Емельянов С.В. Новые типы обратной связи
Подождите немного. Документ загружается.

5.1.
Предварительные
сведения
181
в режиме скольжения (т = О, то искомый фазовый вектор должен удо-
влетворять уравнению
где V(T — градиент функции
(т{х)
в точке х. Решая последнее урав-
нение относительно параметра а, находим
(V<T, (/--/+))•
Соответствующее дифференциальное уравнение имеет вид
х
= и. =f--a*if--f+) =
и описывает движение по поверхностям уровня а{х) = const. Для
получения уравнения скольжения нужно дополнить его равенством
«г
=
О,
X
€ Mgi.
Уравнениям скольжения
i = fsi{x), <т(ж) = 0, а:€М,1
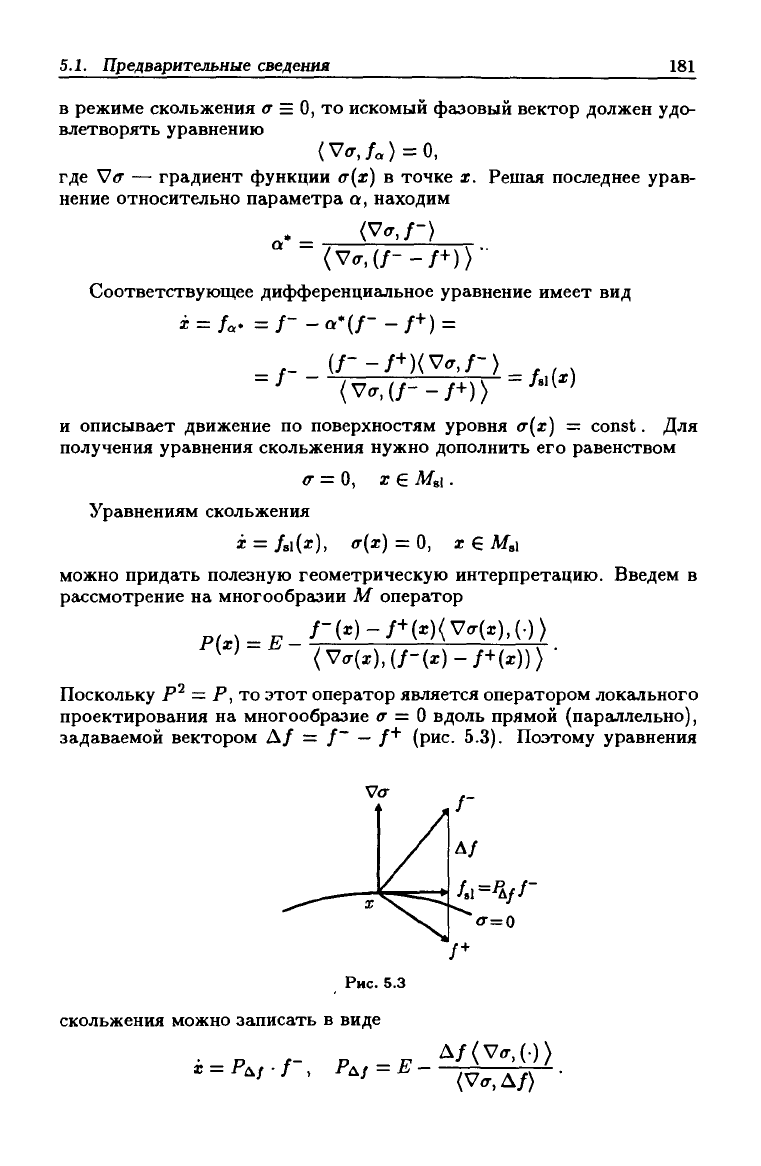
можно придать полезную геометрическую интерпретацию. Введем в
рассмотрение на многообразии М оператор
Р{х) = Е-
f-{x)-f+{x){V<T{x),{.))
