Емельянов С.В. Новые типы обратной связи
Подождите немного. Документ загружается.

9.2.
Следящие
дифференцирующие
системы
271
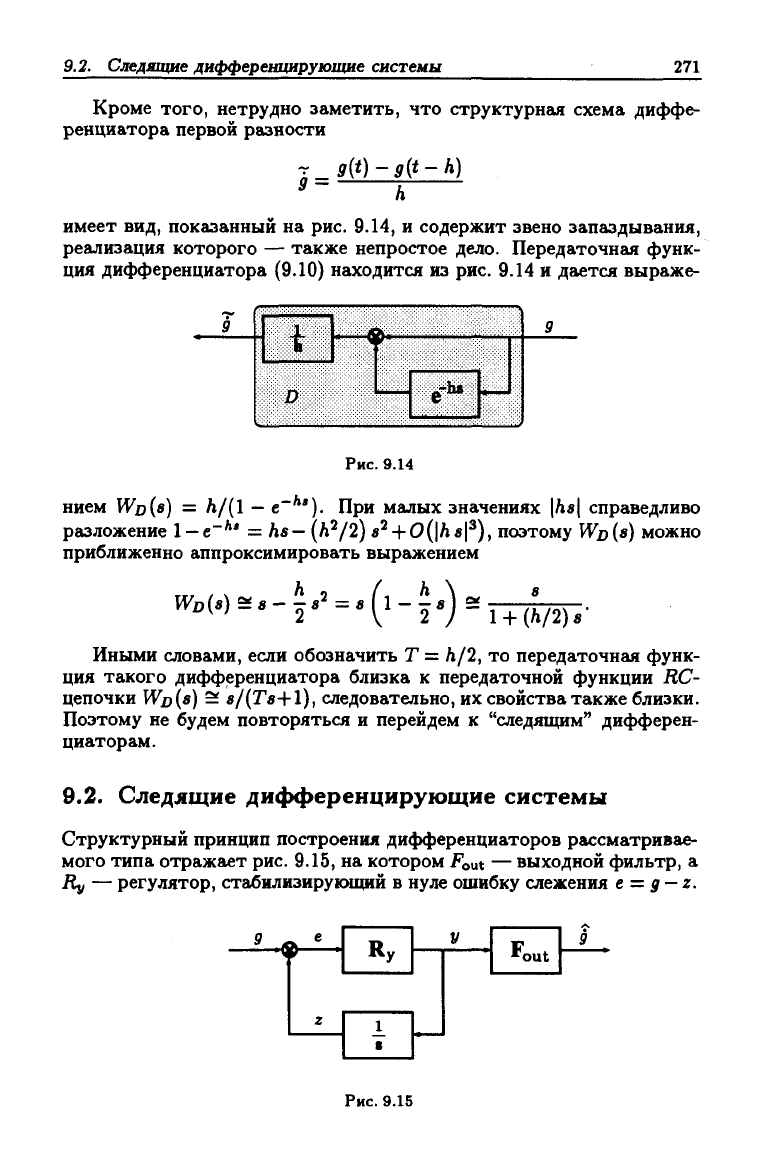
Кроме того, нетрудно заметить, что структурная схема диффе-
ренциатора первой разности
~^_9it)-9(t-h)
^~ h
имеет вид, показанный на рис. 9.14, и содержит звено запаздывания,
реализация которого — также непростое дело. Передаточная функ-
ция дифференциатора (9.10) находится из рис. 9.14 и дается выраже-
-»•
D
-гЬ»
Рис. 9.14
нием Wois) = Л/(1
—
е~ ). При малых значениях |Лв| справедливо
разложение l-e"*' = As— (Л'/2) в^-|-0(|Лв|^), поэтому WD(S) можно
приближенно аппроксимировать выражением
WD{S)
Л 2 Л Л \ 8
(h/2)8-
Иными словами, если обозначить Т = Л/2, то передаточная функ-
ция такого дифференциатора близка к передаточной функции RC-
цепочки Wj){s) ^ s/{Ts+l), следовательно, их свойства также близки.
Поэтому не будем повторяться и перейдем к "следящим" дифферен-
циаторам.
9.2.
