Емельянов С.В. Новые типы обратной связи
Подождите немного. Документ загружается.

2.2.
Стабилизация объекта
с неопределенным
оператором
101
При использовании в обратной связи конечных коэффициентов пе-
редачи (именно это является признаком прочной системы) в теории
адаптивного управления регулятор R конструируют в виде двух ком-
понент _
Д = Д + ДД,
где выбор первой компоненты R направляют на стабилизацию опре-
деленного объекта Р, тогда как вторая компонента ДД должна ком-
пенсировать (устранить) влияние неопределенности ДР на поведение
системы.
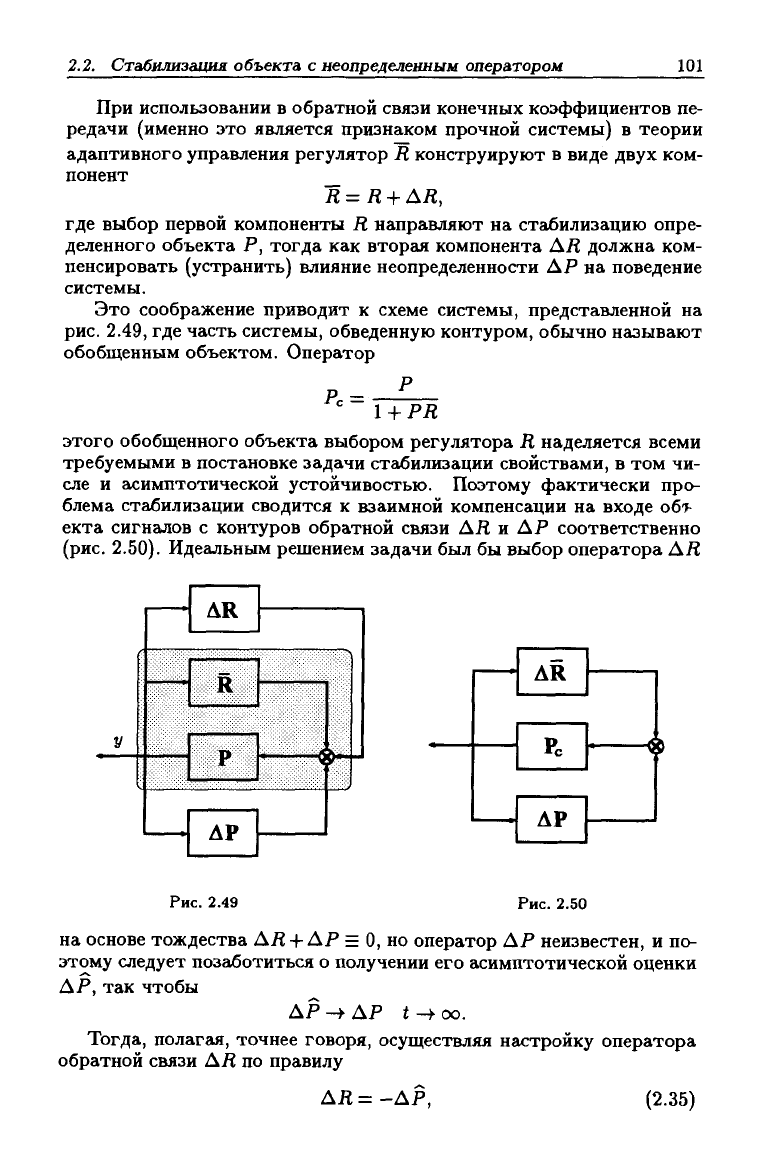
Это соображение приводит к схеме системы, представленной на
рис.
2.49, где часть системы, обведенную контуром, обычно называют
обобщенным объектом. Оператор
^""TTPR
этого обобщенного объекта выбором регулятора Д наделяется всеми
требуемыми в постановке задачи стабилизации свойствами, в том чи-
сле и асимптотической устойчивостью. Поэтому фактически про-
блема стабилизации сводится к взаимной компенсации на входе объ-
екта сигналов с контуров обратной связи ДД и ДР соответственно
(рис.
2.50). Идеальным решением задачи был бы выбор оператора ДД
,
у
\
ДК
R
Р
АР
^
Q
>--
AR
АР
Ф
Рис.
2.49
Рис.
2.50
на основе тождества AR-\-AP = О, но оператор ДР неизвестен, и по-
этому следует позаботиться о получении его асимптотической оценки
ДР,
так чтобы
ДР ->• ДР t-^oo.
Тогда, полагая, точнее говоря, осуществляя настройку оператора
обратной связи ДД по правилу
ДД=-ДР,
(2.35)
102 Глава 2.
Некоторые
принципы
построения
нелинейных регуляторов
можно рассчитывать на асимптотическое решение задачи стабилиза-
ции, так как в этом случае справедлива асимптотика
AR + AP = -AP + AP-^0, t-^oo.