{V<T(x),{f-(x)-f+(x))) •
Поскольку Р'^ = Р, то этот оператор является оператором локального
проектирования на многообразие с =
О
вдоль прямой (параллельно),
задаваемой вектором Д/ = /"
—
/+ (рис. 5.3). Поэтому уравнения
Рис. 5.3
скольжения можно записать в виде
^ = Рд/Г, Рм = Е-
А/(У<т,(-))
(V<r,A/)
182 Глава 5. Скользящие
режимы
высших порядков
Для рассматриваемого уравнения х = f + Ьи вектор
Д/ = / + Ьи~ - f-
Ьи"^
= Ь(и~ - и"*") = ЬАи,
и если Ди ф О, то векторы Д/ и 6 коллинеарны. Следовательно, верно
равенство
а так как по свойству оператора проектирования
b(Va,b)
'^•'-(-^>='-
= 0,
<V<T,6)
то уравнения скольжения можно записать в более компактном виде:
X
= Pbf, (7 = 0, l€Msl.
5.1.2. Об инвариантности уравнения скольжения
по отношению к возмущениям,
удовлетворяющим условию согласованности
Напомним, что внешнее возмущение
<p{t,
х) удовлетворяет условию со-
гласованности (МС-условию), если оно действует в канале управления
x = f + b{u +
(p).
(5.1)
В силу указанного выше свойства
РьЬ
= 0.
Уравнения скольжения по многообразию М для возмущенного (5.1) и
невозмущенного
X
= f +
Ьи
объектов совпадают и даются формулами
x = Pbf,
<г
= О, х£ Msi С М. (5.2)
Именно этот математический факт проясняет тот интерес, кото-
рый постоянно проявляется в теории управления и ее приложениях к
идее интегргшьного многообразия и ее реализации с помощью разрыв-
ной и глубокой обратных связей.
Здесь уместно заметить, что уравнения (5.2) описывают также
движение в системе с глубокой обратной связью
X
= f +
Ьи
= / -
кЬ(т,
к = const > О, (5.3)
и=—к<7
Т.е. при устремлении коэффициента обратной связи в бесконечность
{к -> оо), если выполнено условие
(Vff,b)>0.
5.1.
Предварительные
сведения 183
Для того чтобы убедиться в этом, можно воспользоваться при-
веденными выше геометрическими соображениями или нижеследую-
щими выкладками. В силу уравнения движения находим
& = {V<Tj)-k{V,(T,b)a, (5.4)
и при указанных выше условиях изображающая точка "мгновенно"
достигает поверхности а(х) =
О
и далее ее не покидает, а значит, во
время движения имеет место равенство
&
=
О-
Воспользуемся теперь
следующим эвристическим приемом: выразим из уравнения
&
=
О
про-
изведение
к<т,
а результат подставим в уравнение (5.3), тогда получим
уравнение
которое вместе с равенством
<т
=
О
и задает уравнение движения си-
стемы с глубокой обратной связью. Видно, что оно совпадает с полу-
ченным выше уравнением скольжения разрывной системы.
В определенной степени стандартную разрывную систему и си-
стему с глубокой обратной связью можно рассматривать как два по-
люса реализации одной и той же идеи — идеи скольжения по гладкому
многообразию. В одном случг1е это скольжение осуществляется беско-
нечно гладко, а в другом — с разрывом уже первой производной функ-
ции, задающей поверхность скольжения. Оказывается, что между
этими двумя крайними системами существует бесконечно много си-
стем, "скользящих" по той же поверхности, но обладающих различной
степенью гладкости. О некоторых таких промежуточных системах и
идет речь в данной главе.
5.1.3.
