функция W{s) не зависит от вы-
бора фазового вектора, то ее "тонкая" структура, конечно, зависит
от него (рис. 1.3). В частности поэтому при исследовании составных
У
с
1
S
А
Рис. 1.3
систем удобнее использовать обобщенные передаточные функции, так
как при этом особенно просто находится передаточная функция со-
ставной системы.
Непосредственные вычисления дают возможность убедиться в сле-
дующих правилах соединения передаточных функций:
• при последовательном соединении систем (рис. 1.4) передаточные
У = У2
W,(s)
«2 = 2/1
W,(s)
Ui=U
Рис. 1.4
функции перемножаются и выход системы определяется по фор-
муле
y = W{s)u = W2(s)Wi{s)u;
22
Глава 1. Принципы
построения
линейных
систем
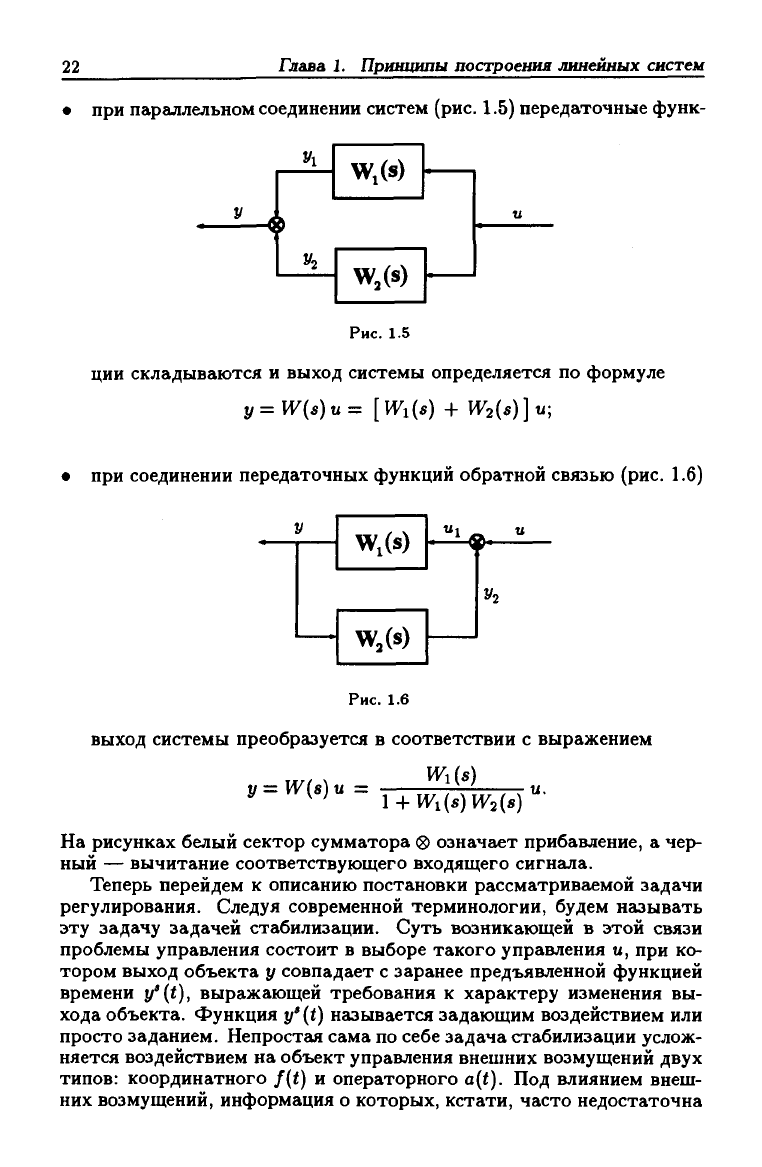
• при параллельном соединении систем (рис. 1.5) передаточные функ-
W,(s)
-9
W,(s)
Рис. 1.5
ции складываются и выход системы определяется по формуле
y=W(s)u= [Wi{s) -^ W2{s)]u-
при соединении передаточных функций обратной связью (рис. 1.6)
Wi(s)
-!iL®_JL
W,(s)
Рис. 1.6
выход системы преобразуется в соответствии с выражением
у = W{8) и =
l + Wi{s)W2(s)
На рисунках белый сектор сумматора
(gi
означает прибавление, а чер-
ный — вычитание соответствующего входящего сигнала.
