Емельянов С.В. Новые типы обратной связи
Подождите немного. Документ загружается.

2.4. Библиографический
комментарий
131
окрестности (т = О, негативно сказываются на работе механиче-
ских и электромеханических приводов, которые весьма часто ис-
пользуют на практике в качестве силовых установок. Это обсто-
ятельство делает невозможным практическое использование клас-
сических СПС.
• Моделирование стандартного скользящего режима на дискретной
ЭВМ возможно только методами 1-го порядка (Эйлера, Адамса и
т.д.),
так как методы более высоких порядков требуют существо-
вания производных от правой части дифференциального уравне-
ния. Это условие не выполняется для уравнений, описывающих
СПС.
При "дискретном" скольжении имеют место следующие со-
отношения:
(T~0(/i),
6-~0(/i),
где Л — шаг дискретизации, которые означают, 'что отклонение
траекторий от линии скольжения пропорционально шагу дискре-
тизации. Для повышения точности скольжения нужно уменьшать
шаг дискретизации h, что немедленно приводит к увеличению вре-
мени расчетов, так как последние имеют порядок 1/h. Именно это
обстоятельно делает невозможным прямое использование СПС по
скользящим режимам в системах прямого цифрового управления,
• Трудности стабилизации неопределенного объекта с относитель-
ным порядком г, таким, что 1<г<п
—
1. В значительной степени
эти трудности связаны с получением информации о состоянии не-
определенной системы, в частности, с получением "хороших" оце-
нок производных выходного сигнала объекта.
В связи с перечисленными обстоятельствами можно сформулировать
следующую проблему: построить систему управления со свойствами
идеальной СПС, но с гладкой обратной связью, прочной по отно-
шению к регулярным, сингулярным, функциональным и структурным
возмущениям. Эта проблема и рги;сматривг1ется во второй части мо-
нографии.
2.4.
Библиографический комментарий
Интерес к исследованию разрывных систем возник очень давно, на-
пример, в классической механике он появился в связи с анализом влия-
ния кулоновского трения и гистерезисных явлений, а в электротехнике
и радиотехнике — в связи с появлением стг1билизаторов, различных
генераторов, экономичных усилителей мощности и т.п.
Было замечно, что релейные системы склонны к автоколебаниям,
но наряду с этим некоторые движения в релейных системах мало чув-
ствительны к параметрам и потому оказались полезными при компен-
сации влияния факторов неопределенности на свойства системы ре-
гулирования. Потребность в целенаправленном использовании этого
132 Глава 2.
Некоторые
принципы
построения
нелинейных регуляторов
свойства, а также необходимость в средствах подавления автоколеба-
ний привели к созданию теории релейных систем. На первых этапах
значительный вклад в эту теорию внесли Х.Л- Хазен (H.L. Hazen) [91],
И. Флюгге-Лотц (I. Flugge-Lotz) [90] и Я.З. Цыпкин [75]. С совре-
менным состоянием теории релейных систем можно ознакомиться по
книгам [9, 14].
Интерес современной теории управления к релейным системам свя-
зан прежде всего с задачами оптимального быстродействия при огра-
ниченных ресурсах [60, 94]. Некоторые г1спекты релейной стабилиза-
ции в условиях неопределенности рг1Ссмотрены в работе [7]. Матема-
тические методы анализа скользящих режимов, возникающих в релей-
ных системах, можно найти в [71]. Проблемам управления неопреде-
ленными объектами посвящено много работ, см., например, [46, 55,
69,
73, 74, 76]. Основы теории систем автоматического управления
переменной структуры изложены в монографии [15].
