Емельянов С.В. Новые типы обратной связи
Подождите немного. Документ загружается.

6.3.
Статическая операторная обратная связь
211
Наконец, если, как и ранее, для удобства сначала ввести обозначение
а*
= а- d\
а затем, для простоты, "звездочку" не указывать (т.е. осуществить
замену а* -^ а), то окончательно уравнения движения исследуемого
объекта в 0-теории принимают вид
XI =-{d +
р)х1
+ (хи (6.7)
i =
2{d +
p)^ +
bfi
+ a-2dp +
p,
а€А,ЬеВ. (6.8)
Далее этот объект (6.7), (6.8) для удобства обозначаем символом
Pp.
Если же рассматривается только второе уравнение Рр-объекта
(6.8),
то его, как условлено выше, обозначаем символом Pg.
Из уравнений (6.7), (6.8) виден нелинейный, точнее билинейный,
характер уравнений движения (это обстоятельство принципиально и
неоднократно отмечалось выше), но, что важно и что обеспечивает
успех всего мероприятия, так это аффинность уравнений движения
по управлению (т.е. по паре
{fA,p)).
Последнее позволяет применять
для решения задачи стабилизации методы классической теории ста-
билизации.
6.3.
Статическая операторная обратная связь
Рассматривая уравнение Ре-объекта
i =
2{d
+ p)^ + bn + a-2dp + p,
аеА,
be В,
нетрудно понять, что обратная связь р = Rp/л может быть статиче-
ской или динамической, в зависимости от вида оператора Rp, однако
только во втором случае ввиду наличия производной р в правой части
(6.8) КО-связь fi =
R^CTp
может быть разрывной.
Исследование естественно начать с анализа возможностей отрица-
тельной статической 0-связи, когда
р
= -qfi, (6.9)
где q >
О
— коэффициент усиления 0-связи. Имеем в результате
следующие уравнения движения:
XI = -{d-qn)xi+ixi,
i = 2{d-qn)i-{-bn-\-a-qix, (6.10)
6 = 64-
2Qd.
212 Глава 6.
Теория операторной обратной
связи
После выбора оператора 0-свяэи Rp =
—д
свободным остается вы-
бор оператора КО-связи R^. Применяя разные операторы R^, по-
лучаем варианты бинарной системы управления с 0-связью. Есте-
ственно начать рассмотрение с простейших вариантов выбора опера-
тора R^.
6.3,1.
Статические операторная
и координатно-операторная обратные связи
При использовании статической КО-связи
fi = —Ц, к = const >
О
второе уравнение движения в (6.10) принимает вид
^ = 2(d
-Ь
дН)^ - Щ
+
gki
+
а.
После приведения подобных и выделения главной части имеем сле-
дующее линейное уравнение:
если, конечно, 1 > дк. При выполнении неравенства
(6-
-I-
2gd)k > 2d
уравнение асимптотически устойчиво и предельное (т.е. установив-
шееся) значение переменной ^(t) определяется выражением
а а
^~ ^ (6
-I-
2gd)k - 2d ^ bk-2d(l-gk)' ^^'^^^
Ошибка ^оо определяет статическую 0-ошибку, которая порождает
динамический статизм в основном контуре.
Поскольку в пределе основная переменная удовлетворяет уравне-
нию
XI = -{d + gk^oo)xi +
^00^1
= -[d+{qk- l)^^]xi,
то величина упоминавшегося динамического статизма дается следую-
щим выражением:
_ а{1-дк)
^°°
Ьк
- 2d(l - дк)
•
Стоит заметить, что статическая ошибка в системе (6.10) без О-
связи (т.е. при 9 = 0) определяется выражением
а
^оо =
bk-2d'
из сравнения которого с (6.11) следует, что в бинарной системе с О-
связью заданная величина динамического статизма достигается при
6.3.
Статическая операторная обратная
связь 213
меньшем значении параметра к, нежели в бинарной системе без О-
связи. Это немедленно следует из того, что
1 l-qk
>
bk-2d bk- 2d{l - qk)'
Действительно, после освобождения от знаменателей имеем сна-
чала, что
{Ьк
- 2d) + 2dqk > {bk - 2d) - qk{bk - 2d),
а после приведения подобных получаем тривиальное неравенство
О
> -qbk^.
Более того, поскольку динамический статизм
l-qk
С(9) =
bk-2d(l-qk)
монотонно убывает с ростом параметра q, то величина динамического
статизма ^^(з) может быть сколь угодно приближена к нулю при
gfc -> 1, хотя нуль недостижим, ибо при g = О все эти уравнения не
действуют. Следовательно,
• использование статической 0-связи оправдано даже в том триви-
альном случае, когда применяются только статические нелинейные
обратные связи.
Для содержательной интерпретации последнего вывода полезно по-
лучить выражение для закона управления по основной переменной,
т.е.
закона, выраженного через исходные переменные Xi, х^. Делая
обратную замену ц = —к^ и используя равенство р = —qfi, имеем по-
следовательно :
ы
= /ill = -k^xi = -ксгр = -к[х2 + (d+ p)xi] =
= -k[x2 + {d- qfi)xi ] = -k{x2 + dxi) + qkpxi
—
-kcr + qku.
Разрешая последнее равенство относительно управления и, находим,
что
ifc
u=-
-а, а = xi + dxi.
l-qk
Иными словами, построенная нелинейная бинарная система упра-
вления на множестве Gs эквивалентна линейной с коэффициентом уси-
ления
и при qk
—¥
—I нг1ступает эффект большого коэффициента усиления,
хотя во всех контурах системы управления применяются конечные ко-
эффициенты усиления. Этот эффект является прямым результатом
использования нелинейности и положительной обратной связи.
214
Глава 6. Теория
операторной обратной
связи
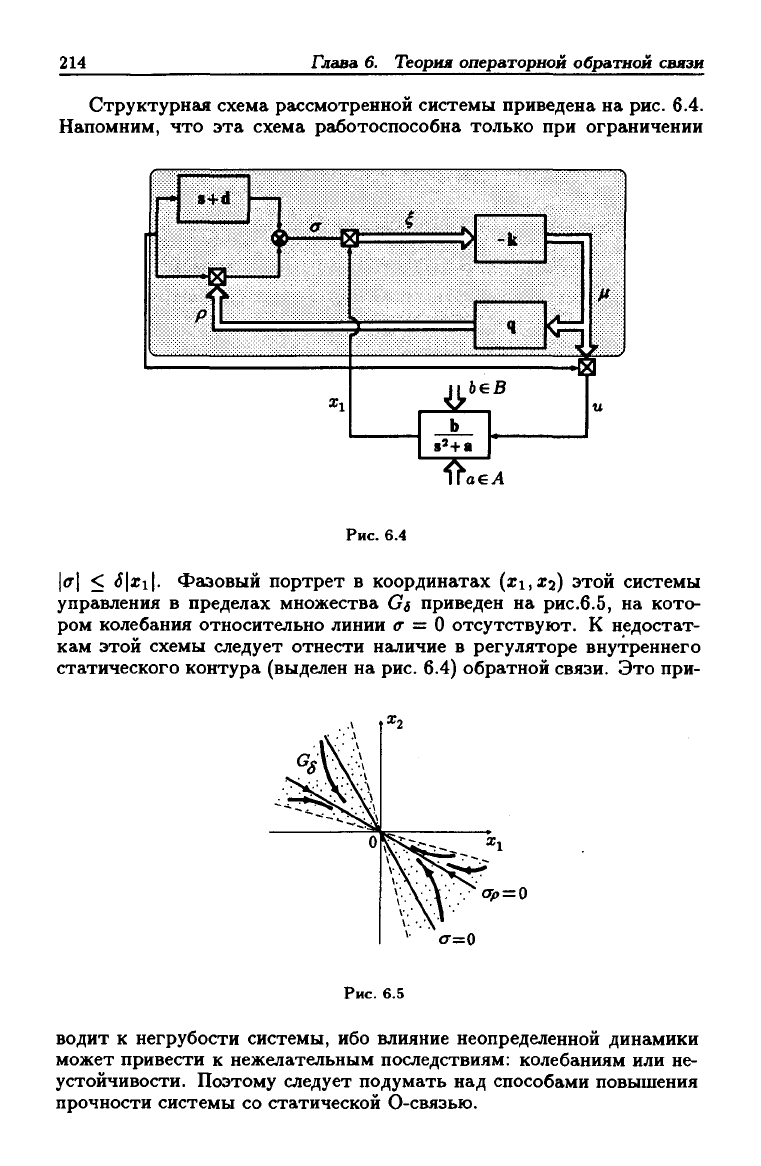
Структурная схема рассмотренной системы приведена на рис. 6.4.
Напомним, что эта схема работоспособна только при ограничении
р »+d —1
a^i
р==Ф -к =:
•»
а ("—
f ^~]
b
\м
и
Wa
sA
Рис. 6.4
\<т\
<
6\xi\.
Фазовый портрет в координатах (xi.xj) этой системы
управления в пределах множества Gs приведен на рис.6.5, на кото-
ром колебания относительно линии «г =
О
отсутствуют. К недостат-
кам этой схемы следует отнести наличие в регуляторе внутреннего
статического контура (выделен на рис. 6.4) обратной связи. Это при-
'• ст=0
Рис. 6.5
ВОДИТ К негрубости системы, ибо влияние неопределенной динамики
может привести к нежелательным последствиям: колебаниям или не-
устойчивости. Поэтому следует подумать над способами повышения
прочности системы со статической 0-связью.
6.3.
Статическгм операторная обратная
связь
215
6.3.2. Статическая операторная и динамическая
координатнсьоператорная обратные связи
Изучим теперь возможность стабилизации Ре-объекта
i = 2{d + p)i-\-bn-¥a- 2dp + p,
аеА,
b€B,
с помощью статической 0-связи
р = —qfi, q = const,
и различных видов динамической К 0-связи
/1
= R^a,
где R^ — дифференциальный, интегральный или какой-либо иной опе-
ратор динамического преобразования.
После исключения р получаем уравнение стабилизируемого объ-
екта, зависящее только от КО-закона управления в следующем виде:
^ = 2(d-qfi)^ +
biJi
+
a-qtt,
b =
b
+ 2qd.
(6.12)
Прежде всего рассмотрим случай, когда используется координатно-
операторная связь другого вида.
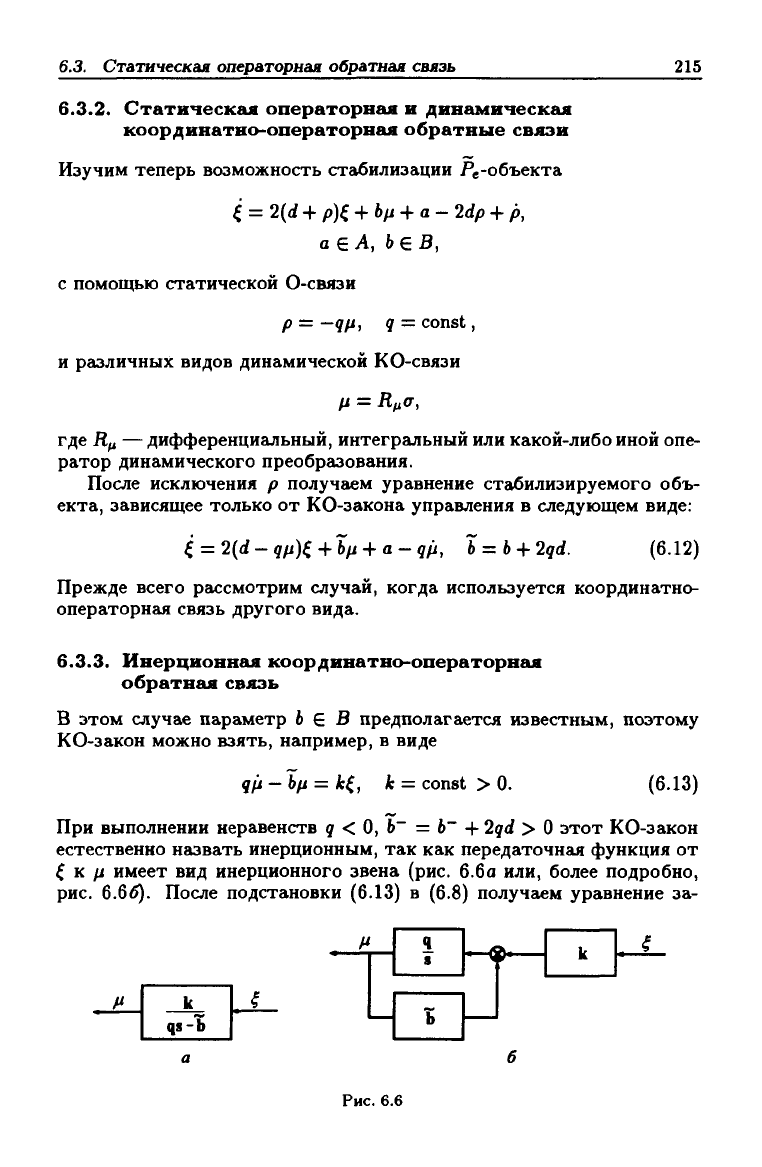
6.3.3. Инерционная координатно-операторная
обратная связь
В этом случае параметр b Е В предполагается известным, поэтому
КО-закон можно взять, например, в виде
qfi
—
bfi = к^, к = const > 0.
(6.13)
При выполнении неравенств g < О, 6~ = Ь~
-I-
2qd >
О
этот КО-закон
естественно назвать инерционным, так как передаточная функция от
^ к ц имеет вид инерционного звена (рис. 6.6а или, более подробно,
рис.
6.66). После подстановки (6.13) в (6.8) получаем уравнение за-
к
qs-b
^
М
Рис. 6.
q
S
b
6
• Л^^
•^ Л
*-•
б
к
4
216 Глава 6. Теория
операторной обратной
связи
мкнутой системы в виде
qfi-b~
к^.
В положении равновесия (/iooi^oo) этой системы выполнены равенства
2(d-?^ioo)^oo +а = к^оо,
разрешая которые с точностью до величин порядка 1/к получаем
а к п
с ~ ,, с^
400 — , „ji А*оо — ~
к-2d' '^^ bk-2d
Для анализа устойчивости этого положения равновесия в матом
запишем уравнения движения системы (6.14) в отклонениях
6=^-^оо,
Ь = И-Иоо,
удерживая лишь члены первого порядка малости. После элементарных
преобразований получим уравнения
6 = -(fc-2d)6, 6 =-6+ -6,
Ч Я
из анализа которых легко усмотреть, что точка (/ioo,^c») асимптоти-
чески устойчива, если
k>2d,
b = b + 2qd>0.
Для определения предельного движения основной координаты xi
воспользуемся первым уравнением системы (6.10). Получаем
XI = -(d - qfioo)xi +^00^1 = -{d-qHoo
-^00)^1-
Следовательно, число
определяет в этом случг1е величину статизма. Устремлением параме-
тра ^: -^ 00 устранить этот статизм невозможно, так как
г е* -^ - °g
к^'^°°~ ь ~
b
+ 2qd'
Однако уменьшением параметра q его можно сделать произвольно ма-
лым, хотя устранить вовсе таким путем нельзя, так как q > 0.
6.3.
Статическая операторная обратная
связь
217
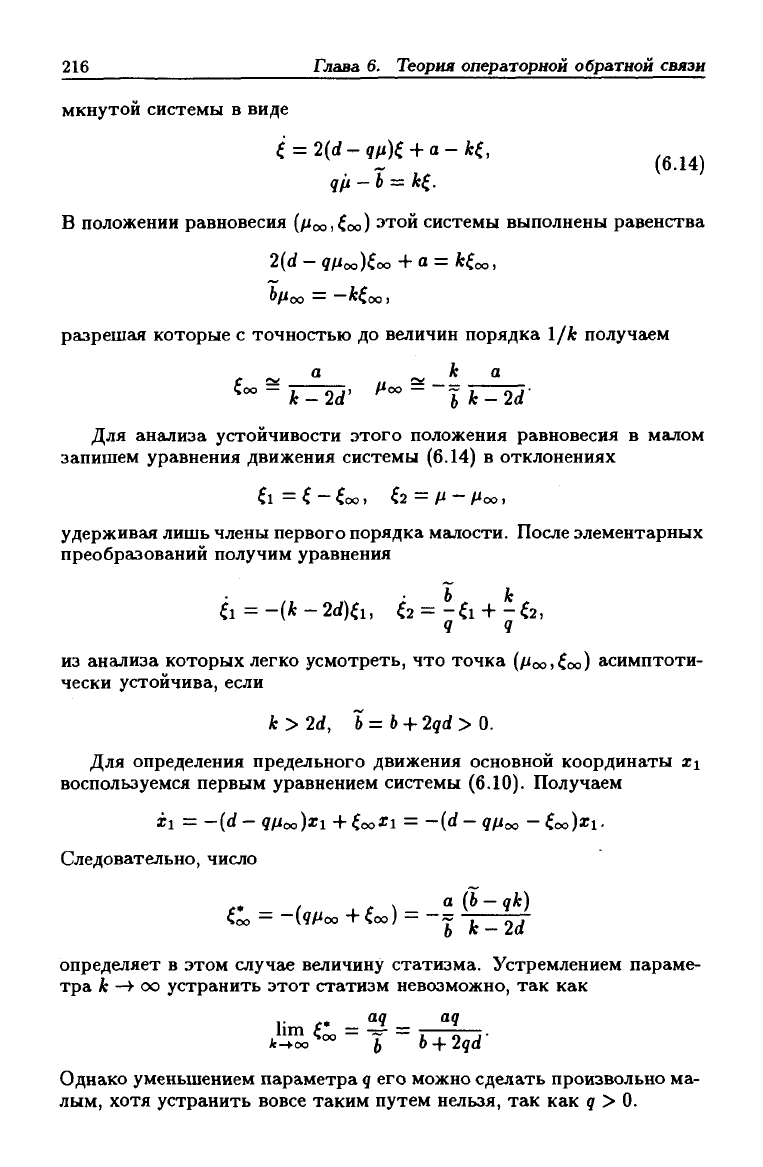
Структурная схема исследованной системы стабилизации приве-
дена на рис. 6.7. Напомним, что она действительна только при огра-
ничении
\<т\
< S\xi\. Рисунок с проекциями фазовых траекторий этой
s + d
^-2-^=J=
^ qs-Ъ
' Ф=^
ё
$•'+«
1ГоеЛ
Рис. 6.7
системы на множество Gs в плоскости («1,352) подобен рис. 6.5 и по-
этому не приводится. i
Поскольку прочность этой системы из-за наличия динамики в 0-
контуре не вызывает сомнений, то можно констатировать, что
• в рассмотренной бинарной системе поставленная задача стабилиза-
ции решается непрерывным управлением сколь угодно точно и ко-
лебания фазового вектора относительно линии
<т
=
О
отсутствуют.
Однако для реализации требуется знать параметр 6 £ JB, да и сама
реализация сложна, так как требует операции деления. Для преодо-
ления этих недостатков рассмотрим иной вид КО-связи.
6.3.4. Инерционно-релейная
координатно-операторная обратная связь
Вновь будем считать параметр 6 € S известным и определим КО-
связь уравнением вида
qft
—
bfi = кsgn^,
А:
= const > 0. (6.15)
При замыкании такой обратной связью Ре-объекта
i = -2{d-qn)^+'b,i-i-a-qfi
получаем замкнутую систему стг^билизации со следующим уравнением
движения:
^ = 2{d - qfi)^-кsgni +а. (6.16)
218
Глава 6.
Теория операторной обратной
связи
Удобство КО-закона (6.15) состоит в том, что при g < О пере-
менная fi автоматически ограничивается по модулю, что, безусловно,
полезно, так как и = fixi и в главном контуре управления перемен-
ная ц выполняет функцию коэффициента усиления, который, как из-
вестно, по соображениям прочности нужно ограничивать. Отметим,
что этого эффекта не было в других системах с рассмотренными КО-
законами, и в них это ограничение нужно обеспечивать специально.
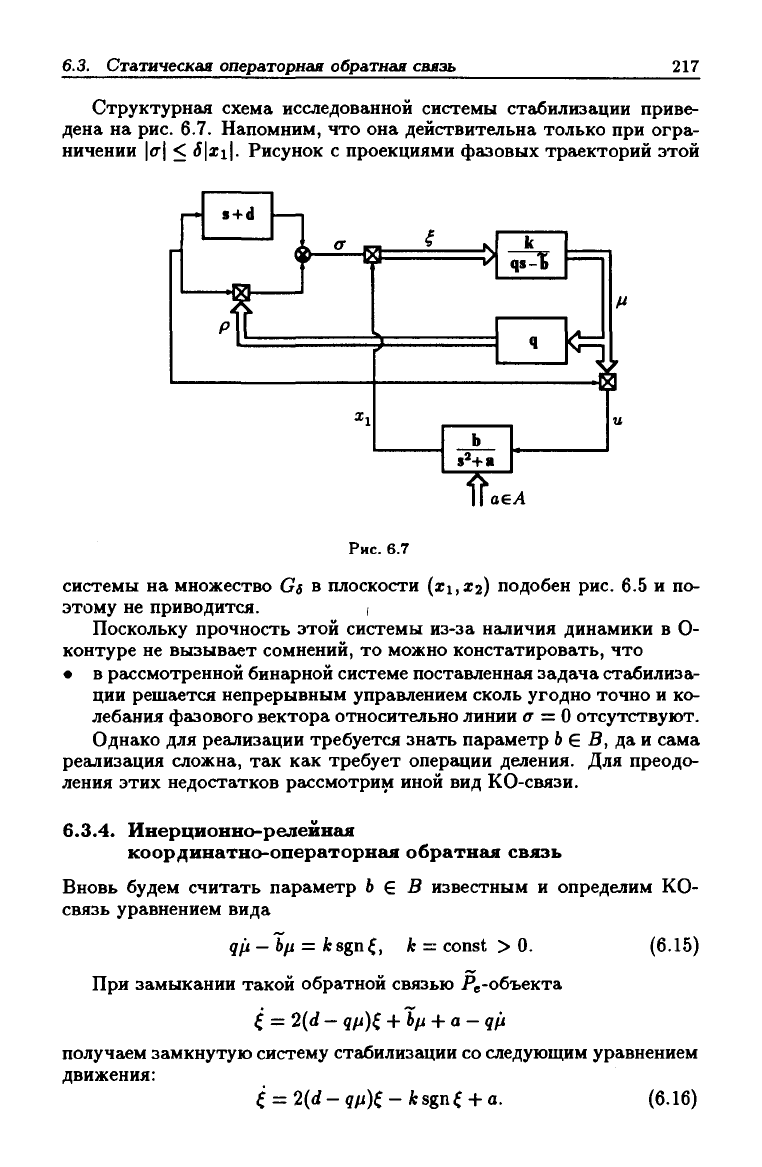
Подробнее об этом позже, а сейчас приведем структурную схему,
объясняющую название закона (рис. 6.8). Поскольку переменная fi
Рис. 6.8
ограничена, то из анализа уравнения (6.16)
очевидно, что при достаточно большом значении параметра
ifc,
именно
к > а, в точке ^ =
О
возникает скользящий режим. Для определения
уравнения движения в скользящем режиме сначала из уравнений ( = О,
^ =
О
находим эквивалентное значение разрывного элемента
затем найденное значение подставляем в уравнение (6.15) изменения
переменной
(л
и получаем следующее уравнение движения:
qfi
— bfi
= а.
(6.17)
Это уравнение устойчиво при g <
О
и при фиксированном параметре
а имеет положение равновесия
/*<» = -а/Ь-
Теперь можно установить уравнения движения системы в сколь-
зящем режиме. Поскольку при ^ = О для основной переменной xi
действует уравнение
XI =-{d - qii)xi, (6.18)
то в скользящем режиме это уравнение должно быть дополнено урав-
нением (6.17). Если, однако, параметр q достаточно мал, то можно
считать, что fi{t) 2 ^оо, и уравнение (6.18) упрощается (используем
замену 6 = 6-1- 2ad) до следующего уравнения:
XI = -{d - qiioo)xi = -{d-\-qa/b)xi.
6.3.
Статическая операторная обратная
связь
219
Из последнего уравнения, в частности, следует, что динамический
статизм определяется равенством
и может быть сделан сколь угодно малым путем уменьшения параме-
тра q. При этом статизм неустраним вовсе, ибо значение 9 = О не
допускг^ется. Поэтому проекция хода фазовых трг1екторий этой си-
стемы на множество Gs в плоскости (х\,Х2) подобна изображенной
на рис. 6.5-
Для пояснения физического эффекта, эксплуатируемого в рассма-
триваемой системе стабилизации, полезно записать алгоритм стаби-
лизации в исходных переменных. Поскольку в скользящем режиме
^ = О, а
<Тр
= ixi, то и (Т^ = 0. Но « = /xii, и, следовательно,
<Тр
= xi-\- dx\
—
qfixi =
<r
—
qu = 0.
Таким образом, имеет место равенство и = tr/q, которое означает, что
в скользящем режиме исследуемая нелинейная обратная связь эквива-
лентна линейной с коэффициентом усиления 1/q, который может быть
сделан сколь угодно большим q
—> —О,
что и обеспечивает решение за-
дачи стабилизации.
чм-ьм
о-=0
к —»
О
чм-ьм
2Д(г)
Рис.
6.9
Рис.
6.10
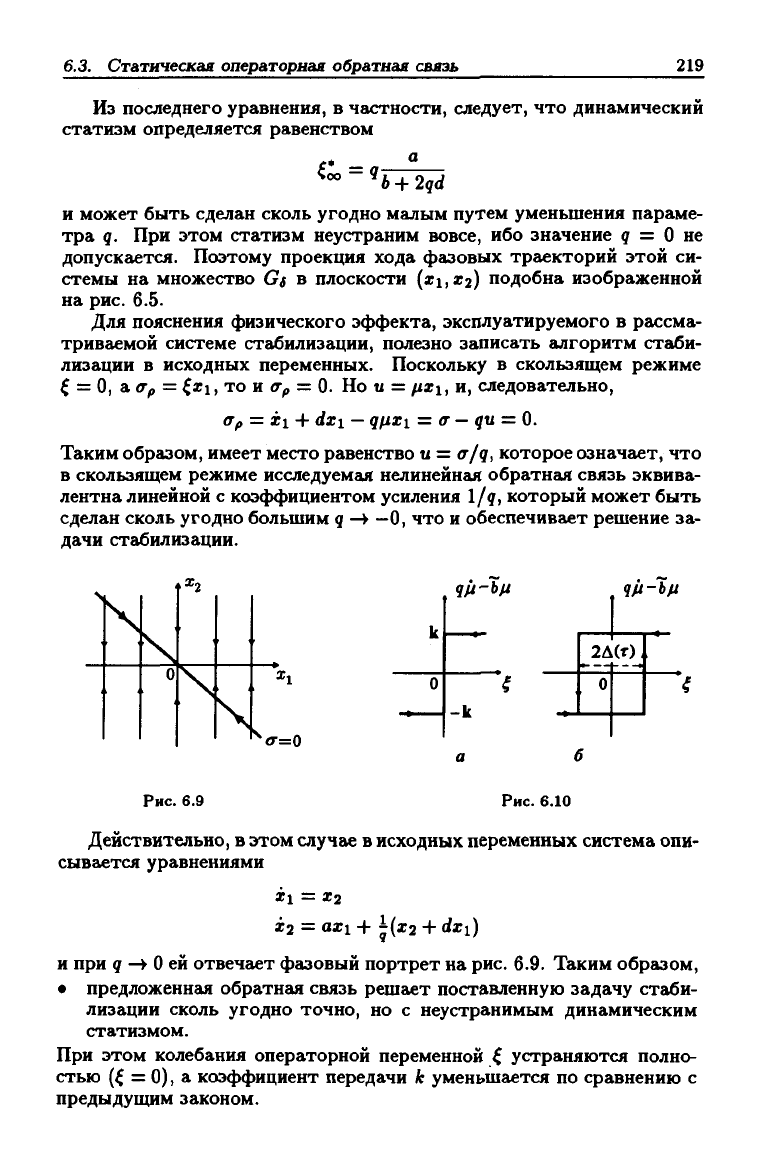
Действительно, в этом случае в исходных переменных система опи-
сывается уравнениями
XI = Х2
Х2 = axi + i(x2 + dxi)
и при g -> о ей отвечает фазовый портрет на рис. 6.9. Таким образом,
• предложенная обратная связь решает поставленную задачу стаби-
лизации сколь угодно точно, но с неустранимым динамическим
статизмом.
При этом колебания операторной переменной ^ устраняются полно-
стью (^ = 0), а коэффициент передачи к уменьшается по сравнению с
предыдущим законом.
220
Глава 6. Теория
операторной обратной
связи
Нетрудно также понять, что эта система прочна. В самом деле,
пусть имеется запаздывание г > О в переключениях, т.е. вместо за-
кона (6.15) имеем дело с КО-законом вида
q^
—
bfi = к sgn
т
^,
/г
= const > 0.
(6.19)
В координатах (g/i
—
bfi,^) уравнениям (6.15) и (6.19) соответствуют
графики на рис. 6.10, откуда немедленно следует оценка |^| < Д(г),
что и означает прочность системы, так как Д('')
—> О
при г -> 0.
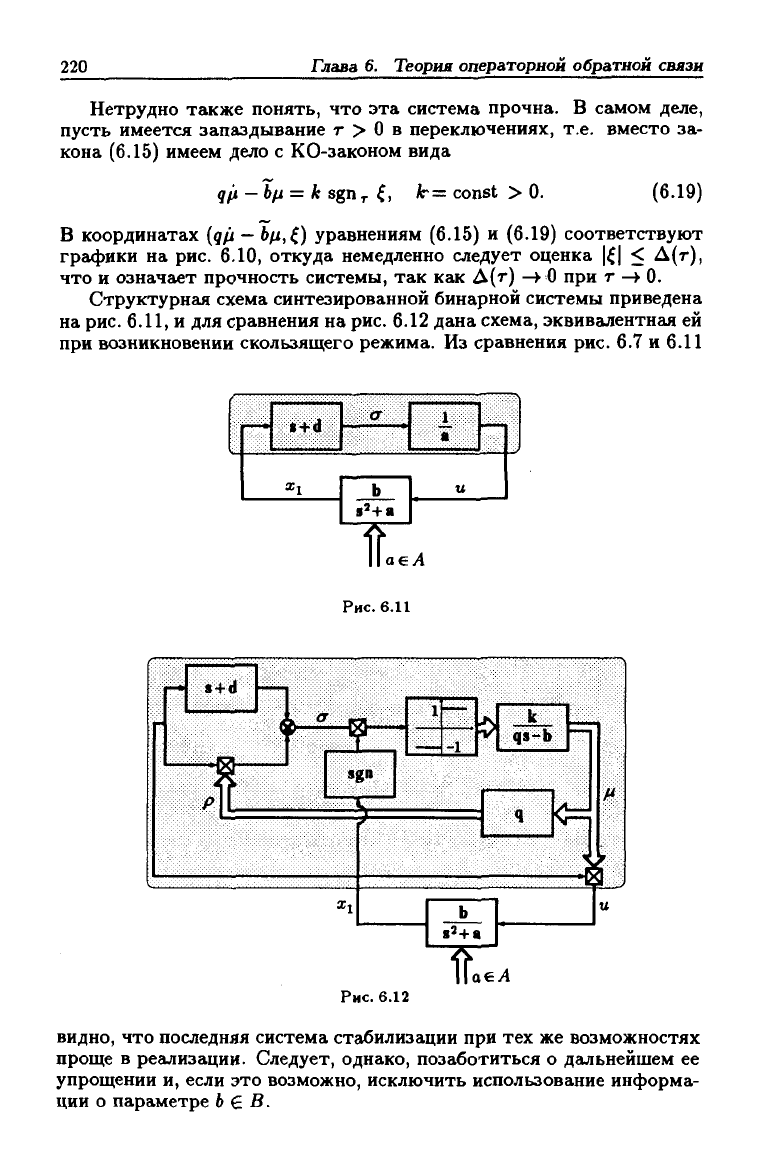
Структурная схема синтезированной бинарной системы приведена
на рис. 6.11, и для сравнения на рис. 6.12 дана схема, эквивалентная ей
при возникновении скользящего режима. Из сравнения рис. 6.7 и 6.11
/
t+d
Xi
or
b
1
'
u
НаеЛ
Рис.
6.11
Рис.
6.12
видно, что последняя система стабилизации при тех же возможностях
проще в реализации. Следует, однако, позаботиться о дальнейшем ее
упрощении и, если это возможно, исключить использование информа-
ции о параметре 6 6 В.