Уравнения реального скольлсения
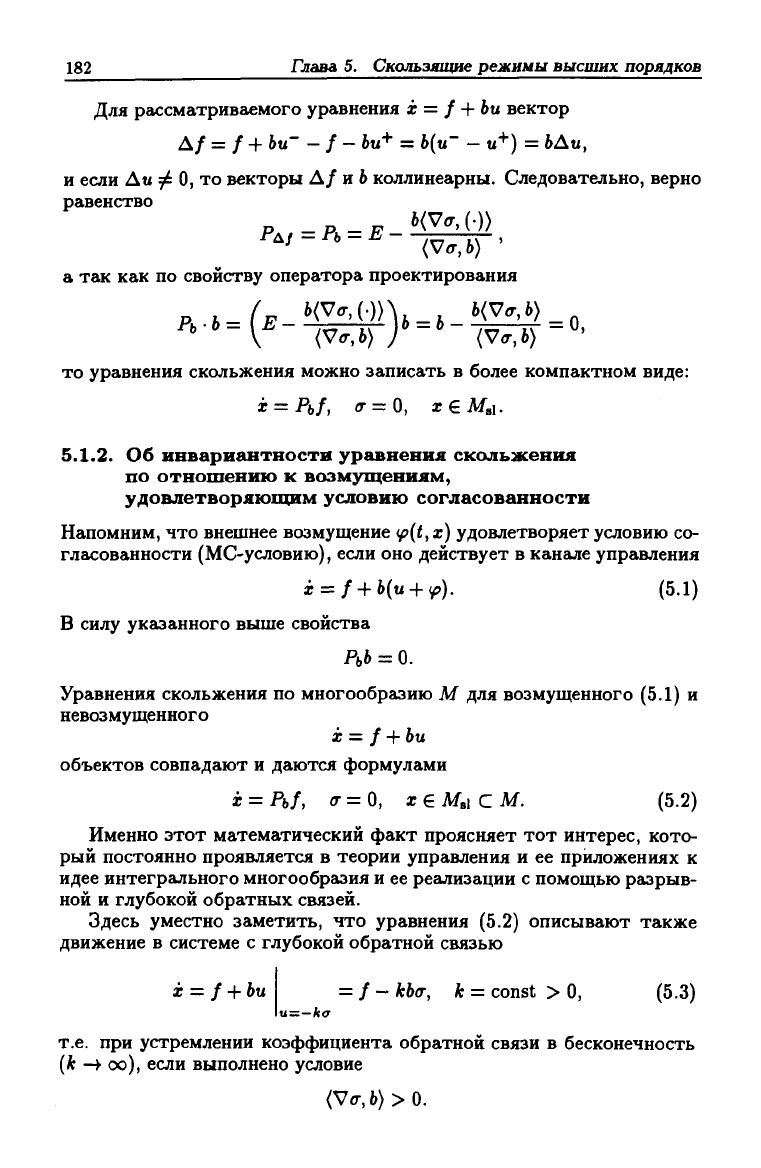
Практически, т.е. в реальных ситуациях, переключения разрывного
элемента происходят не точно на многообразии М = {г ] <т(г) = О},
но всегда в некоторой его окрестности
0(М) ={х|Их)|<Л(Д)},
где А(А) — "амплитуда" отклонения траекторий разрывной системы
i = /^ от многообразия М (рис. 5.4). Здесь и далее Д — параметр.
Рис. 5.4
184
Глава 5. Скользящие режимы высишх порядков
характеризующий неидеальность переключении, например временную
или пространственную задержку, быструю немоделируемую динами-
ку и т.п. Подобный режим скольжения принято называть реальным
скользящим режимом. При малых амплитудах А(А) его можно также
характеризовать "частотой" переключения W(A), для которой верна
оценка
W(A)
< ^М.,
^^- 2Л(Д)'
где II/II = min(||/~||, ((/•'"II). При устранении неидеальности пере-
ключения (т.е. при Д
—>
0) "амплитуда", как правило, уменьшается
до нуля, а "чгютота" растет до бесконечности, т.е.
lim W(A) = оо,
Д-vO
lim А{А) = 0.