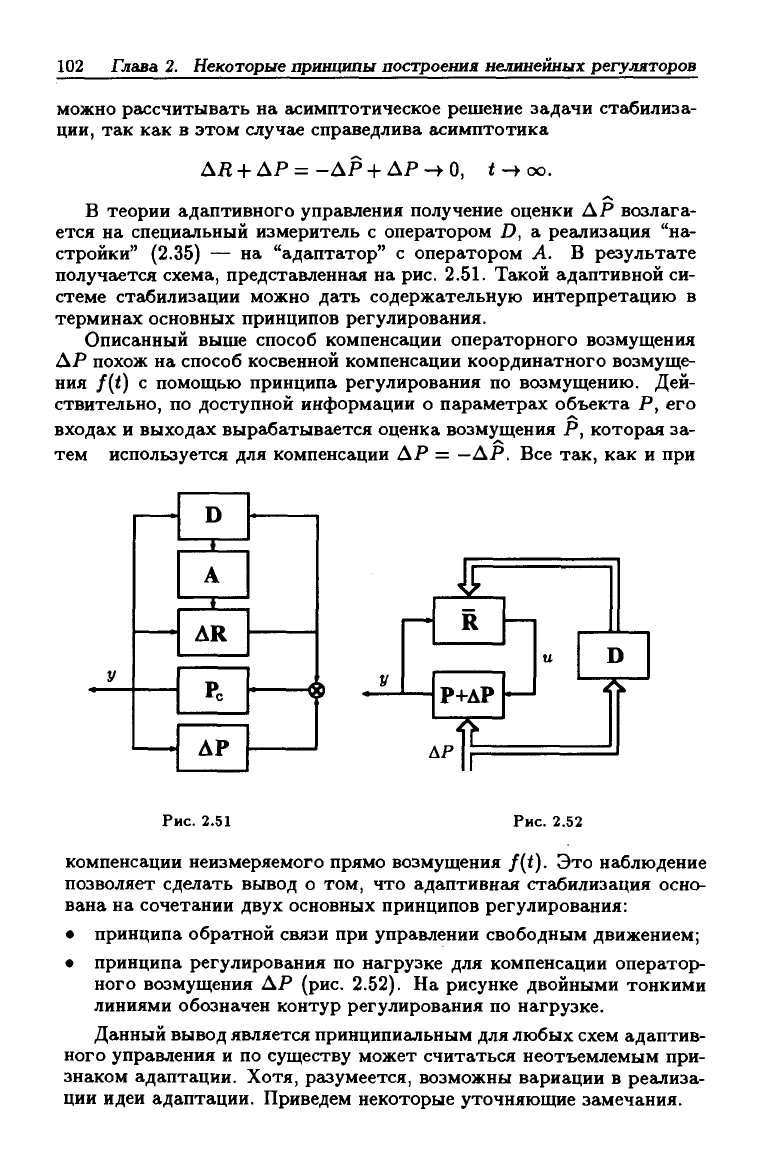
В теории адаптивного управления получение оценки АР возлага-
ется на специальный измеритель с оператором D, а реализация "на-
стройки" (2.35) — на "адаптатор" с оператором А. В результате
получается схема, представленная на рис. 2.51. Такой адаптивной си-
стеме стабилизации можно дать содержательную интерпретацию в
терминах основных принципов регулирования.
Описанный выше способ компенсации операторного возмущения
АР похож на способ косвенной компенсации координатного возмуще-
ния /(f) с помощью принципа регулирования по возмущению. Дей-
ствительно, по доступной информации о параметрах объекта Р, его
входах и выходах вырабатывается оценка возмущения Р, которая за-
тем используется для компенсации АР = —АР. Все так, как и при
D
AR
АР
-9
Ж
R
Р+АР
-f
D
Рис. 2.51
Рис. 2.52
компенсации неизмеряемого прямо возмущения /(<). Это наблюдение
позволяет сделать вывод о том, что адаптивная стабилизация осно-
вана на сочетании двух основных принципов регулирования:
• принципа обратной связи при управлении свободным движением;
• принципа регулирования по нагрузке для компенсации оператор-
ного возмущения АР (рис. 2.52). На рисунке двойными тонкими
линиями обозначен контур регулирования по нагрузке.
Данный вывод является принципиальным для любых схем адаптив-
ного управления и по существу может считаться неотъемлемым при-
знаком адаптации. Хотя, разумеется, возможны вариации в реализа-
ции идеи адаптации. Приведем некоторые уточняющие замечания.
2.2.
Стабилизация объекта с неопределенным оператором
103
Замечание 1. Имеются варигщии описанной выше схемы адаптгщии.
Например, для выполнения условия компенсации
ДЛ+ДР=0
можно менять не только (а может быть и не столько) оператор регулятора
AR,
но и оператор объекта ДР. Для этого, разумеется, должна иметься
соответствующая возможность представления ДР в виде суммы
ДР = ДР' + ДР",
где ДР' — неизвестная, а ДР" — настраиваемг1Я часть. В этом случгке го-
ворят о методе нгкстраивг1емого объекта, в отличие от предыдущего случая,
когда мы имели дело с настргкиваемой обратной связью.
Замечание 2. Поскольку оценка ДР вырабатывается по измерениям
координат объекта р или системы Рс, а также их входов, то понятно, что
наиболее просто это делается тогда, когда изменения ДР происходят "мед-
леннее" изменений этих переменных. В этом смысле говорят о квазиста-
ционарном изменении оператора ДР, а фгжтически при расчете обратной
связи ориентируются на стационарный оператор ДР. Бели построенная та-
ким образом адгиггивная система прочна, то она сохраняет работоспособ-
ность и при "медленных" изменениях в силу устойчивости прочных систем
по отношению к постоянно действующим возмущениям.