Часть II
Новые типы обратной связи
Во второй части монографии излагаются теоретические основы по-
строения нового класса нелинейных систем автоматического управле-
ния. Математическую основу построения таких систем управления
составляет принцип бинарности, в соответствии с которым коорди-
наты и операторы нелинейных управляемых систем рассматриваются
в виде единой совокупности ее переменных состояния и между ними
не проводится принципиального различия. Более того, каждый эле-
мент такой совокупности может выступать в качестве координаты
или оператора, а содержательная интерпретация переменной состоя-
ния предопределена ее ролью в конкретном локальном преобразова-
нии, и эта роль может, разумеется, меняться от преобразования к
преобразованию. Это означает, что операторы могут подвергаться
преобразованиям, аналогичным тем, которые используются для пре-
образования координат. Это обстоятельство немедленно ведет к необ-
ходимости введения новых типов обратной связи, когда целью обрат-
ной связи служит не формирование переменной, как в классической
теории регулирования, но оператора.
Сочетание принципа бинарности с принципом регулирования по
отклонению позволяет перейти к автоматическому формированию за-
конов управления в условиях, когда априорной информации недоста-
точно для прямого синтеза обратной связи, сообщающей замкнутой
системе управления требуемой совокупности свойств.
Во второй части развивается понятийный аппарат новой теории,
синтезируются обобщенные структуры замкнутых систем с новыми
типами обратной связи. Значительное внимание уделяется анализу
конкретных примеров.
Библиографическая справка. Общие принципы теории но-
вых типов обратной связи сформулированы в [18, 19, 79]. Первое
систематическое изложение этой теории можно найти в [17]. Раз-
134 Новые
типы обратной
связи
личным ее аспектам посвящены работы [20, 21, 37-42, 85-88]. Ста-
билизация неопределенных систем с использованием нестандартной
обратной связи рассмотрена в работах [26-28, 31-36, 44, 45, 81-84].
Математическая теория разрывных систем разработана А.Ф. Фи-
липповым в работе [72], а с различными прикладными аспектами
стандартных скользящих режимов можно ознакомиться в трудах [9,
14,
68]. Скользящим режимам высших порядков посвящены работы
[22,
23, 80]. Наиболее подробное на сегодня изложение этой теории
содержится в статье [25].
С проблемой получения высококачественных производных сигна-
лЬв можно ознакомиться по работам [1, б, 49]. Математические во-
просы дифференцирования рассмотрены в монографии [66], различ-
ные дискретные аппроксимации можно найти в книге [65], современ-
Н£1Я
трактовка проблемы дифференцирования дана в [2].
Проблема оптимального управления в ее современном виде офор-
милась благодаря ргьботам Л
.С.
Понтрягина (принцип максимума) [63]
и Р. Беллмана (принцип оптимальности) [4]. Оптимальное управле-
ние — наиболее прорг1ботанный и динамично развивающийся раздел
теории управления. Классическая теория представлена в рг1ботах [3,
5,
8, 10, 50, 54, 70, 94]. Численные аспекты оптимального управления
обсуждались в монографии [59]. Современная трактовка основных
идей оптимального управления дана в книге [51]. Обобщения изло-
женного в разделе метода субоптимального управления можно найти
в работах [29, 30, 43].
Глава 3
Общие положения теории
новых типов обратной связи
Основу новой теории составляет принцип бинарности, раскрывающий
двойственную природу сигналов в нелинейных динамических систе-
мах: сигналы могут выступать либо в качестве переменных, над ко-
торыми осуществляются преобразования, либо в качестве операто-
ров,
определяющих эти преобразования. Принцип бинарности позво-
ляет возложить синтез оператора стабилизирующей обратной связи
на вспомогательную нелинейную систему с обратной связью. Разви-
тие этой концепции и соответствующих методик синтеза привело к
необходимости рассмотрения трех новых типов обратной связи: опе-
раторной, операторно-координатной и координатно-операторной.
В данной главе излагаются основные понятия, определения и прин-
ципы построения систем автоматического управления с новыми ти-
пами обратной связи.
3.1.