Д-fO ^ '
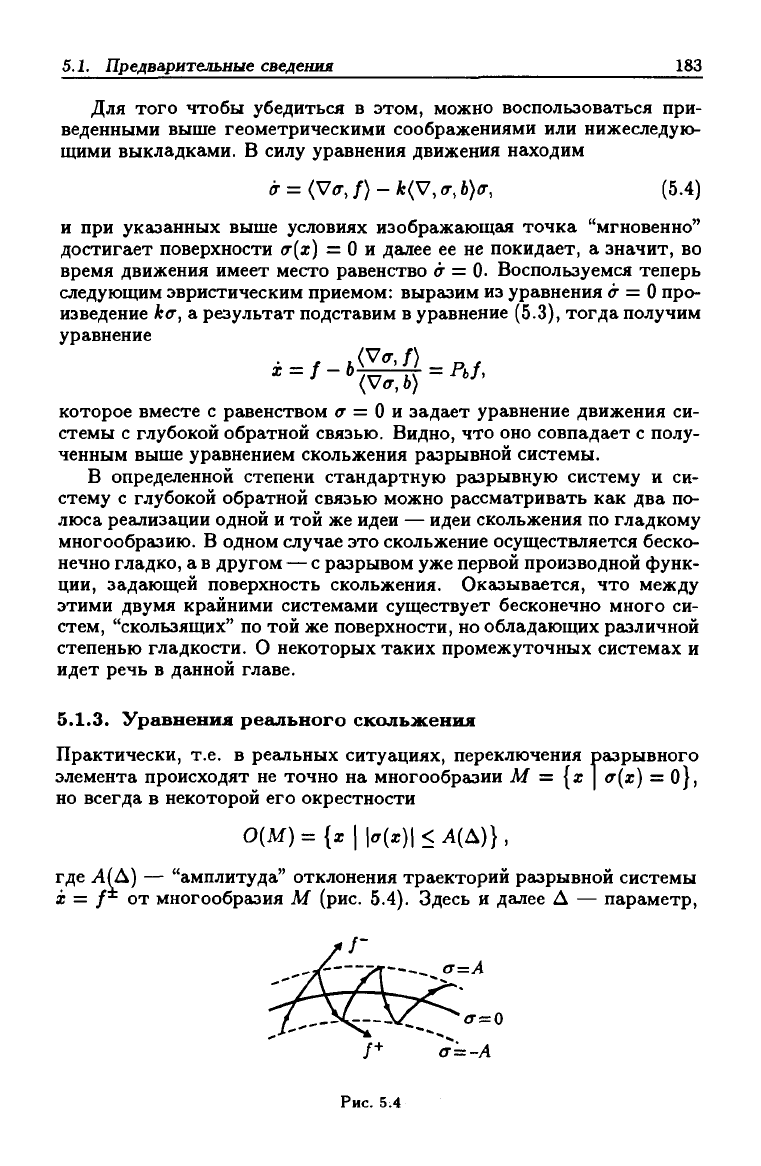
При этом реальное скольжение переходит в идеальное (рис. 5.5)
и весьма важен вопрос о порядке этого перехода по параметру Д.
о-=0
Рис. 5.5
Прежде чем точно определить то, что здесь имеется в виду, полу-
чим уравнения реального скольжения. Напомним, что при идеальном
скольжении
(а-
= 0) искомый фазовый вектор правой части уравнения
движения /eq (рис. 5.5) находится в результате решения уравнения
<r = (Vo-,/ec,) = 0.
При реальном скольжении выполнено неравенство |<т| < А{А), и
искомый вектор правой чг1сти системы реального скольжения /„ на-
ходится из неоднородного уравнения
<T
= (V<r,/„).
В частности, если система имеет вид
x = f +
b{a
+
!fi),
(5.5)
то последнее уравнение можно переписать следующим образом:
(Г
=
(V<T,
/)
Н-
(V<r,
Ь)и„ + (Vtr,
b)<p.
5.1.
Предварительные
сведения 185
Если {Vo-,6)^0, то
(У<г,/) &
""- {Va,b) ^ (Va,b) ^'
и после подстановки найденного значения в уравнения движения (5.5)
находим
{Va,b) (V<r,6>-
Если использовать оператор проецирования
(V<T,
6)
то последнее уравнение принимгьет вид
^ = ^^-^ + ^(V^ ^'-'^
и вместе с ограничением
к1 < А(А) (5.7)
определяет движение в реальном скользящем режиме.
Представляет интерес исследование близости решений идеального
и реального скольжения (обозначим их Xid(t) и x(t) соответственно),
выпущенных из одной начальной точки х° £ М при одном и том же
возмущении
<p{t).
Решение идеального скольжения описывается урав-
нениями
iid = Pbfixid), cr(xid) = О,
а решение реального скольжения имеет вид
х = Рь/{х) +
-^^^-^&,
\а(х)\<А(А).
Положим для простоты и без потери общности, что вектор
b
П = 7= ГТ- = const ,
<Va,6)
тогда оператор Рь = const, и после вычитания первого уравнения из
второго для ошибки е = X
—
Хи получаем следующее уравнение:
£ = Рь[ f{xid +£)- f(xid)]-\-h&.
