Емельянов С.В. Новые типы обратной связи
Подождите немного. Документ загружается.

3.3.
Структурный
синтез бинарных
систем
151
нимизирующего "расстояние" между jf и у, т.е.
-Popt = argminr(j/* - у),
где г(-,) — надлежащим образом определенное расстояние, напри-
мер,
среднеквадратическое уклонение, когда речь идет о случайных
сигналах.
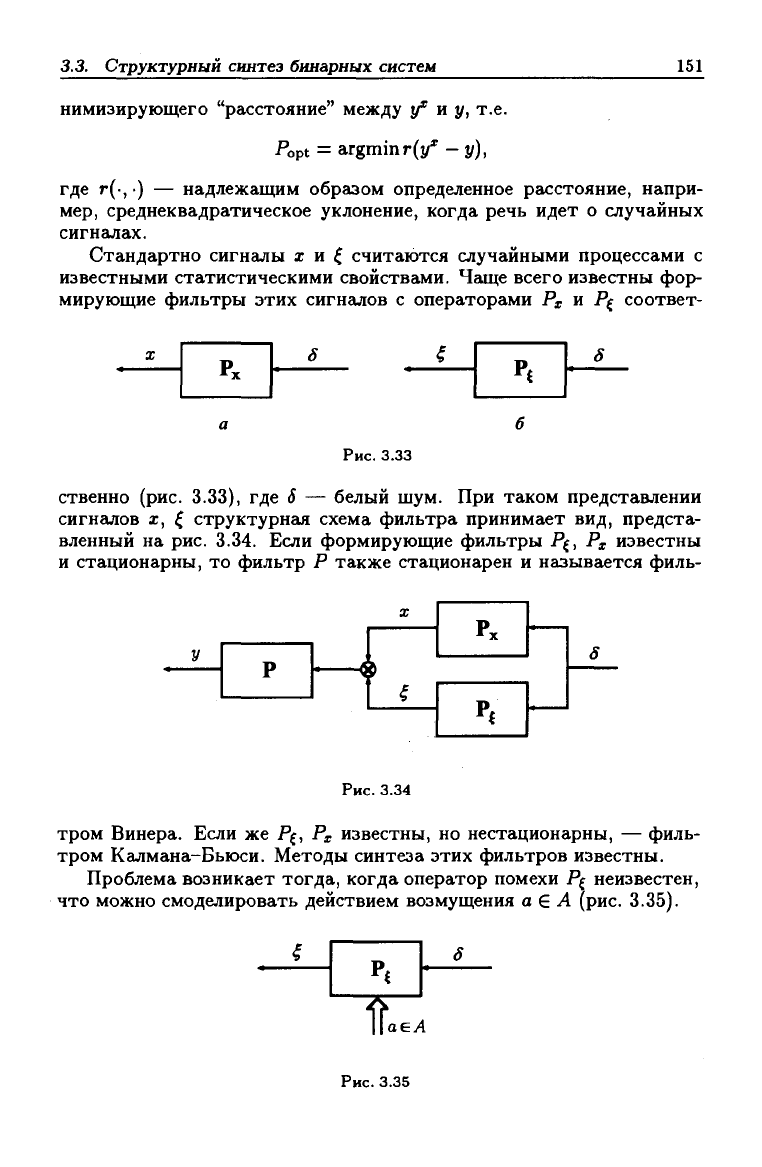
Стандартно сигналы х и ^ считаются случайными процессами с
известными статистическими свойствами. Чгице всего известны фор-
мирующие фильтры этих сигналов с операторами Рх и Р( соответ-
Рис.
3.33
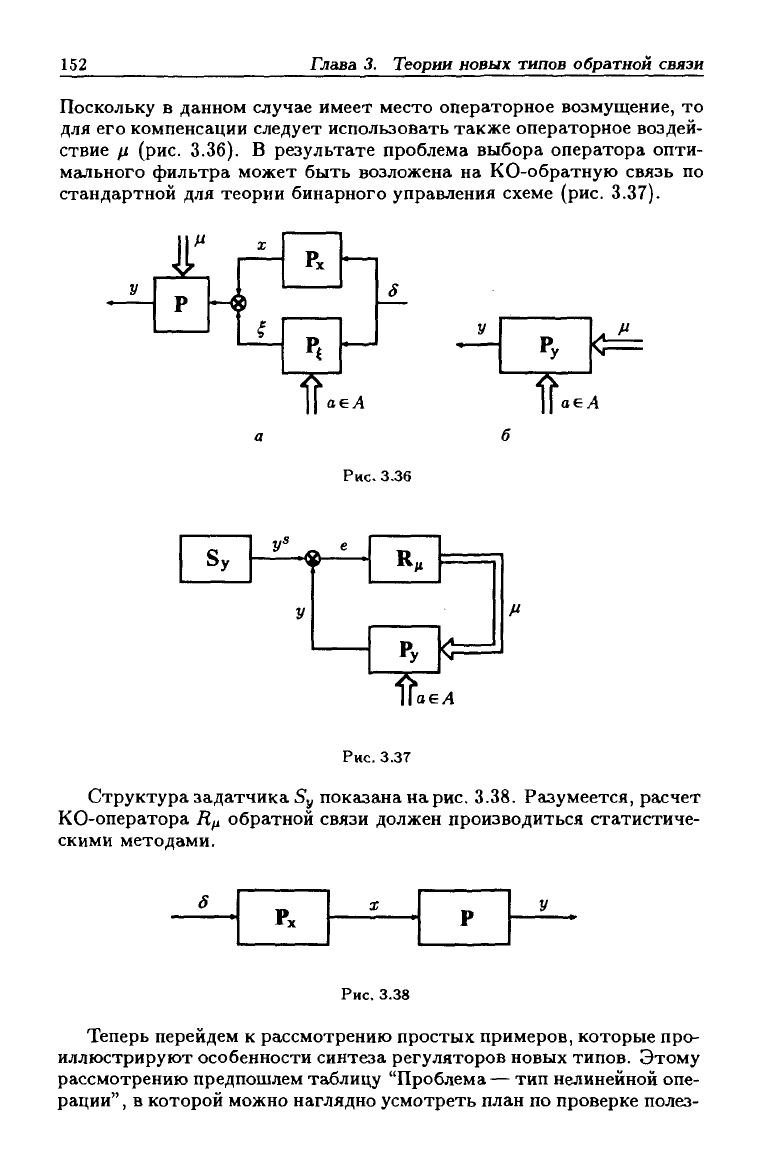
ственно (рис. 3.33), где S — белый шум. При таком представлении
сигналов X, ^ структурная схема фильтра принимает вид, предста-
вленный на рис. 3.34. Если формирующие фильтры Р(, Р^ известны
и стационарны, то фильтр Р также стационарен и называется филь-
-9
Рис.
3.34
тром Винера. Если же Р^, Рх известны, но нестационарны, — филь-
тром Калмана-Бьюси. Методы синтеза этих фильтров известны.
Проблема возникает тогда, когда оператор помехи Р( неизвестен,
что можно смоделировать действием возмущения а £ А (рис. 3.35).
J.
еА
Рис.
3.35
152
Глава 3. Теории новых
типов обратной
связи
Поскольку в данном случае имеет место операторное возмущение, то
для его компенсации следует использовать также операторное воздей-
ствие /л (рис. З.Зб). В результате проблема выбора оператора опти-
мального фильтра может быть возложена на КО-обратную связь по
стандартной для теории бинарного управления схеме (рис. 3.37).
Рх
i'i
т^
еЛ
I
оеЛ
Рис.
3.36
Sy
'" б
у
а
^
9
•
Нд
iV
/*—'
^j—'
¥а
еА
Рис.
3.37
Структура задатчика 5у показана на
рис.
3.38. Разумеется, расчет
КО-оператора Л^, обратной связи должен производиться статистиче-
скими методами.
Рис.
3.38
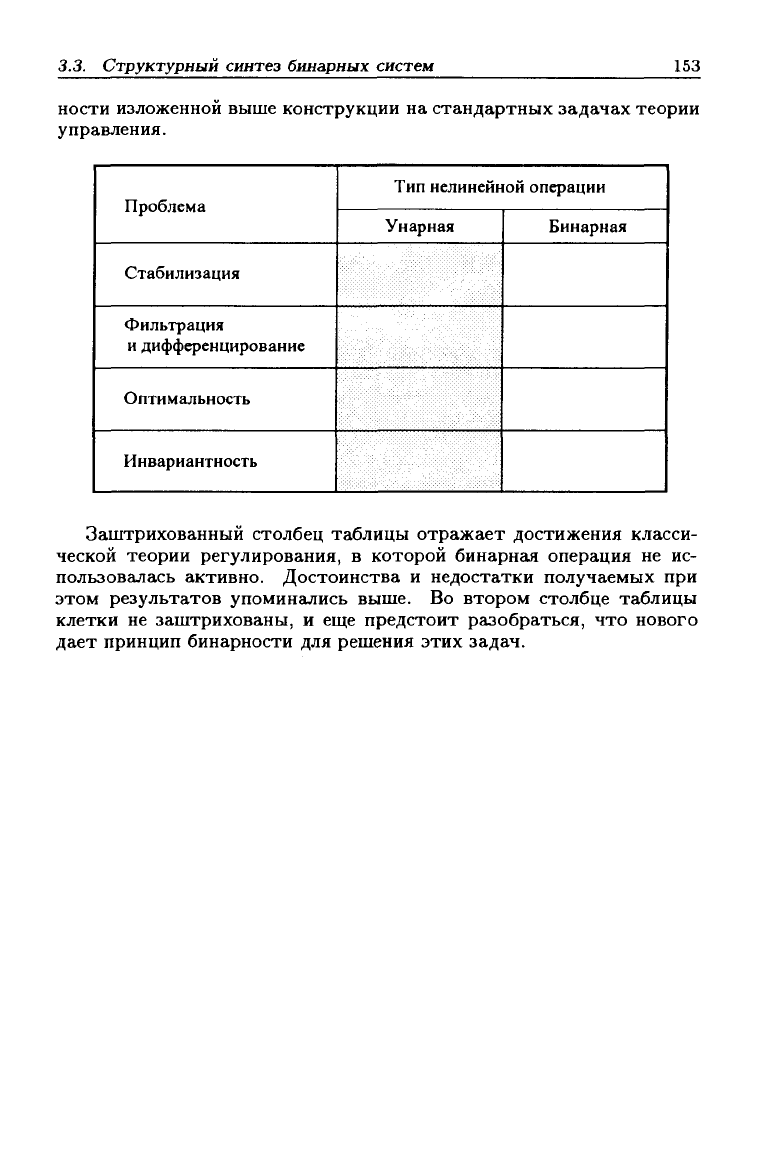
Теперь перейдем к рассмотрению простых примеров, которые про-
иллюстрируют особенности синтеза регуляторов новых типов. Этому
рассмотрению предпошлем таблицу "Проблема — тип нелинейной опе-
рации"
,
в которой можно наглядно усмотреть план по проверке полез-
3.3.
Структурный синтез
бинарных
систем
153
ности изложенной выше конструкции на стандартных задачах теории
управления.
Проблема
Стабилизация
Фильтрация
и дифференцирование
Оптимальность
Инвариантность
Тип нелинейной операции
Унарная Бинарная
Заштрихованный столбец таблицы отражает достижения класси-
ческой теории регулирования, в которой бинарная операция не ис-
пользовалась активно. Достоинства и недостатки получаемых при
этом результатов упоминались выше. Во втором столбце таблицы
клетки не заштрихованы, и еще предстоит разобраться, что нового
дает принцип бинарности для решения этих задач.
Глава 4
Теория координатно-операторной
обратной связи
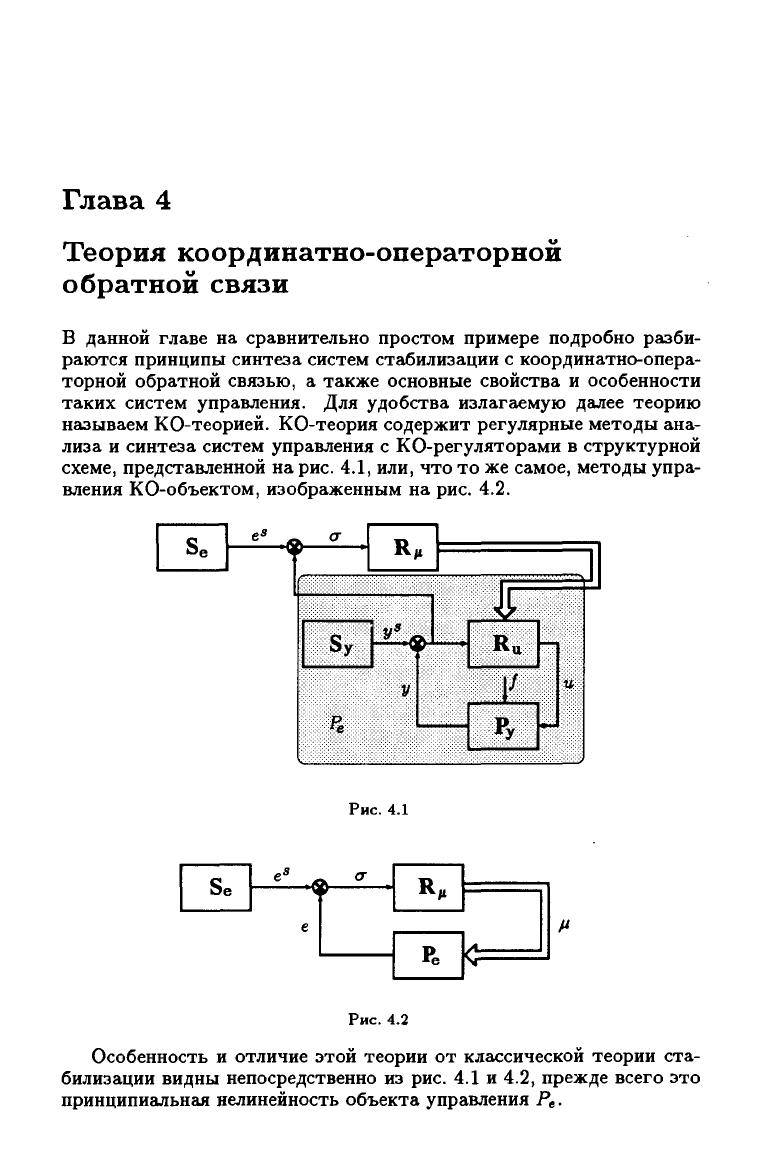
в данной главе на сравнительно простом примере подробно разби-
раются принципы синтеза систем стабилизации с координатно-опера-
торной обратной связью, а также основные свойства и особенности
таких систем управления. Для удобства излагаемую далее теорию
называем КО-теорией. КО-теория содержит регулярные методы ана-
лиза и синтеза систем управления с КО-регуляторами в структурной
схеме, представленной на рис.
4.1,
или, что то же самое, методы упра-
вления КО-объектом, изображенным на рис. 4.2.
с
>3е
е« _
-ч
Se
а
Sy
«•М
•^
У
R
*е
У
Рис.
4.1
iff-
*\
е
Рис.4
К,
Ре
.2
Г"
Ru -
К
Ру •
и
/•
Ч|
М
Особенность и отличие этой теории от классической теории ста-
билизации видны непосредственно из рис. 4.1 и 4.2, прежде всего это
принципиальная нелинейность объекта управления Ре-
4.1.
Стабилизация объекта второго
порядка 155
Следовательно, стандартные методы синтеза обратной связи не-
применимы и нужно искать новые подходы. Продемонстрируем по-
лезность и конструктивность использования для этой цели изложен-
ных в предыдущей главе принципов генерации и бинарности новых
типов обратных связей.
4.1.
Стабилизация объекта второго порядка
с неизвестными параметрами
и внешним воздействием
Рассмотрим простейший объект второго порядка Е'':
XI = 12,
Х2 = axi+bu + f, (4.1)
y = CXi +Х2,
с неизвестными параметрами а, 6 и возмущением /, удовлетворяю-
щими включениям
аеА = {а\\а\<ао},
Ь
е В = {Ь \0 <Ь- <Ь <Ь+},
/eF*='{/|l/l</m},
где числа оо, 6^ и функция /„ известны. Этот объект, называ-
емый далее Е^-системой, позволяет дать содержательный набросок
КО-теории, отражающий, практически без изъятий, ее основные по-
ложения и результаты.
В задаче стабилизации Е*"-системы требуется указать робастную
гладкую обратную связь по состоянию, стабилизирующую Е^-систему
при произвольном изменении параметров а £ А, Ь £ В и любом воз-
мущении f Е F.
Из предшествующего изложения совершенно ясно, что стандарт-
ные подходы к этой задаче не гарантируют ее решения, ибо:
• глубокая обратн£1Я связь неробастна;
• адаптивное управление неприменимо, так как не выполнены основ-
ные условия: квазистационарность параметров и действие исчеза-
ющего возмущения;
• методы СПС ориентированы на использование разрывного упра-
вления, когда робастность не достигается.
При синтезе КО-регулятора будем следовать рекомендациям об-
щей теории систем с новыми типами обратной связи, но прежде ука-
жем два полезных и сильно упрощающих дело нгьблюдения.
156 Глава 4. Теория
коордиматно-операторной обратной
связи
4.1.1.
Принцип скаляриэации и уравнение объекта
в пространстве ошибок
Этот принцип позволяет при естественных условиях и при выполне-
нии МС-условия (т.е. условия согласованности возмущения) свести
задачу стабилизации многомерного объекта к задаче стабилизации
скалярного объекта.
Действительно, нетрудно убедиться, что выход Е^-системы экспо-
ненциально стремится к нулю (что и означает решение задачи ста-
билизации), если при некотором числе d >
О
обеспечено выполнение
связи
xi-|-rfxi=0. (4.2)
Величину
(Т
= ii + dXi
=:
Х2 + dxi
назовем ошибкой реализации желаемой связи (4.2).
Теперь очевидно, что стабилизация ошибки
<т
в нуле и будет озна-
чать решение исходной задачи. Но отсюда еще не следует, что задача
стала скалярной. Для того чтобы убедиться в этом, перейдем от ис-
ходного пространства координат (xi,X2) к пространству ошибок —
координатам (xi,
<т).
Для этого находим сначала, что
О'
= XI -f dx\ =
Х2
-f dx2 = axi + bu -|- / -f dx2.
Из уравнения a =
X2
+ dxi выражаем переменную X2:
X2 =
<T —
dxi.
В уравнениях S''-системы заменяем X2 найденным выражением. В
результате получаем искомые уравнения движения в виде
XI = -dxi +
(т,
(4.3)
&i=da+{a + d^)xi + bu + f. (4.4)
Уравнение (4.3) будем называть далее Ef-системой, а (4.4) — Е^-
системой. Из уравнений (4.3), (4.4) видно, что при <г —> О автома-
тически следует, что и xi
—*
0. Следовательно, для решения задачи
стабилизации можно ограничиться скалярным Ез-уравнением.
Если ввести обозначение
f = f + (a + d^)xr,
то указанными преобразованиями исходная проблема сводится к ста-
билизации скалярного Е2-объекта вида
&
=
dcr
+ bu + f, (4.5)
находящегося под воздействием неизвестного возмущения f Е F, для
которого известна только мажоранта
^={/|
\f\<{d^+ao)\xi\ + fm=fm}.
4.1.
Стабилизация объекта второго порядка
157
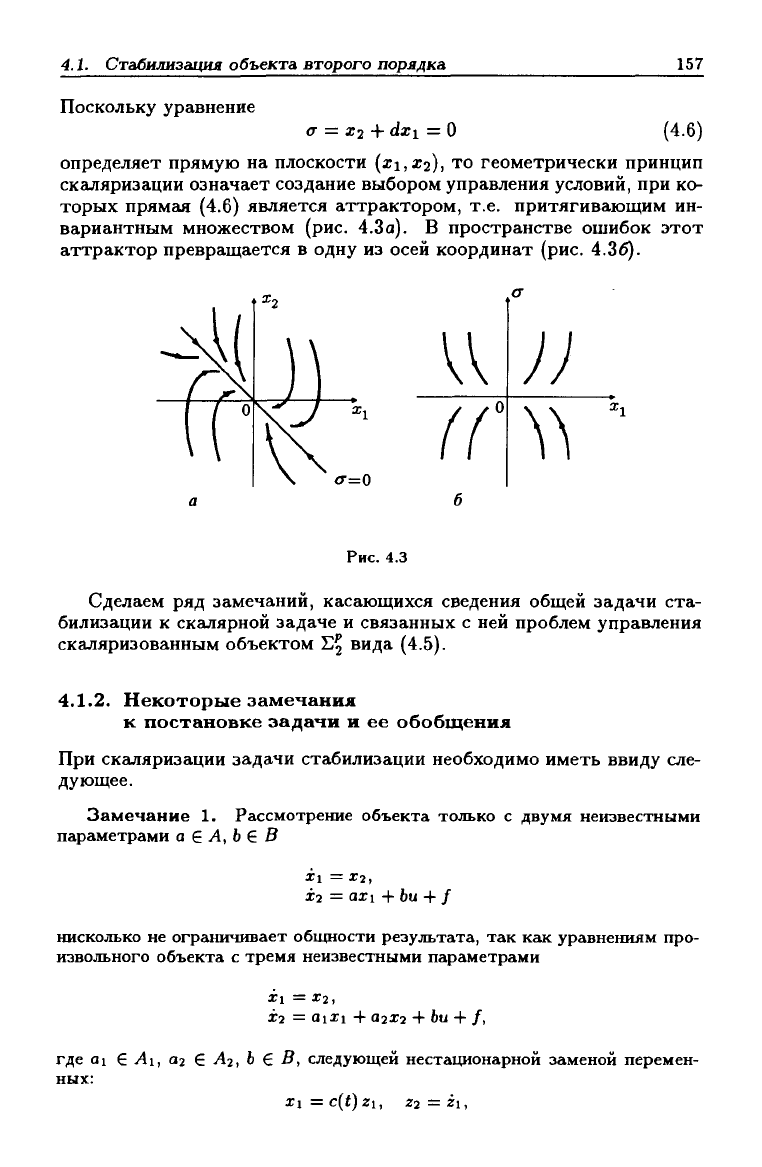
Поскольку уравнение
а — Х2 + dxi =
О
(4.6)
определяет прямую на плоскости (11,12)1 то геометрически принцип
скаляризации означает создание выбором управления условий, при ко-
торых прямая (4.6) является аттрактором, т.е. притягивающим ин-
вариантным множеством (рис. 4.3а). В пространстве ошибок этот
аттрактор превращается в одну из осей координат (рис. 4.36).
VV
tr
JJ
W
Рис.
4.3
Сделаем ряд замечаний, касающихся сведения общей задачи ста-
билизации к скалярной задаче и связанных с ней проблем управления
скаляризованным объектом Ej вида (4.5).
4.1.2.
Некоторые замечания
к постановке задачи и ее обобщения
При скаляризации задачи стабилизации необходимо иметь ввиду сле-
дующее.
Замечание 1. Рассмотрение объекта только с двумя неизвестными
параметрами а £ А, b G В
XI = Г2,
Х2 = axi +bu + f
нисколько не огргшичивает общности результата, так как уравнениям про-
извольного объекта с тремя неизвестными параметрами
Xl = Х2,
Х2 = aiXi + 02x2 •^Ьи + f,
где oi £ Ai, 02 € А2, Ь £ В, следующей нестационарной заменой перемен-
ных:
XI = C{t)zi, Z2 = il,
158 Глава 4. Теория координатно-операторной обратной связи
можно придать требуемый в рассматриваемой постановке задачи вид
ij = Zz\ +bu+ f.
Здесь
~ c + ojc + aic ~ Ь 7 /
« -с ^=c' •^=7'
если только c(t) — решение дифференциального уравнения
2с+020 = 0.
Замечание 2. Принцип скаляризации применим к Тфоизвольным объ-
екта общего положения с одним входом и одним выходом, т.е. к объектам
вида
Xi = Xi+i, 1=1, ...,n — 1,
n
Xn= Yl
<»'
^i +
W
+ /. y= ex.
Ы1
Действительно, в дгшном случае достаточно выбрать новую ошибку в виде
п-1
<г
= х„+ /_]<i,- Xi, di = const > О,
и в (n
—
1)-м уравнении D-системы заменить х„ на выражение
п-1
х„ =
—
У di
Xi
+
<r,
isl
a вместо последнего ургшнения в Е-системе записать уравнение
п
<т
= (dn-i -а„)<т+ ^J"*'^' + " + /•
ISl
в результате получим две подсистемы: Ei-систему (п
—
1)-го порядка
Xi = xi+1,
«'
= 1, ... ,п
—
2,
п
х„_1 =
—
^ diXi + <т,
isl
и скалярную Ез-систему
сг
= dir +
U
+ f, у = с'х + Спв,
где х' = col («1, ...
,
in-i), с = (с', с„). При этом, если параметры di таковы,
что El-система при
<г
=
О
Xi = Xi+i, • = 1,
•
•. , п
—
2,
п
Хп-1 = — Х^ diXi
isl
экспоненциально устойчива, то вновь из условия
<т
-f
О
следует, что Xi -+ О,
что является формгкльным выражением принципа скаляризации.
4.1.
Стабилизация объекта второго порядка
159
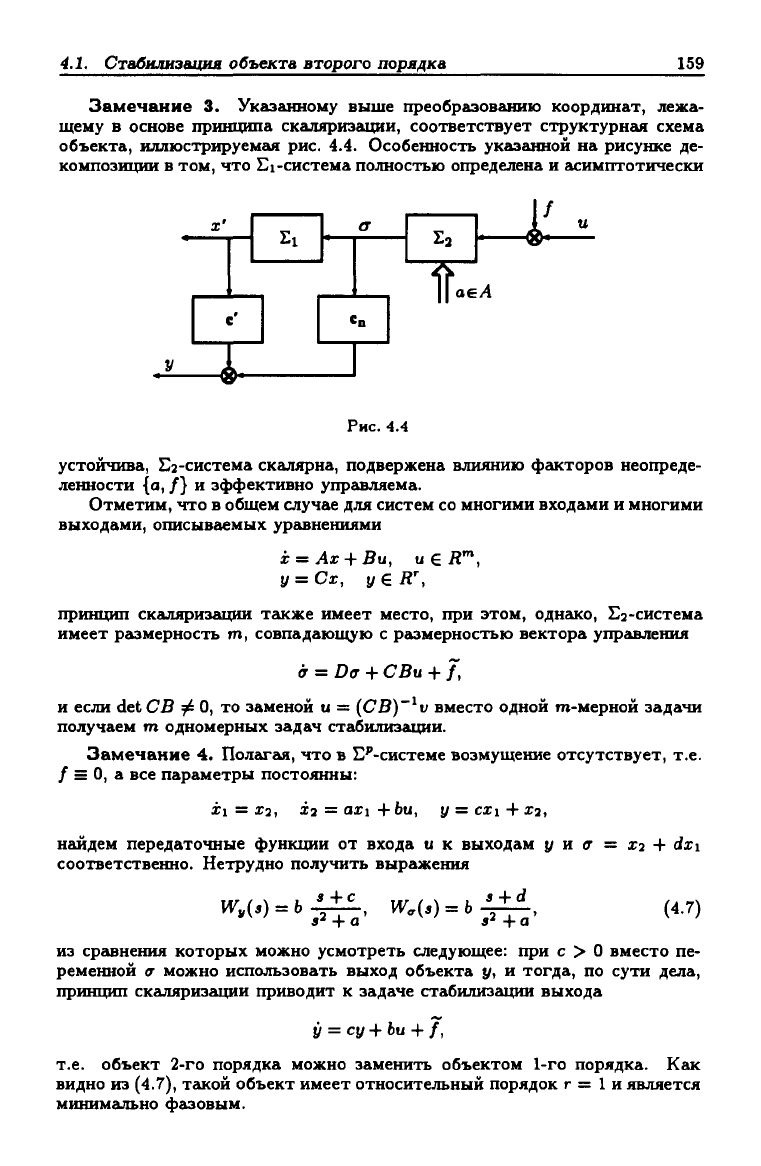
Замечание 3. Указанному выше преобразованию координат, лежа-
щему в основе принципа скаляриэации, соответствует структурнгья схема
объекта, иллюстрируемая рис. 4.4. Особенность указанной на рисунке де-
композиции в том, что El-система полностью определена и асимптотически
J
Zj
1ГабЛ
Рис.
4.4
устойчива, Ез-система скалярна, подвержена влиянию факторов неопреде-
ленности {а, /} и эффективно упргшляема.
Отметим, что в общем случае для систем со многими входами и многими
выходами, описываемых уравнениями
х = Ах + Ви,
U
е Д"*,
У = Сх, у € Д^
принцип скгшяризации также имеет место, при этом, однако, Ег-система
имеет размерность т, совпадающую с размерностью вектора управления
* = Dff + СВи
+
7,
и если detCB ф О, то заменой и = (CB)~'f вместо одной т-мерной задачи
получаем m одномерных задач стабилизации.
Замечание 4. Полагая, что в E''-системе возмущение отсутствует, т.е.
/ = О, а все параметры постоянны:
ii=X2,
X2=axi-|-6u, 5/ = cxi+X2,
найдем передаточные функции от входа и к выходам у и (г = xj Ч- dx\
соответственно. Нетрудно получить выражения
^''(') = ЬЙ7- И'.(5) = Ь^
«2 +а'
a^-l-a
(4.7)
из сравнения которых можно усмотреть следующее: при с > О вместо пе-
ременной а можно использовать выход объекта у, и тогда, по сути дела,
принцип скаляриэации приводит к задаче стабилизации выхода
у = су
-I-
Ьи -f- /,
т.е.
объект 2-го порядка можно заменить объектом 1-го порядка. Как
видно из (4.7), такой объект имеет относительный порядок г = 1 и является
минимально фгкзовым.
160 Глава 4. Теория координатно-операторной обратной связи
Замечание 5. Выбор обратной связи, стабилизирующей Е^-объект:
а = da +
Ъи
+ f,
особенно прост, когда имеется полная информация о параметрах и возму-
щениях. В самом деле, при этих предположениях управление и = t;
—
f/b
сводит задачу стабилизации к тривиальной
&
= dff + V,
когда выбор управления t; очевиден. Если же параметры или возмущение не-
известны, то проблема становится сложнее, так как методы стабилизации
классической теории регулировгшия: глубокая обратнг^я связь (и = —fcu,
к
—>
оо), адгштивная обратная связь (и = —ка, к = la^, f = const > 0), си-
стема переменной структуры (и = —fm sgntr), при известных достоинствах
имеют недостатки и ограничения по применению.
Замечание 6. Покажем, что линейная обратная связь
u =
—k2<T —
kix\ (4.8)
с ограниченными коэффициентами годится для стабилизгщии свободных
движений неопределенного объекта с постоянными априорно ограничен-
ными параметрами (названного ранее интервальным объектом)
(Г
=
d<T
+ Ьи + (а - d^)xi, (4.9)
но,
вообще говоря, не решает задачи при изменении параметров а, Ь или
при наличии внешнего возмущения
cr
= d(r + bu +
{a-d^)xi+f,
f
&
F. (4.10)
Действительно, после подстановки (4.8) в (4.9) и при f =
О
получим
& = {d-bk2)(T + {a-d^-bki)xi, (4.11)
и для анализа асимптотики
(т{1)
это уравнение следует дополнить уравне-
нием для ошибки II, т.е.
xi =
-dxi+iT.
(4.12)
Характеристический полином замкнутой системы (4.11) и (4.12) дается
выражением
det
s + d -1
bki -a +
d'^
s + bki -d
= s^ +bk-iS-\-bki -a + dbk2 =0,
и ясно, что при выполнении следуюхцих условии
к2>0, b~ki+db~k2> а~ (4.13)
замкнутая система асимптотически устойчива.
При изменении параметров условия (4.13) уже не гарантируют устойчи-
вость системы, а действие возмущения даже 1фи устойчивости свободных
движений не гарантирует стабилизируемости.