Емельянов С.В. Новые типы обратной связи
Подождите немного. Документ загружается.

2.3.
Стабилизация
регулятором переменной
структуры
111
характеристического полинома замкнутой системы
a(s)S'(s)s'"+^-\-k'y{s)
(2.46)
требуется выполнение неравенства deg f{8) > m + 1. Если полином
(2.46) гурвицев, то система слежения без ошибки воспроизводит по-
линомиальный сигнал (2.45), и тогда говорят, что регулятор
R{8)
fis)
'+1
S'{s)
(2.47)
обеспечивает астатизм (m + 1)-го порядка. Заметим, что, в силу из-
вестного разложения экспоненты
»а«
=
Е
{atr
г!
т=0
задачу слежения за экспоненциально растущим сигналом
y'{t)
= y4oy
можно интерпретировать как задачу построения системы с бесконеч-
ным порядком астатизма.
Ясно,
что указанным выше способом построить такую систему
слежения нельзя из-за неограниченно возрастающей сложности регу-
лятора. Это наблюдение только подтверждает сделанный ранее вывод
о том, что
• в рамках линейной теории невозможно построение робастной аста-
тической следящей системы.
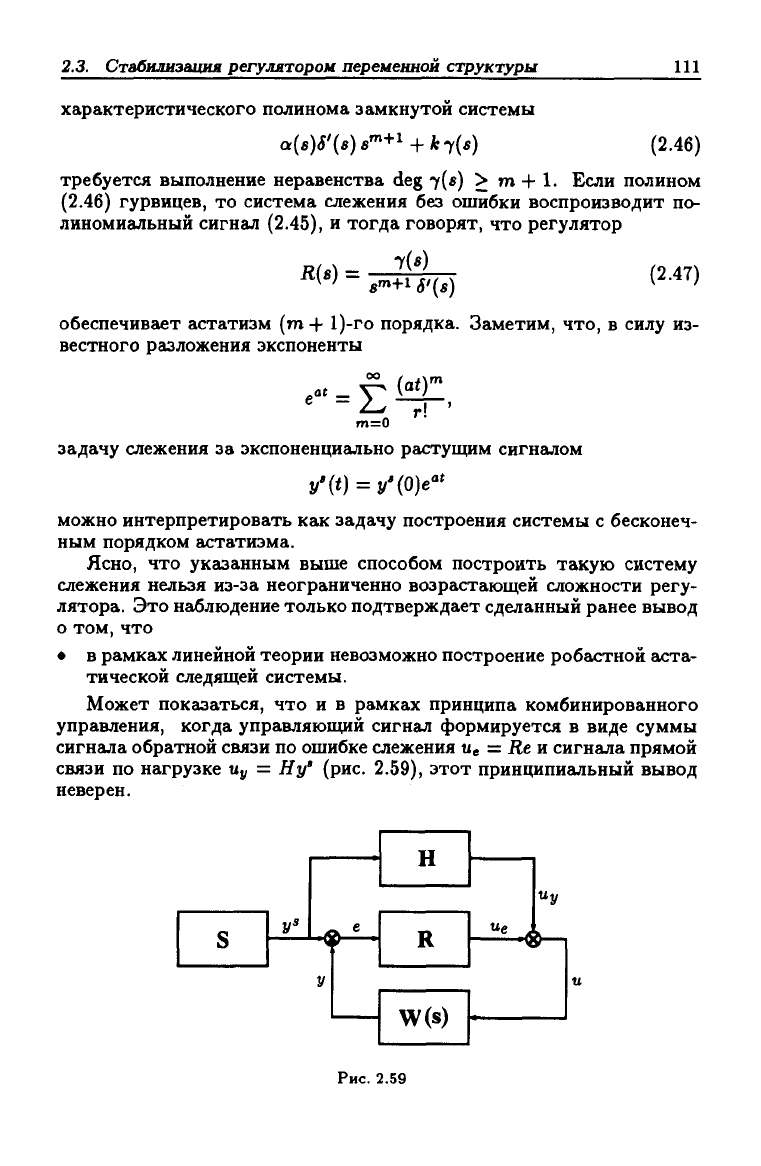
Может показаться, что и в рамках принципа комбинированного
управления, когда управляющий сигнал формируется в виде суммы
сигнала обратной связи по ошибке слежения и^ = Ле и сигнала прямой
связи по нагрузке Uy = Ну' (рис. 2.59), этот принципиальный вывод
неверен.
S
У^
^ «
у
Рис. '
н
R
W(s)
2.59
ue
J
"Ч
Uy
>—1
112 Глава 2.
Некоторые
принципы
построения
нелинейных регуляторов
Разберем и эту ситуацию, полагая, как и ранее, что W{s) ~ l/a(s),
R[s) = j{s)/5{s). Из рис. 2.59 имеем следующее уравнение движения
относительно ошибки:
a{s) е
—
a{s) у'
—
и
= [a{8)-H{s)]y'-R{s)e.
u=Hy'+Re
После приведения подобных имеем дело с уравнением
[ais)S{s)+y{s)]e = S{s)[a(s) - H{s)]y'. (2.48)
В (2.48) оператор прямой связи H{s) надлежит выбрать так, чтобы
правая часть обратилась в тождественный нуль. Имеется несколько
очевидных возможностей решения этой задачи.
Способ I. Можно, например, положить
H{s) = a{s),
тогда прямая связь определяется выражением
«у = a(s) у'
и предполагает п-кратное точное дифференцирование задающего сиг-
нала (напомним, что deg a(s) = п). По неоднократно приводившимся
выше соображениям от этого решения, как неробастного, приходится
отказываться.
Способ П. Можно понизить кратность дифференцироваЦия вос-
производимого сигнала
y'(t),
если
deg /C(s) < deg a{s),
где K.{s) — оператор, аннулирующий
y'[t).
В самом деле, поделим по-
лином a{s) на IC(s), так как, вообще говоря, все нули tC{s) не являются
нулями
oi{s).
В результате деления получится некий остаток y{s), т.е.
a{s) = a'{s)ICis) + T,is), (2.49)
причем справедливы неравенства
deg y{s) < deg
K-{s)
< deg a{s).
Теперь для достижения г1статизма достаточно (при том условии, что
характеристический полином (p(s) = a(s) J(s) + j(s) — гурвицев) по-
ложить
H(s) = ф). (2.50)
Подставляя (2.50) в (2.49), а результат — в (2.48), получаем уравнение
[а{8) Sis) + f(s) ] е = 5(8) [e'(s)
IC{s)
+ ф) - n{s) ]у'=0,
из которого и следует сказанное выше.
2.3.
Стабилизация регулятором переменной структуры
113
Способ III. Если же
deg K.{s) > deg a{s)
и у оператора K{s) есть устойчивые нули, т.е. он представим в виде
IC{s) = lC-{s)K+{s),
где /C_(s) — гурвицев полином, то эти нули можно включить в число
нулей полинома S(s), т.е. взять последний в виде
S(s)^S'(s)IC-{s).
Если при этом еще окажется, что
deg lC+{s) <deg a(s),
то возможен синтез оператора прямой связи H{s) по той же схеме, что
и в Способе II. При невыполнении последнего неравенства использо-
вание прямой связи по нагрузке кардинальным образом не влияет на
возможность построения астатической следящей системы.
Из приведенного выше анализа следует, что в любом случае потре-
буется операция точного многократного дифференцирования, что не
позволяет говорить о решении рассматриваемой задачи.
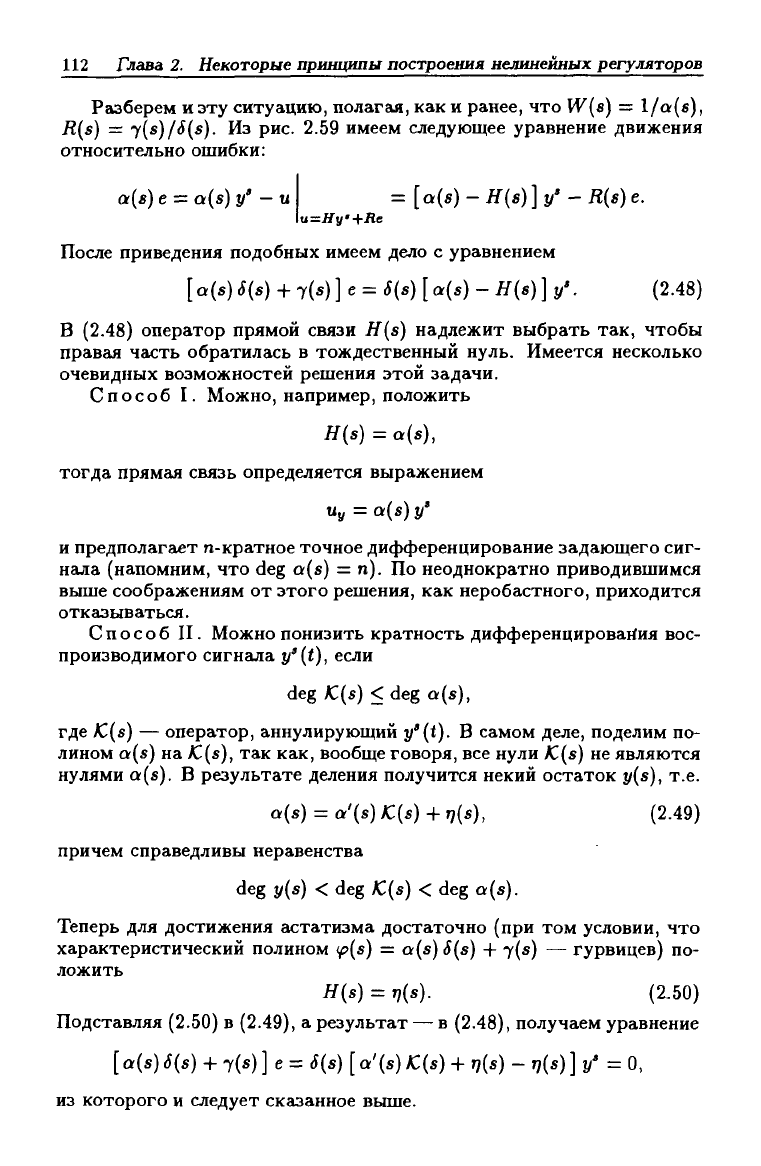
Пример 14. Точное слежение за задающим воздействием. Про-
иллюстрируем теоретические выкладки предыдущего раздела на простей-
шем примере и рассмотрим следующую постановку задачи: требуется син-
тезировать обратную связь, обеспечивающую точное слежение регулируе-
мой координатой у за задающим воздействием у' (рис. 2.60). Уравнение
S
.6
•V
У
е
J
'
R
1
S
Рис.
2.60
системы слежения относительно ошибки е таково: ё = у'
то задачу решает любг1я обратная связь вида
и = ке, к = const > О,
и. Если у' = О,
так как в этом случае уравнение замкнутой системы ё — —ке экспонен-
щ1ально устойчиво. Если же у' ^ О, нашример у' = const (т.е. задание
растет линейно), то статическая обратная связь и = ке уже не решает за-
дачу, так как уравнение движения в отклонениях имеет ненулевую правую
114 Глава 2.
Некоторые
прииципы
построения
нелинейных регуляторов
часть
в положении равновесия ё =
—ке
+ у', и, следовательно, появляется
статииеская ошибка, т.е. установившееся при t
—>
оо значение ошибки регу-
лирования е(оо) = у'/к. Разумеется, увеличением коэффициента усиления
обратной связи к эту погрешность слежения можно устранить, но при этом
возникают характерные для систем с глубокой обратной связью проблемы,
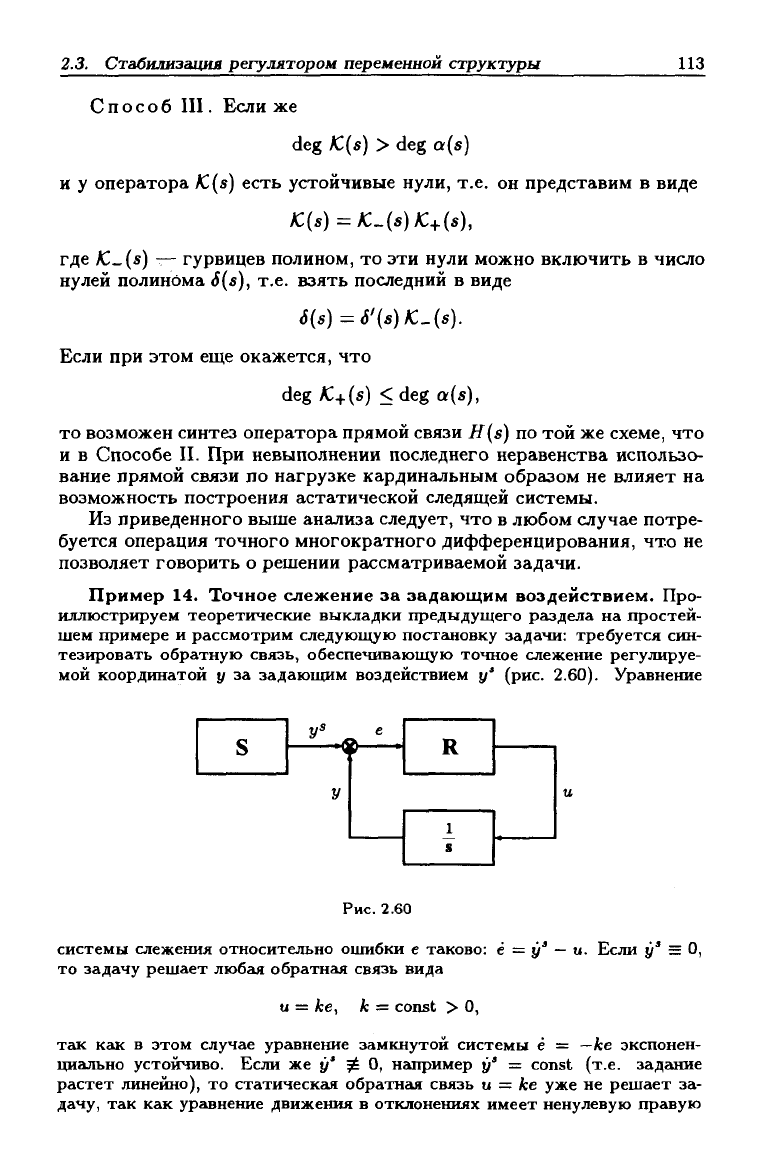
о которых говорилось в главе 1. Если в системе на рис. 2.60 дополнительно
использовать прямую связь по нагрузке, т.е. сформировать управление в
виде суммы
U
= ке + у', то получится астатическая следящая система со
структурной схемой, приведенной на
рис.
2.61, и уравнением движения вида
ё = —ite. Последнее асимптотически устойчиво при
А;
> О, что и решает
рассматриваемую задачу.
S
yS
у
f^
S
к
1
S
"«<L
Uy
'W
Рис.
2.61
Иными словами, построена астатическгш комбинированнгья следящая си-
стема, в которой для достижения астатизма необходимо использовать опе-
рацию точного дифференцирования, и это в таком тривиальном случг^е!
В этой связи естественным представляется следующий вопрос:
• нельзя ли обеспечить астатизм (нулевую установившуюся ошибку)
при ограниченных коэффициентах регулирования и без использо-
вания операции точного дифференцирования?
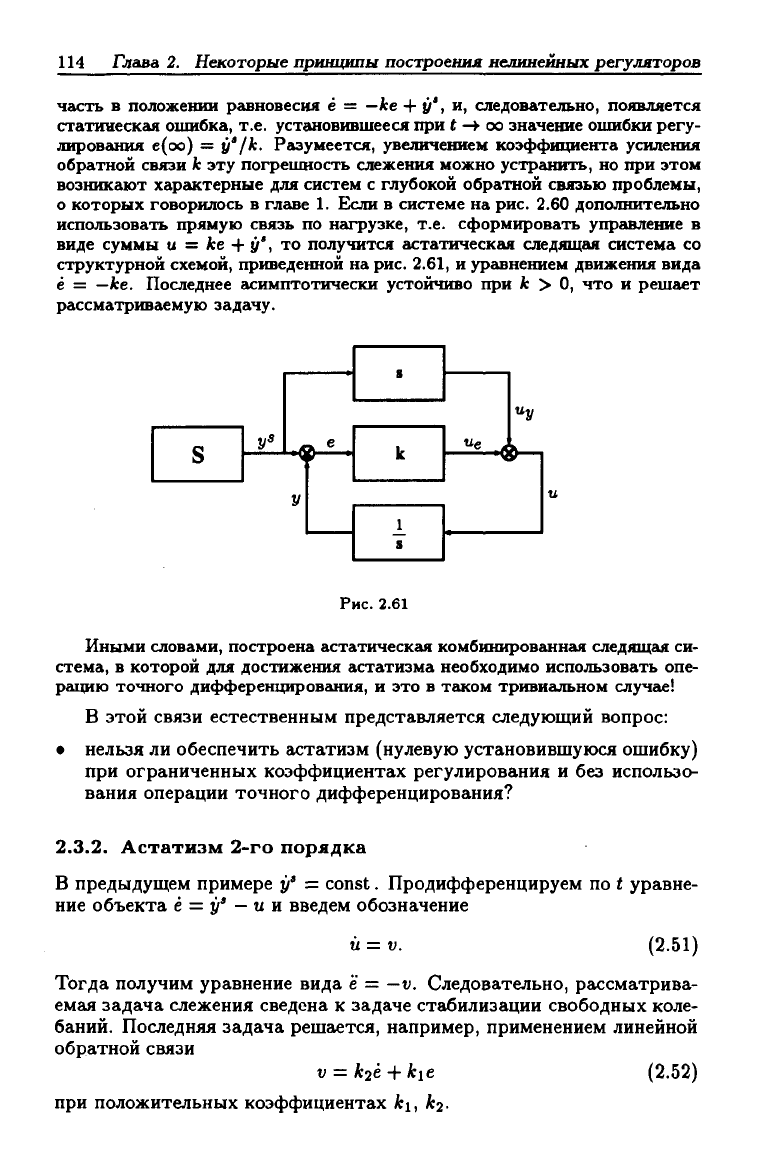
2.3.2.
Астатизм 2-го порядка
В предыдущем примере у' = const. Продифференцируем по t уравне-
ние объекта ё = у'
—
и и введем обозначение
и = V.
(2.51)
Тогда получим уравнение вида ё = —v. Следовательно, рассматрива-
емая задача слежения сведена к задаче стг^билизации свободных коле-
баний. Последняя задача решается, например, применением линейной
обратной связи
v = k2e + kie (2.52)
при положительных коэффициентах ki, к^-
2.3.
Стабилизация
регулятором переменной
структуры
115
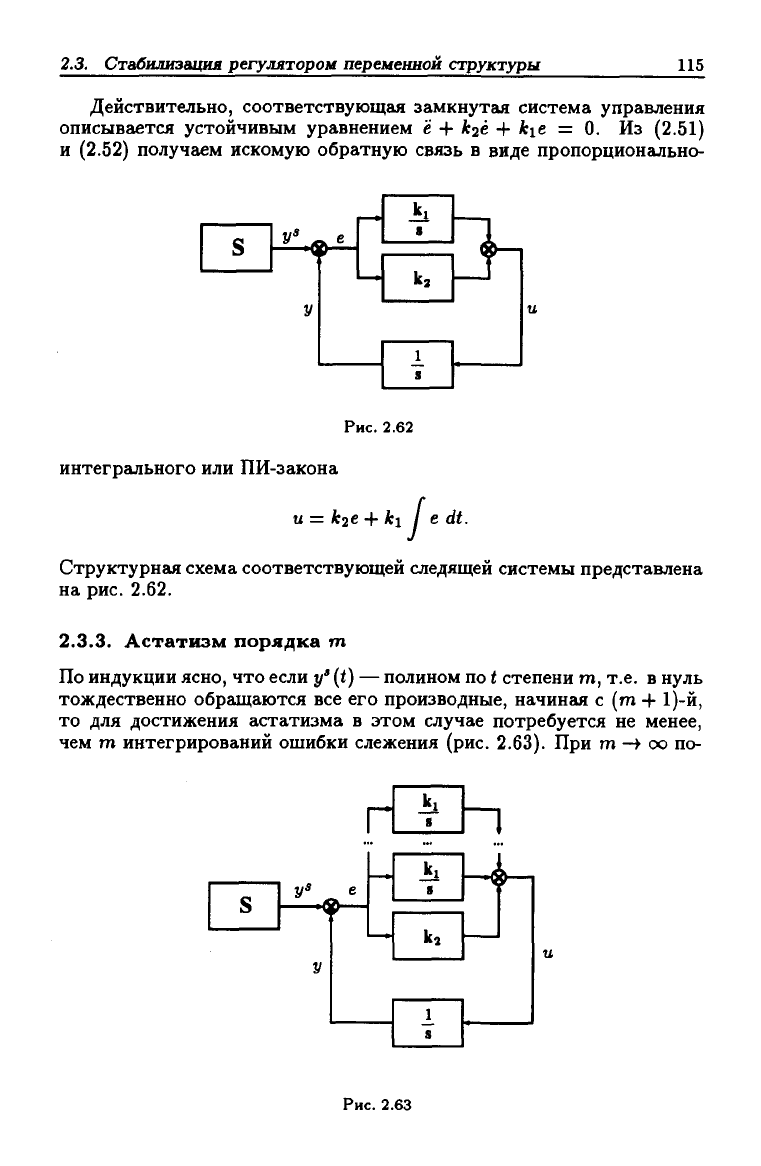
Действительно, соответствующая замкнутая система управления
описывается устойчивым уравнением ё + Лгё + kie = 0. Из (2.51)
и (2.52) получг^м искомую обратную связь в виде пропорционально-
S ^
у
1—
к, —1
1
я
Рис.
2.62
интегрального или ПИ-закона
и = Лгс + ki I е dt.
Структурная схема соответствующей следящей системы представлена
на рис. 2.62.
2.3.3.
Астатизм порядка т
По индукции ясно, что если у' (t) — полином по t степени т, т.е. в нуль
тождественно обращаются все его производные, начиная с (т + 1)-й,
то для достижения астатизма в этом случае потребуется не менее,
чем m интегрирований ошибки слежения (рис. 2.63). При m
—>
оо по-
ki
S
yS
,6
у
е
У-
S
кг
1
S
^ ,
Рис.
2.63
116 Глава 2. Некоторые принципы построения нелинейных регуляторов
рядок линейного регулятора растет до бесконечности, что, конечно,
практически неприемлемо. В частности, таким путем нельзя постро-
ить астатическую систему для экспоненциально растущего задания
у'
= е"', а = const > О, так как
="
=
Е
иг
т!
и для этого по указанной методике потребуется использование беско-
нечномерного регулятора. Как же быть?
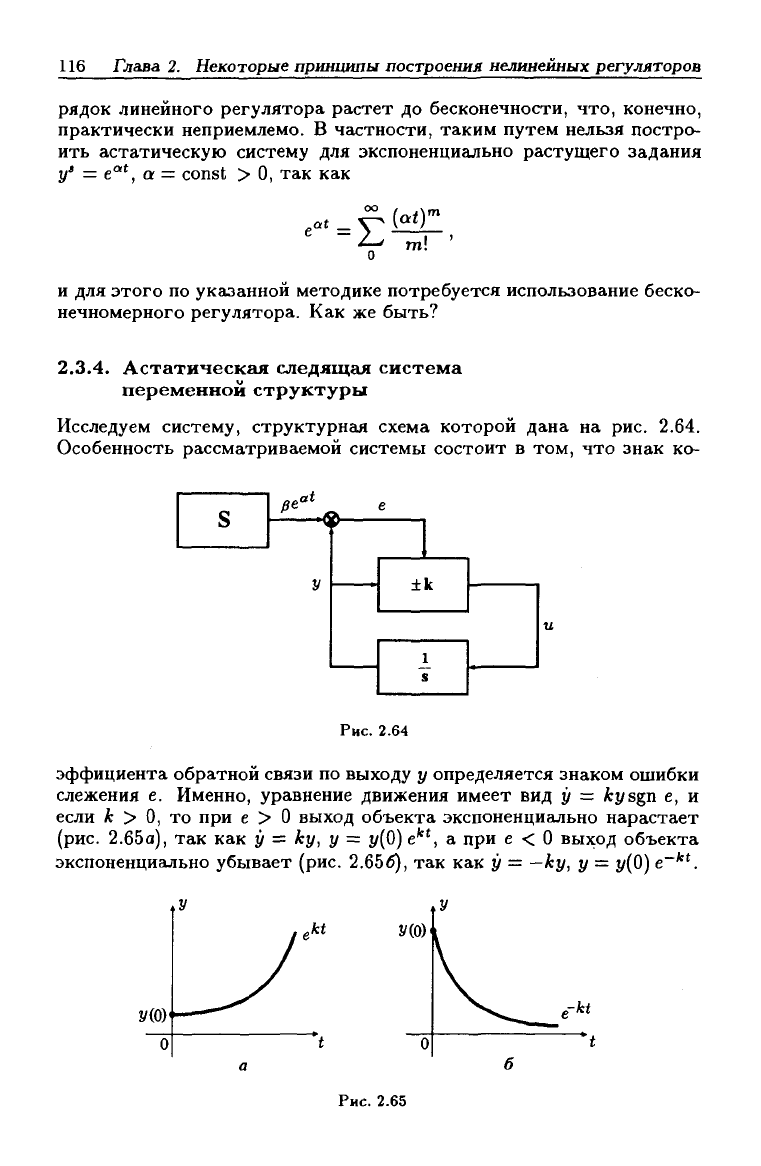
2.3.4. Астатическая следящгкя система
переменной структуры
Исследуем систему, структурная схема которой дана на рис. 2.64.
Особенность рассматриваемой системы состоит в том, что знак ко-
S
,e^'^
"V
У
>
е
1
Рис.
±к
1
S
2.64
эффициента обратной связи по выходу у определяется знаком ошибки
слежения е. Именно, уравнение движения имеет вид у = ку sgn е, и
если ^ > О, то при е >
О
выход объекта экспоненцигшьно нарастает
(рис.
2.65а), так как у
=^
ку, у = у(0)е*', а при е <
О
выход объекта
экспоненциально убывает (рис. 2.656), так как у = —ку, у = у(0) е~**.
У(0)'
0
.у
н
't
Рис.
2.65
2.3.
Стабилизация регулятором переменной структуры
117
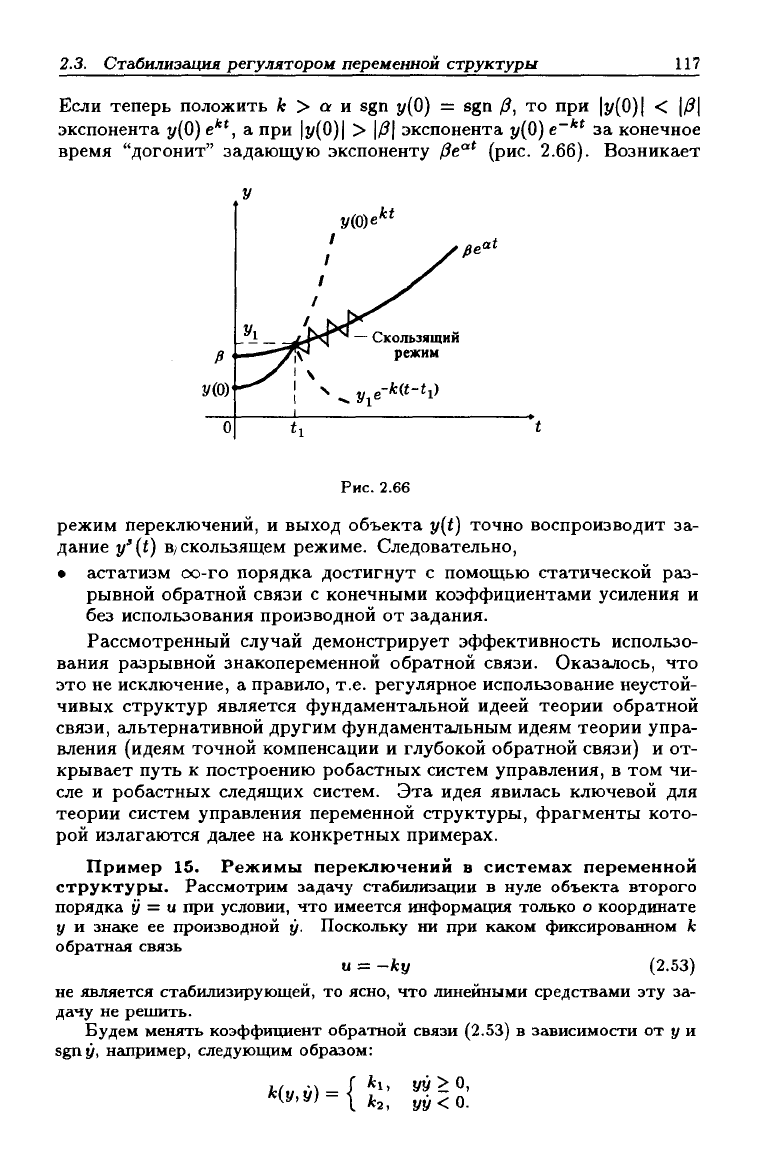
Если теперь положить к > а и sgn j/(0) = sgn /?, то при |j/(0)| < (/?|
экспонента j/(0) е**, а при |j/(0)| > |/?| экспонента у(0) е~*' за конечное
время "догонит" задающую экспоненту
/Зе"*^
(рис. 2.66). Возникает
fi
У(0)
0
I/
_^J_
у(0)е'='
1 ^/^
-^Jr^C^
—
Скользящий
Tlv^ режим
1
Ч
1 ^ ^ y^e-^^W-*!)
h
Рис.
2.66
режим переключений, и выход объекта y[t) точно воспроизводит за-
дание y'{t)
By
скользящем режиме. Следовательно,
• астатиэм оо-го порядка достигнут с помощью статической раз-
рывной обратной связи с конечными коэффициентами усиления и
без использования производной от задания.
Рассмотренный случай демонстрирует эффективность использо-
вания разрывной знакопеременной обратной связи. Оказалось, что
это не исключение, а правило, т.е. регулярное использование неустой-
чивых структур является фундаментальной идеей теории обратной
связи, альтернативной другим фундаментгшьным идеям теории упра-
вления (идеям точной компенсации и глубокой обратной связи) и от-
крывает путь к построению робастных систем управления, в том чи-
сле и робастных следящих систем. Эта идея явилась ключевой для
теории систем управления переменной структуры, фрагменты кото-
рой излагаются далее на конкретных примерах.
Пример 15. Режимы переключений в системах переменной
структуры. Рассмотрим задачу стабилизации в нуле объекта второго
порядка у = и при условии, что имеется информация только о координате
у и знаке ее производной у. Поскольку ни при кгжом фиксированном к
обратная связь
U
= -ку (2.53)
не является стабилизирующей, то ясно, что линейными средствами эту за-
дачу не решить.
Будем менять коэффициент обратной связи (2.53) в зависимости от у и
sgn у, например, следующим образом:
к(у,у) =
{
ки
*2,
УУ>0,
УУ<0.
118 Глава 2. Некоторые принципы построения нелинейных регуляторов
Тогда замкнутая система упргшления имеет разрывную обратную связь
и описывгкется уравнением
у = -к{у,у)у.
(2.54)
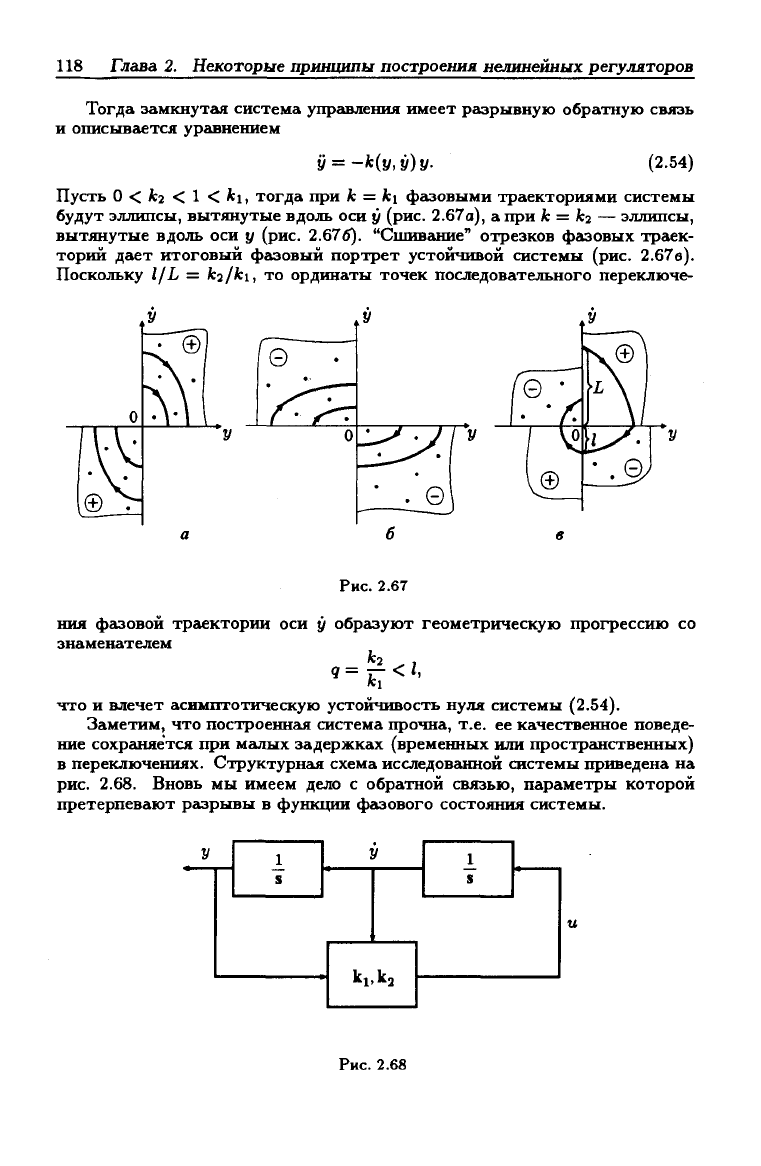
Пусть О < к2 < 1 < ki, тогда при к = ki фазовыми траекториями системы
будут эллипсы, вытянутые вдоль оси у (рис. 2.67а), а при к = к2 — эллипсы,
вытянутые вдоль оси у (рис. 2.676). "Сшивание" отрезков фазовых трг1ек-
торий дг1ет итоговый фг13овый портрет устойчивой системы (рис. 2.67в).
Поскольку 1/L = /cj/fci, то ординаты точек последовательного переключе-
е
^•?г
V
U
_
К®)
V
1^
•
• .^
Рис.
2.67
ния фазовой траектории оси у образуют геометрическую прогрессию со
знаменателем
ki ,
что и влечет асимптотическую устойчивость нуля системы (2.54).
Заметим, что построенная система прочна, т.е. ее качественное поведе-
ние сохраняется при малых задержках (временных или пространственных)
в переключениях. Структурнгш схема исследованной системы приведена на
рис.
2.68. Вновь мы имеем дело с обратной связью, параметры которой
претерпевают разрывы в функции фазового состояния системы.
У
1
S
У
kl.kj
Рис. 2.68
1
S
2.3.
Стабилизация регулятором переменной структуры 119
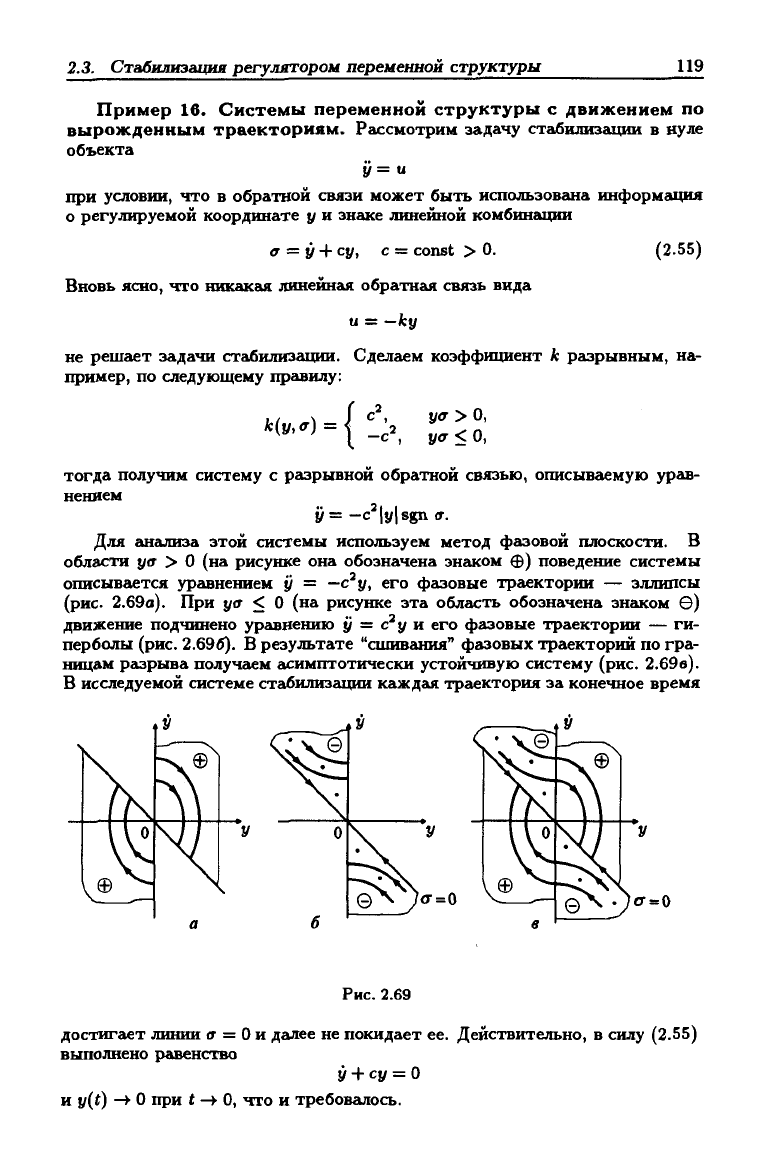
Пример 1в. Системы переменной структуры с движением по
вырожденным траекториям. Рассмотрим задачу стабилизации в нуле
объекта
у=и
при условии, что в обратной связи может быть использована информация
о регулируемой координате у и знаке линейной комбинации
(Г = у + су, с = const > 0. (2.55)
Вновь ясно, что никакгш линейнгья обратная связь вида
U
= -ку
не решсъет задачи стабилизации. Сделгъем коэффициент к разрывным, на-
пример, по следующему пргшилу:
I
/ \ / с^. ус^ > О,
тогда получим систему с разрывной обратной связью, описываемую ургш-
нением
У= -c^|y|sgn а.
Для анализа этой системы используем метод фазовой плоскости. В
области ytr > О (на рисунке она обозначена знаком ф) поведение системы
описывается уравнением у = —с'у, его фазовые траектории — эллипсы
(рис.
2.69а). При у<т < О (на рисунке эта область обозначена знаком G)
движение подчинено уравнению у = с*у и его фазовые траектории — ги-
перболы (рис. 2.696). В результате "сшивания" фазовых траекторий по гра-
ницам разрыва получгьем асимптотически устойчивую систему (рис. 2.69в).
В исследуемой системе стсъбилизации каждая тргъектория за конечное время
сг=0
Рис.
2.69
достигает линии
<г
=
О
и далее не покидает ее. Действительно, в силу (2.55)
выполнено равенство
у
-1-
су =
О
и y(t)
—> О
при t
—>
О, что и требовалось.
120 Глава 2.
Некоторые
принципы
построения
нелинейных регуляторов
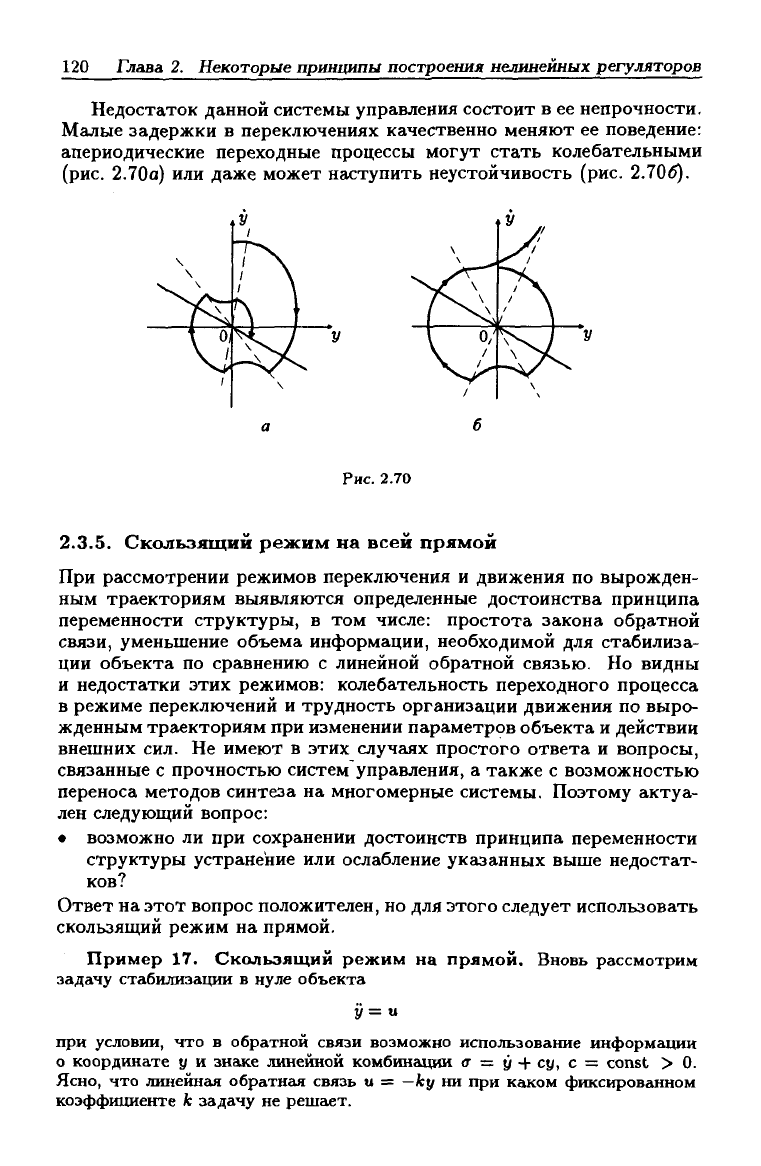
Недостаток данной системы управления состоит в ее непрочности.
Малые задержки в переключениях качественно меняют ее поведение:
апериодические переходные процессы могут стать колебательными
(рис.
2.70а) или даже может наступить неустойчивость (рис. 2.706).
\
\
s^^ \
0,
/
;
1
1
1
1
\
ч
;
Рис. 2.70
2.3.5. Скользящий режим на всей прямой
При рассмотрении режимов переключения и движения по вырожден-
ным траекториям выявляются определенные достоинства принципа
переменности структуры, в том числе: простота закона обратной
связи, уменьшение объема информации, необходимой для стабилиза-
ции объекта по сравнению с линейной обратной связью. Но видны
и недостатки этих режимов: колебательность переходного процесса
в режиме переключений и трудность организации движения по выро-
жденным траекториям при изменении параметров объекта и действии
внешних сил. Не имеют в этих случаях простого ответа и вопросы,
связанные с прочностью систем управления, а также с возможностью
переноса методов синтеза на многомерные системы. Поэтому актуа-
лен следующий вопрос:
• возможно ли при сохранении достоинств принципа переменности
структуры устранение или ослабление указанных выше недостат-
ков?
Ответ на этот вопрос положителен, но для этого следует использовать
скользящий режим на прямой.
Пример 17. Скользящий режим на прямой. Вновь рассмотрим
задачу стабилизации в нуле объекта
у = и
при условии, что в обратной связи возможно использование информации
о координате у и знаке линейной комбинации <т = у -)- су, с = const > 0.
Ясно,
что линейнс1я обратная связь и = —ку ни при каком фиксированном
коэффшдаенте к задачу не решает.