По теореме Лагранжа для некоторого вектора 0 G [a^id, ^^id + е]
имеет место равенство
f{xid+e)-f{xid) = ^{e)e,
186 Глава 5. Скользящие режимы высших порядков
поэтому впредь имеем дело с уравнением вида
ox
Поскольку е(0) = О, то последнее дифференциальное уравнение
эквивалентно интегральному уравнению
t t t
£{t) = /Ме{т)dT + h f &dT= f ЛГе(г)dr + h(r{t).
0 0 0
Полагая, что на некотором отрезке
[О,
Т]
\т
<
D,
от интегрального уравнения переходим к скалярному неравенству для
нормы ошибки
с
11Ф)11<^^/|Иг)||йг + ||Л||Л(Д).
После применения леммы Гронуолла-Беллмана находим на отрезке
[О,
Т] искомую оценку
Таким образом, из принадлежности траекторий реального сколь-
жения окрестности многообразия М
0{М)={х I |о-|<Л(Д)}
следует их близость на конечном интернете времени к соответствую-
щим траекториям идеального скольжения с точностью порядка А(Д),
т.е.
с точностью реешьного скольжения. Отсюда следует, что
• нужно стремиться к повышению порядка реального скольжения
по отношению к параметру Д, ибо тогда большей точности при-
ближения к идеальному скольжению можно добиться при большей
неидеальности.
Иными словами, это и есть прямой путь к повышению прочности си-
стемы управления.
Аналогичная проблема возникеъет при дискретном моделировании
разрывных систем, когда роль параметра неидеальности выполняет
шаг дискретизации временной шкалы

5.1.
Предваритедьньге сведения 187
и разрывы имеют место на множестве дискретных моментов времени
{tj}.
В этом случае окрестность 0{М) реального скольжения харак-
теризуется неравенством
W{tj)\<A(h)
и для повышения точности моделирования нужно уменьшать шаг дис-
кретизации h, но тогда растут вычислительные затраты. Выгоды от
уменьшения Л возрастают с ростом порядка малости функции Л(Л)
по Л, т.е. чем выше число г в соотношении
A{h) ~ Л^
тем более высокая точность счета достигается при заданном шаге
интегрирования h.
Проведенные рассуждения актуализируют данную проблему изы-
скания средств повышения порядка функции А{А) по малому параме-
тру Д, определяющему "точность" реального скольжения.
5.1.4. Замечание о порядке скольхсения
От чего же зависит и чем определяется порядок скольжения?
Для ответа на этот вопрос рассмотрим движение в скользящем
режиме разрывной системы
i = f^{x) = f{x) + b(x)u^{x) (5.8)
по гладкому многообразию
Мо={х\
(т{х)
= 0} . (5.9)
Из (5.8), (5.9) имеем равенства
(T
= {V<T,/±) = (V<r,/)-KV<T,6)u±, (5.10)
и если векторные поля /*(х) трансверсальны Мо, то (Vcr, b)|^^ т^
О
и
на многообразии Мо возможен скользящий режим. При этом
«г
=
О
и
^^q = (V(T,/)-l-{V(T,b)Ueq = 0. (5.11)
Вычитав (5.11) из (5.10) при
<т — О
я вводя обозначения
получаем
« - Ueq,
=
{Va,b)uf.
<7=0
Напомним, что с такими уравнениями мы ранее уже имели дело и
анализировали их свойства при наличии неидеальности переключений.
