Емельянов С.В. Новые типы обратной связи
Подождите немного. Документ загружается.

3.3.
Структурный синтез
бинарных
систем
141
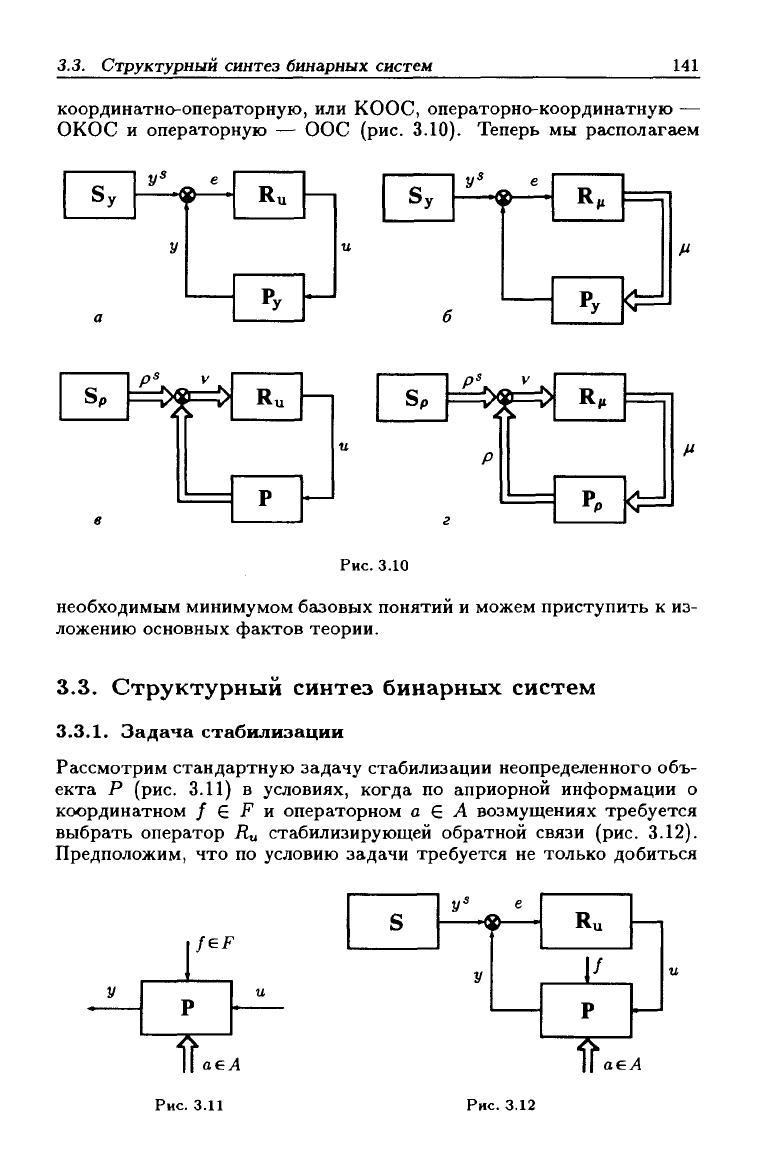
координатно-операторную, или КООС, операторно-координатную —
ОКОС и операторную — ООС (рис. 3.10). Теперь мы располагаем
Sy
а
У^ е
iff*
У
Ru
iV
и
Sy
у'
"i
б
е
9
•
R,
I'y
0=0
в
Р=^ Ru -^
i=|
Р kJ
Sp
[=c>5f=J>|
RM |=|]
u
p
г
P. Ф=^
Рис.
3.10
необходимым минимумом базовых понятий и можем приступить к из-
ложению основных фактов теории.
3.3.
Структурный синтез бинарных систем
3.3.1.