Вводные замечания
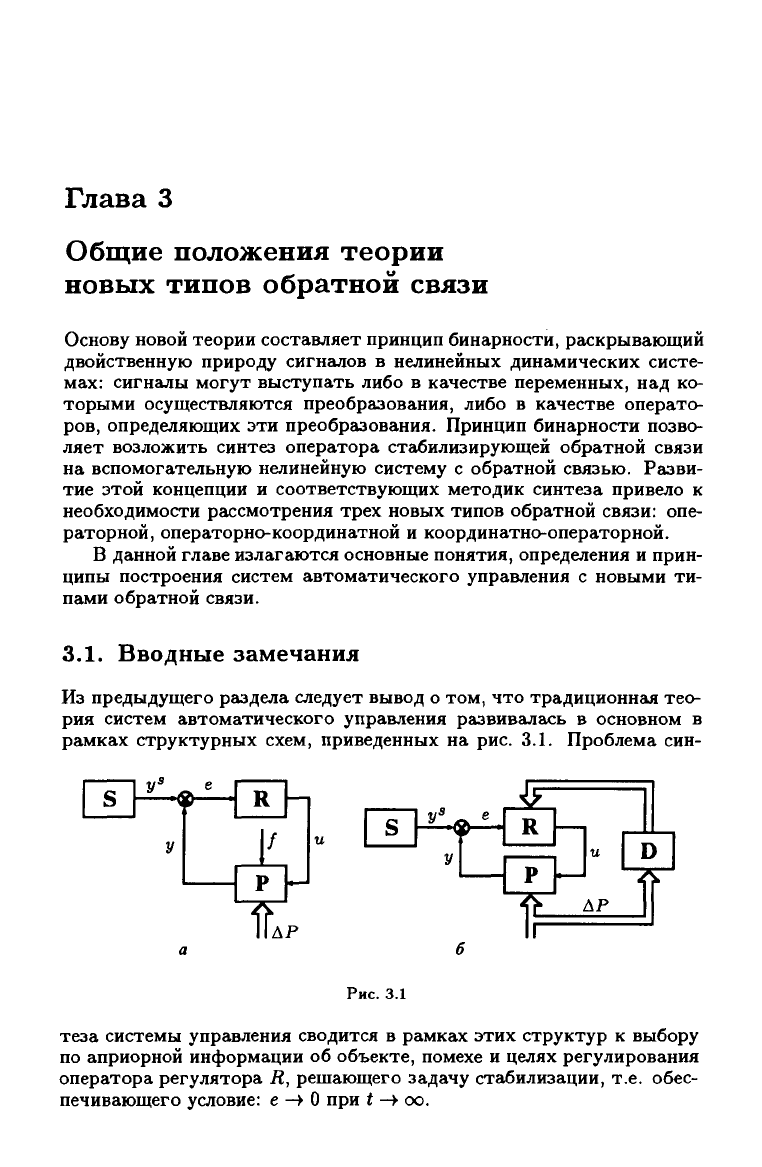
Из предыдущего раздела следует вывод о том, что традиционная тео-
рия систем автоматического управления развивалась в основном в
рамках структурных схем, приведенных на рис. 3.1. Проблема син-
S
У
е
9
R
К
р
%р
lle-L
Л
R
¥
D
2^
АР
Рис. 3.1
теза системы управления сводится в рамках этих структур к выбору
по априорной информации об объекте, помехе и целях регулирования
оператора регулятора R, решающего задачу стс1билизации, т.е. обес-
печивающего условие: е
—»•
О
при t -> оо.
136 Глава 3. Теория новых
типов обратной
связи
Если априорной информации достаточно для решения задачи син-
теза, т.е. информация точна и допускаются лишь малые отклонения
АР от модели линейного оператора Р, а внешних сил / —• от их вол-
новой модели, если, кроме того, цели регулирования заданы не очень
"жестко", то для синтеза стабилизирующего оператора R вполне при-
менимы описанные в предыдущем разделе классические методы син-
теза.
В тех случаях, когда отклонение АР не мало, а об изменениях ха-
рактеристик объекта управления можно получить в режиме on-line не-
обходимую информацию, в таких случаях можно организовать, также
в режиме on-line, поднастройку оператора обратной связи R по схеме
на рис. 3.15, принятой в теории адаптивного управления.