188
Глава 5. Скользящие режимы высших порядков
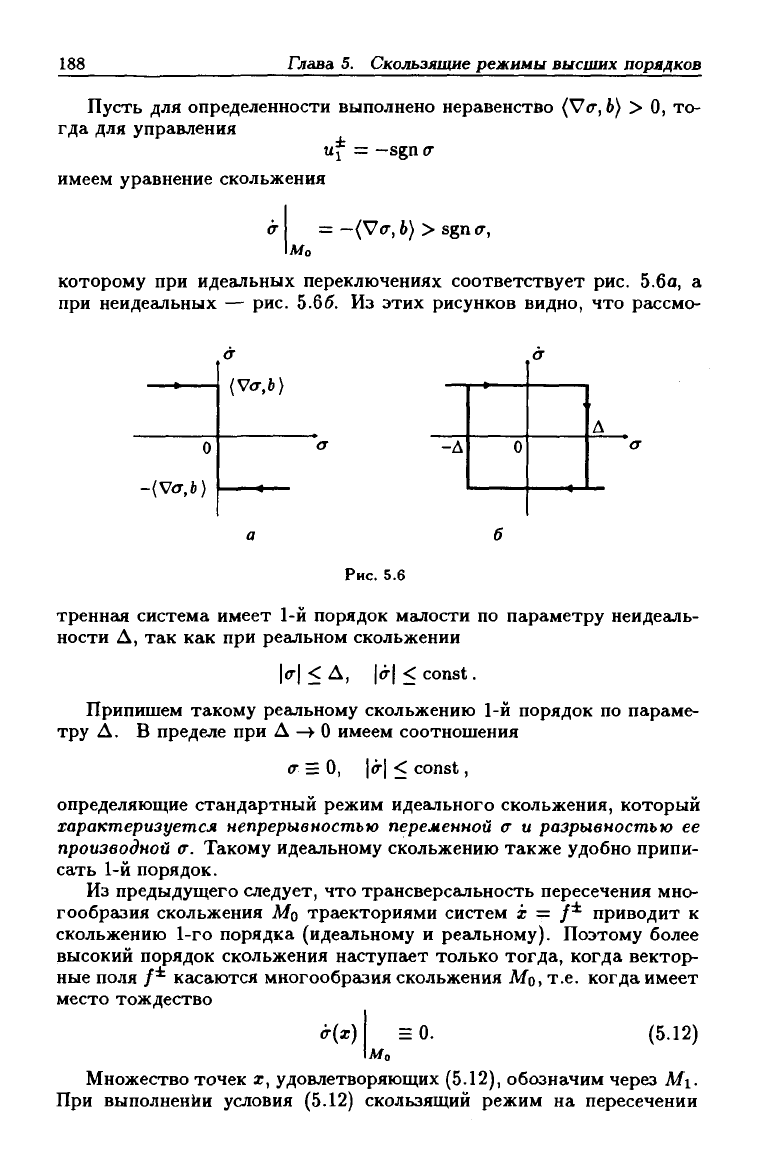
Пусть для определенности выполнено неравенство
(V(T,
6) > О, то-
гда для управления
—sgniT
имеем уравнение скольжения
= -{V<T,b) >sgn<r,
Mo
которому при идеальных переключениях соответствует рис. 5.6а, а
при неидеальных — рис. 5.65. Из этих рисунков видно, что рассмо-
0
-(Vo-,6)
(Va-,6)
а
-А
Рис.
5.6
тренная система имеет 1-й порядок малости по параметру неидеаль-
ности Д, так как при реальном скольжении
\сг\
< А,
\&\
< const.
Припишем такому реальному скольжению 1-й порядок по параме-
тру Д. В пределе при Д
—> О
имеем соотношения
<т
= О, jo"! < const,
определяющие стандартный режим идеального скольжения, который
характеризуется непрерывностью переменной
<т
и разрывностью ее
производной а. Такому идеальному скольжению также удобно припи-
сать 1-й порядок.
Из предыдущего следует, что трансверсальность пересечения мно-
гообразия скольжения MQ траекториями систем i = /* приводит к
скольжению 1-го порядка (идеальному и реальному). Поэтому более
высокий порядок скольжения наступает только тогда, когда векторь
ные поля /* ка^саются многообразия скольжения Мо, т.е. когда имеет
место тождество
сг(х)
= 0.
Мо
(5.12)
Множество точек х, удовлетворяющих (5.12), обозначим через Mi.
При выполнении условия (5.12) скользящий режим на пересечении
5.1.
Предварительные
сведения
189
Mo n Ml может возникнуть, если разрывна и знакопеременна вторая
производная
ir =
(V<7,
/±) =
(V<T,
/> + {V&, 6)u±,
т.е.
(V<T,
6) ^
О
на Mo n Ml.