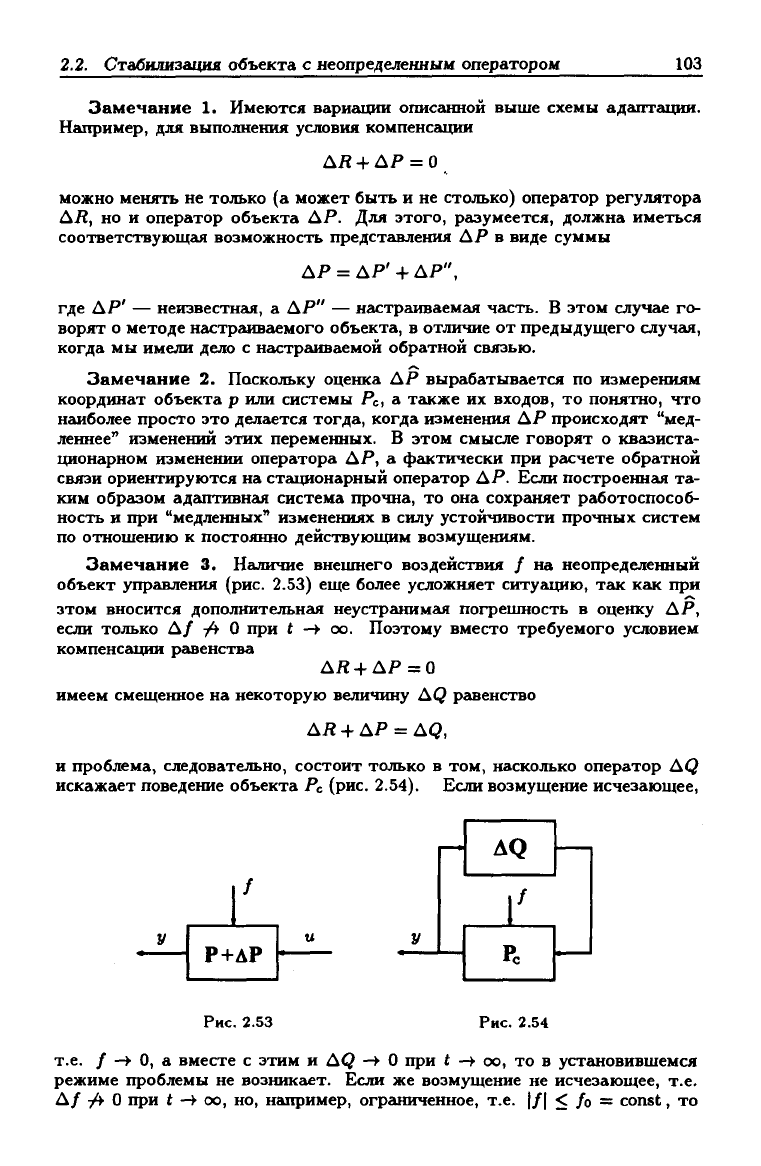
Замечание 3. Нг1личие внешнего воздействия / на неопределенный
объект упргшления (рис. 2.53) еще более усложняет ситуацию, так как при
этом вносится дополнительн£1Я неустранимая погрешность в оценку Др,
если только Д/ -/^ О при t
—¥
оо. Поэтому вместо требуемого условием
компенсгщии ргшенства
ДД+ДР=0
имеем смещенное на некоторую величину Д^ рг1венство
ДД + ДР = Д(г,
и проблема, следовательно, состоит только в том, насколько оператор Д^
искажает поведение объекта Рс (рис. 2.54). Если возмущение исчезающее.
Г
Р+АР
У
AQ
Г
Рс
Рис.
2.53
Рис.
2.54
т.е.
/
—>
О, а вместе с этим и ДQ
—>
О при t —^ оо, то в установившемся
режиме проблемы не возникг1ет. Если же возмущение не исчезающее, т.е.
Д/ 7^
О
при t -)• оо, но, нгшример, огргшиченное, т.е. (/| < /о = const, то
104 Глава 2.
Некоторые
принципы
построения
нелинейных регуляторов
из-за использования ограниченных коэффициентов передачи в регуляторе
можно рассчитывать, вообще говоря, только на диссипативность замкнутой
системы упргюления с радиусом диссипативности порядка /о.
Замечание 4. При определенных условиях адаптивный подход поро-
ждает стабилизаторы универсального действия, т.е. тгисие регуляторы, для
применения которых нет необходимости точно знать не только параметры
объекта, но даже и его порядок. Подобные регуляторы называются уни-
версальными. Для успешного их использования требуется выполнение сле-
дующих условий:
• МС-условия (условия согласованности);
• минимальной фазовости объекта Р.