Теперь перейдем к описанию постановки рассматриваемой задачи
регулирования. Следуя современной терминологии, будем называть
эту задачу задачей стабилизации. Суть возникающей в этой связи
проблемы управления состоит в выборе такого управления и, при ко-
тором выход объекта у совпадает с заранее предъявленной функцией
времени
y'(t),
выражающей требования к характеру изменения вы-
хода объекта. Функция у'
(<)
называется задающим воздействием или
просто заданием. Непростая сама по себе задача стабилизации услож-
няется воздействием на объект управления внешних возмущений двух
типов: координатного /(<) и операторного a{t). Под влиянием внеш-
них возмущений, информация о которых, кстати, часто недостаточна
I.I. Постановка задачи управления и предварительные сведения
23
(например, известен только факт их принадлежности некоторым мно-
жествам функций Т
1/1
А, т.е. f £ Т, а € Л), взаимосвязь между
входом и выходом объекта становится неоднозначной и неопределен-
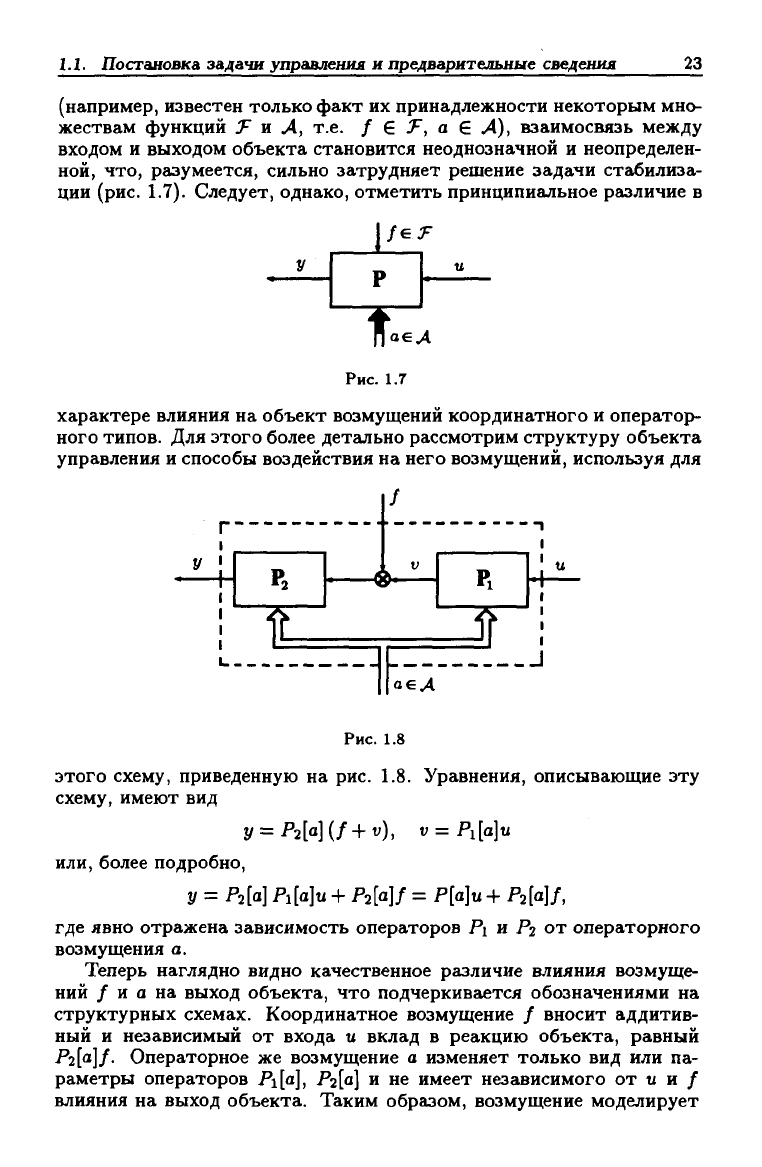
ной, что, разумеется, сильно затрудняет решение задачи стабилиза-
ции (рис. 1.7). Следует, однако, отметить принципиальное различие в
|£
e:F
У
р
Пае
л
U
Рис.
1.7
характере влияния на объект возмущений координатного и оператор-
ного типов. Для этого более детально рассмотрим структуру объекта
управления и способы воздействия на него возмущений, используя для
f.
-9-
аеЛ
Pi
3F
•
л
I
Рис.
1.8
этого схему, приведенную на рис. 1.8. Уравнения, описывающие эту
схему, имеют вид
y = P2[a](f+v), v = Pi[a]u
или, более подробно,
У =
Р7[а]
Pi[a]u + P2[a]f = Р[а]и + Pj W/,
где явно отражена зависимость операторов Pi и Рг от операторного
возмущения а.