Если же изменения оператора объекта АР происходят интенсивно
и к тому же неконтролируемым образом, помеха / не является волно-
вой, кроме того, сформулированы "строгие" требования к качеству
регулирования, а также имеются ограничения на фазовые перемен-
ные и управление, то традиционные методы синтеза стабилизиру-
ющих регуляторов неприменимы и следует искать новые подходы к
синтезу САУ в таких сложных условиях.
При определении направления поиска, как обычно, полезно обра-
титься к опыту и аналогиям. Вспомним, что принцип обратной связи
заменил принцип регулирования по возмущению, когда это возмуще-
ние стало неизвестным. И если при известном возмущении целью син-
теза регулятора было получение "программы" u'{t), то при отсут-
ствии информации о возмущении целью синтеза регулятора стало по-
лучение его оператора R, вырабатывающего требуемый сигйал упра-
вления u{t) с помощью обратной связи. Сами же значения сигнала u{t)
стали несущественными, важно лишь то, что при правильном выборе
оператора R замкнутая система управления имеет требуемое свой-
ство,
а именно
e{t) ->
О,
t ^ 00.
Указанный выше переход от формирования сигнала к формированию
оператора, вырабатывающего нужный сигнал, можно возвести в прин-
цип и дать ему, например, следующую формулировку:
• при дефиците информации следует переходить от программного
формирования функции (элемента) к синтезу алгоритма (опера-
тора),
генерирующего функцию.
Как функция времени u{t) — элемент некоторого множества допусти-
мых управлений, так и оператор R — только элемент множества И
стабилизирующих обратных связей. Поэтому для получения требуе-
мого оператора R при дефиците информации используем сформулиро-
ванный выше принцип. Именно, будем синтезировать не сам опера-
тор обратной связи R, но алгоритм его формирования, а поскольку
все это происходит в условиях неопределенности, то без механизма
обратной связи здесь не обойтись. Заметим, что эта идея является
явной альтернативой идее адаптивного управления (рис. 3.16), когда с

3.2. Система базовых понятий
137
помощью процедуры идентификации реализуется "программная" ге-
нерация требуемого оператора R.
Сформулированный выше принцип впредь будем называв принци-
пом генерации. Разумеется, принцип генерации может быть распро-
странен и на формирование алгоритма, генерирующего оператор R, и
т.д.
и т.п. При применении принципа генерации естественным обра-
зом возникают следующие первоочередные вопросы:
• каким образом осуществлять синтез контура генерации;
• что будет ошибкой или регулируемой координатой такого контура;
• что следует применять в качестве регулирующего органа в этом
контуре;
• можно ли из этой идеи извлечь практическую выгоду, ведь контур
генерации можно рассматривать как часть регулятора, и откуда
следует, что такой синтез регулятора "по частям" проще синтеза
регулятора "в целом".
На некоторые из этих вопросов ответы даются легко, на другие
однозначных ответов нет вообще. Это означает, что в реализации
намеченного плана по автоматическому синтезу стабилизирующих ре-
гуляторов в условиях неустранимой неопределенности по априорной
и текущей информации много эвристики и произвола. 0тчг1сти это
можно устранить с помощью следующей системы базовых понятий.
3.2. Система базовых понятий
Для придания развиваемой теории конструктивного характера нам
потребуется ряд нестандартных для классической теории управления
понятий, и ключевое из них вводится в следующем пункте.
3.2.1.
Сигнал-оператор
Для обозначения того, что изменению подвергается оператор, будем
применять двойную стрелку (рис. 3.2). Соответствующую перемен-
ную обозначаем буквами греческого алфавита, например //, и пазы-
Ж
Рис.