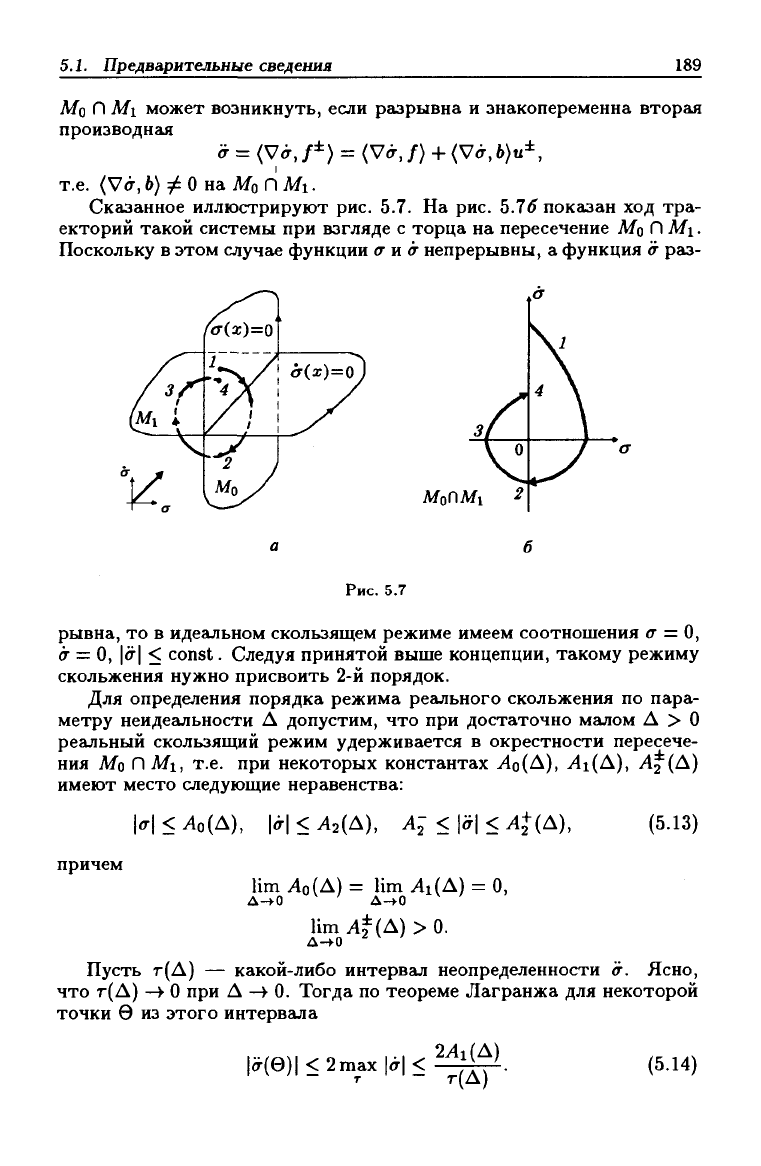
Сказанное иллюстрируют рис. 5.7. На рис. 5.75 показан ход тра-
екторий такой системы при взгляде с торца на пересечение
MQ
П
MI
.
Поскольку в этом случае функции а и
&
непрерывны, а функция ir раз-
МоПМг 2
Рис. 5.7
рывна, то в идеальном скользящем режиме имеем соотношения
<т
= 0,
(7 = О, |<г| < const. Следуя принятой выше концепции, такому режиму
скольжения нужно присвоить 2-й порядок.
Для определения порядка режима реального скольжения по пара-
метру неидеальности Д допустим, что при достаточно малом Д > О
реальный скользяш;ий режим удерживается в окрестности пересече-
ния Мо П Ml, т.е. при некоторых константах Ло(Д), Л1(Д), Лз (Д)
имеют место следующие неравенства:
\а\<Ао{А),
И<Л2(Д), А- <\&\<А+{А),
(5.13)
причем
Ит Ло(Д) = lim Л^Д) = О,
д->о д-».о
lim Л^(Д)>0.
д->о ^ ^ '
Пусть г(Д) — какой-либо интервал неопределенности а. Ясно,
что г(Д)
—> О
при Д
—>
0. Тогда по теореме Лагранжа для некоторой
точки в из этого интервсша
|t^(0)|
<2max|<r| <
2Л1(Д)
г(Д) •
(5.14)
190 Глава 5. Скользящие
режимы
высших порядков
Аналогично, для того же интервала находим для некоторого 6'
\<т{е')\
<2max|<r| <
2Ао{А)
г(Д) •
(5.15)
Из сопоставления (5.13), (5.14) и (5.15) находим, что
AI~0{T),
А2^0{Т^),
и если г ~ 0(A), а это, как правило, имеет место, то
Ai ~ 0(A), А2 ~ О(Д').