Теперь наглядно видно качественное различие влияния возмуще-
ний / и а на выход объекта, что подчеркивается обозначениями на
структурных схемах. Координатное возмущение / вносит аддитив-
ный и независимый от входа и вклад в реакцию объекта, равный
А
[о]/-
Операторное же возмущение а изменяет только вид или па-
раметры операторов Pi
[а],
Р2[а] и не имеет независимого от и и /
влияния на выход объекта. Таким образом, возмущение моделирует
24
Глсша
1. Принципы построения линейных
систем
линейное воздействие внешней среды на регулируемую координату,
а возмущение а — "нелинейное" ее воздействие.
В линейной теории автоматического управления влияние операторн
ного возмущения на процесс управления не изучается, поэтому ниже
полагается а =
О
и на структурных схемах это возмущение не обозна-
чается.
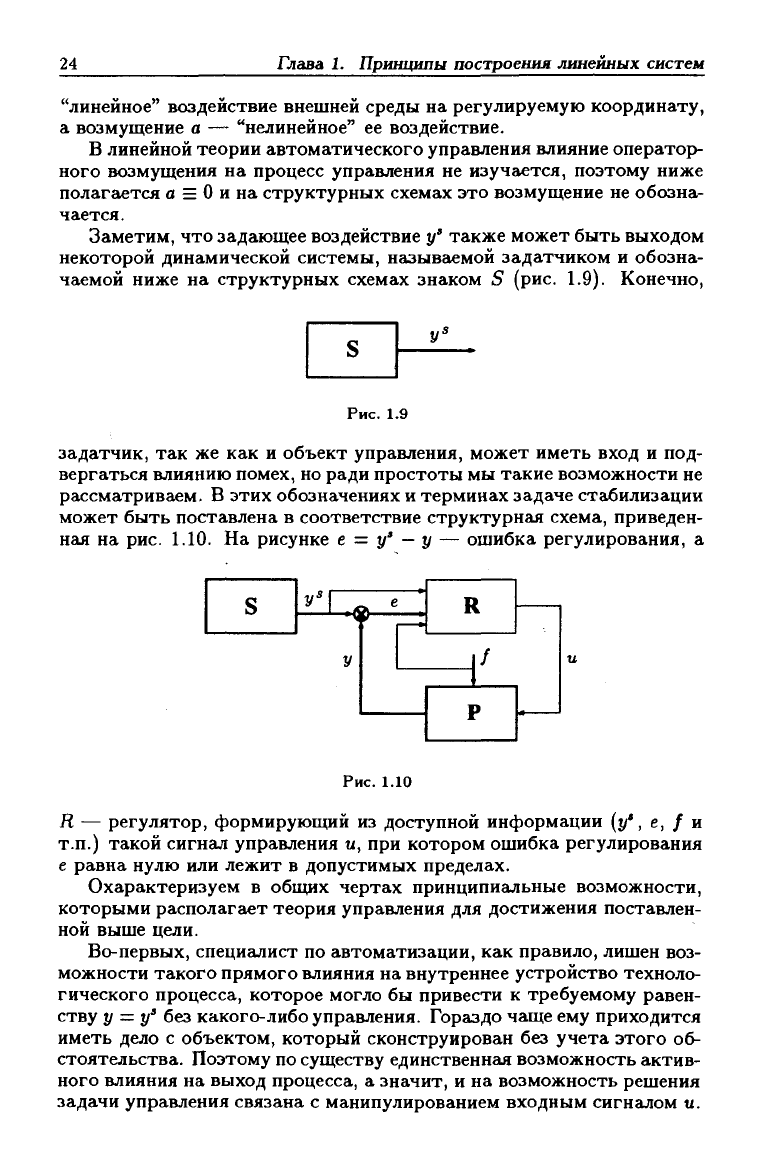
Заметим, что задающее воздействие у' также может быть выходом
некоторой динамической системы, называемой задатчиком и обозна-
чаемой ниже на структурных схемах знаком 5 (рис. 1.9). Конечно,
Рис. 1.9
задатчик, так же как и объект управления, может иметь вход и под-
вергаться влиянию помех, но ради простоты мы такие возможности не
рассматриваем. В этих обозначениях и терминах задаче стабилизации
может быть поставлена в соответствие структурная схема, приведен-
ная на рис. 1.10. На рисунке е = у'
—
у — ошибка регулирования, а
S
11*
"V
у
i
R
|/
1
Р
Рис. 1.10
Д — регулятор, формирующий из доступной информации (у', е, / и
т.п.) такой сигнал управления «, при котором ошибка регулирования
е равна нулю или лежит в допустимых пределах.
Охарактеризуем в общих чертах принципигшьные возможности,
которыми располагает теория управления для достижения поставлен-
ной выше цели.