3.2
138
Глава 3. Теории новых
типов обратной
связи
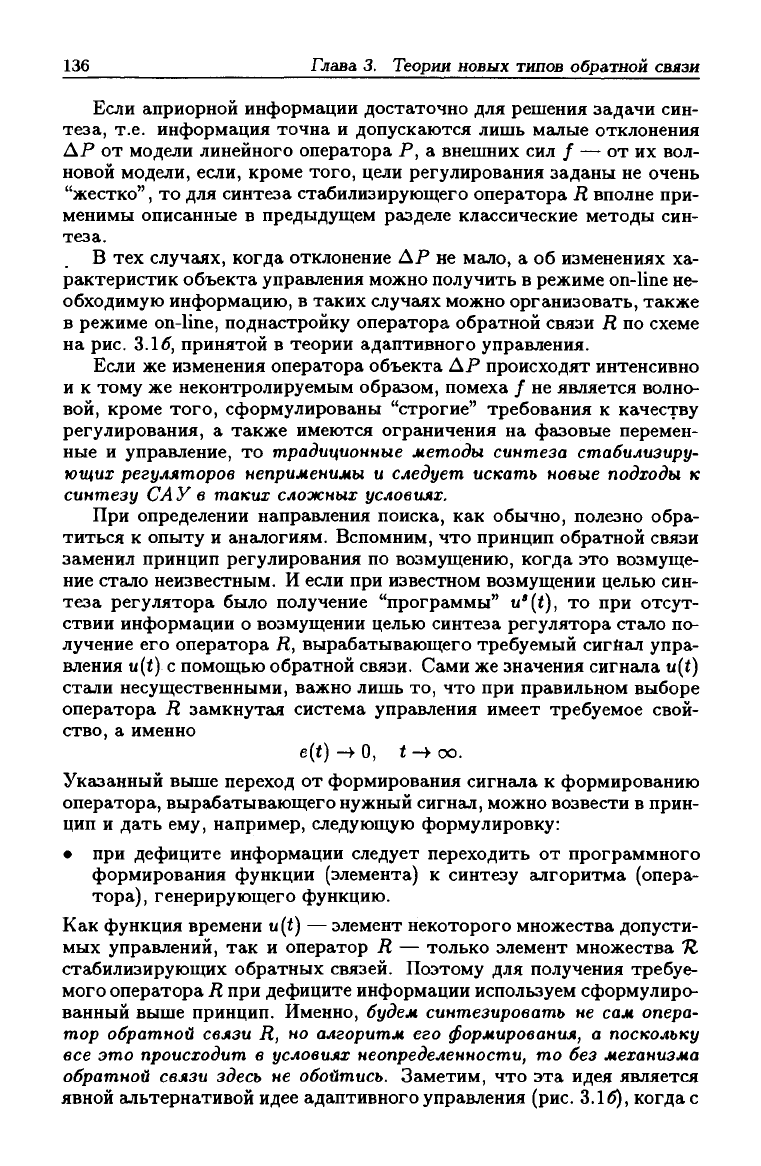
BBjeu
сигналом-оператором или для краткости 0-сигналом (рис. 3.3а)
в отличие от обычных переменных, обозначаемых латинскими бук-
вами и одинарными стрелками (рис. З.Зб) и называемых сигнгиами-
координатами или К-сигнг1лами. Поскольку всякий 0-сигнал, как и К-
Рис. 3.3
сигнал, имеет физический носитель, то ясно, что различие между О-
и К-сигналами условное и предопределяется интерпретацией участия
сигнала в локальном преобразовании у = Pi(n, х) = Р2{х, /i) (рис. 3.4).
В первом случае (рис. 3.4а) преобразуется сигнал х, а сигнал /i опре-
Г
Pi
1
Рис. 3.4
деляет оператор преобразования. Во втором случае (рис. 3.46) все с
точностью до наоборот. Таким образом. О- и К-сигналы образуют
общую совокупность переменных состояния нелинейной системы, и
поэтому удобно ввести преобразователи подобия, действия которых
можно полностью уяснить из анализа рис. 3.5. Введенная типизация
б
Рис. 3.5
сигналов естественным образом влечет типизацию основных струк-
турных элементов системы автоматического управления.
