Емельянов С.В. Новые типы обратной связи
Подождите немного. Документ загружается.

(6.20)
6.3.
Статическая операторная обратная
связь 221
6.3.5. Инерционно-релейная
координатно-операторная обратная связь
при неизвестном параметре при упрхшлении
В этом пункте для стабилизации Ре-объекта (6.8)
^ = 2(d-g/i)^ + b/i-|-a-g/i, b =
b
+ 2qd
аеА,
be В,
применяется инерционно-релейная КО-связь вида
qfi
—
b~fi = ksgn^, к = const > О,
b- =b- + 2qd,
которая может быть использована и тогда, когда значение параме-
тра 6 неизвестно. Отметим, что допускаются изменения неизвестных
параметров а, 6 во времени произвольным образом. Структура ре-
гулятора (6.20) совпадает со структурой регулятора на рис.6.8 при
замене 6 на 6~.
Подстановка (6.20) в (6.8) дает уравнение замкнутой системы в
следующем виде:
i = 2{d- qn)i + (6 - b-)ii -ksgni + a. (6.21)
Поскольку и в этом случае переменная ц равномерно ограничена (при
g < 0), то, очевидно, существует такое число а", что при fc > а° в
точке ^ =
О
возникает скользящий режим.
В скользящем режиме можно считать выполненными равенства
^ = 0, ^ = 0,
тогда из уравнения (6.21) эквивалентное значение разрывного сигнала
определяется в виде
^sgneq^ = a-|-(6-6")/j.
После подстановки этого значения в уравнение регулятора (6.20)
находим уравнение движения операторной переменной /i в скользящем
режиме
g/i-6/i = a, (6.22)
которое в точности совпадает с уравнением скольжения для перемен-
ной /* из предыдущего пункта. Поэтому верны все сделанные ранее
выводы и, в частности, о том, что уравнение скольжения по основной
переменной после окончания переходного процесса уравнения (6.22)
дается выражением
XI = -{d + qa/b)xi.
Следовательно,
• ив этом случае имеет место неустранимый (хотя и сколь угодно
малый при q
—>
—0) динамический статизм.
222 Глава 6. Теория
операторной обратной
связи
Сохраняются также все замечания и о прочности системы управления,
и о физическом смысле эффекта компенсации возмущений а, Ь.
Ход проекций фазовых траекторий на множество Gt в плоскости
{xi,X2) показан на рис. 6.5, а для получения структуры системы до-
статочно в схеме на рис. 6.11 заменить параметр 6 на 6~ и добавить
двойную стрелку J^ 6 € В, действующую на объект Р и отражающую
влияние фактора неопределенности.
Достоинство регулятора (6.20) состоит в том, что он эффективно
действует при любых неизвестных параметрах а^ А,Ь ^ В.
6.3.6. Интегрально-релейная
координатно-операторная обратная связь
Максимально возможное упрощение системы управления достигается
при использовании интегрально-релейного закона
g/i = Jk8gn^. (6.23)
В этом случае замкнутая система управления описывается (6.23) и
уравнением
^ = 2((f-?/i)^-|-6/i-»-a-Jtsgn^, b =
h-{-2qd.
(6.24)
При возникновении скользящего режима можно считать выполнен-
ными в надлежащем смысле равенства
а поэтому эквивалентное значение разрывного сигнала имеет следую-
щее значение:
После его подстановки в уравнение регулятора (6.23) находим точные
и асимптотические уравнения скольжения для переменных /i и zi в
виде известных уже из предыдущего выражений
qii-bn = a, xi = -{d-qn)xi- (d + qa/b) xf,
tioo=-a/b, xi = -{d+qa/b)xi.
Поэтому справедливы все выводы, сделанные в пунктах 6.3.4 и 6.3.5.
Единственная трудность в проведенном рассуждении состоит в
том, что факт возникновения скользящего режима в точке ( = О не
просто усмотреть из уравнений замкнутой системы (6.23), (6.24). По-
скольку нас интересует анализ в малом, то этот вопрос^можно иссле-
довать с помощью функции Ляпунова вида
« = (1/2)^ (6.25)
6.3. Статическая операторная обратная связь
223
Действительно, полагая для простоты, что параметры а,Ь = const,
после дифференцирования функции (6.25) в силу уравнений движения
(6.23),
(6.24) находим
(6.26)
v = i = ^[2(d- qn)i +
bfi
+ a- asgn^] =
= 2{d-qfi)e-\^\[d-(b(i + ^)4t^a
Далее заметим, что в положении равновесия
^ =
О,
1/1
+ 0 = 0,
поэтому в его окрестности в (6.26) доминирует член —d|^|. Следова-
тельно, существует число 7 >
О
такое, что
11
< -7lf
I
= -7\/2и = -7*>А.
Решая последнее дифференциальное неравенство, находим оценку
из которой следует, что в некоторой окрестности положения равнове-
сия скользящий режим всегда возникает через конечное время, что и
требовалось доказать.
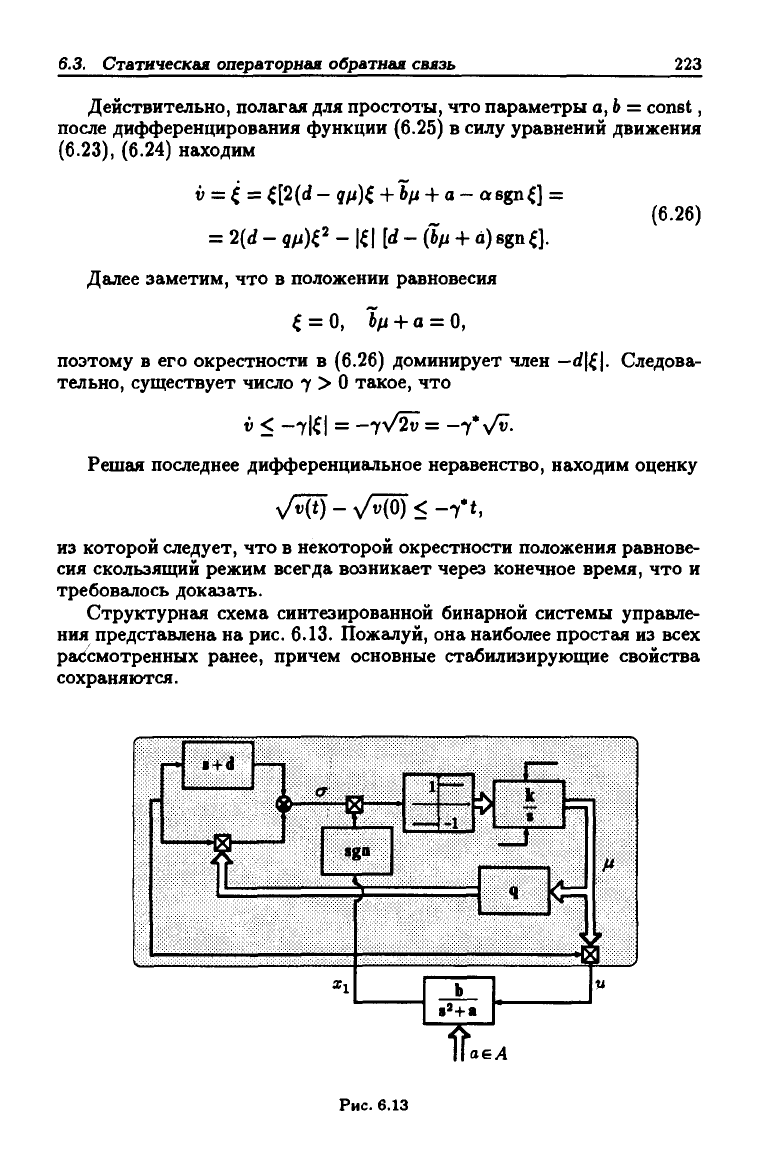
Структурная схема синтезированной бинарной системы управле-
ния представлена на рис. 6.13. Пожалуй, она наиболее простая из всех
рассмотренных ранее, причем основные стабилизирующие свойства
сохраняются.
¥
,
•+d
X. <r „
sgn
—i^—
Xi
P-,—, г-
J
'-J
' -i
• -1
>
1
_I
q (
Ч
,;
b
M
[
,
и
sA
Рис. 6.13
224 Глава 6. Теория
операторной обратной
связи
Проведенное исследование показало, что с помощью 0-связи можно
значительно повысить качество переходных процессов бинарной си-
стемы управления, в частности:
• устранить колебательность фазового вектора в множестве Gs;
• повысить прочность системы управления путем уменьшения ко-
эффициентов передачи в главном канале и, более того, вовсе отка-
заться от использования в КО-законах демпфирующей компоненты
м
= -Ы;
• понизить размерность замкнутой системы на 2 порядка, напри-
мер с 3-го до 1-го (при сочетании с динамической разрывной КО-
связью);
• сколь угодно точно достигнуть (правда, в ущерб прочности) тре-
буемого качества переходных процессов.