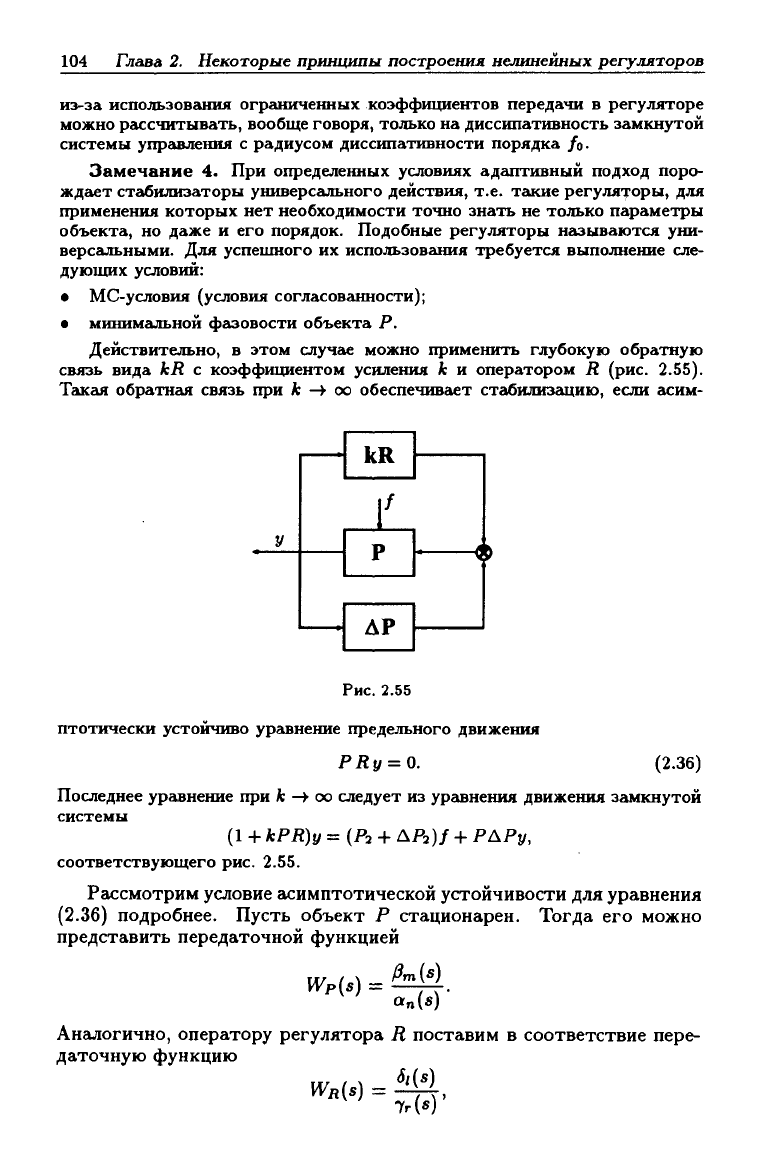
Действительно, в этом случае можно применить глубокую обратную
связь вида kR с коэффищ1ентом усиления к и оператором R (рис. 2.55).
Такая обратнёкя связь при к -^ оо обеспечивгъет стгъбилизгщию, если асим-
У
kR
1'
Р
АР
• f S
Y
Рис. 2.55
птотически устойчиво уравнение предельного движения
РЯу = 0.
(2.36)
Последнее уравнение при
А;
^ оо следует из уравнения движения замкнутой
системы
(1
-I-
kPR)y = (Рг + ДРг)/ + РАРу,
соответствующего рис. 2.55.
Рассмотрим условие асимптотической устойчивости для уравнения
(2.36) подробнее. Пусть объект Р стационарен. Тогда его можно
представить передаточной функцией
Wp{s)
I3m(s)
an{s) '
Аналогично, оператору регулятора R поставим в соответствие пере-
даточную функцию

2.2.
Стабилизация объекта
с неопределенный
оператором
105
где /3, а, S, f — полиномы комплексной переменной s, а индексы т,
п,
I я г — степени соответствующих полиномов. Тогда уравнение
предельного движения
PRy =
Q
эквивалентно уравнению
p,r^{s)Si{s)Y(s)
= 0, (2.37)
где Y{s) = С[у] — одностороннее преобразование Лапласа функции
y{t).
Из (2.37) видно, что полином /?m(s) должен быть гурвицевым,
что и означает минимальную фазовость объекта Р.
Непрочность рассматриваемой системы с глубокой обратной свя-
зью в универсальном стабилизаторе преодолевается тем, что коэффи-
циент обратной связи зависит от переменных состояния, например,
от выхода объекта
к
=
к{у,...),
и монотонно увеличивается до тех пор, пока не наступает, при указан-
ных выше условиях, устойчивость (при /
—>
0) или диссипативность
(при 1/1 < /о) следующего уравнения:
(.Щ^'")
+ PRjy = {P2 + ДРз)/ + РАРу.
Пример 13. Синтез адаптивной системы управления. Рассмо-
трим на примере стабилизации в нуле объекта второго порядка
Х2 = axi +bu, \ • I
с неопределенными коэффициентами а и Ь > О, одну из наиболее распро-
страненных методик синтеза адаптивного управления.
Замкнем объект (2.38) обратной связью
U = —fclXl — ^2^2
и сформируем алгоритмы адглтации Л переменных ^i, ^2:
*:i=6,
^2=6, (2.39)
т.е.
г1лгоритмы настройки параметров ki, /сг, таким образом, чтобы пове-
дение замкнутой системы Е*:
XI = Х2,
Х2
=
—{bki —
a)xi
—
bfcjxa,
было бы подобно (может быть, даже близко) поведению некоторой эталон-
ной системы Е-,:
«1 = 22,
22 = -7121 - 7222.