3.2.2.
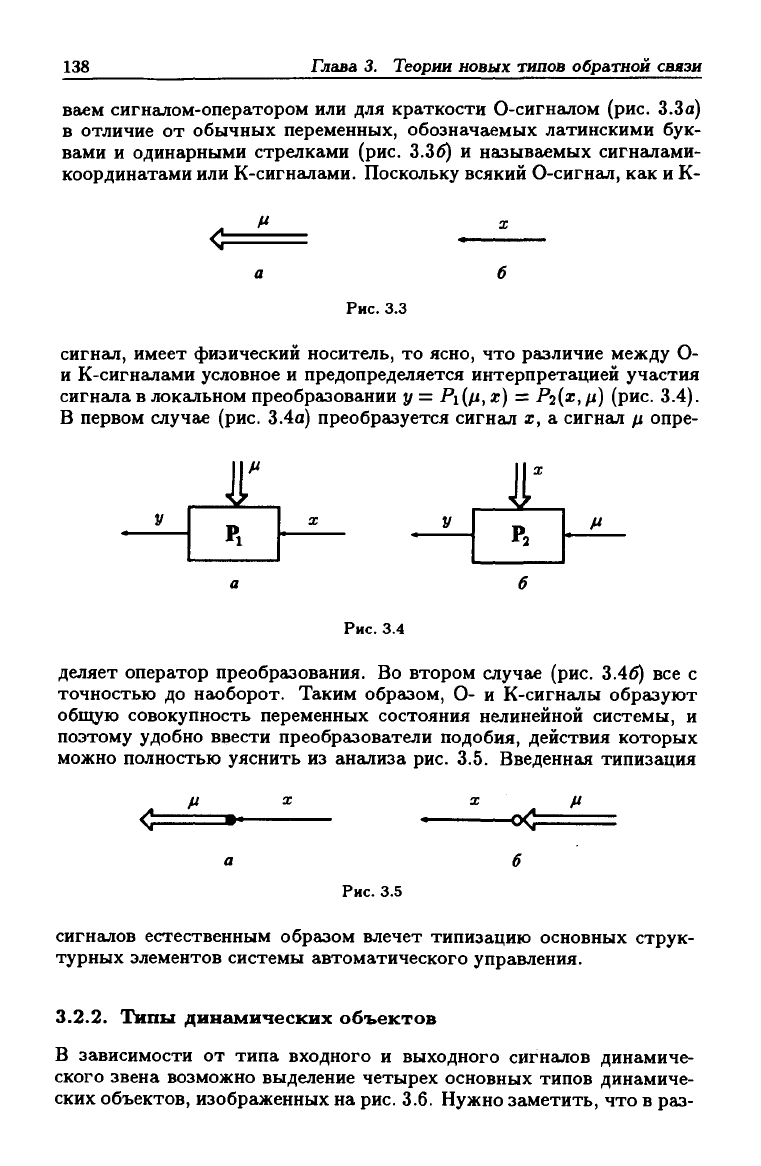
Типы динамических объектов
В зависимости от типа входного и выходного сигнгиюв динамиче-
ского звена возможно выделение четырех основных типов динамиче-
ских объектов, изображенных на рис. 3.6. Нужно заметить, что в раз-
3.2.
Система
базовых понятий
139
личных дисциплинах объекты подобных типов используются давно,
однако клги:сификация их по указанным выше признакам не проводи-
К
О
ко ок d
Рис.
3.6
лась.
Приведем лишь некоторые примеры объектов разных типов:
К-объект: стандартный колебательный радиоконтур, преобразую-
щий входные напряжения в выходные;
О-объект: колебательный контур с вариконом, преобразующий ем-
кость контура в частоту колебаний;
КО-объект: стандартный колебательный контур, вход — напряже-
ние,
выход — характеристика;
ОК-объект: устанавливает связь между параметрами колебатель-
ного контура и выходным напряжением.
