Емельянов С.В. Новые типы обратной связи
Подождите немного. Документ загружается.

7.6. Разрывная ОК-связь 241
7.6.2. Скользящие рехсимы 2-го порядка в ОК-контуре
Рассмотрим здесь тот случай финитной стабилизации ошибки ОК-
контура и, который естественно возникает при использовании раз-
рывной ОК-связи следующего вида:
Г]
= -к2sgn iv+ х/[Нsgnf j •
(7.34)
Опуская, ввиду аналогичности, рассуждения, устанавливающие
финитность возникновения скользящего режима в точке ^ = О, перехо-
дим непосредственно к анализу уравнений скольжения в (/i,e)-npocT-
ранстве или, иначе, уравнений Е^рсистемы. При 6 = const имеем
уравнения
ди =
Ьи
+ е,
(7.35)
-k2bsgn ^/i-b v/Rsgn f^)
При получении этих уравнений учтено, что i/ = — g/i.
Уравнения, подобные уравнениям Е^рсистемы, подробно изуча-
лись в оптимально-релейных системах, сходные уравнения рассматри-
вались и в главе 5 при анализе скользящих режимов высших порядков.
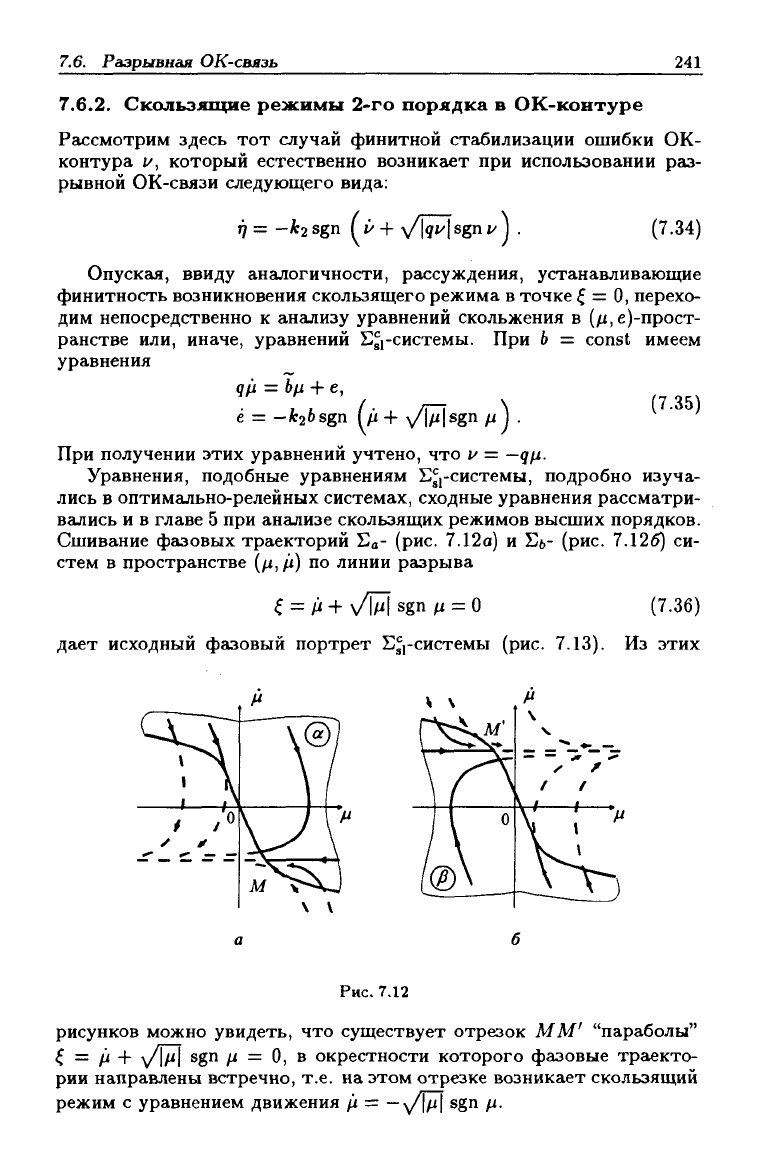
Сшивание фс1зовых траекторий Ед- (рис. 7.12а) и Еь- (рис. 7.126) си-
стем в пространстве
(/i,/i)
по линии ргизрыва
^ = /i +
VAH
sgn р =
О
(7.36)
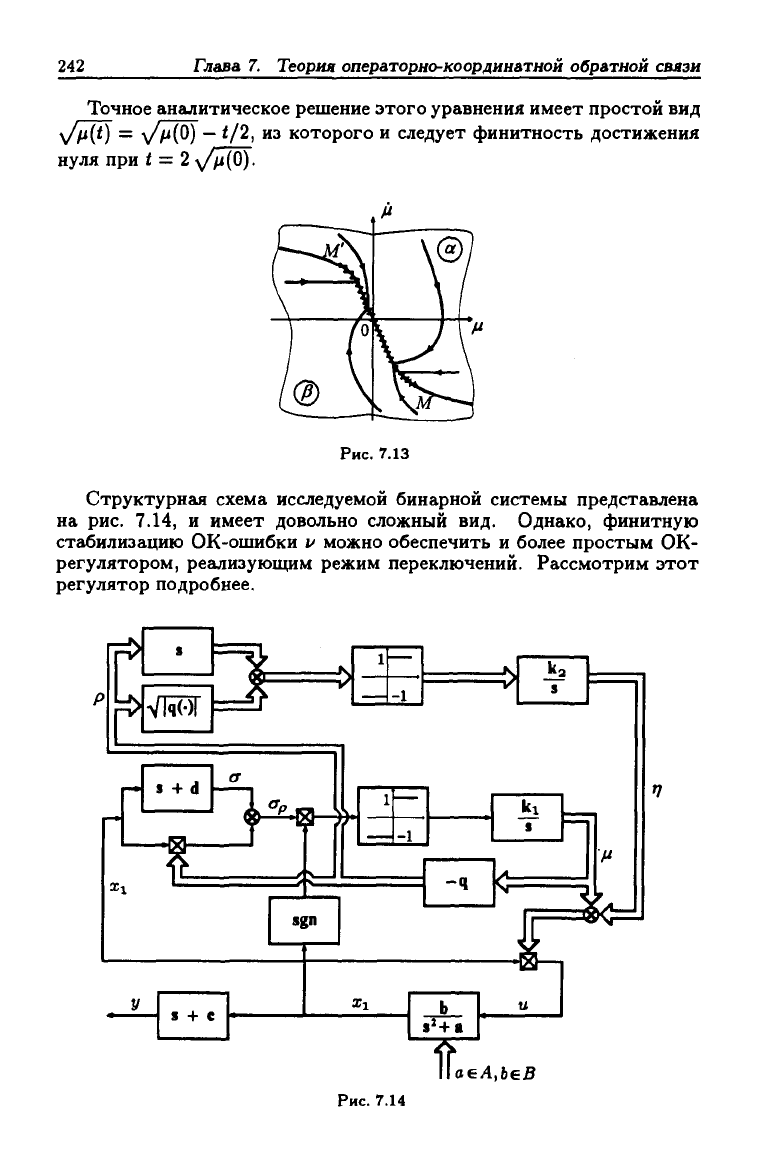
дает исходный фгйовый портрет Е^рсистемы (рис. 7.13). Из этих
\ V
Рис. 7.12
рисунков можно увидеть, что существует отрезок ММ' "параболы"
^ = /i + \/Ы sgn /i = О, в окрестности которого фазовые траекто-
рии направлены встречно, т.е. на этом отрезке возникает скользящий
режим с уравнением движения /i =
—
\/|Й ^g"
^^•
242
Глава 7. Теория
операторно-координатной обратной
связи
Точное аналитическое решение этого уравнения имеет простой вид
\/fi{i) =
y/i^iO)
—
t/2, из которого и следует финитность достижения
нуля при t = 2
^fi{0).
Рис. 7.13
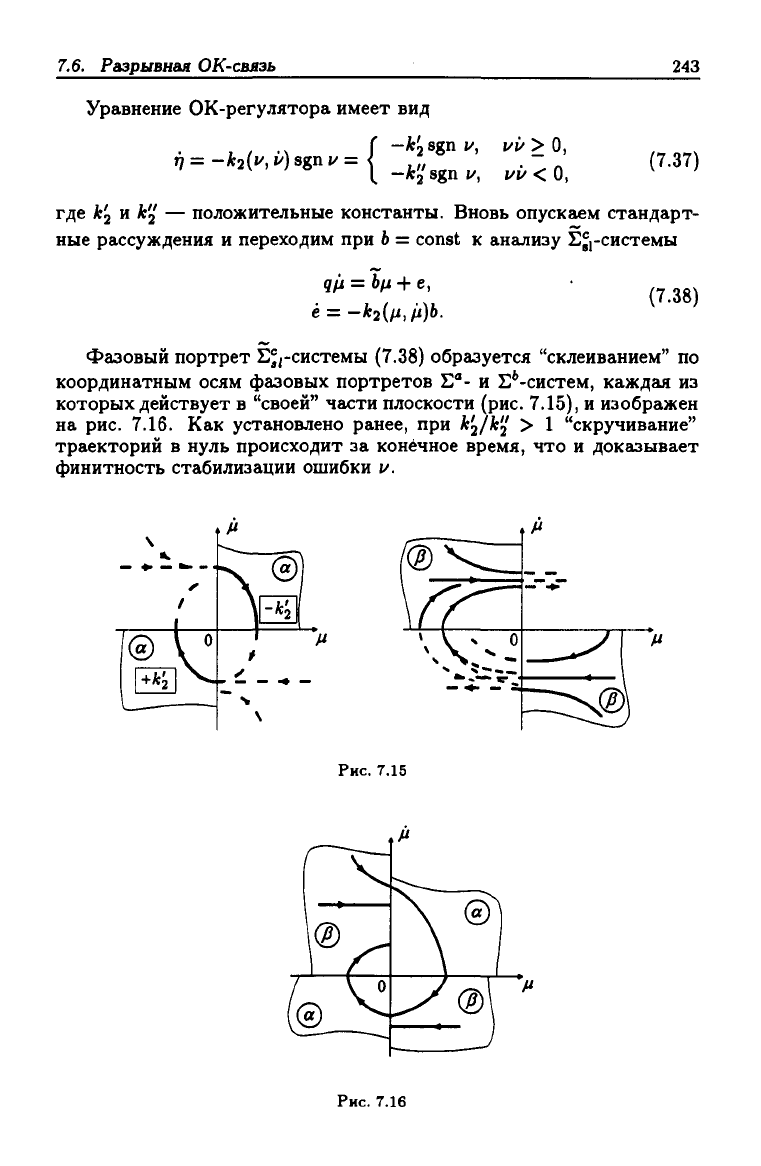
Структурная схема исследуемой бинарной системы представлена
на рис. 7.14, и имеет довольно сложный вид. Однако, финитную
стабилизацию ОК-ошибки и можно обеспечить и более простым ОК-
регулятором, реализующим режим переключений. Рассмотрим этот
регулятор подробнее.
Vlqor
I— S + d
^
Xl
>
sgn
М
-ч
Ф
С
зЫ
» + с
Xl
Рис. 7.14
s'+a
I
обЛ,Ье5
7.6. Разрывная ОК-свяэь
243
Уравнение ОК-регулятора имеет вид
I -*2 Sgn «^,
i/i'>0,
uu< 0,
(7.37)
где ^2 и *2 — положительные константы. Вновь опускаем стандарт-
ные рассуждения и переходим при
Ь
= const к анализу Е^рсистемы
ё = -k2{ti,ii)b.
(7.38)
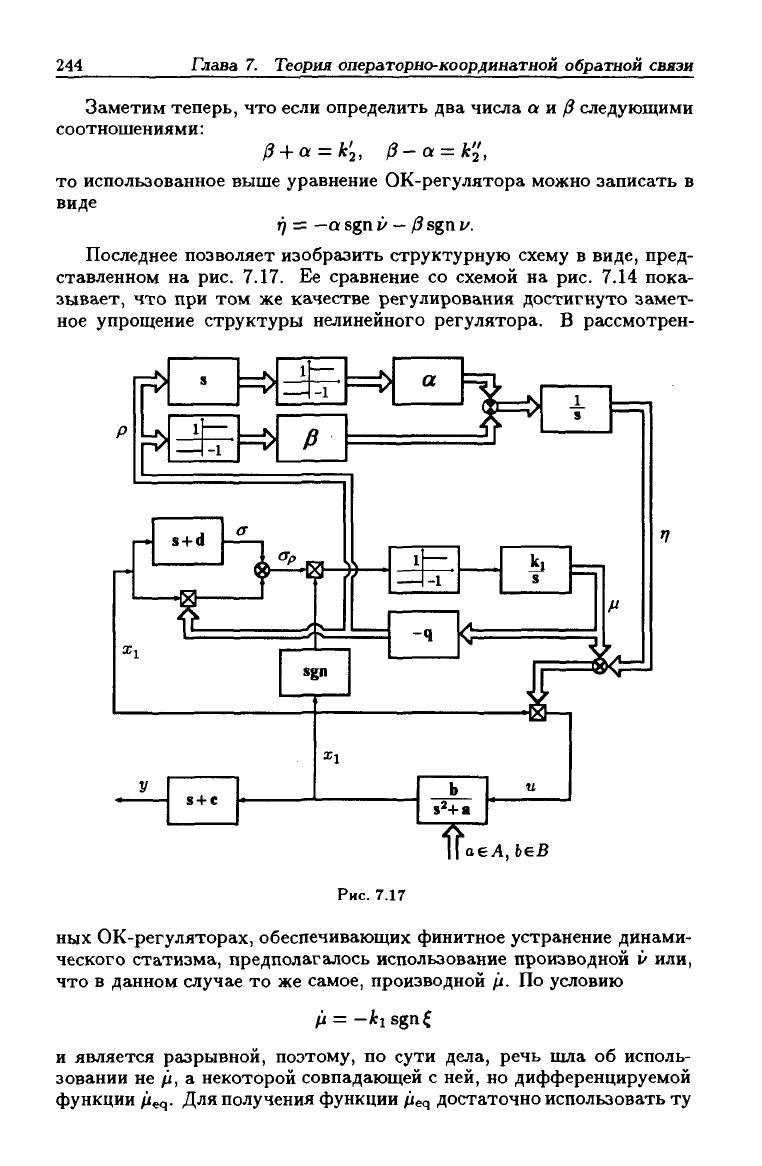
Фазовый портрет EJj-системы (7.38) образуется "склеиванием" по
координатным осям фазовых портретов Е"- и Е^-систем, каждая из
которых действует в "своей" части плоскости (рис. 7.15), и изображен
на рис. 7.16. Как установлено ранее, при кук!^ > 1 "скручивание"
траекторий в нуль происходит за конечное время, что и доказывает
финитность стабилизации ошибки i/.
—
*-
—
г
:=:::N^
Рис. 7.15
Рис. 7.16
244
Глава 7. Теория операторно-координатной обратной связи
Заметим теперь, что если определить два числа а и /? следующими
соотношениями:
р + а =
к!2,
р-а = Щ,
то использованное выше уравнение ОК-регулятора можно записать в
виде
^ =
—а
sgn
I/
—
/? sgn и.
Последнее позволяет изобразить структурную схему в виде, пред-
ставленном на рис. 7.17. Ее сравнение со схемой на рис. 7.14 пока-
зывает, что при том же качестве регулирования достигнуто замет-
ное упрощение структуры нелинейного регулятора. В рассмотрен-
-1
1
-1
р
•-• s + d
"i^
sgn
s + c
3>
^1
" "^ I 1
-Ч
>
1
Г
^C=-
aeA. ЬбВ
Рис.
7.17
ных ОК-регуляторах, обеспечивающих финитное устранение динами-
ческого статизма, предполагалось использование производной v или,
что в данном случае то же самое, производной /i. По условию
/i= -ki sgni
и является разрывной, поэтому, по сути дела, речь шла об исполь-
зовании не /i, а некоторой совпадающей с ней, но дифференцируемой
функции /ieq. Для получения функции /ieq достаточно использовать ту
7.6. Разрывная ОК-связь
245
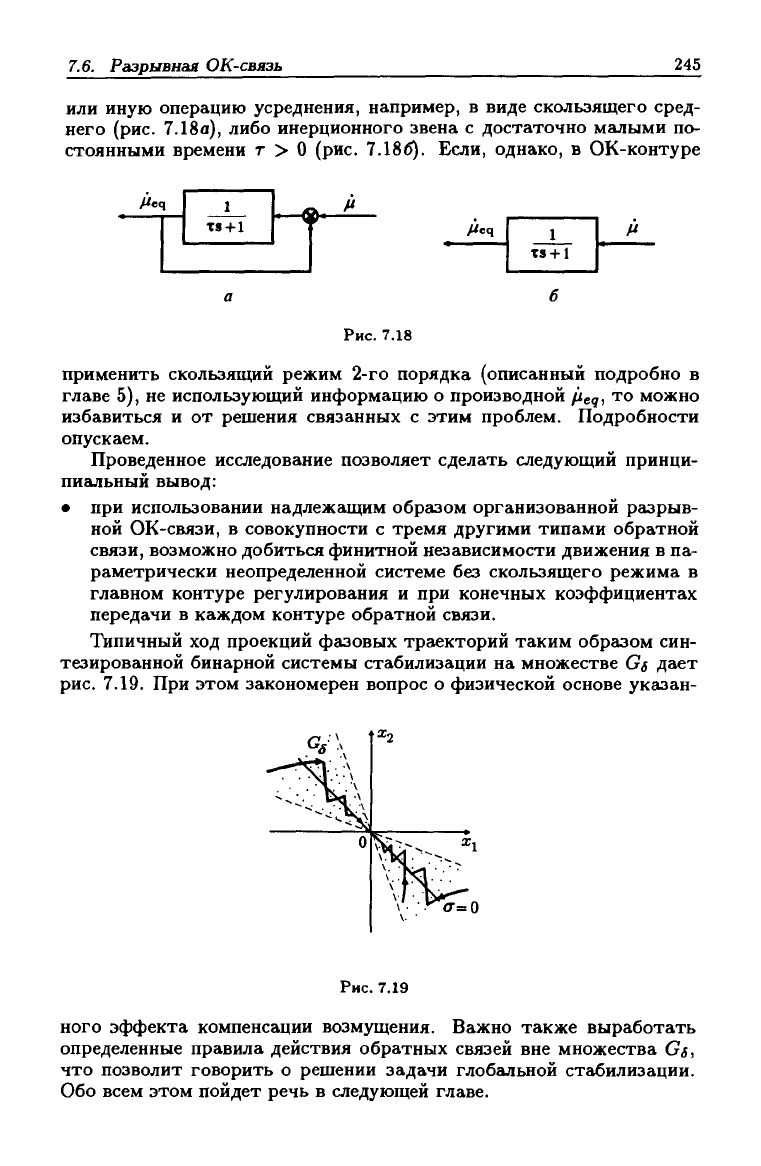
или иную операцию усреднения, например, в виде скользящего сред-
него (рис. 7.18а), либо инерционного звена с достаточно малыми по-
стоянными времени г > О (рис. 7.186). Если, однако, в ОК-контуре
М'ч
1
TS+1
•^
Aeq
1
TS +
1
Рис. 7.18
применить скользящий режим 2-го порядка (описанный подробно в
главе 5), не использующий информацию о производной /ieg, то можно
избавиться и от решения связанных с этим проблем. Подробности
опускаем.
Проведенное исследование позволяет сделать следующий принци-
пиальный вывод:
• при использовании надлежащим образом организованной разрыв-
ной ОК-связи, в совокупности с тремя другими типами обратной
связи, возможно добиться финитной независимости движения в па-
раметрически неопределенной системе без скользящего режима в
главном контуре регулирования и при конечных коэффициентах
передачи в каждом контуре обратной связи.
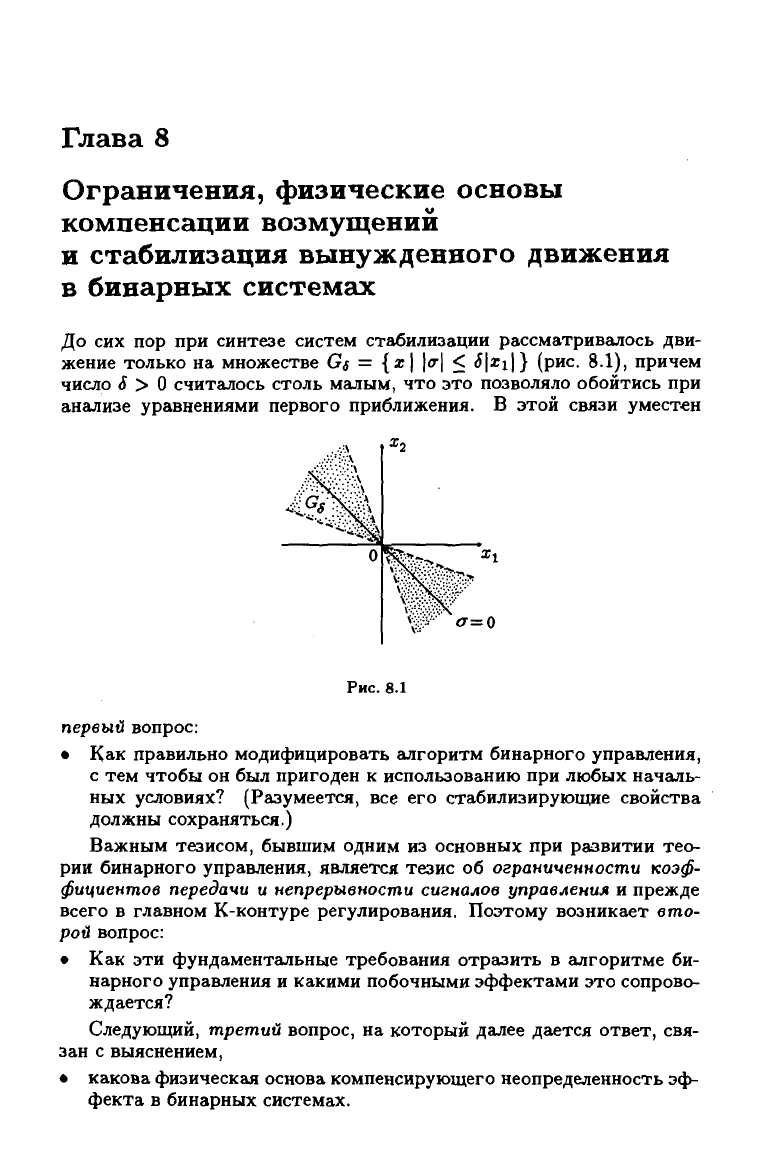
Типичный ход проекций фазовых траекторий таким образом син-
тезированной бинарной системы стабилизации на множестве Gg дает
рис.
7.19. При этом закономерен вопрос о физической основе указан-
Рис. 7.19
ного эффекта компенсации возмущения. Важно также выработать
определенные правила действия обратных связей вне множества Gs,
что позволит говорить о решении задачи глобальной стабилизации.
Обо всем этом пойдет речь в следующей главе.
Глава 8
Ограничения, физические основы
компенсации возмущений
и стабилизация вынужденного движения
в бинарных системах
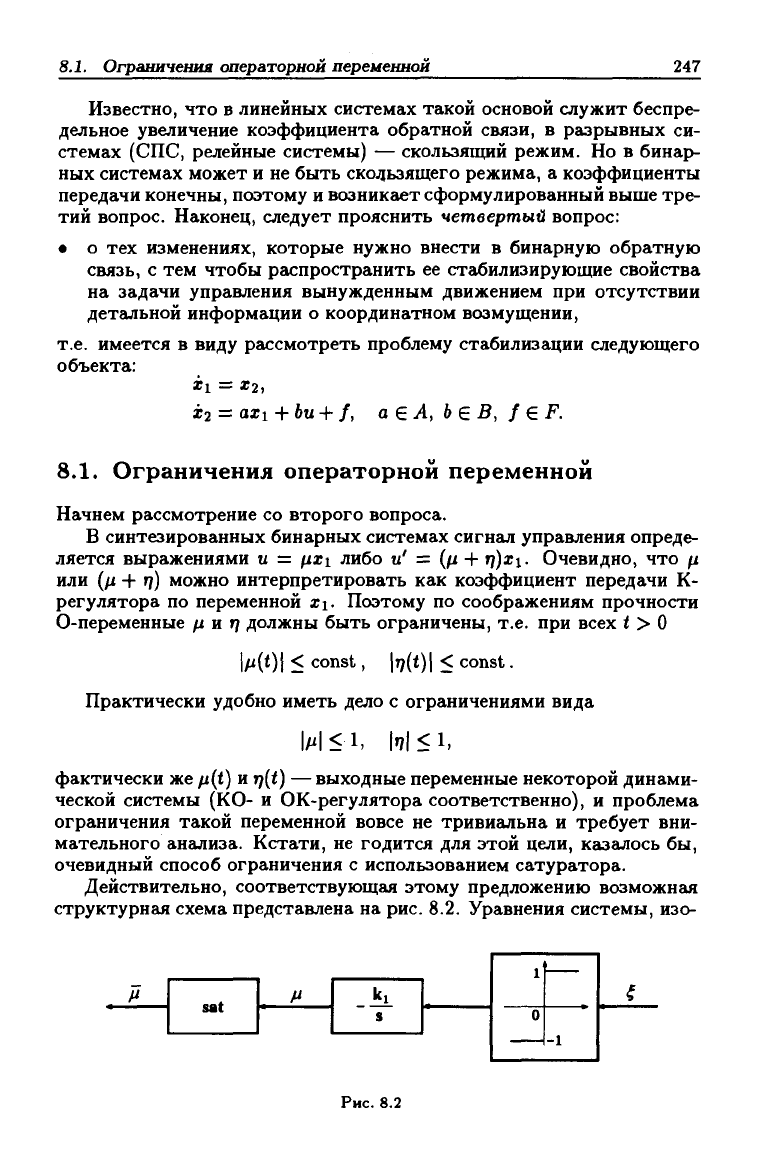
До сих пор при синтезе систем стабилизации рассматривалось дви-
жение только на множестве G* =
{
а;
| |<т| < Ji^i)} (рис. 8.1), причем
число S >
О
считалось столь малым, что это позволяло обойтись при
анализе уравнениями первого приближения. В этой связи уместен
а=0
Рис. 8.1
первый вопрос:
• Как правильно модифицировать алгоритм бинарного управления,
с тем чтобы он был пригоден к использованию при любых началь-
ных условиях? (Разумеется, все его стабилизирующие свойства
должны сохраняться.)
Важным тезисом, бывшим одним из основных при развитии тео-
рии бинарного управления, является тезис об ограниченности коэф-
фициентов передачи и непрерывности сигналов управления и прежде
всего в главном К-контуре регулирования. Поэтому возникает вто-
рой вопрос:
• Как эти фундаментальные требования отразить в гигоритме би-
нарного управления и какими побочными эффектами это сопрово-
ждается?
Следующий, третий вопрос, на который далее дается ответ, свя-
зан с выяснением,
• какова физическая основа компенсирующего неопределенность эф-
фекта в бинарных системах.
8.1.
Ограничения
операторной
перемениой
247
Известно, что в линейных системах такой основой служит беспре-
дельное увеличение коэффициента обратной связи, в разрывных си-
стемах (СПС, релейные системы) — скользящий режим. Но в бинар-
ных системах может и не быть скодьзящего режима, а коэффициенты
передачи конечны, поэтому и возникает сформулированный выше тре-
тий вопрос. Наконец, следует прояснить четвертый вопрос:
• о тех изменениях, которые нужно внести в бинарную обратную
связь, с тем чтобы распространить ее стабилизирующие свойства
на задачи управления вынужденным движением при отсутствии
детальной информации о координатном возмущении,
т.е.
имеется в виду рассмотреть проблему стабилизации следующего
объекта:
X2 = axi + bu + f, аеА, ЬеВ, feF.
8.1.
Ограничения операторной переменной
Начнем рассмотрение со второго вопроса.
В синтезированных бинарных системах сигнал управления опреде-
ляется выражениями и = цхх либо и' = {fi + Tf)xi. Очевидно, что fi
или (/i -I-
Г])
можно интерпретировать как коэффициент передачи К-
регулятора по переменной xi. Поэтому по соображениям прочности
0-переменные /лиг) должны быть ограничены, т.е. при всех t >
О
\n(t)\
< const, |r;(t)| < const.
Практически удобно иметь дело с ограничениями вида
И<1,
Ы<1,
фактически же fi{t) и
T){t)
— выходные переменные некоторой динами-
ческой системы (КО- и ОК-регулятора соответственно), и проблема
ограничения такой переменной вовсе не тривиальна и требует вни-
мательного анализа. Кстати, не годится для этой цели, казалось бы,
очевидный способ ограничения с использованием сатуратора.
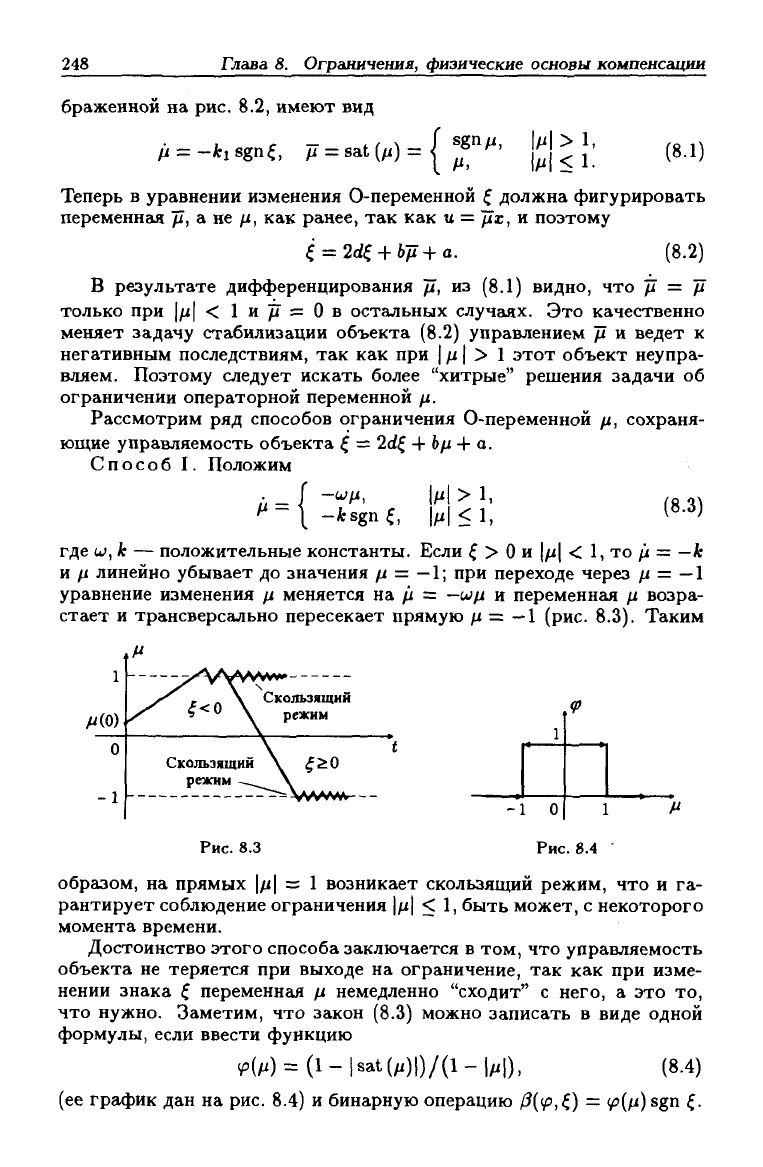
Действительно, соответствующая этому предложению возможная
структурная схема представлена на рис. 8.2. Уравнения системы, изо-
м
sat
М
S
1
0
—
-1
4
Рис. 8.2
248
Глава 8. Ограничения, физические основы компенсации
браженной на рис. 8.2, имеют вид
/i = -fcisgn^, /I = sat(/i)
~W. М<1.
(8.1)
Теперь в уравнении изменения 0-переменной ^ должна фигурировать
переменная /I, а не /х, как ранее, так как и = JTx, и поэтому
^ = 2rf^ +
6/H-a.
(8.2)
В результате дифференцирования ц, из (8.1) видно, что fi = fi
только при \ц\ < 1и/1=0в остальных случаях. Это качественно
меняет задачу стабилизации объекта (8.2) управлением /I и ведет к
негативным последствиям, так как при |
/х
| > 1 этот объект неупра-
вляем. Поэтому следует искать более "хитрые" решения задачи об
ограничении операторной переменной fi.
Рассмотрим ряд способов ограничения 0-переменной //, сохраня-
ющие управляемость объекта ^
—
2d^ + bfi + а.
Способ I. Положим
-ШЦ,
|/j|
> 1,
-fcsgn^, |я| < 1,
-{
(8.3)
где ш,к — положительные константы. Если ^>0и|//|<1,то/< = —к
и fi линейно убывает до значения /х =
—
1;
при переходе через ц = —\
уравнение изменения /i меняется на /J = —шц и переменнгш fi возра-
стает и трансверсально пересекает прямую /i = —1 (рис. 8.3). Таким
-
1
1 0
<р
] fi
Рис.
8.3
Рис.
8.4
образом, на прямых \fi\ ~ 1 возникает скользящий режим, что и га-
рантирует соблюдение ограничения \fi\< 1, быть может, с некоторого
момента времени.
Достоинство этого способа заключается в том, что управляемость
объекта не теряется при выходе на ограничение, так как при изме-
нении знака ^ переменная fi немедленно "сходит" с него, а это то,
что нужно. Заметим, что закон (8.3) можно записать в виде одной
формулы, если ввести функцию
^(p) = (l-|sat(M)|)/(l-H), (8.4)
(ее график дан на рис. 8.4) и бинарную операцию /?(у, О — v(/^)sgn ^.

8.1.
Ограничения
операторной
переменной
249
В новых обозначениях закон (8.3) эквивгигентен следующему, более
простому,закону:
ii = -k0{<p,i)-
(8.5)
Способ II. Заметим, что функцию
(р
из (8.4) можно представить
разностью
ip{^i)
=
sg{\-\-fi)-sg{^i-l), (8.6)
где sg(^) — функция знака (ее график приведен на рис. 8.5а). Тогда
sg(#)
sg
(\+ц)
1
0
sg(i -И)
1
А
-1
о
а
б в
Рис.
8.5
в результате вычитания графиков на рис.
8.55и
8.5в получаем требу-
емый график рис. 8.4. После подстановки (8.6)
в
(8.5) получаем
/i =-A;sg (l4-/i)sgn^ +Asg (//-l)sgn^,
fc =
const
>
0.
(8.7)
Учитывг1Я особенность знакового умножения, формулу (8.7) можно
регшизовать без бинарной операции путем использования двух кана-
лов распространения сигнала (рис. 8.6). Эта схема работает следу-
ющим образом. Если
^ >
О,
то
—sgn
^ =
—1
и из
двух диодов
Di,
Рис. 8.6
250
Глава 8. Ограничения, физические основы компенсации
Di пропускает сигнал только D^- Если при этом /i + 1 > О, то ключ
sw2 замкнут и /i = —к, что и требуется. Это происходит, пока ц не
достигнет значения /i =
—
1,
когда sw2 размыкг^ется, и тогда /i =
—
1,
пока ^ > О, либо пока ^ не сменит знак. В этом случае проводящим
становится D\, а не Dj. работает верхняя цепь, и если 1
—
/i > О, то
ключ swl замкнут и fi = к, как и должно быть. Как только станет
/i = 1, если только ^ не сменит знак, swl разомкнётся, фиксируя fi = 1.
Достоинство этой схемы в том, что в ней не возникает скользящего
режима на
|/j|
= 1.
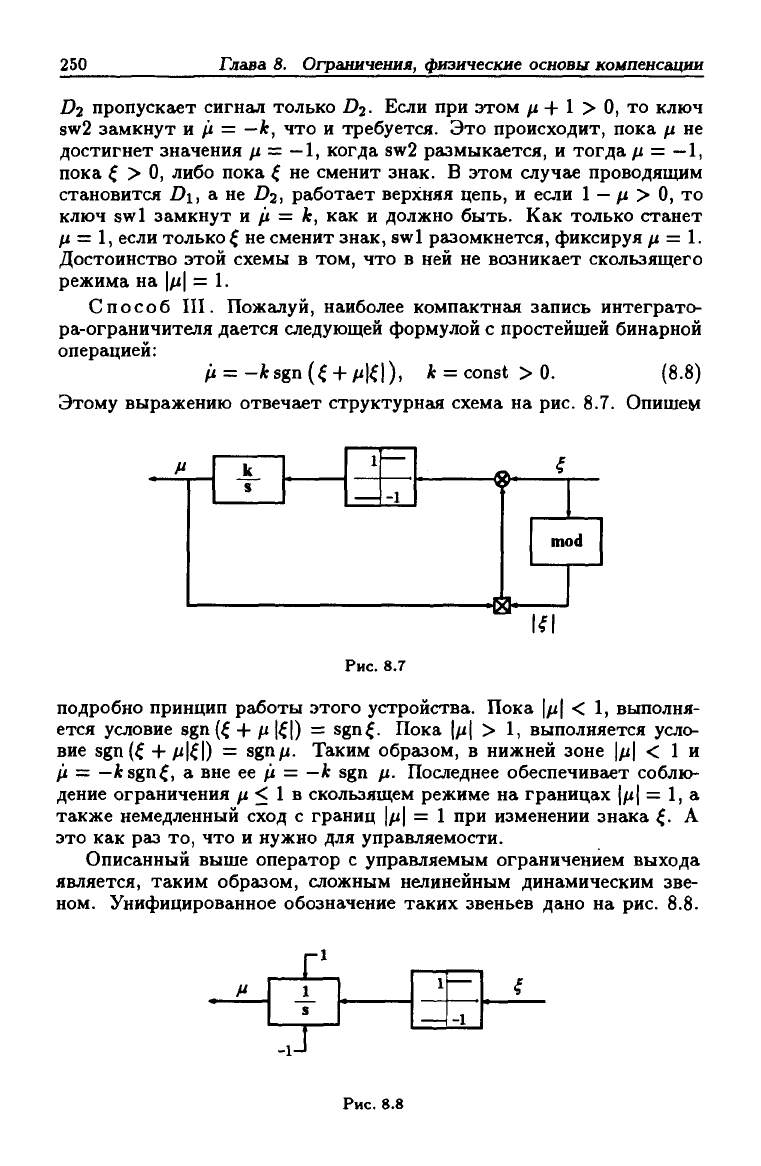
Способ III. Пожалуй, наиболее компактная запись интеграто-
ра-ограничителя дается следующей формулой с простейшей бинарной
операцией:
/i =-fcsgn(^-|-/i|^|),
Jk
= const>0. (8.8)
Этому выражению отвечает структурная схема на рис. 8.7. Опишем
м
к
S
1
-1
Рис.
8.7
ff. ^
9
'В
Г
а.
я*
mod
1^1
подробно принцип работы этого устройства. Пока \/л\ < 1, выполня-
ется условие sgn
(^-I-/i
1^1) = sgn^. Пока |/i| > 1, выполняется усло-
вие sgn(^ -f fi\^\) = sgn/i. Таким образом, в нижней зоне |^i| < 1 и
fi = —ksgn^, а вне ее /i = —к sgn fi. Последнее обеспечивает соблю-
дение ограничения /i < 1 в скользящем режиме на границах |/х| = 1, а
также немедленный сход с границ \fi\ = 1 при изменении знака ^. А
это как раз то, что и нужно для управляемости.
Описанный выше оператор с управляемым ограничением выхода
является, таким образом, сложным нелинейным динамическим зве-
ном. Унифицированное обозначение таких звеньев дано на рис. 8.8.
И
7^
-1
Рис. 8.8