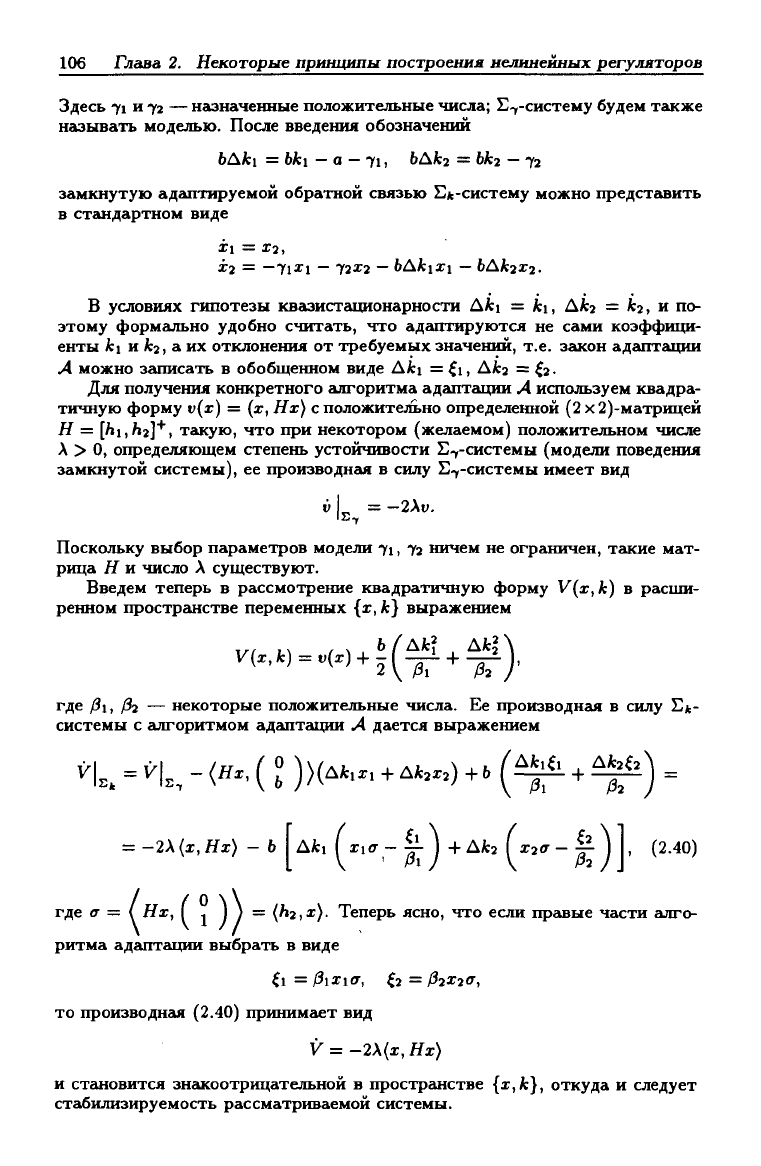
106 Глава 2. Некоторые принципы построения нелинейных регуляторов
Здесь 71 и
72
— назначенные положительные числа; Е.у-систему будем также
называть моделью. После введения обозначений
bAfci = bki
—
а
—
711 ЬАк2 = bfcj
—
72
замкнутую адаптируемой обратной связью Е;ь-систему можно представить
в стандартном виде
XI = 12,
Х2 = —71^1
—
721^2
—
b/\kixi
—
ЬАк2Х2.
в условиях гипотезы квазистационарности Aki = ki, А^г = ^2, и по-
этому формально удобно считать, что адаптируются не сами коэффици-
енты ki и ^2, а их отклонения от требуемых значений, т.е. згккон адаптации
А можно згшисать в обобщенном виде Aki =
^1,
ДЛг = ^2-
Для получения конкретного алгоритма адгштации Л используем квадра-
тичную форму t)(x) = (х, Нх) с положительно определенной (2 х 2)-матрицей
Н = [hi,h2]'*', тгисую, что при некотором (желаемом) положительном числе
Л > О, определяющем степень устойчивости Е-^-системы (модели поведения
замкнутой системы), ее производная в силу Е-^-системы имеет вид
I) 1
= -2Xv.
Is.,
Поскольку выбор параметров модели 7i, 72 ничем не огргшичен, такие мат-
рица Н и число А существуют.
Введем теперь в рассмотрение квадратичную форму V{x,k) в расши-
ренном простргшстве переменных {х, к} выражением
,^, ,, , , bfAkj Akl\
Vix,k) =
vix)+-i^-^+^j,
где Pi,
132
— некоторые положительные числа. Ее производная в силу Е*-
системы с алгоритмом адглтации Л дается выражением
^U =^U-(^-.( г )>(А^1-1 +А.2Х2)-ЬЬ (^ + ^) =
= -2\{х,Нх) -Ь Aki(xia-^\-\-Ak2(x2(T-^\ , (2.
где "• = ( Нх, ( 1 ) ) = {^2,х). Теперь ясно, что если правые части алго-
ритма адаптации выбрать в виде
$1 = /?lXl<T, ^2 = /32Х2<Т,
то производнскя (2.40) принимает вид
V = -2Х{х, Нх)
и становится знгикоотрицательной в простргшстве {х, к}, откуда и следует
стабилизируемость рассматриваемой системы.
40)
2.3.
Стабилиза1щя регулятором переменной структуры
107
Заметим, что сходимость погрешностей оценок Afci, Д^г к нулю при
этом не гарантируется, поскольку для такой сходимости требуется опре-
деленная отрицательность v в расширенном фазовом пространстве {х, к}.