3.2.3.
Бинарная операция
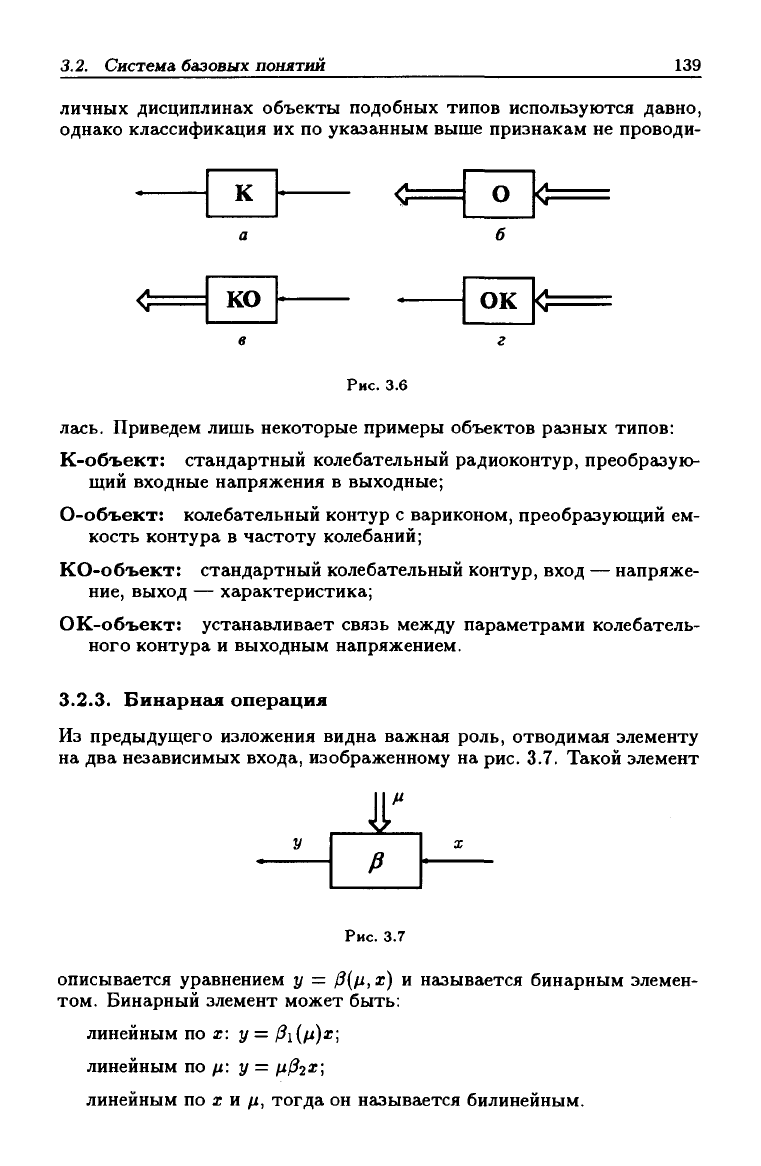
Из предыдущего изложения видна важная роль, отводимая элементу
на два независимых входа, изображенному на рис. 3.7. Такой элемент
К.
р
Рис. 3.7
описывается уравнением у = /?(^, х) и называется бинарным элемен-
том. Бинарный элемент может быть:
линейным по х: у = ;3i(/i)x;
линейным по /х: у = ц02х;
линейным по Z и /i, тогда он называется билинейным.
140 Глава 3. Теории новых
типов обратной
связи
Простейший билинейный элемент — множитель с масштабирова-
нием, описываемый уравнением
у ~ к fix.
Бинарный элемент называется сепарабельным, если
Бинарный элемент обобщгьет понятия релейного элемента и V'-ячейки.
Так, релейный элемент можно получить из бинарного при fi = const,
а ^/'-ячейку — при /?i = sgn fi, /32{x) > 0.