Задача стабилизации
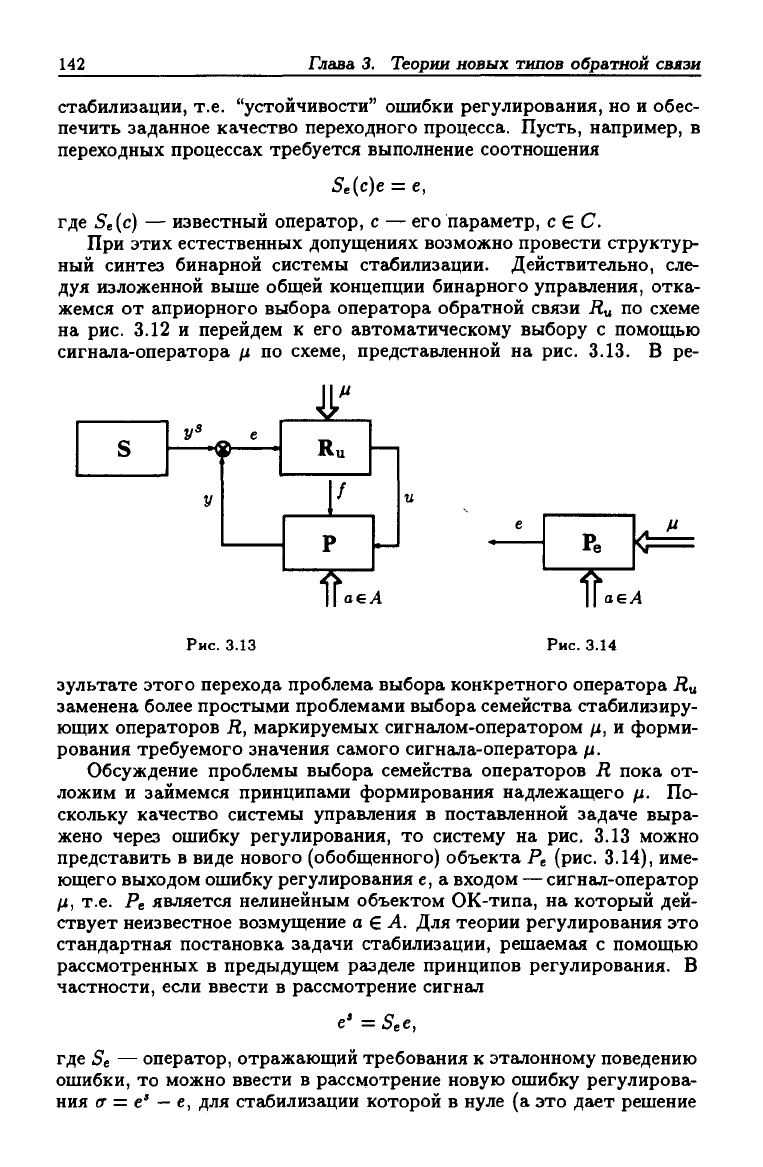
Рассмотрим стандартную задачу стабилизации неопределенного объ-
екта Р (рис. 3.11) в условиях, когда по априорной информации о
координатном / G F и операторном а € А возмущениях требуется
выбрать оператор Лц стабилизирующей обратной связи (рис. 3.12).
Предположим, что по условию задачи требуется не только добиться
fsF
Р
S
у'
У
е
i '
Ru
К
р
leA
Рис.
3.11
Рис.
3.12
т.
еЛ
142
Глава 3. Теории новых
типов обратной
связи
стабилизации, т.е. "устойчивости" ошибки регулирования, но и обес-
печить заданное качество переходного процесса. Пусть, например, в
переходных процессах требуется выполнение соотношения
Se{c)e = е,
где Se{c) — известный оператор, с — его параметр, с Е С.
При этих естественных допущениях возможно провести структур-
ный синтез бинарной системы стабилизации. Действительно, сле-
дуя изложенной выше общей концепции бинарного управления, отка-
жемся от априорного выбора оператора обратной связи Лц по схеме
на рис. 3.12 и перейдем к его автоматическому выбору с помощью
сигнала-оператора /х по схеме, представленной на рис. 3.13. В ре-
1
S
у'
'V
у
е
7^ •
Р
'
Рис.
3.13
Ru
/
Р
1
foe
и
е
А
Ре
^
\\asA
Рис.
3.14
зультате этого перехода проблема выбора конкретного оператора Дц
заменена более простыми проблемами выбора семейства стабилизиру-
ющих операторов R, маркируемых сигналом-оператором f^, и форми-
рования требуемого значения самого сигнала-оператора /х.
Обсуждение проблемы выбора семейства операторов R пока от-
ложим и займемся принципами формирования надлежащего /л. По-
скольку качество системы управления в поставленной задаче выра-
жено через ошибку регулирования, то систему на рис. 3.13 можно
представить в виде нового (обобщенного) объекта Ре (рис. 3.14), име-
ющего выходом ошибку регулирования е, а входом — сигнал-оператор
fi, т.е. Ре является нелинейным объектом ОК-типа, на который дей-
ствует неизвестное возмущение а Е А. Для теории регулирования это
стандартная постановка задачи стабилизации, решаемая с помощью
рассмотренных в предыдущем разделе принципов регулирования. В
частности, если ввести в рассмотрение сигнал
е' =See,
где Se — оператор, отражающий требования к эталонному поведению
ошибки, то можно ввести в рЕ1Ссмотрение новую ошибку регулирова-
ния
<т
= е'
—
е, для стабилизации которой в нуле (а это дает решение
3.3.