Заметим также, мто при нгшичии координатного- возмущения /, т.е. при
стабилизации объекта Р' :
XI = Х2,
Х2 = —ахх -\-Ьи + f
указгшным выше способом, в итоговом выражении для производной v по-
явится дополнительное слагёкемое, пропорционгшьное возмущению
v = -2\{xi,Hx) + b(Tf,
которое при неизвестном / нарушает знакоотрицательность v и Хфи ограни-
чении 1/1 < /о ведет к диссипативности системы по основным переменным,
т.е.
задача стабилизации не решс1ется точно.
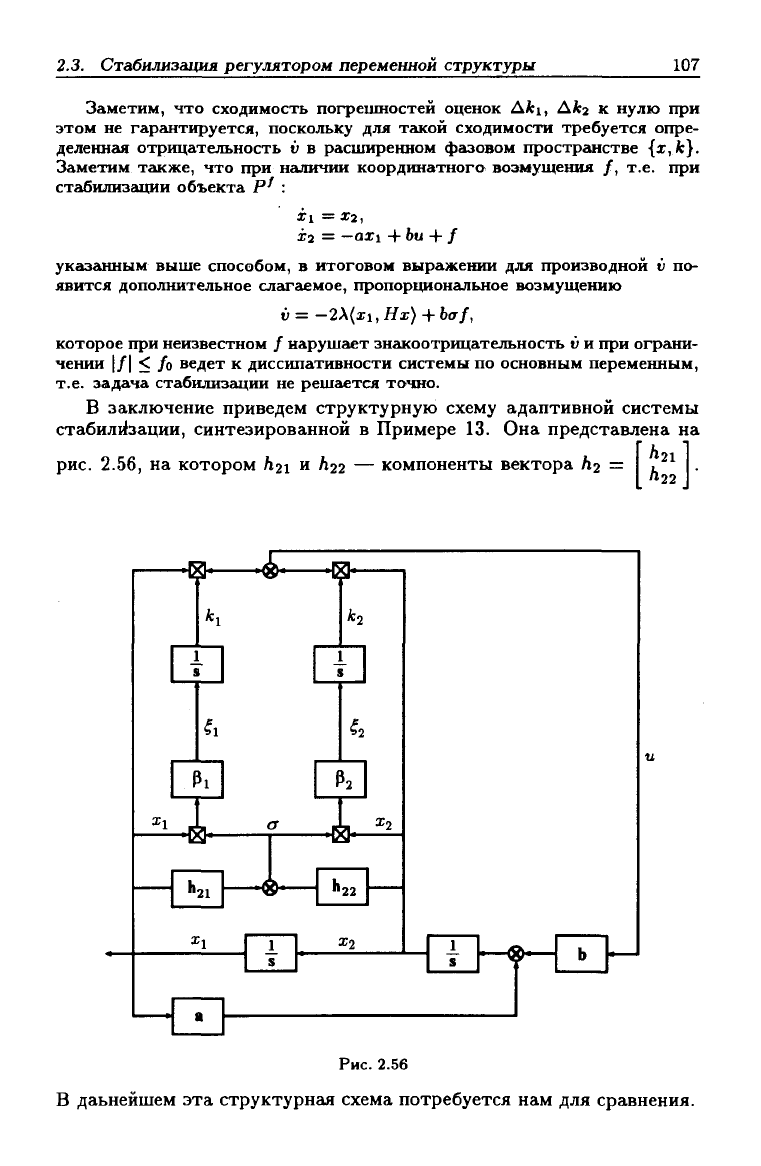
В заключение приведем структурную схему адаптивной системы
стабилизации, синтезированной в Примере 13. Она представлена на
рис.
2.56, на котором /i2i и Лгг — компоненты вектора Лг = i^^
"22
Рис.
2.56
В даьнейшем эта структурнг1я схема потребуется нам для сравнения.
108 Глава 2. Некоторые принципы построения нелинейных регуляторов
2.3.
Стабилизация регулятором
переменной структуры
Рассмотрим теперь еще одну попытку окончательного решения рас-
сматриваемой в монографии проблемы путем использования регуля-
торов с переменной структурой.
Идея принципа переменности структуры состоит в скачкообрг13-
ном изменении связей между функционгшьными элементами регуля-
тора в зависимости от фазового состояния замкнутой системы упра-
вления, которую в таком случае называют системой управления пе-
ременной структуры (СПС). Если рассматриваются линейные объект
и функциональные элементы регулятора, то соответствующую СПС
можно интерпретировать как совокупность линейных подсистем и
правил перехода от одного элемента этой совокупности к другому при
пересечении фазовой точкой разделительных гиперплоскостей в фа-
зовом пространстве системы, которые называют поверхностями ргиз-
рыва. Если же объект или функциональные элементы нелинейны, то
речь идет о совокупности нелинейных подсистем и, соответственно, о
нелинейных поверхностях или многообразиях разрыва.