3.2.4.
Типы регулирующих органов
Элемент системы управления, выходная переменная которого оказы-
вает непосредственное влияние на вход объекта, называется регул'и-
рующим органом. Регулирующие органы бывают статическими и ди-
намическими.
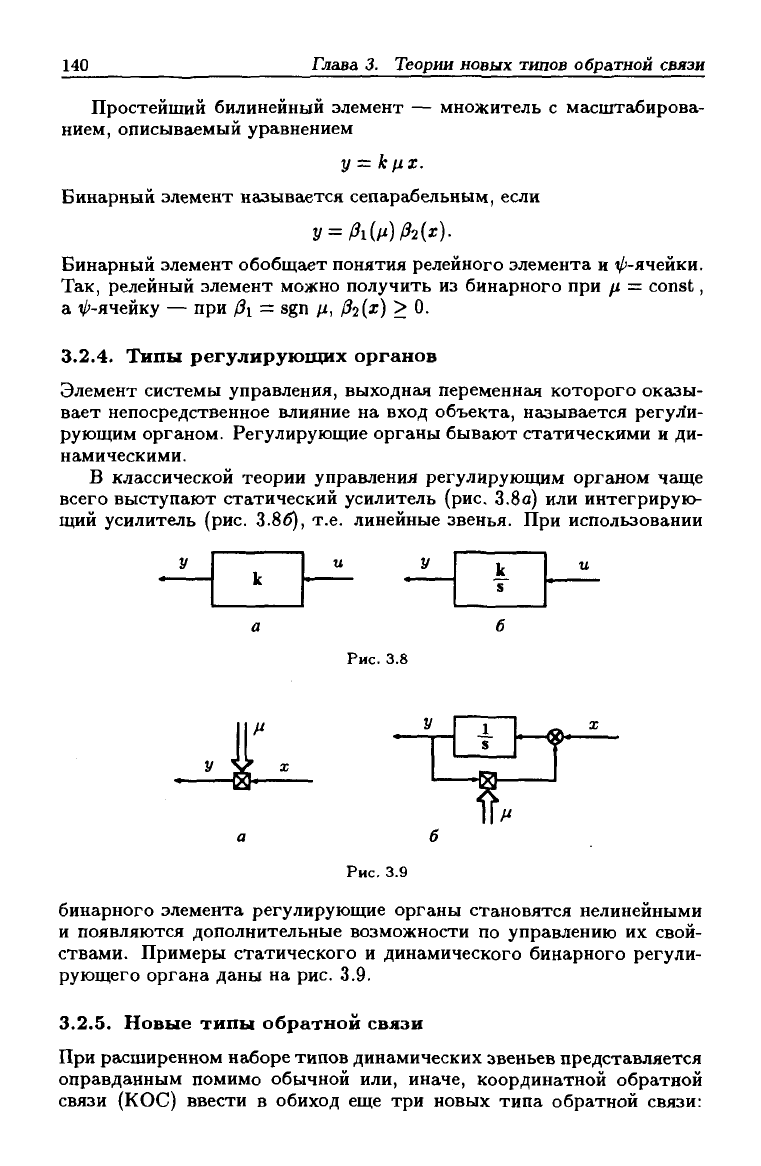
В классической теории управления регулирующим органом чаще
всего выступают статический усилитель (рис. 3.8а) или интегрирую-
щий усилитель (рис. 3.86), т.е. линейные звенья. При использовании
Рис. 3.8
«h.
Рис. 3.9
бинарного элемента регулирующие органы становятся нелинейными
и появляются дополнительные возможности по управлению их свой-
ствами. Примеры статического и динамического бинарного регули-
рующего органа даны на рис. 3.9.
3.2.5. Новые типы обратной связи
При расширенном наборе типов динамических звеньев представляется
оправданным помимо обычной или, иначе, координатной обратной
связи (КОС) ввести в обиход еще три новых типа обратной связи: