Емельянов С.В. Новые типы обратной связи
Подождите немного. Документ загружается.

5.2.
Алгоритмы скольжения
2-го
порядка
191
При кратном применении этого оператора имеем равенство
L'f(p
= Lf {Ь'г
^(р),
I —
целое число.
Заметим, что в тех случаях, когда это имеет смысл, между произ-
водными по времени функции (х(х) и системой х = f{x) справедливо
следующее равенство:
dfc
Пусть при последовательном дифференцировании функции
<т{х)
и
все ее производные до порядка (г
—
1) включительно непрерывны, а
г-я производная
о-^'')
=
IJ(T
разрывна и знакопеременна. Тогда, если
пересечение
Mr =
Мо П
Ml П ...
П
Мг_1,
где
М, = {I|<T(')(X) = 0}, / =
0,1,...,Г-1.
не пусто, то оно является многообразием идеального скольжения по-
рядка г.
Если, кроме того, при реальном скольжении обеспечено выполне-
ние следующих неравенств для / = 0,1,
...,г—1:
|<г(')|<Л(Д), кМ|<Лг(Д), >lr(A)>const >0,
где А — параметр, характеризующий неидеальности переключений,
то точность реального скольжения по
(г
имеет порядок Д', так как
к(')|^0(дг-'), / =
0,1,...,г-1.
5.2.
Алгоритмы скольжения 2-го порядка
Рассмотрим некоторые алгоритмы скольжения 2-го порядка.
Прежде всего уточним математическую модель, с которой пред-
стоит иметь дело. Вновь рассмотрим гладкое многообразие
Мо = {х I
<т{х)
= 0}.
Поведение в его окрестности 0(Мо) разрывной системы
х = f +
bu"^
можно изучать по скалярному уравнению вида
«r
= (V<r,/)-KV(T,6)«±. (5.16)
Пусть Ueq — решение для х € 0{Мо) уравнения
0 = <V(T,/>-»-(V«r,6>Ueq, (5.17)
192 Глава 5. Скользящие
режимы
высших порядков
тогда, после вычитания (5.17) из (5.16), получим, что в окрестности
0{Мо) действует уравнение
Если обозначить правую часть последнего уравнения через и, то
тем самым изучение движений в окрестности 0(Мо) можно свести,
без ущерба для общности, к следующему стандартному уравнению:
& = и. (5.18)
Особенность такого уравнения при анализе скользящих режимов
2-го порядка состоит в том, что функция и непрерывна и такова,
что фазовые траектории исходной системы касаются многообразия в
точках скольжения 2-го порядка, иными словами, и обращается в нуль
на пересечении
MQDMI,
где,
как и раньше,
Mi = {x\ ff(z) = 0}.
Проблема стабилизации скалярного объекта (5.18) непрерывным
управлением сводится следующими заменами
к стандартной проблеме стабилизации в нуле объекта 2-го порядка
^' = ''" ''^ = "' (5.19)
(7 = (Ti,
обратной связью I/{(TI,(T2), которая при скольжении 2-го порядка мо-
жет быть и разрывной. Разумеется, наиболее привлекательны те
обратные связи I/(<TJ,<T2), которые финитно стабилизируют объект
(5.19) в нуле по выходу, однако не будем пренебрегать и асимпто-
тически стабилизирующими обратными связями по состоянию или по
выходу.
Описанная выше конструкция допускает естественное обобщение.
Так, проблема организации скользящего режима г-го порядка на мно-
гообразии
MQ
эквивалентна проблеме финитной стабилизации по вы-
ходу в нуле следующей системы г-го порядка:
о-,=(Г,+1,
i = 1,2, ... ,г-1,
(5.20)
(Тг = f,
<Т
= <Ti.
в самом деле, в этом случае в желаемом режиме имеем равенства
<т = 0-1 = 0-2 = ... = <Тг = О,
которые означают, что движение происходит по пересечению
МоПЛ/1 П...ЛЛ/г,

5.2. Алгоритмы
скольжения
2-го порядка 193
где,
как очевидно, множества М,- определяются следующими соотно-
шениями:
Mi = {x |<т<''){х) = 0}.
Порядок скользящего режима можйо связать с относительным по-
рядком исходного объекта по управлению, если за его выход принята
переменная
<т(х).
Проще всего и без потери в общности это можно по-
яснить на примере линейного стационарного объекта. Действительно,
пусть связь между входом и и выходом а объекта определена дробно-
рациональной передаточной функцией W{s) = p(s)/a{s) (рис. 5.9).
W(s)
Рис. 5.9
Тогда при относительном порядке единица, т.е. когда
dega(s) -deg/9{s) = 1,
производная
<т
может претерпевать разрывы, если управление и раз-
рывно и, следовательно, возможен скользящий режим 1-го порядка.
При условии, что
deg Q{S) - deg ^(s) = г,
функции ffC), I = 0,1, ... ,r
—
1 не зависят явно от управления, а
функция
ff^*"'
— зависит, и, следовательно, при разрывном управле-
нии и разрывы может претерпевать только
(т^''\
а значит, в системе
в принципе возможен скользящий режим не ниже г-го порядка. Та-
ким образом, порядок функции, задающей поверхность разрыва, по
управлению (т.е. номер первой производной Ли, явно зависящей от
управления) и определяет порядок скользящего режима, если, конечно,
последний устойчив.
Рассмотрим конкретные примеры алгоритмов скольжения 2-го по-
рядка подробнее.
5.2.1.
Асимптотические алгоритмы скольжения 2-го порядка
При решении задачи асимптотической стабилизации в нуле объекта
(Е-системы)
сначала исследуем возможности линейной обратной связи
и =-ki<Ti - к20-2. (5.21)
194
Глава 5. Скользящие режимы высших порядков
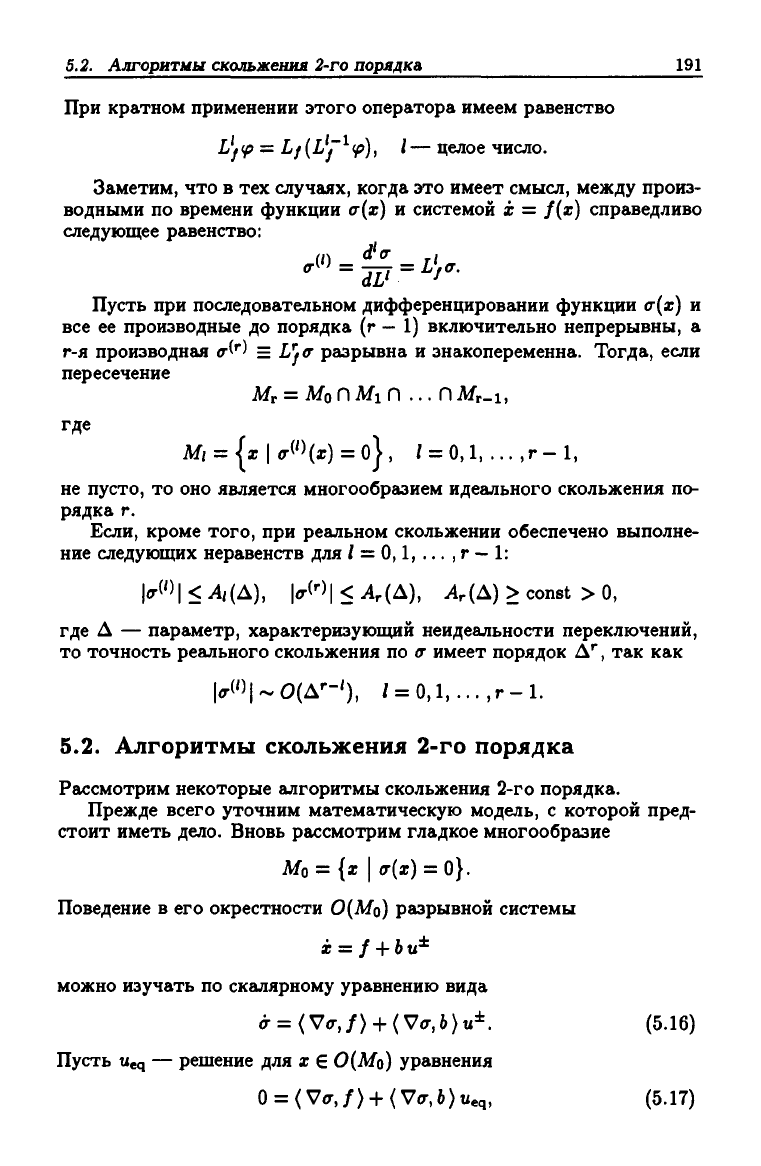
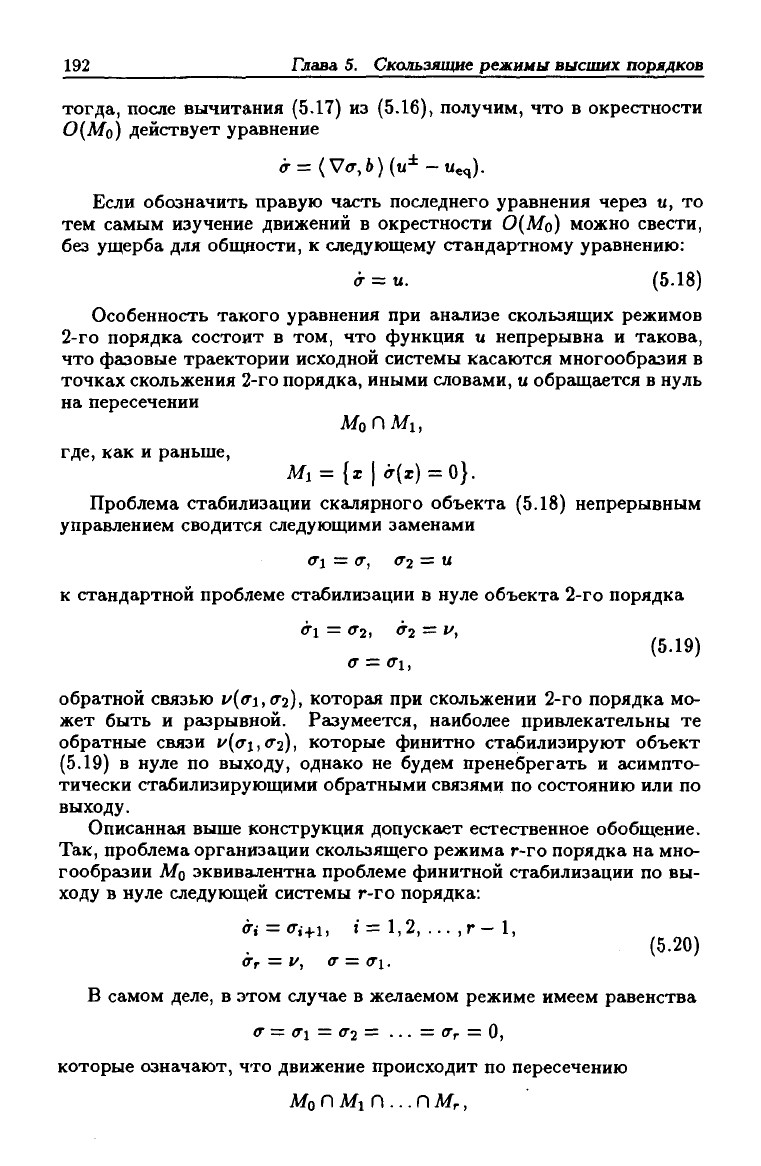
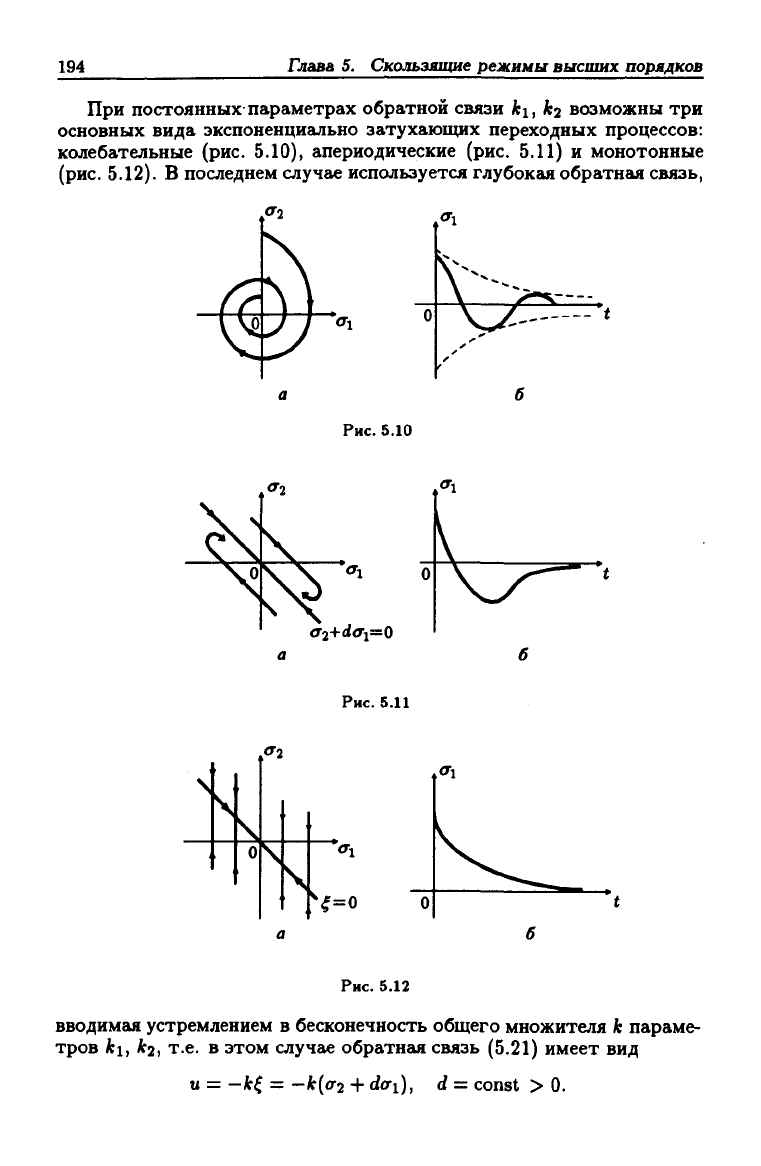
При постоянных параметрах обратной связи ку, ki возможны три
основных вида экспоненциально затухаюыщх переходных процессов:
колебательные (рис. 5.10), апериодические (рис. 5.11) и монотонные
(рис.
5.12). В последнем случае используется глубокая обратная связь.
Рис. 5.10
<T2+rf<Ti=0
Рис. 5.11
^=0
Рис. 5.12
вводимая устремлением в бесконечность общего множителя к параме-
тров ki, Аг2, т.е. в этом случг1е обратная связь (5.21) имеет вид
U
= -к^ = -к{(Г2 + dcri), d = const > 0.
5.2. Алгоритмы скольжения 2-го порядка
195
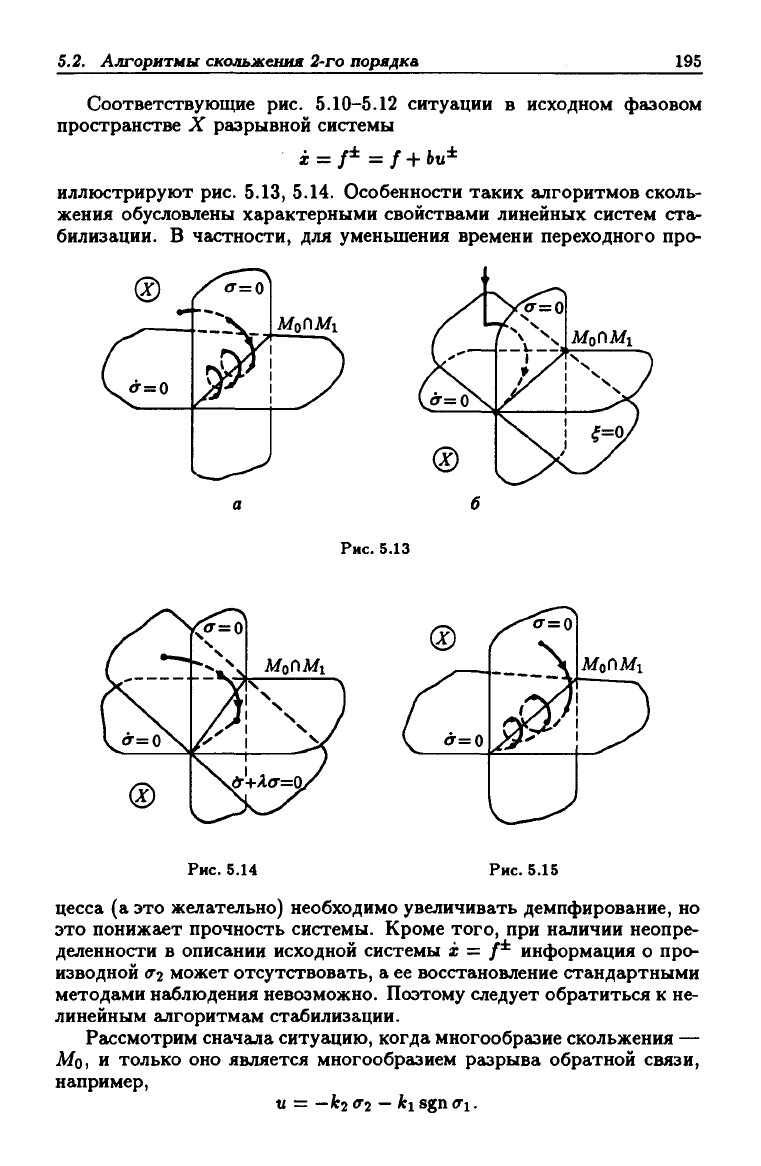
Соответствующие рис.
5.10-5.12
ситуации в исходном фазовом
пространстве X разрывной системы
i = /± = / +
Ьи=»=
иллюстрируют рис. 5.13, 5.14. Особенности таких алгоритмов сколь-
жения обусловлены характерными свойствами линейных систем ста^
билизации. В частности, для уменьшения времени переходного про-
Рис. 5.13
Рис. 5.14 Рис. 5.15
цесса (а это желательно) необходимо увеличивать демпфирование, но
это понижает прочность системы. Кроме того, при наличии неопре-
деленности в описании исходной системы i = /* информация о про-
изводной
(72
может отсутствовать, а ее восстановление стандартными
методами наьблюдения невозможно. Поэтому следует обратиться к не-
линейным алгоритмам стабилизации.
Рассмотрим сначала ситуацию, когда многообразие скольжения —
Мо,
и только оно является многообразием разрыва обратной связи,
например,
и = -к2
<Т2 —
fci
sgn а\.
196
Глава 5. Скользящие режимы высших порядков
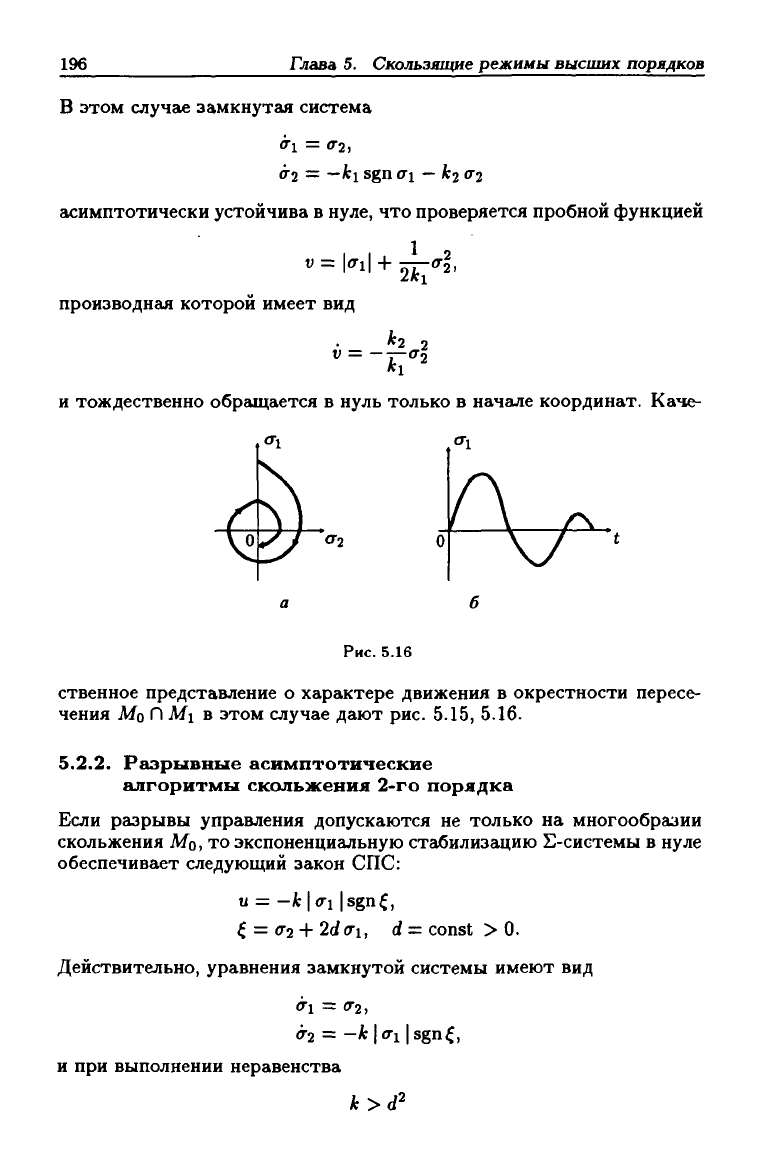
В ЭТОМ случае замкнутая система
&1
= (Г2,
{Г2 — —*1
sgn
ах
- ^2 сг
асимптотически устойчива в нуле, что проверяется пробной функцией
V = kil + 2Г^^'
производная которой имеет вид
^2 2
И тождественно обращается в нуль только в начале координат. Каче-
Рис. 5.16
ственное представление о характере движения в окрестности пересе-
чения Мо П Ml в этом случае дают рис. 5.15, 5.16.
5.2.2. Разрывные асимптотические
алгоритмы скольхсения 2-го порядка
Если разрывы управления допускаются не только на многообразии
скольжения Мо, то экспоненциальную стабилизацию Е-системы в нуле
обеспечивает следующий закон СПС:
и = -fc|<Ti|sgn^,
^ =
<Г2
+ 2</(Ti, d = const > 0.
Действительно, уравнения замкнутой системы имеют вид
&!
= <Т2,
&2
= -A;|<ri|sgn^,
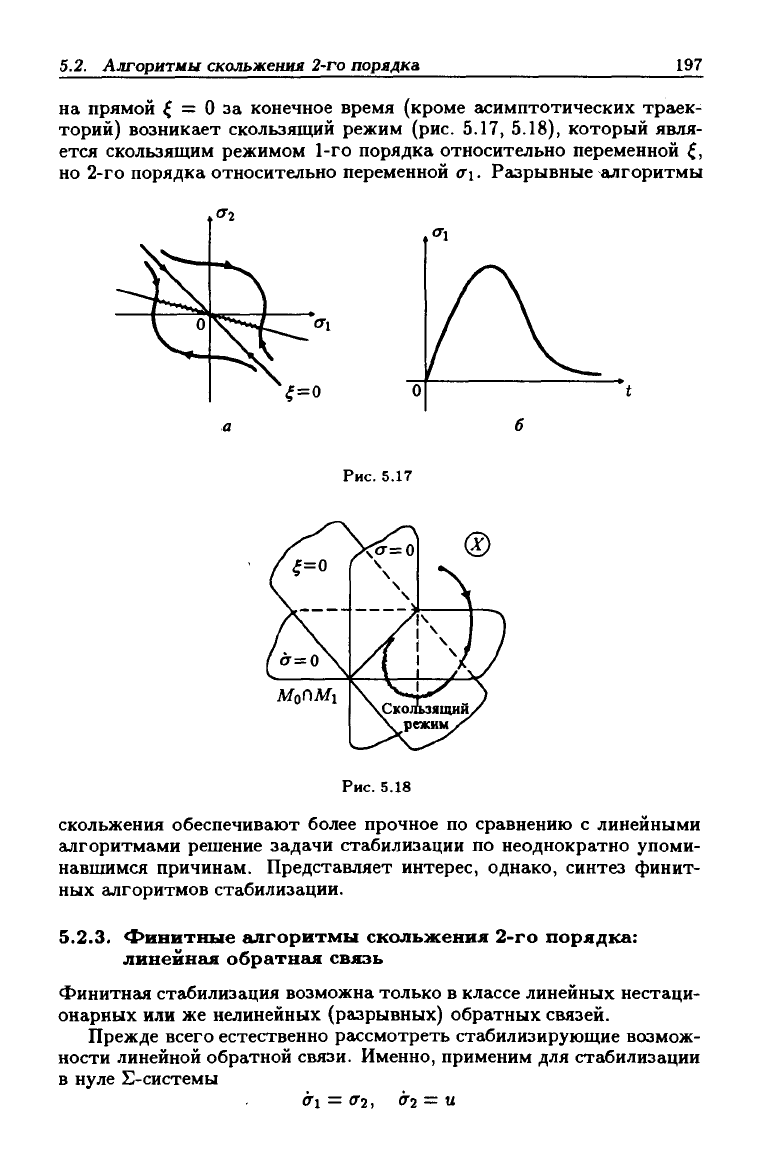
и при выполнении неравенства
k>d^
5.2. Алгоритмы
скольжения
2-го порядка
197
на прямой ^ = О за конечное время (кроме асимптотических траек-
торий) возникает скользящий режим (рис. 5.17, 5.18), который явля-
ется скользящим режимом 1-го порядка относительно переменной ^,
но 2-го порядка относительно переменной (Г\. Разрывные алгоритмы
Рис.
5.17
Рис.
5.18
скольжения обеспечивают более прочное по сравнению с линейными
алгоритмами решение задачи стабилизации по неоднократно упоми-
навшимся причинам. Представляет интерес, однако, синтез финит-
ных алгоритмов стабилизации.
5.2.3.
Финитные алгоритмы скользкения 2-го порядка:
линейная обратная связь
Финитнг^ стабилизация возможна только в классе линейных нестаци-
онарных или же нелинейных (разрывных) обратных связей.
Прежде всего естественно рассмотреть стабилизирующие возмож-
ности линейной обратной связи. Именно, применим для стабилизации
в нуле Е-системы
(Tj = (72, (72 = U
198
Глава 5.
Скользящие режимы высших
порядков
за конечное время
rj
>
О
линейную обратную связь с переменными па-
раметрами и =
—kW
= —iti<Ti—А:2<Г2, где для удобства введены векторы
к^ = {ki,k2) и ff = («Ti,«гг); здесь ^ — знак транспонирования.
Общее решение Е-системы дается формулой Коши
W{t) = е
tA
t
о
где матрица А и вектор 6 имеют вид
•тА
budr
л=[У.].
'=[?]
Положим
и(0 = -б"^е-'^ I,
где вектор I определяется из равенства ?(»j) = О, т.е.
(То =
V
!•
.0
-'•^ ЬЬ^е-"^
dr
l = W(0,v)l.
Поскольку Е-система управляема, то граммиан управляемости
W(0,T])
невырожден при любом »; > О, и поэтому / =
W~^(0,T))WO,
ЧТО и по-
зволяет найти управление, решающее задачу в виде "программы"
« = -6'е
т^-м^
W-\0,T,)Wo.
Для нахождения соответствующей обратной связи выразим <го из
равенства
а результат подставим в предыдущую формулу для и. Получим сле-
ду юхцую формулу:
и =
jTg-M w-^iO,r,)e
-tA
1-1^(0,0^^-40,»;) '
которая и определяет искомую обратную связь. Поскольку
W{0,t)W-\Q,r})^l
при t
—>
т;, то коэффициент обратной связи неограниченно возрастг1ет
за конечное время, т.е.
k(t) = -
-tA
l-W{0,t)W-^{0,T))
•ОС,
5.2. Алгоритмы
скольжения
2-го порядка
199
Последнее, конечно, неприемлемо в приложениях. Для явного вы-
ражения параметров Ari(t) и k2(t) через параметры Е-системы нужно
использовать следующие формулы:
6*"^ =
»'-'(».')= [б/.^ tt]- »v'-^
=
H,ii.
5.2.4. Финитные алгоритмы скольжения 2-го порядка:
релейная обратная связь
Рассмотрим теперь нелинейную обратную связь, которгш также обес-
печивает финитную стабилизацию, но ограничена при любых
«г.
Пусть
скалярная гладкая функция
д{<т)
такова, что д{0) = 0, д' д ограничена,
решение дифференциального уравнения а =
д(<т)
существует при лю-
бом (г(0) и это решение за конечное время попадает в нуль. Например,
такими свойствами обладает функция ^((г) = —dsgner
\(т\р,
0.5 < р <1,
d = const > 0.
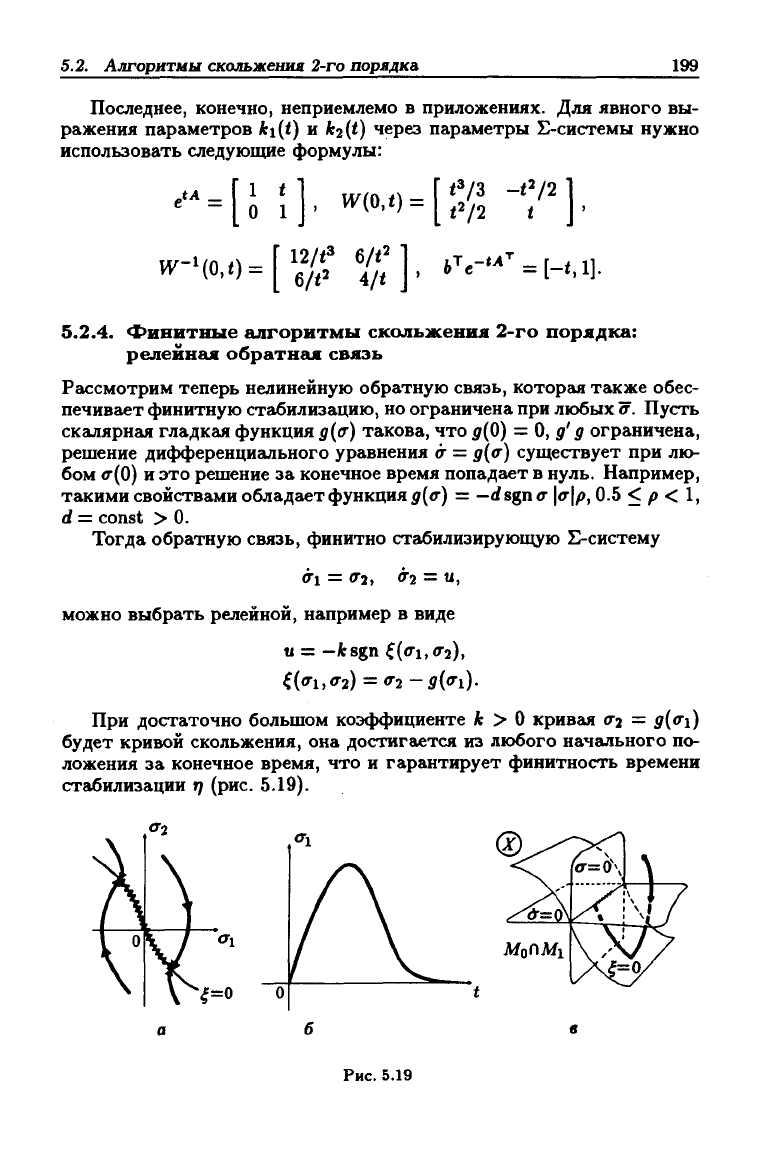
Тогда обратную связь, финитно стабилизирующую Е-систему
&1 = <Т2,
<^1
— U,
можно выбрать релейной, например в виде
« = -*sgn^(<ri,<r2),
При достаточно большом коэффициенте к > О кривая (Тг =
9{<''i)
будет кривой скольжения, она достига1ется из любого начального по-
ложения за конечное время, что и гарантирует финитность времени
стабилизации
г)
(рис. 5.19).
Рис.
5.19
200
Глава 5. Скользящие
режимы
высших порядков
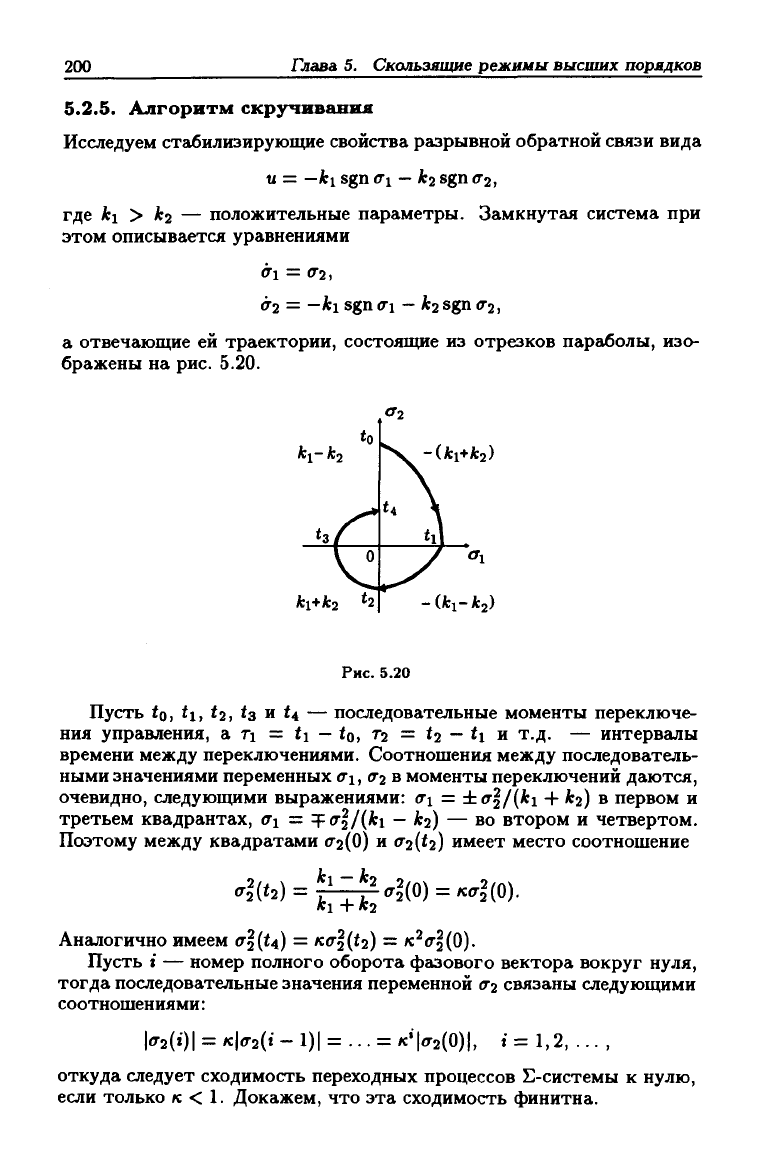
5.2.5. Алгоритм скручивания
Исследуем стабилизирующие свойства разрывной обратной связи вида
и = —ki Sgn
<Ti — к2 Sgn
(Т2,
где ibi > ^2 — положительные параметры. Замкнутая система при
этом описывается уравнениями
ffl = (Т2,
&2
= -ki sgn
(Ti
-
^2
sgn
ег2,
a отвечающие ей траектории, состоящие из отрезков параболы, изо-
бражены на рис. 5.20.
-iki+ki)
ki+k2 *2\ -(fci-Jkj)
Рис.
5.20
Пусть to, ti, t2, ta и t^ — последовательные моменты переключе-
ния управления, а ri = ti
—
to, Т2 = t2 — ti я т.д. — интервалы
времени между переключениями. Соотношения между последователь-
ными значениями переменных «ri,
(Тг
в моменты переключений даются,
очевидно, следую1Щ1ми выражениями: ai = ± (г\/{к\
-\-
Л2) в первом и
третьем квадрантах,
(Тх
= ^а^Ккх
—
^2) — во втором и четвертом.
Поэтому между квадратами (Т2(0) и (Т2((2) имеет место соотношение
'^2(M = ^^'-l(0) = 'e<Ti(0).
Аналогично имеем
a^{t\)
= Kal{t2) = к^а^О).
Пусть i — номер полного оборота фазового вектора вокруг нуля,
тогда последовательные значения переменной
а-2
связаны следующими
соотношениями:
к2(«)1 = «к2(« -1)1 =... = /с*к2(о)|, ,- =
1,2,...,
откуда следует сходимость переходных процессов Е-системы к нулю,
если только к < 1. Докажем, что эта сходимость финитна.