Структурный синтез
бинарных
систем
143
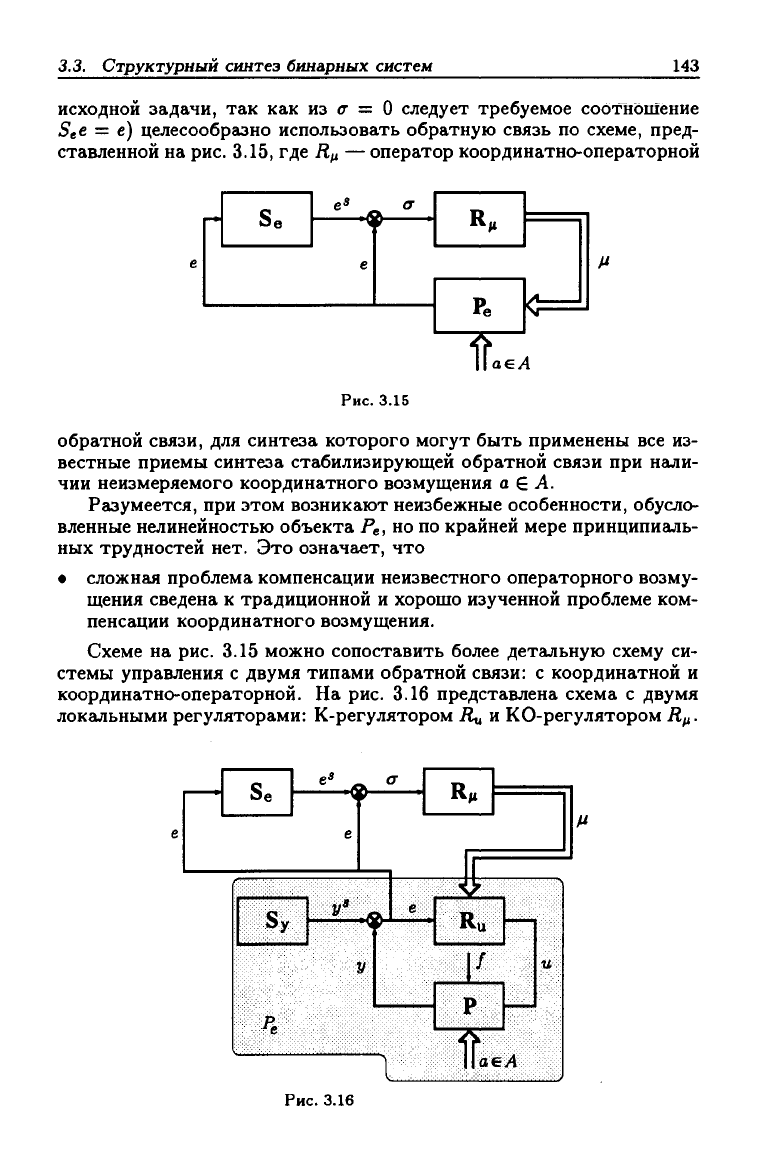
исходной задачи, так как из сг = О следует требуемое соотношение
See = е) целесообразно использовать обратную связь по схеме, пред-
ставленной на рис. 3.15, где Д^^ — оператор координатно-операторнои
Se
'\б^
<т
е
R,
Ре
/* '
*^ '
1
аеА
Рис.
3.15
обратной связи, для синтеза которого могут быть применены все из-
вестные приемы синтеза стабилизирующей обратной связи при нгши-
чии неизмеряемого координатного возмущения а £ А.
Разумеется, при этом возникают неизбежные особенности, обусло-
вленные нелинейностью объекта Ре, но по крайней мере принципиаль-
ных трудностей нет. Это означает, что
• сложная проблема компенсации неизвестного операторного возму-
щения сведена к традиционной и хорошо изученной проблеме ком-
пенсации координатного возмущения.
Схеме на рис. 3.15 можно сопоставить более детальную схему си-
стемы управления с двумя типами обратной связи: с координатной и
координатно-операторнои. На рис. 3.16 представлена схема с двумя
локальными регуляторами: К-регулятором Н^ и КО-регулятором Rf,.
Se -
'' St
——\9
e
j'
Sy
1Й
у
Ре
a
D
K»l •
V '
\
V
Ru
К
p
^
|a€
^
и
A
Рис.
3.16

144 Глава 3. Теории иовых
типов обратной
связи
Изложенный прием синтеза структуры регулятора можно трак-
товать как способ получения нелинейного регулятора R в схеме на
рис.
3.17, и, вообще говоря, априорно не очевидно, почему этот не-
линейный регулятор должен иметь именно такую структуру. В пре-
Ja
S
'' б>
у
<г
е
Se
^
Ru
а
/
р
г
R,
Я
R
и
€Л
Рис. 3.17
дыдущей схеме оператор 5е(с), определяющий эталонное свойство си-
стемы управления, зависит от параметра с, который часто задан неод-
нозначно, а только с точностью до принадлежности некоторому мно-
жеству С, т.е. с ^С- Естественно полагать, что, меняя параметр с в
пределах множества С, можно улучшить некоторые характеристики
системы.
Например, хорошо известно, что снижение коэффициентов усиле-
ния в обратной связи благоприятно сказывается на помехозащищен-
ности системы, уменьшает влияние ограничений и т.п. С другой сто-
роны, если в схеме на рис. 3.16 оператор Яц реализует статическую
бинарную операцию, т.е.
Им — кцх, с = const,
то 0-сигнал ц выполняет роль коэффициента передачи и потому дол-
жен быть ограничен, т.е. |/i| < 1.
Проанализируем теперь режим работы структуры на рис. 3.15, ко-
гда выполняется требуемое равенство
<т —
0. Последнее эквивалентно
двум равенствам
5е(с)е = е, e = Pe(a)fi.
При заданном параметре с из первого соотношения находим зависи-
мость е(с), а затем, из второго уравнения, — требуемое значение О-
сигнала
^ =
р-\а)е{с),
(3.1)
которое, естественно, зависит от неизвестного параметра а, и именно
поэтому его нельзя было вычислить по априорным данным.
3.3.
Структурный синтез
бинарных
систем
145
Второй вывод из (3.1) состоит в том, что когда параметр а ме-
няется в широких пределах, то пределы изменения сигнала /i также
должны быть достаточно большими, что может оказаться несовме-
стимым с ограничением
Ы < 1- (3.2)
Имеется одна принципиальная возможность выполнения равенства
(3.1) при соблюдении ограничения (3.2). Она, очевидно, связана с из-
менением параметра с € С в зависимости от 0-сигнала fi. Реализация
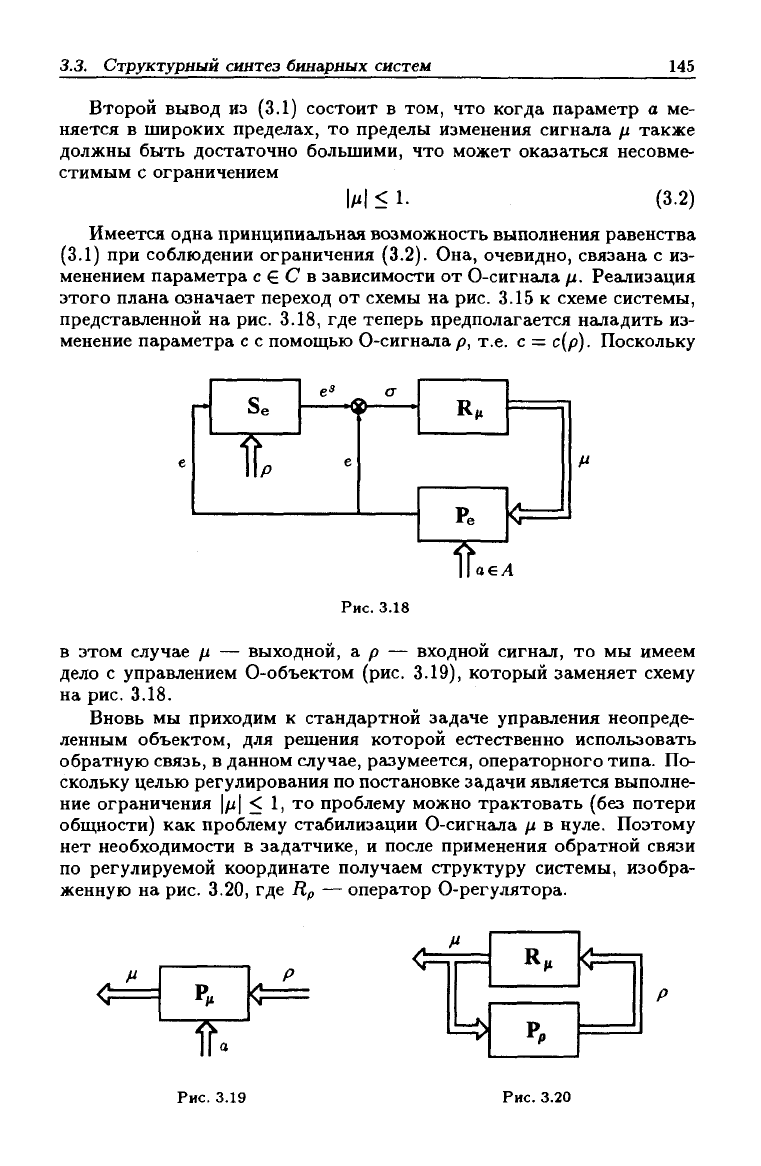
этого плана означает переход от схемы на рис. 3.15 к схеме системы,
представленной на рис. 3.18, где теперь предполагается наладить из-
менение параметра с с помощью 0-сигнала р, т.е. с = с{р). Поскольку
Г Se
1
е" а
•^
RM
¥ €/1
Рис.
3.18
в этом случае р. — выходной, а /> — входной сигнги, то мы имеем
дело с управлением 0-объектом (рис. 3.19), который заменяет схему
на рис. 3.18.
Вновь мы приходим к стандартной задаче управления неопреде-
ленным объектом, для решения которой естественно использовать
обратную связь, в данном случае, разумеется, операторного типа. По-
скольку целью регулирования по постановке задачи является выполне-
ние ограничения
\\х\
< 1, то проблему можно трактовать (без потери
общности) как проблему стабилизации 0-сигнала ^ в нуле. Поэтому
нет необходимости в задатчике, и после применения обратной связи
по регулируемой координате получаем структуру системы, изобра-
женную на рис. 3.20, где Rp — оператор 0-регулятора.
"1Г
^^
Кц (J
Ьф Р-
Рис.
3.19
Рис.
3.20
146
Глава 3. Теории новых
типов обратном
связи
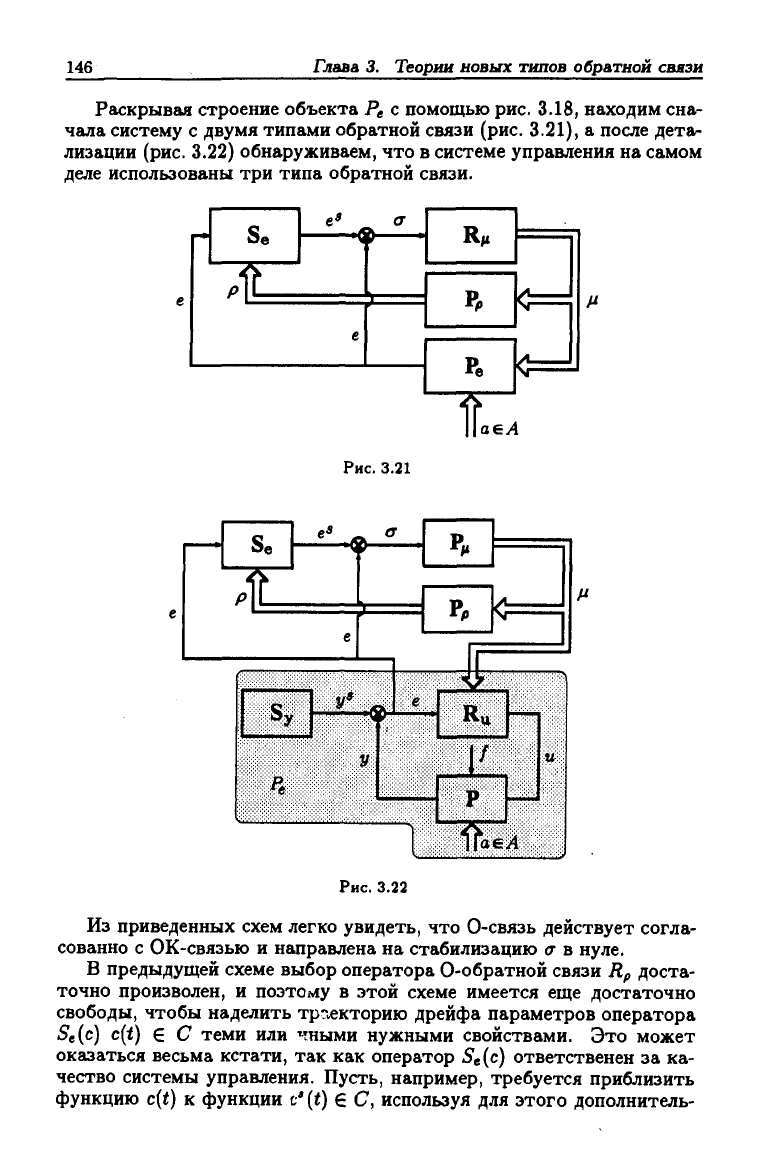
Раскрывая строение объекта Ре с помощью рис. 3.18, находим сна-
чала систему с двумя типами обратной связи (рис. 3.21), а после дета-
лизации (рис. 3.22) обнаруживаем, что в системе управления на самом
деле использованы три типа обратной связи.
S.
—9—
I
аеА
Рис.
3.21
г— Se -
.1Г
Sy
i|
^
е
• '
К
1 '^ Ю
?
*м 1
1 р /*
' '^р ы—
'—1 1
<>
1
у (/
1 р _J
и
^аеА
V.
J
Рис.
3.22
Из приведенных схем легко увидеть, что 0-связь действует согла-
сованно с ОК-связью и направлена на стабилизацию
(т
в нуле.
В предыдущей схеме выбор оператора 0-обратной связи Rp доста-
точно произволен, и поэтому в этой схеме имеется еще достаточно
свободы, чтобы наделить тр?.екторию дрейфа параметров оператора
Se(c) c(t) е с теми или пными нужными свойствами. Это может
оказаться весьма кстати, так как оператор
Se (с)
ответственен за ка-
чество системы управления. Пусть, например, требуется приблизить
функцию c{t) к функции c'(t) € С, используя для этого дополнитель-
3.3.
Структурный синтез
бинарных
систем
147
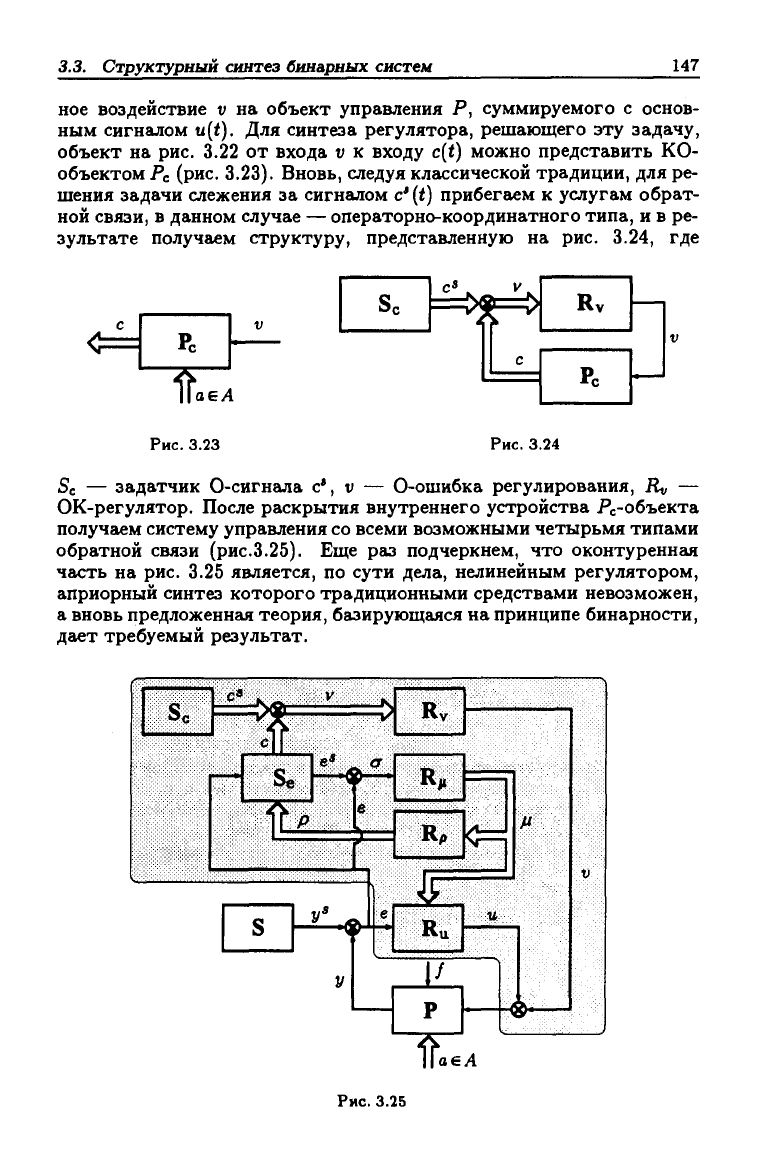
ное воздействие v на объект управления Р, суммируемого с основ-
ным сигналом u{t). Для синтеза регулятора, решающего эту задачу,
объект на рис. 3.22 от входа v к входу c{t) можно представить КО-
объектом
Ре
(рис. 3.23). Вновь, следуя классической традиции, для ре-
шения задачи слежения за сигналом
с*
(t) прибегаем к услугам обрат-
ной связи, в данном случае — операторно-координатного типа, и в ре-
зультате получаем структуру, представленную на рис. 3.24, где
Рс
Пае/
V
Sc
Z
1
с
Rv
Рс
Рис. 3.23 Рис. 3.24
Se — задатчик 0-сигнала с', v — 0-ошибка регулирования,
FUJ
—
ОК-регулятор. После раскрытия внутреннего устройства Рс-объекта
получаем систему управления со всеми возможными четырьмя типами
обратной связи (рис.3.25). Еще раз подчеркнем, что оконтуренная
часть на рис. 3.25 является, по сути дела, нелинейным регулятором,
априорный синтез которого традиционными средствами невозможен,
а вновь предложенная теория, базирующаяся на принципе бинарности,
дает требуемый результат.
So
"' -^JDV " - -
р S. -^
1^"
:
' 9
S -^-^
у
—• IVv
а
•—• R,, 1
i 1 1
1 R« /^—
1 »жр v^
"1 ^
J-
Ru -^
V
— р —
^—
V
J.
еА
Рис. 3.25

148 Глава 3. Теории новых
типов обратной
связи
3.3.2.
Нелинейная обратная связь
как средство подавления неопределенности
Главная идея продемонстрированного выше подхода к структурному
синтезу динамических систем состоит в сведении сложной новой за-
дачи к последовательности традиционных и решаемых, по крайней
мере принципиально, известными средствами задач.
Для простоты был использован только принцип регулирования по
отклонению, который в сочетании с принципом бинарности позво-
лил получить достаточно большое разнообразие структур нелиней-
ных систем. Разумеется, это разнообразие еще более увеличится, если
привлечь к структурному синтезу и другие известные принципы ре-
гулирования, которые без особых оговорок, в силу своей общности,
применимы и в рассматриваемой задаче стабилизации. Мы опускаем
связанные с этим детали, отмечая только принципиальную сторону
предлагаемого подхода.
Сама идея нового подхода может быть также сформулирована как
принцип генерации структур: процедуру Синтеза сложного регуля-
тора следует представить в виде последовательности задач синтеза,
решаемых традиционными средствами.
Разумеется, не каждая проблема допускает такую декомпозицию,
но число таких проблем достаточно велико. Рассмотрим, например,
задачу о понижении размерности замкнутой системы. Из структур-
ной схемы на рис. 3.25 видно, что при обнулении ошибки ОК-контура,
т.е.
при выполнении равенства
(Г = 0, (3.3)
появляется дополнительная связь между переменными состояния
S,e = е, (3.4)
нгшичие которой означает их зависимость, а значит, порядок системы
понижается на pcL3MepHOCTb связи. Поэтому естествен вопрос: нельзя
ли наладить регулярное вырождение порядка путем установления свя-
зей вида (3.3). Но как этого добиться? Ведь если в схеме на рис. 3.26
для вырождения использован естественный управляющий вход, то в
•^
R;.
Рис.
3.26
3.3.
Структурный синтез
бинарных
систем
149
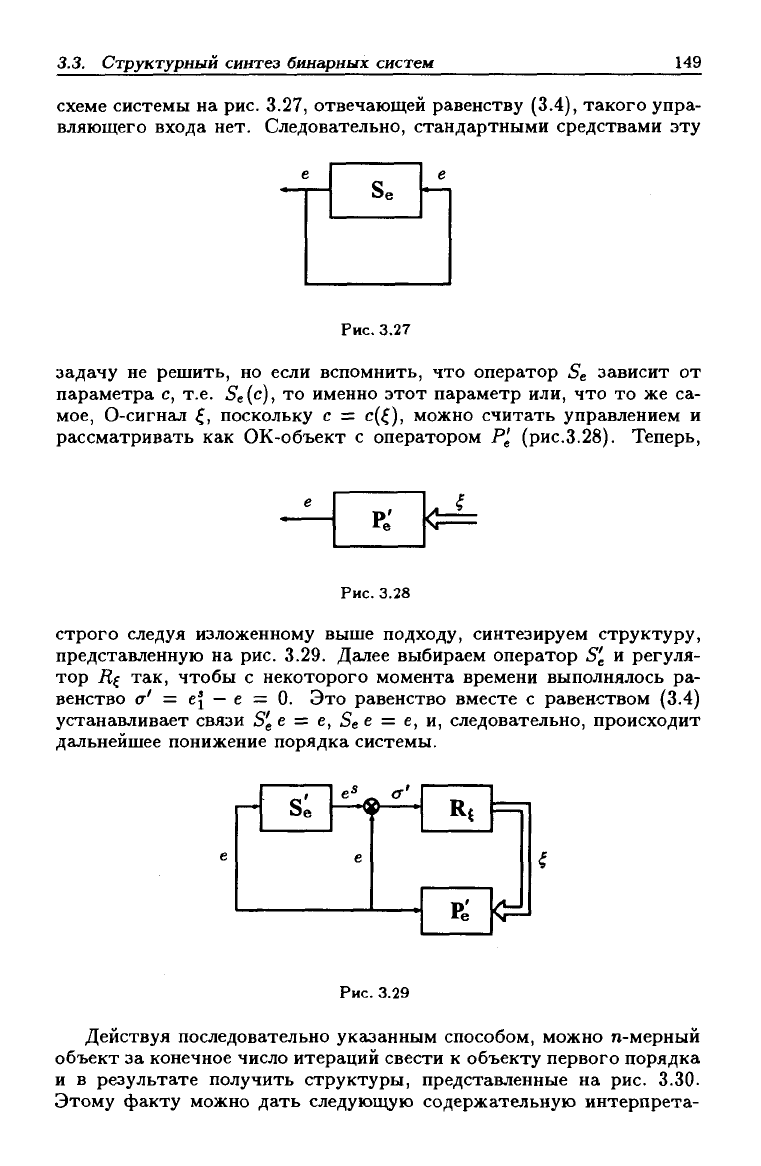
схеме системы на рис. 3.27, отвечающей равенству (3.4), такого упра-
вляющего входа нет. Следовательно, стандартными средствами эту
е
Se
е
Рис.
3.27
задачу не решить, но если вспомнить, что оператор ^е зависит от
параметра с, т.е. Se(c), то именно этот параметр или, что то же са-
мое,
О-сигнгил £, поскольку с = с(^), можно считать управлением и
рассматривать как ОК-объект с оператором Р^ (рис.3.28). Теперь,
Ре
Рис.
3.28
строго следуя изложенному выше подходу, синтезируем структуру,
представленную на рис. 3.29. Далее выбираем оператор S'^ и регуля-
тор Rf так, чтобы с некоторого момента времени выполнялось ра-
венство а' = е\ — е = 0. Это равенство вместе с равенством (3.4)
устанавливает связи S'^e = е, See = е, и, следовательно, происходит
дальнейшее понижение порядка системы.
s;
е
^
Рис.
3.29
К«
Рё
oil
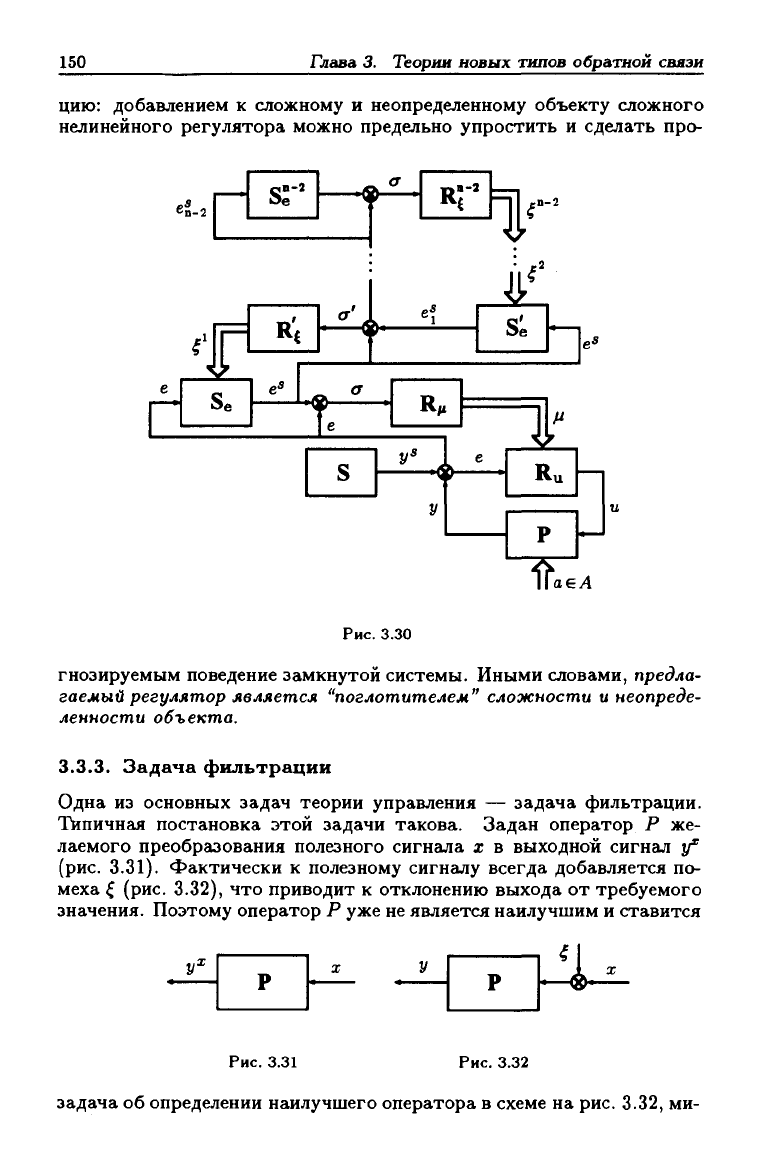
Действуя последовательно указанным способом, можно п-мерный
объект за конечное число итераций свести к объекту первого порядка
и в результате получить структуры, представленные на рис. 3.30.
Этому факту можно дать следующую содержательную интерпрета-
150
Глава 3. Теории новых
типов обратной
связи
цию:
добавлением к сложному и неопределенному объекту сложного
нелинейного регулятора можно предельно упростить и сделать про-
sV
1
Ф
Г-^
S I , ,
Ji!
s;
I
1
Ru
P
Та
еЛ
Рис.
3.30
гнозируемым поведение замкнутой системы. Иными словами, предла-
гаемый регулятор является "поглотителем" сложности и неопреде-
ленности объекта.
3.3.3.
Задача фильтрации
Одна из основных задач теории управления — задача фильтрации.
Типичная постановка этой задачи такова. Задан оператор Р же-
лаемого преобразования полезного сигнала х в выходной сигнал if
(рис.
3.31). Фактически к полезному сигналу всегда добавляется по-
меха ^ (рис. 3.32), что приводит к отклонению выхода от требуемого
значения. Поэтому оператор Р уже не является наилучшим и ставится
Рис.
3.31 Рис. 3.32
задача об определении наилучшего оператора в схеме на рис. 3.32, ми-