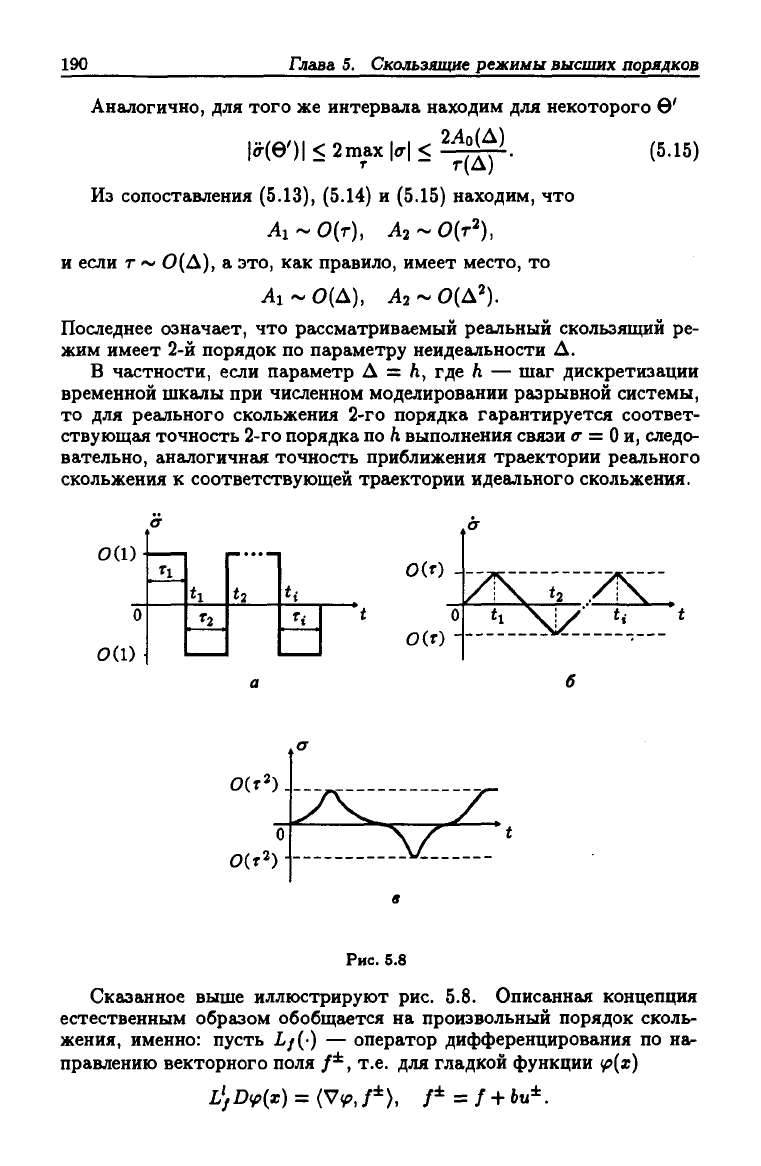
Последнее означает, что рассматриваемый реальный скользящий ре-
жим имеет 2-й порядок по параметру неидеальности Л.
В частности, если параметр А = h, где h — шаг дискретизации
временной шкалы при численном моделировании разрывной системы,
то для реального скольжения 2-го порядка гарантируется соответ-
ствующая точность 2-го порядка по
Л
выполнения связи
о-
=
О
и, следо-
вательно, аналогичная точность приближения траектории реального
скольжения к соответствующей траектории идеального скольжения.
0(1)-
0
0(1)
п
*1
Г2
«2
ti
и
О(т^)
О(г')
у^"--у-^
:хг
Рис.
5.8
Сказанное выше иллюстрируют рис. 5.8. Описанная концепция
естественным образом обобщается на произвольный порядок сколь-
жения, именно: пусть Lf(-) — оператор дифференцирования по на-
правлению векторного поля /*, т.е. для гладкой функции ip(x)
L'jD<p(x) = (V<p,f'^), /± = /-h6u±.