И в первом и во втором случае СПС — нелинейная динамическая
система — описывается дифференциальными уравнениями с разрыв-
ными правыми частями. Синтез СПС сводится к выбору поверхно-
стей разрыва и исходной совокупности подсистем, гарантирующих
решение поставленной задачи управления. Мы не излагаем здесь те-
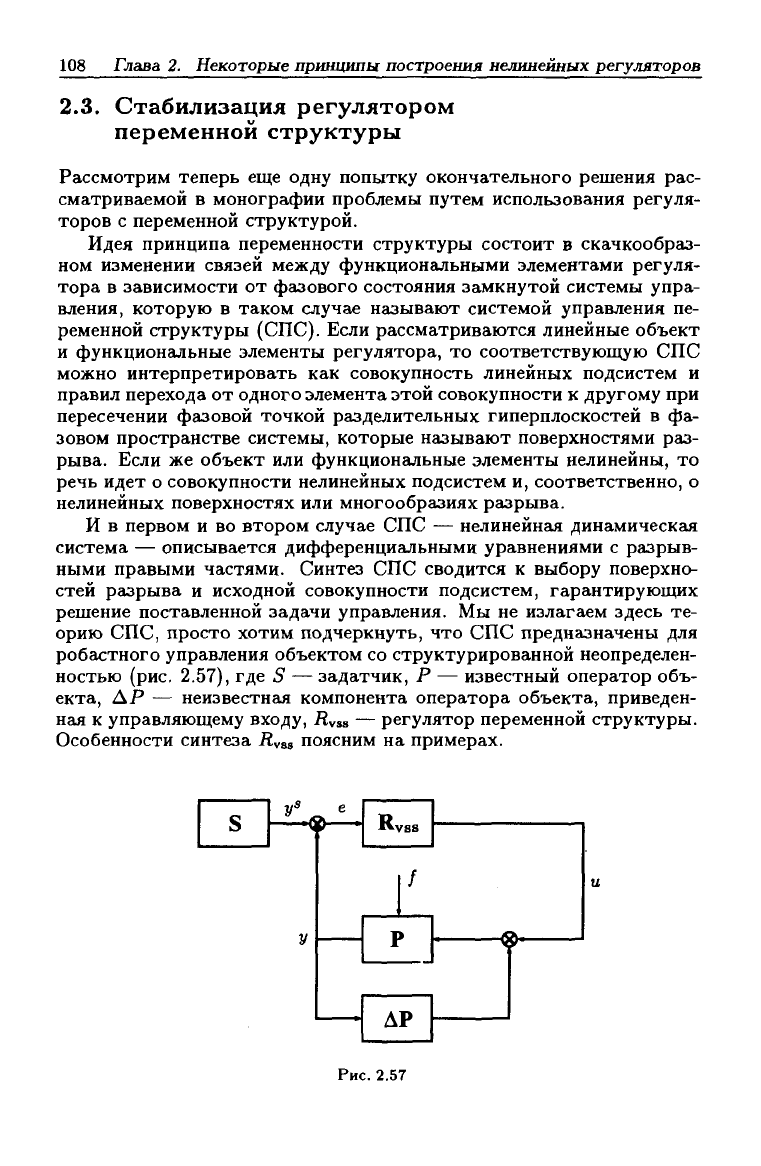
орию СПС, просто хотим подчеркнуть, что СПС предназначены для
робастного управления объектом со структурированной неопределен-
ностью (рис. 2.57), где S — задатчик, Р — известный оператор объ-
екта, АР — неизвестная компонента оператора объекта, приведен-
ная к управляющему входу, Rvss — регулятор переменной структуры.
Особенности синтеза Rvss поясним на примерах.
Н2>-
Rv
АР
н»-
Рис.
2.57
2.3.
Стабилизация
регулятором переменной
структуры
109
2.3.1.
Астатическая следящая система
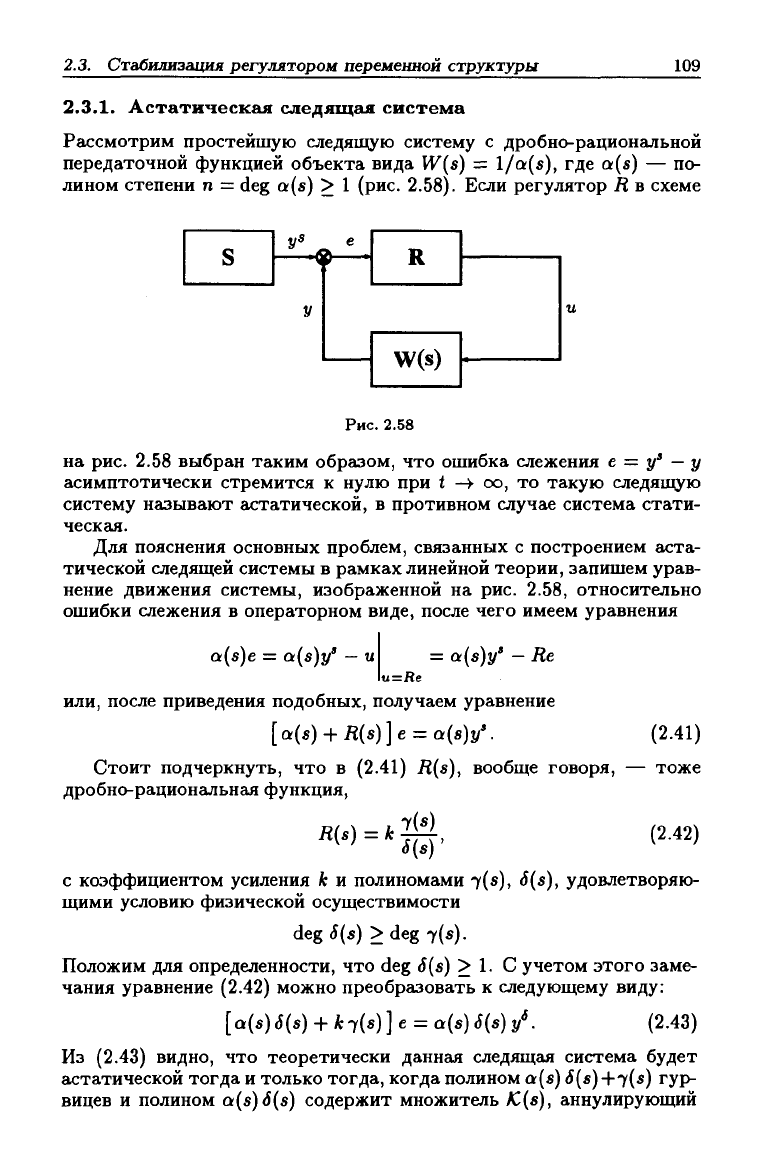
Рассмотрим простейшую следящую систему с дробно-рациональной
передаточной функцией объекта вида W(s) — l/a(s), где a(s) — по-
лином степени п = deg a(s) > 1 (рис. 2.58). Если регулятор R в схеме
-9
R
W(s)
Рис. 2.58
на рис. 2.58 выбран таким образом, что ошибка слежения е = у'
—
у
асимптотически стремится к нулю при <
—>•
оо, то такую следящую
систему называют астатической, в противном случае система стати-
ческая.