При этом статическую 0-связь неизбежно сопровождает статизм (ди-
намический статизм в основных переменных), что, впрочем, есте-
ственно для любой статической обратной связи. Вопрос об исполь-
зовании динамической 0-связи здесь не затрагивается. В следующей
главе используем ОК-связь для устранения указанного статизма.
Глава 7
Теория операторно-координатной
обратной связи
Данная глава посвящена качественному исследованию бинарных си-
стем автоматического управления с разными типами обратной связи.
Потенциально подобные нелинейные динамические системы стабили-
зации должны обладать самыми совершенными свойствами, близкими
к тем идеальным, которые можно наблюдать у систем управления с
глубокой обратной связью. Однако, в отличие от последних, бинарная
система стабилизации прочна в классе регулярных и сингулярных воз-
мущений. Пожалуй, эта глава в наиболее полной степени демонстри-
рует использование эффекта нелинейности в задачах стабилизации су-
щественно неопределенного объекта. Итоговые уравнения движения
системы стабилизации принципиально нелинейны, достаточно сложны
и обладают глобально устойчивыми решениями, которые мало зависят
(а в некоторых случаях не зависят) от факторов неопределенности и
могут быть описаны простейшими дифференциальными уравнениями.
Подобные нелинейные уравнения есть прямой результат применения
разработанной в монографии теории.-
О возможности получения подобных уравнений другими методами
сегодня ничего неизвестно.
7.1.
Динамический статизм
и операторно-координатная обратная связь
В предыдущих главах было установлено, что стабилизация в нуле не-
определенного объекта
XI = Х2,
Х2 = axi +bu, а
G
А, b Е В,
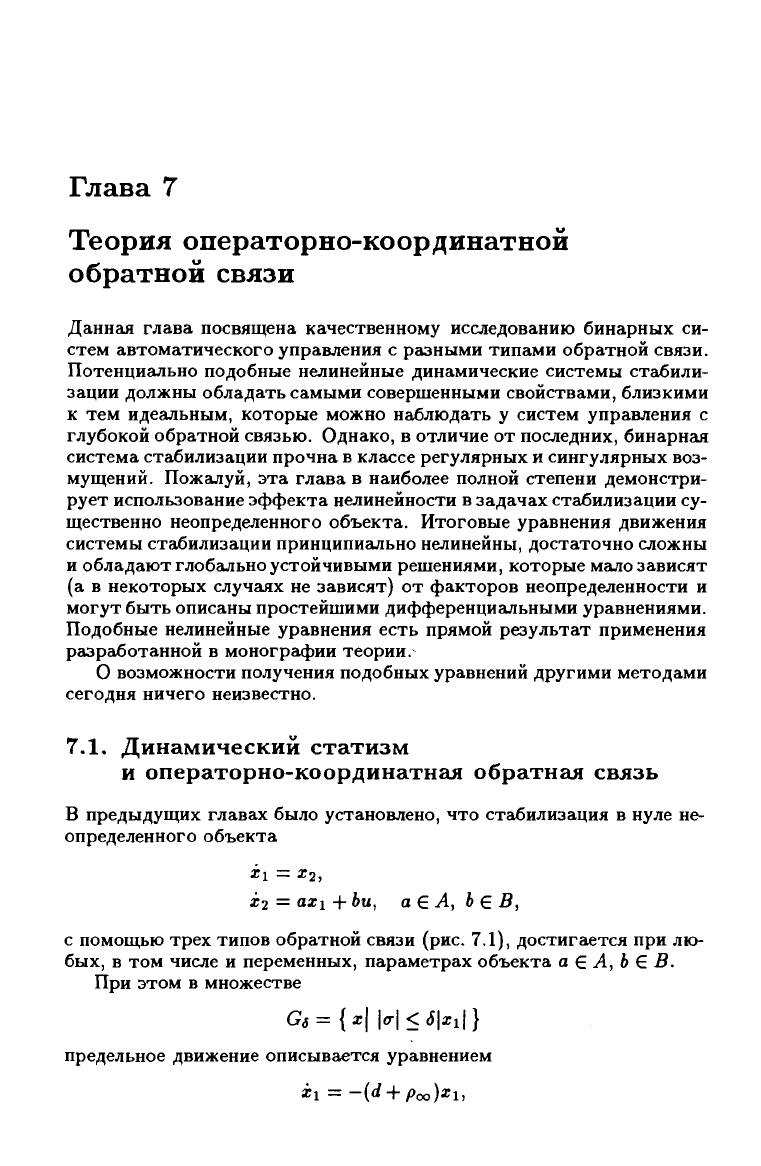
с помощью трех типов обратной связи (рис. 7.1), достигается при лю-
бых, в том числе и переменных, параметрах объекта а Е А, b € В.
При этом в множестве
Gs = {x\ \(T\<S\xi\}
предельное движение описывается уравнением
XI = -(d + poo)xi,
226
Глава 7. Теория операторно-координатной обратной связи
В
котором число
роо
определяет динамический статизм
Роо
= -qa/kb,
6
= 6- 2qd,
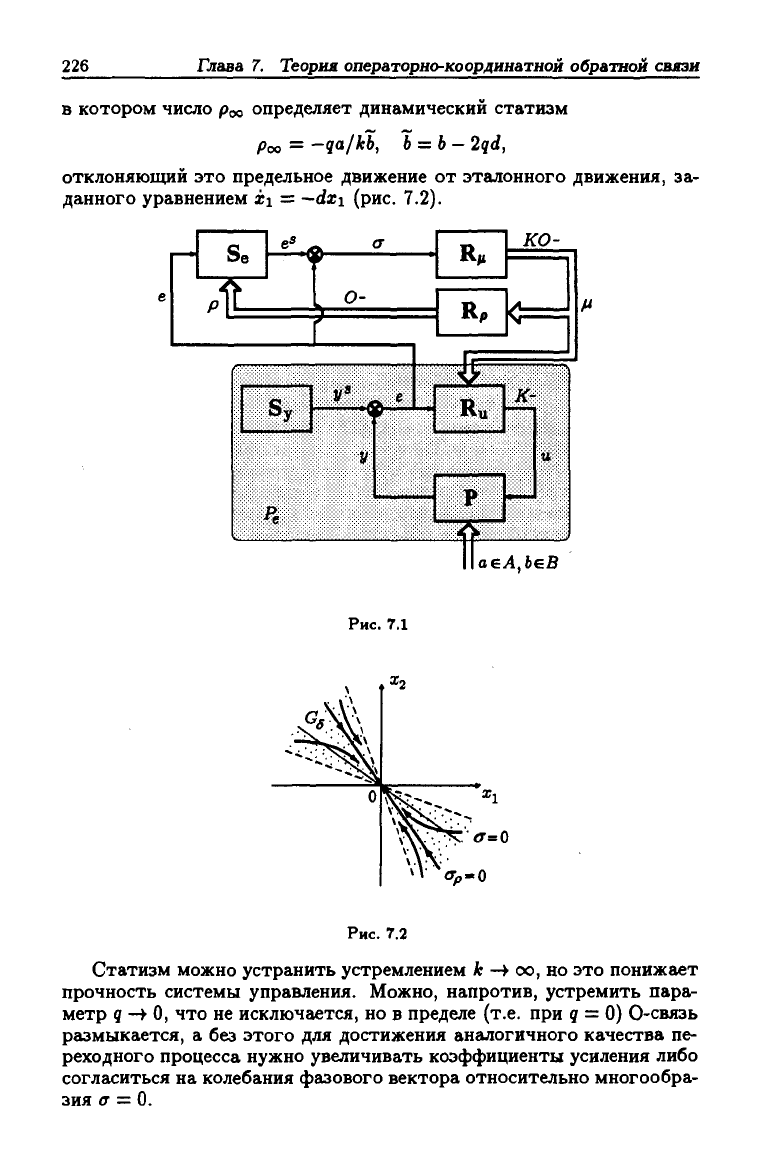
отклоняющий это предельное движение от эталонного движения, за-
данного уравнением xi = ~dxi (рис. 7.2).
аеА,ЬеВ
Рис. 7.1
Рис. 7.2
Статизм можно устранить устремлением
Аг
-> оо, но это понижает
прочность системы управления. Можно, напротив, устремить пара-
метр ? ->
О,
что не исключается, но в пределе (т.е. при g = 0) 0-связь
размыкается, а без этого для достижения аналогичного качества пе-
реходного процесса нужно увеличивать коэффициенты усиления либо
согласиться на колебания фазового вектора относительно многообра-
зия
<т
= 0.
7.1.
Динамический статиэм
227
Стоит отметить, что устремление параметра 5 -> О, как это сле-
дует, например, из уравнения интегрально-релейного КО-регулятора
fi=-8gn ^,
я
означает, по существу, введение глубокой обратной связи в КО-конту-
ре регулирования, так как при этом k/q -¥ оо. Это, как известно,
ведет к потере прочности и, хотя значения скрытых параметров в
регуляторе можно считать меньшими, нежели значения скрытых па-
раметров в объекте, и, следовательно, критическое значение коэффи-
циента усиления этого контура, при превышении которого требуется
устойчивость, выше, тем не менее в принципиальном плане следует
поискать новые средства для точного решения рассматривг^мой за-
дачи стабилизации.
Важно также отметить, что в системах со статической 0-связью и
разрывной КО-связью при возникновении скользящего режима упра-
вление в главном контуре описывается выражением и = (k/q)
(т,
и
хотя, быть может, k/q >
ксг,
неустойчивость не наступает. Обосно-
вание этого факта почти очевидно и здесь не приводится.
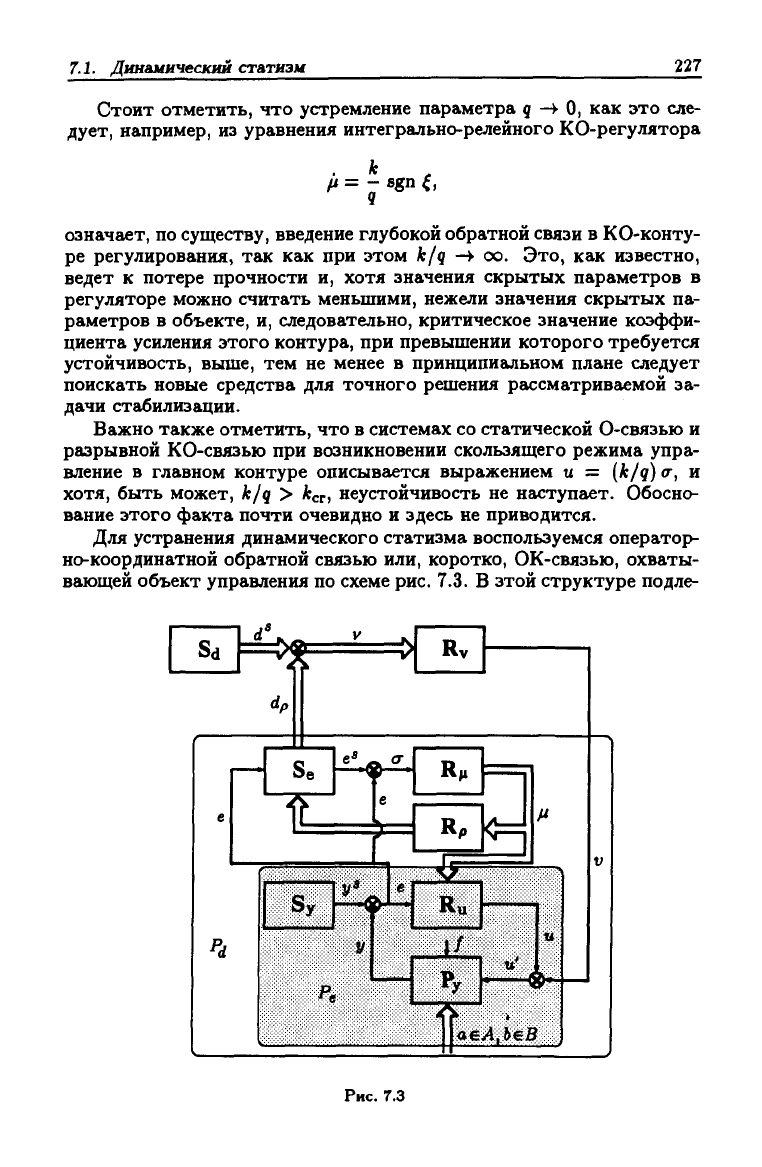
Для устранения динамического статизма воспользуемся оператор-
но-координатной обратной связью или, коротко, ОК-связью, охваты-
вающей объект управления по схеме рис. 7.3. В этой структуре подле-
Sd
е
dp
_ (
1
\ " > Rv
5е
И-^-Ч RM 1==Т1
jH "Р Ч|—
1 , |^= =Ц
У*
Sy '""V
У
Р^
и'
1 Pjr ——® 1
[аеЛ.беВ
Рис. 7.3
228
Глава 7. Теория операторно-координатной обратной связи
жат заданию или синтезу операторы 0-задатчика Sd и ОК-регулятора
Rf,. Напомним, что dp = d{p). Выделенная часть схемы на рис. 7.3
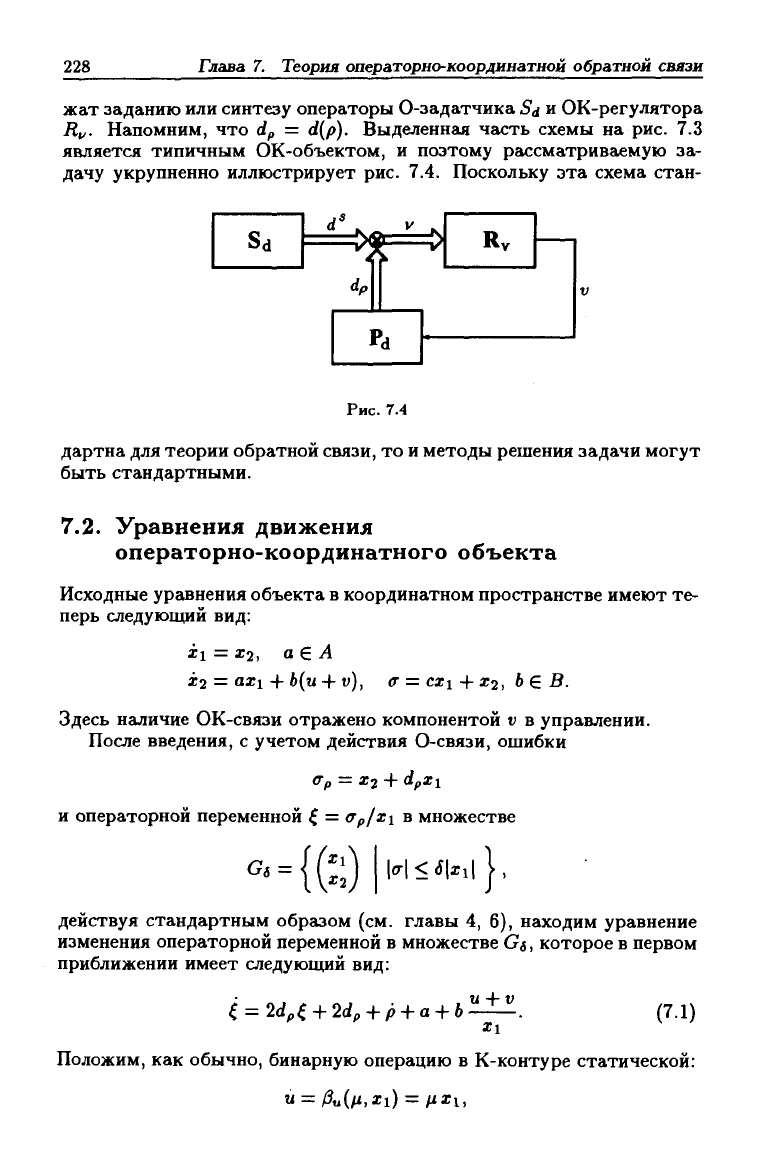
является типичным ОК-объектом, и поэтому рассматриваемую за-
дачу укрупненно иллюстрирует рис. 7.4. Поскольку эта схема стан-
Sd
с>5е=Ф
Rv
Рис.
7.4
дартна для теории обратной связи, то и методы решения задачи могут
быть стандартными.
7.2. Уравнения движения
операторно-координатного объекта
Исходные уравнения объекта в координатном пространстве имеют те-
перь следующий вид:
XI = Х2, ае А
Х2 = axi + b{u + v),
(т
= сх\ +
Х2,
b £ В.
Здесь наличие ОК-связи отражено компонентой v в управлении.
После введения, с учетом действия 0-связи, ошибки
(Гр
= Х2 + dpXi
и операторной переменной ^ =
<Тр1х\
в множестве
действуя стандартным образом (см. главы 4, 6), находим уравнение
изменения операторной переменной в множестве d, которое в первом
приближении имеет следующий вид:
^ = 2dp^ + 2dp + p + a + b
и +
V
Хх
(7.1)
Положим, как обычно, бинарную операцию в К-контуре статической:
и = P^{fx,xi) = fixi,
7.3.
Статический ОК-регулятор
229
аналогично распорядимся выбором бинарной операции в ОК-контуре:
где,
как принято выше, /х и
»/
— операторные переменные. При таком
выборе уравнение (7.1) принимг1ет следующий вид:
i = 2df^ + 2dp + p + a +
b(fi
+
r)),
(7.2)
где ц и
Г)
можно рг1ссматривать в качестве управлений.
Сохраняя преемственность, положим 0-связь статической:
р =
—qfi,
q = const,
а воздействие на параметр 5е-задатчика — адаптивным:
dp = d + р.
Тогда при интегрально-релейном КО-регуляторе
qfi = kisgn^, Ari = const,
уравнение изменения операторной ошибки ^ (7.2) примет вид
i = 2{d-q(i)^ + bii-kisgn^ + a +
bT},
b =
b-2qd.
(7.3)
Уравнение (7.3), дополненное уравнением изменения основной пе-
ременной
ii = -{d + p)xi+^xi, (7.4)
и уравнение ОК-регулятора
т]
= R^y, (7.5)
где ОК-ошибка регулирования
i/ = df,-d = p, (7.6)
я R,, — оператор ОК-регулятора, описывают в множестве Gg замкну-
тую систему регулирования с четырьмя типами обратной связи. По-
скольку
i>
= ^=-*isgn^, (7.7)
то нужно позаботиться о надлежащем выборе оператора Д,,, гаран-
тирующего стабилизацию ошибки i/ в нуле. Ргьссмотрим некоторые
варианты.
7.3.
Статический ОК-регулятор
Пусть оператор R,j в (7.5) является простейшим линейным операто-
ром, т.е.
т]
= k^v- Тогда надлежит исследовать на устойчивость следу-
ющую систему уравнений, для удобства обозначаемую символом Е*^:
i = 2(d- qn)i + bn-ki sgn^ -|- kibu + a, (7.8)
i> = -*isgn^. (7.9)
230 Глава 7. Теория
операторно-координатной обратной
связи
Поскольку и = р, р= —9А«, то после введения обозначения
6* = (1 - 9*2)6 - 2qd,
эту систему можно переписать в более удобном виде
^ = 2(d - qfi)^ + ЬУ - ki sgn^ + а,
i>= -kisgn^.
Уравнения, подобные уравнению (7.8) Е'-системы, подробно иссле-
довались в главах 4, б, поэтому можно утверждать, что при выполне-
нии неравенства fci > а° в точке ^ =
О
возникает скользящий режим.
Поскольку при этом, кроме того, в определенном смысле ^ = О, то
эквивалентное значение разрывного сигнала определяется следующим
выражением:
*isgneq^ = 6*/i + a.
После подстановки этого выражения в уравнение (7.9) Е'^-системы
находим уравнение изменения 0-ошибки i/ в виде
i>
=
—b*fi —
a. В силу
того,
что и = р=
—qf^,
окончательно имеем уравнение для ошибки i/:
й = —и-а. <7.10)
Я
Поскольку b*/q < О, то уравнение (7.10) асимптотически устойчиво и
имеет положение равновесия в точке
j/<«
= |^, b' = (l-qk2)b-2qd.
Следовательно,
• статическая ОК-связь не устраняет динамический статизм, а лишь
несколько уменьшает его величину по сравнению с рассмотрен-
ными выше системами управления.
Действительно, например, в системе со статической 0-связью вели-
чина статизма давалась выражением
Роо
= qa/b, 6 =
6 —
2qd,
но так как 6* > 6, то очевидно имеем требуемое
I/QO
<
Роо •
Увеличением ^2
—>
оо можно устранить статизм
I/QO,
НО
при этом
будет нанесен ущерб прочности системы. Действительно, в этом слу-
чае вторая компонента управления линейно связана с основным упра^
влением
V = r]Xi = k2i^xi = —qk-iliXi = —qki^
и полное управление и' = и
-\-
v также пропорционгшьно основному
управлению
u' = {\-qk2)u. (7.11)