Во-первых, специалист по автоматизации, как правило, лишен воз-
можности такого прямого влияния на внутреннее устройство техноло-
гического процесса, которое могло бы привести к требуемому равен-
ству у = у' без какого-либо управления. Гораздо чаще ему приходится
иметь дело с объектом, который сконструирован без учета этого об-
стоятельства. Поэтому по существу единственная возможность актив-
ного влияния на выход процесса, а значит, и на возможность решения
задачи управления связана с манипулированием входным сигналом и.
1.1.
Постановка
задачи управления и предварительные сведения
25
И здесь, по сути дела, сразу обнаруживаются только две "чистые"
стратегии поведения: первая связана с надлежащим формированием
входного сигнала из имеющихся сигналов таким образом, чтобы его
последующее преобразование оператором объекта привело бы к тре-
буемому результату у = у"; вторая — с изменением оператора вход-
выходного соответствия с помощью обратной связи.
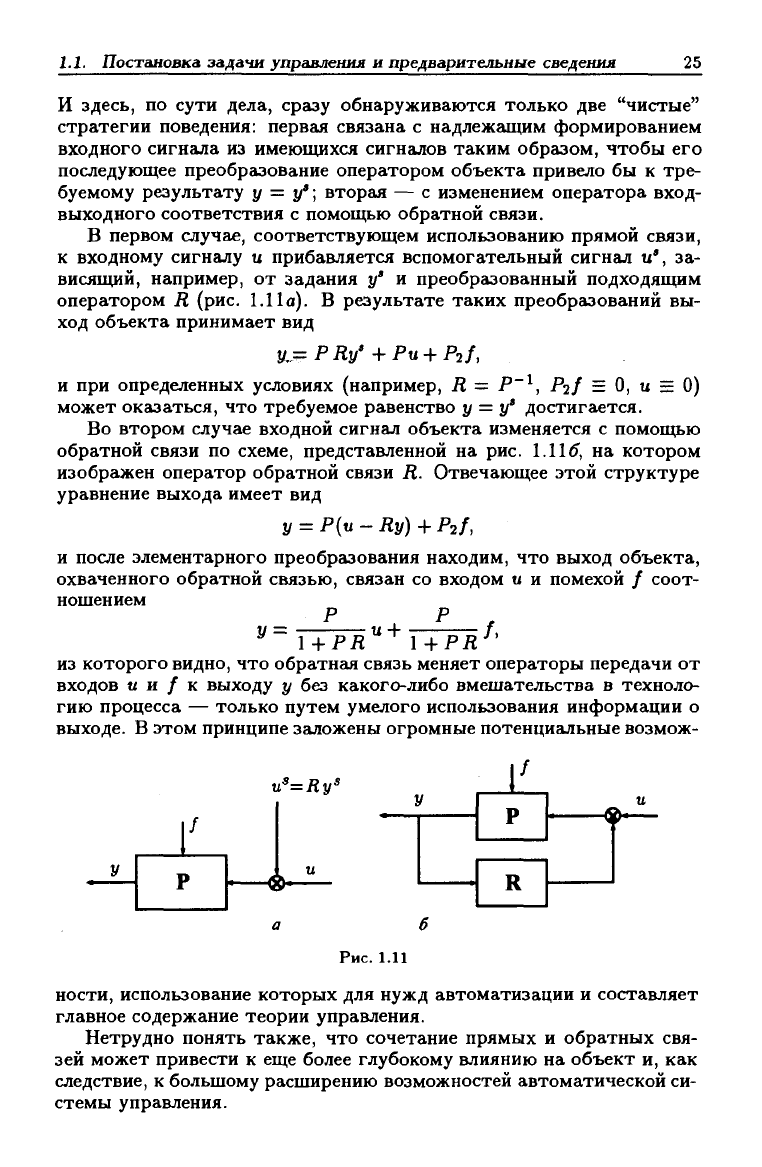
В первом случае, соответствующем использованию прямой связи,
к входному сигнгшу и прибавляется вспомогательный сигнал и', за-
висящий, например, от задания у' и преобразованный подходящим
оператором R (рис.
1.11а).
В результате таких преобразований вы-
ход объекта принимает вид
y,.=
PRy'+Pu+P2f,
и при определенных условиях (например, R = Р~^, Рг/ = О, и = 0)
может оказаться, что требуемое равенство у = у' достигается.
Во втором случае входной сигнал объекта изменяется с помощью
обратной связи по схеме, представленной на рис.
1.115,
на котором
изображен оператор обратной связи R. Отвечающее этой структуре
уравнение выхода имеет вид
у = Р{и- Ry) + P2f,
и после элементарного преобразования находим, что выход объекта,
охваченного обратной связью, связан со входом и и помехой / соот-
ношением
Р Р ^
" 1 + PR
1-ЬРД"''
из которого видно, что обратная связь меняет операторы передачи от
входов и и f к выходу у без какого-либо вмешательства в техноло-
гию процесса — только путем умелого использования информации о
выходе. В этом принципе заложены огромные потенцигильные возмож-
u^=Ry'
Н^
ii
R
Рис.