Для пояснения основных проблем, связанных с построением аста-
тической следящей системы в рамках линейной теории, запишем урав-
нение движения системы, изображенной на рис. 2.58, относительно
ошибки слежения в операторном виде, после чего имеем уравнения
a(s)e = a(s)y'
—
и = a(s)y' - Re
u=Re
или, после приведения подобных, получаем уравнение
[a{s) + R{s)]e = a{8)y'. (2.41)
Стоит подчеркнуть, что в (2.41) R{s), вообще говоря, — тоже
дробно-рациональная функция,
lis)
R{s) = к
4s)'
(2.42)
с коэффициентом усиления к и полиномами 7(*)> '^(*)i удовлетворяю-
щими условию физической осуществимости
deg S{s) > deg 7(*)-
Положим для определенности, что deg S(s) > 1. С учетом этого заме-
чания уравнение (2.42) можно преобразовать к следующему виду:
(2.43)
Из (2.43) видно, что теоретически данная следящг1я система будет
астатической тогда и только тогда, когда полином a(s) S{s)+'f(s) гур-
вицев и полином a(s)<J(s) содержит множитель /C(s), аннулирующий
[ a{s) 6{s) +
к
7(s)
]
е = a{s) S{s) /.
110 Глава 2.
Некоторые
принципы
построения
нелинейных регуляторов
функцию задания, т.е. такой, что
K{s)y' = О, (2.44)
либо,
если такого множителя K{s) нет, то:
1) полином 7(e) должен быть гурвицев;
2) в пределе при к
—¥
оо поведение системы описывается асимптоти-
чески устойчивым уравнением
l{s)e = 0. (2.45)
Впрочем, так как большие коэффициенты усиления приводят к не-
грубым системам, то реально при синтезе астатических систем при-
ходится ориентироваться на конечные коэффициенты передачи, а зна-
чит, и на гурвицевость полинома a{s) 5{s) + 7(5) и условие (2.44).
Если аннулирующий полином
IC{s)
является гурвицевым, то выпол-
нение указанных выше условий не вызывает принципигшьных ослож-
нений. Другое дело, когда полином /C(s) — неустойчивый, например
/С(в) = s^
—
а^, о = const > 0. Тогда мы сталкиваемся с серьезными
проблемами. В самом деле, полином S{s) не может быть неустойчи-
вым, ибо в противном случае неустойчива собственная динамика ре-
гулятора (2.42) и его выход u{t) экспоненциально нарастает со всеми
вытекаюпщми отсюда негативными последствиями: выходом за пре-
делы зоны линейности и т.п. Следовательно, неустойчивые компо-
ненты (множители) аннулирующего оператора K{s) должны быть од-
новременно множителями полинома a(s), что, конечно, неве{)оятно.
Это рассуждение показывает, что
• в рамках линейной теории управления, предполагающей исполь-
зование только ограниченных коэффициентов передачи в регуля-
торе,
построить гютатическую систему слежения за экспоненци-
ально растущим сигналом у' невозможно.
Мы рассмотрели две грубые ситуации: экспоненциально устойчи-
вые и экспоненциально неустойчивые K{s). Проанализируем теперь
пограничную ситуацию, когда задание
j/'
— полиномиально рги;тущая
функция времени, т.е.
у' = Cm+l^ +
С^*'"-Ч
... +С1,
где с,- — некоторые константы, (t = 1, ...
,
m
-(-
1), а число m — по-
рядок полинома, т.е. Cm+i ф 0. Простейшим оператором, аннулиру-
ющим полином (2.45), очевидно, является оператор (т -I- 1)-кратного
дифференцирования K{s) =
s"*'^^.
Естественно предполагать, что в
систему слежения он привносится регулятором, т.е.
S{8) = 5-+1
S'{S),
где S'(s) — некоторый устойчивый полином. Но в таком случае, в силу
необходимого условия устойчивости, для обеспечения гурвицевости