1.11
ности, использование которых для нужд автоматизации и составляет
главное содержание теории управления.
Нетрудно понять также, что сочетание прямых и обратных свя-
зей может привести к еще более глубокому влиянию на объект и, как
следствие, к большому расширению возможностей автоматической си-
стемы управления.
26 Глава 1. Принципы
построения
линейных
систем
Опишем теперь приведенные выше принципы на языке дифферен-
циальных уравнений, используя для этого следующий пример. Пусть
объект описывается дифференциальным уравнением второго порядка
У
+ озу + аху = « + / (1.1)
с постоянными параметрами oi, ог и возмущением /. Отметим, что
этому примеру при "операторном" описании объекта соответствуют
операторы Р и Рг с передаточными функциями
W(s) = W2(s) = ^
s2 +
028
+ ai '
Пусть R — оператор прямой связи по заданию у' с передаточной
функцией
WR(s) =
b2S
+ bi,
где 61,62 — постоянные параметры. Тогда в соответствии с рис. 1.11а
имеем
и' = у' + biy,
и выход объекта является теперь решением дифференциального урав-
нения
у + а2У + а1у = б2у'-f-6iy'+/-I-U, (1.2)
которое отличается от исходного уравнения (1.1) дополнительным
слагаемым в правой части. Так как общее решение линейного уравне-
ния складывается из произвольного решения однородного уравнения
У
+ а2У + а1У = 0
и частного решения неоднородного уравнения (1.2), то прямая связь
влияет только на это частное или, как говорят, вынужденное решение
и не оказывает никакого воздействия на его свободное движение.
Напротив, если мы используем обратную связь по схеме, предста-
вленной на рис.
1.115,
например с тем же самым оператором R, то в ре-
зультате получим дифференциальное уравнение замкнутой системы
управления сначала в таком виде:
у +
а2У
+ аху = -бгУ - 6iy
-I-
«
-I-
/,
а после элементарного преобразования — в окончательном виде:
y+(a2 + 62)y+(ai+fri)y=w + /. (1.3)
Из (1.3) следует, что обратная связь не изменяет правой части
уравнения, но может быть использована для изменения параметров
дифференциального уравнения. Это означает, что обратная связь
влияет не только на собственные движения объекта, но и на выну-
жденные его движения. Разумеется, использование прямой и обрат-
ной связи может только "углубить" влияние на поведение объекта.
1.1.
Постановка задачи управления и предварительные сведения
27
Приведенный пример уместно использовать для иллюстрации двух
важных для теории автоматического управления понятий. Это поня-
тия статики и динамики системы управления.
Рассмотрим уравнение (1.1) и положим сначала, что вход и = О, а
возмущение / = /о = const. Тогда получим
y + a2Jf + aiy = /о-
Общее рещение этого уравнения, как известно, содержит два сла-
гаемых:
где J/CB(^) — произвольное решение однородного уравнения и
j//(t)
—
частное решение неоднородного уравнения. В данном случае, что не-
трудно проверить прямой подстановкой,
У
J
W = — = У' = const.
Это решение также называют установившимся решением или ста-
тикой системы, а разницу y{t)
—
/o/ai — переходным решением, пе-
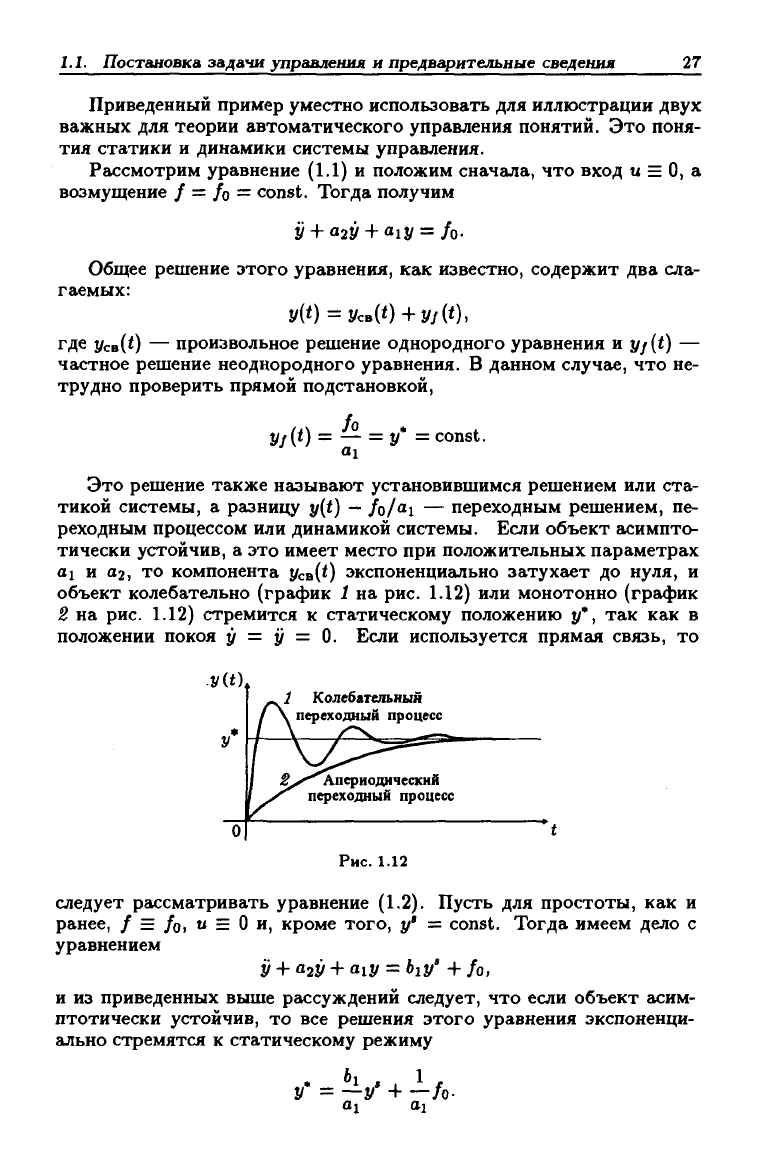
реходным процессом или динамикой системы. Если объект асимпто-
тически устойчив, а это имеет место при положительных параметрах
01 и 02, то компонента Усв(0 экспоненциально затухг^т до нуля, и
объект колебательно (график / на рис. 1.12) или монотонно (график
2 на рис. 1.12) стремится к статическому положению у*, так как в
положении покоя у = j/ = 0. Если используется прямая связь, то
.y(t)
, 1 Колебательный
переходный процесс
.^.^^периодический
переходный процесс
Рис. 1.12
следует рассматривать уравнение (1.2). Пусть для простоты, как и
ранее, / = /о, ы =
О
и, кроме того, у' — const. Тогда имеем дело с
уравнением
У
+ агу
-I-
aiy = Ьгу' + /о,
и из приведенных выше рассуждений следует, что если объект асим-
птотически устойчив, то все решения этого уравнения экспоненци-
ально стремятся к статическому режиму
У
= —У +—/о-
01 ai
28 Глава 1. Принципы
построения
линейных
систем
Следовательно, прямая связь не влияет на динамику, а только на
статику системы управления. Так как в желаемом режиме у = у', то
разница
. , ai
—
bi , 1 ,
т}
=
У
-У = у' /о
«1 ai
определяет ошибку стабилизации и называется статической ошибкой
системы управления. Поскольку параметр 6i характеризует прямую
связь, то последняя может применяться для уменьшения статической
ошибки, например, при 6i = oi ошибка
1 ,
T]
=
-—fo.
Рассмотрим теперь обратную связь и уравнение (1.3) при тех же
предположениях (и = О, / = /о), т.е. исследуем уравнение
у +
{а2
+
Ь2)у
+ (ai + bi)y = /Q.
В этом случае надлежащим выбором параметров обратной связи bi, 63
замкнутую систему управления можно всегда сделать Еи;имптотически
устойчивой, следовательно, обратная связь меняет динамику системы.
Но не только. Поскольку в установившемся режиме
ai+bi'
то и статика зависит от обратной связи. В частности, увеличивая
параметр 6i, можно уменьшать статическую ошибку. Подчеркнем,
что такг1я возможность в системах с прямой связью отсутствует.
Перейдем к описанию методов синтеза стг1билизирующих регуля-
торов.
1.2. Принцип регулирования по нагрузке
Простейшая задача стабилизации возникает при отсутствии коорди-
натного возмущения, т.е. когда / = 0. В этом случае уравнение
объекта имеет вид
у = Ри, (1.4)
и решение рассматривг1емой задачи дает так называемое программное
управление
и' =
р-'у',
(1.5)
где Р~^ — оператор, обратный оператору Р, т.е. оператор, удовле-
творяющий равенству РР~^ — 1. Действительно, после подстановки
(1.5) в уравнение объекта (1.4) последовательно находим
у = Ри'
=РР-^у'
=у\
и задача решена.
1.2. Принцип регулирования по нагрузке 29
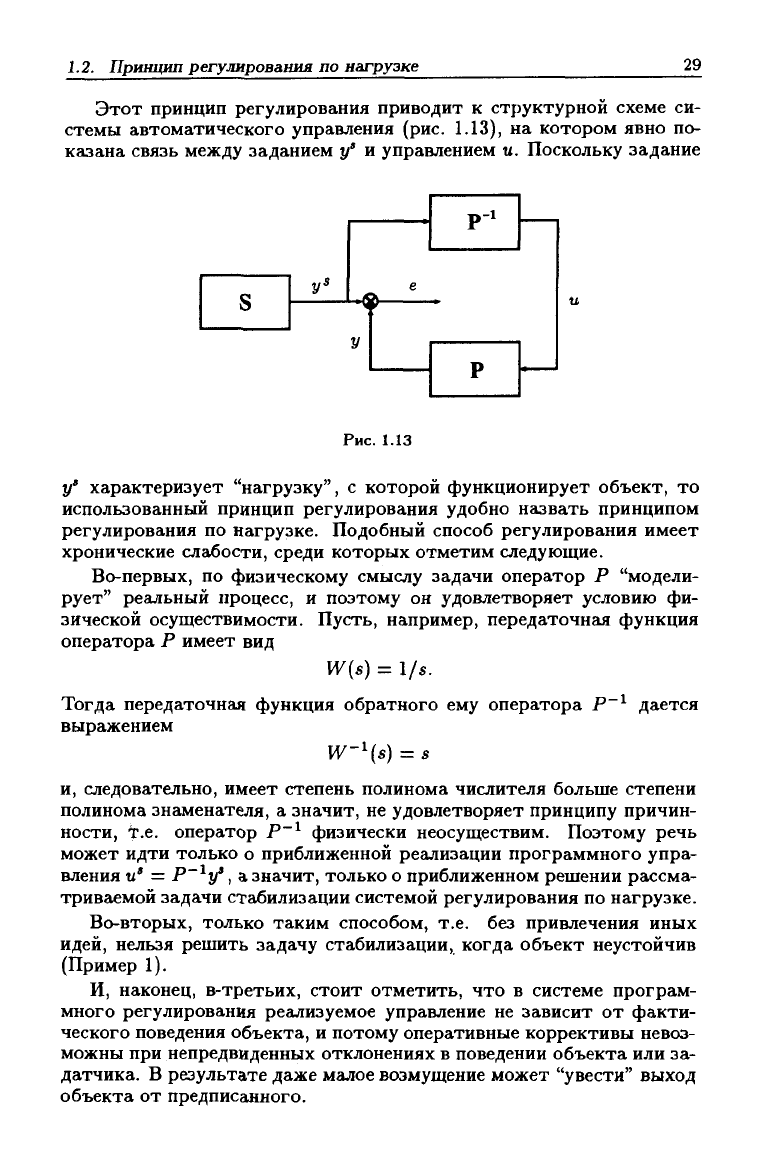
Этот принцип регулирования приводит к структурной схеме си-
стемы автоматического управления (рис.
1.13),
на котором явно по-
казана связь между заданием у' и управлением и. Поскольку задание
S
у'
.jpi
•V
у
е
V'
р
Рис.
1.13
у'
характеризует "нагрузку", с которой функционирует объект, то
использованный принцип регулирования удобно назвать принципом
регулирования по нагрузке. Подобный способ регулирования имеет
хронические слг1бости, среди которых отметим следующие.
Во-первых, по физическому смыслу задачи оператор Р "модели-
рует" реальный процесс, и поэтому он удовлетворяет условию фи-
зической осуществимости. Пусть, например, передаточная функция
оператора Р имеет вид
W(s) = 1/s.
Тогда передаточная функция обратного ему оператора Р~^ дается
выражением
W-^is)=s
и, следовательно, имеет степень полинома числителя больше степени
полинома знаменателя, а значит, не удовлетворяет принципу причин-
ности, т.е. оператор Р~^ физически неосуществим. Поэтому речь
может идти только о приближенной реализации программного упра-
вления и' = Р'^у", а значит, только о приближенном решении рЕи;сма-
тривг1емой задачи стабилизации системой регулирования по нагрузке.
Во-вторых, только таким способом, т.е. без привлечения иных
идей, нельзя решить задачу стабилизации, когда объект неустойчив
(Пример 1).
И, наконец, в-третьих, стоит отметить, что в системе програм-
много регулирования реализуемое управление не зависит от факти-
ческого поведения объекта, и потому оперативные коррективы невоз-
можны при непредвиденных отклонениях в поведении объекта или за-
датчика. В результате даже мгшое возмущение может "увести" выход
объекта от предписанного.
30
Глава I. Принципы
построения
линейных
систем
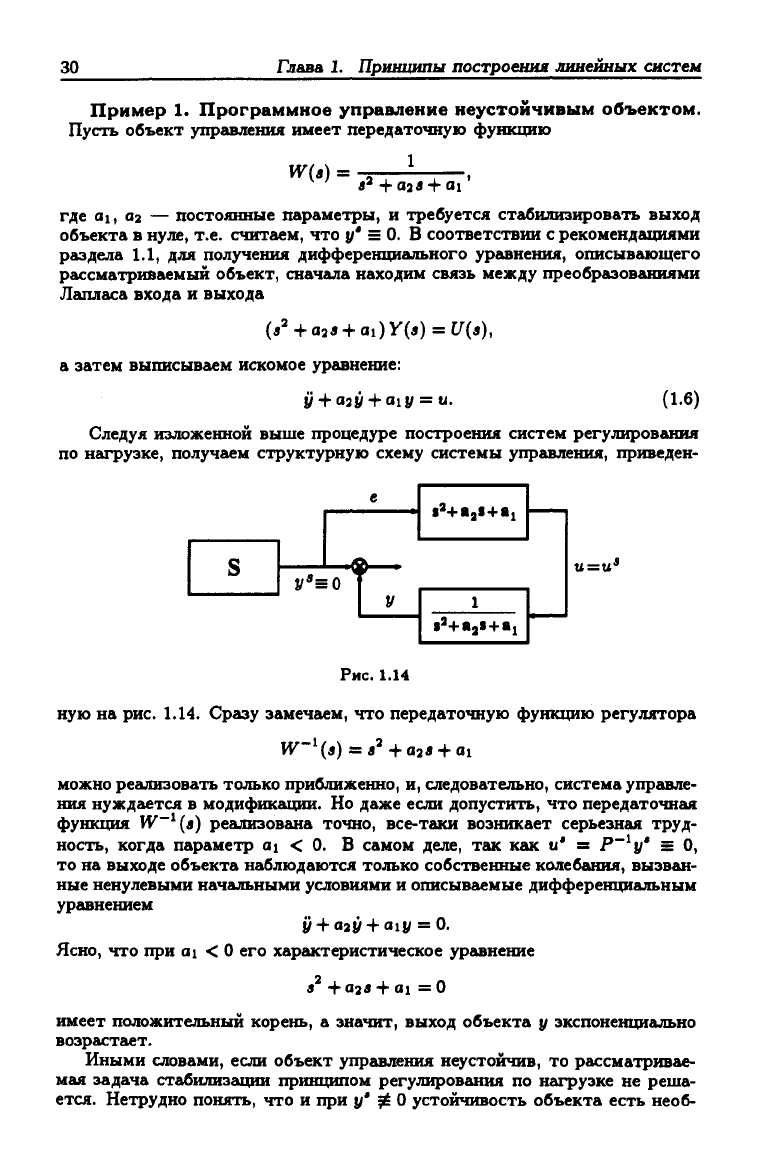
Пример 1. Программное управление неустойчивым объектом.
Пусть объект управления имеет передаточную функцию
W{s) =
а^
+aj« + ai
где Qi, 02 — постоянные параметры, и требуется стабилизировать выход
объекта в нуле, т.е. считаем, что у' = 0. В соответствии с рекомендациями
раздела 1.1, для получения дифференциального уравнения, описывающего
ргъссматриваемый объект, сначала находим связь между преобразованиями
Лаплгъса входа и выхода
(s*+a2a + ai)y(5) = t/{*).
а затем выписываем искомое уравнение:
(1.6)
Следуя изложенной выше процедуре построения систем регулирования
по нгорузке, получгъем структурную схему системы управления, приведен-
u=u*
S
е
л
I/*sO '
У
»»+«а«+в1
1
I'+Kji+a,
Рис.
1.14
ную на рис. 1.14. Сразу замечаем, что передаточную функцию регулятора
W~'(e) =«'+02^ + 01
можно реализовать только приближенно, и, следовательно, система управле-
ния нуждается в модификации. Но даже если допустить, что передаточная
функция ^'''^(в) реализовгша точно, все-таки возникает серьезная труд-
ность, когда параметр ai < 0. В самом деле, так как и' = Р~^у' = О,
то на выходе объекта наблюдаются только собственные колебания, вызван-
ные ненулевыми начальными условиями и описываемые дифференциальным
уравнением
У
+ азу
+
aiy = 0.
Ясно, что
при
ai
< О
его характеристическое уравнение
s'
-I-02*-1-01 =0
имеет положительный корень, а значит, выход объекта у экспоненциально
возрги;тг1ет.
Иными словами, если объект управления неустойчив, то рассматривае-
мая задача стабилизации принципом регулирования по нагрузке не реша-
ется. Нетрудно понять, что и при у' ^
О
устойчивость объекта есть необ-