Следящие дифференцирующие системы
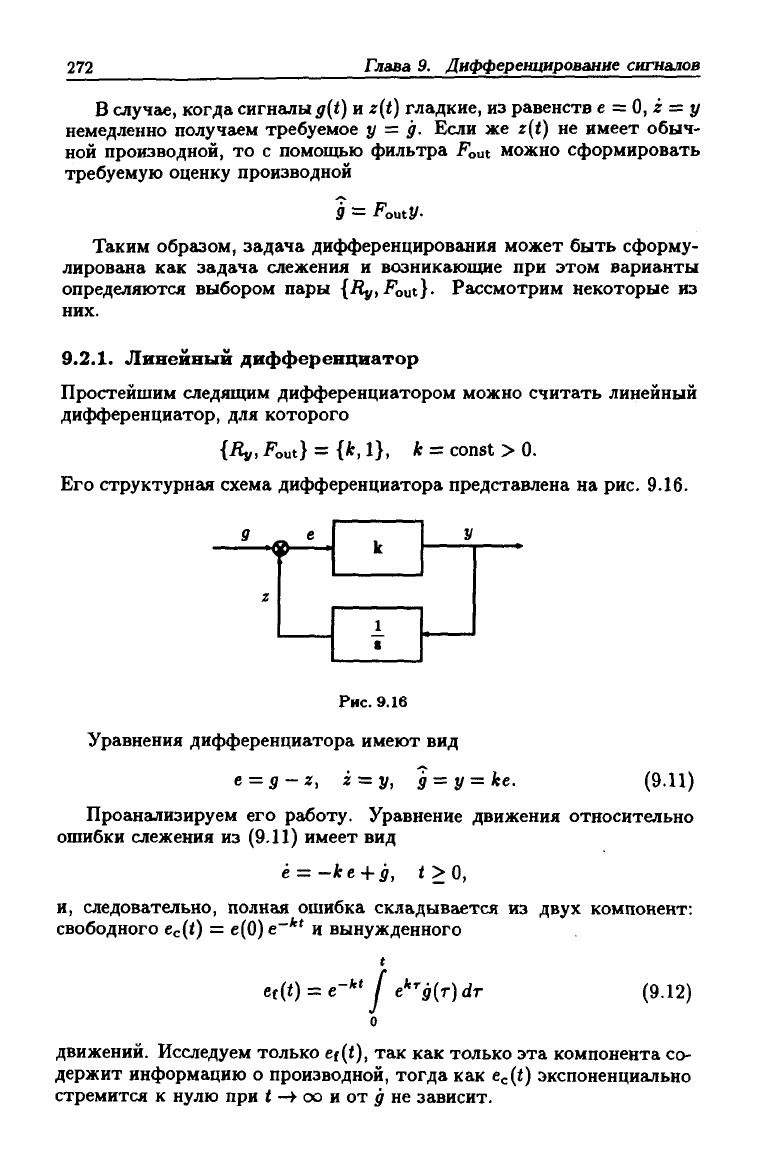
Структурный принцип построения дифференциаторов рассматривае-
мого типа отражает рис. 9.15, на котором Fout — выходной фильтр, а
Ry — регулятор, стабилизирукшщй в нуле ошибку слежения е = g
—
z.
^ е
Z
Ry
1
у
I'out
Рис. 9.15
272
Глава 9. Диффереицирование сигналов
В случае, когда сигналы g{t) и z{t) гладкие, из равенств е = О, i = у
немедленно получаем требуемое у = д. Если же z(t) не имеет обыч-
ной производной, то с помощью фильтра Fout можно сформировать
требуемую оценку производной
9 = Fouty-
Таким образом, задача дифференцирования может быть сформу-
лирована как задача слежения и возникающие при этом варианты
определяются выбором пары {Ry,Foxit}- Рак:смотрим некоторые из
них.
9.2.1.
Линейный дифференциатор
Простейшим следящим дифференциатором можно считать линейный
дифференциатор, для которого
{Ry, Fout} = {к, 1}, к = const > 0.
Его структурнг1Я схема дифференциатора представлена на рис. 9.16.
^
Рис. 9.16
Уравнения дифференциатора имеют вид
e = g-z, z = y, д = у = ке.
(9.11)
Проанализируем его работу. Уравнение движения относительно
ошибки слежения из (9.11) имеет вид
ё = -ке
+
д,
t>0,
и, следовательно, полная ошибка складывается из двух компонент:
свободного ес(<) = е(0) е~** и вынужденного
с
et{t)
=.€-"'
I
e>'-g{T)dT
(9.12)
движений. Исследуем только
et{t),
так как только эта компонента со-
держит информацию о производной, тогда как edt) экспоненциально
стремится к нулю при
< —>
оо и от ^ не зависит.
9.2.
Следящие
дифференцирующие
системы
273
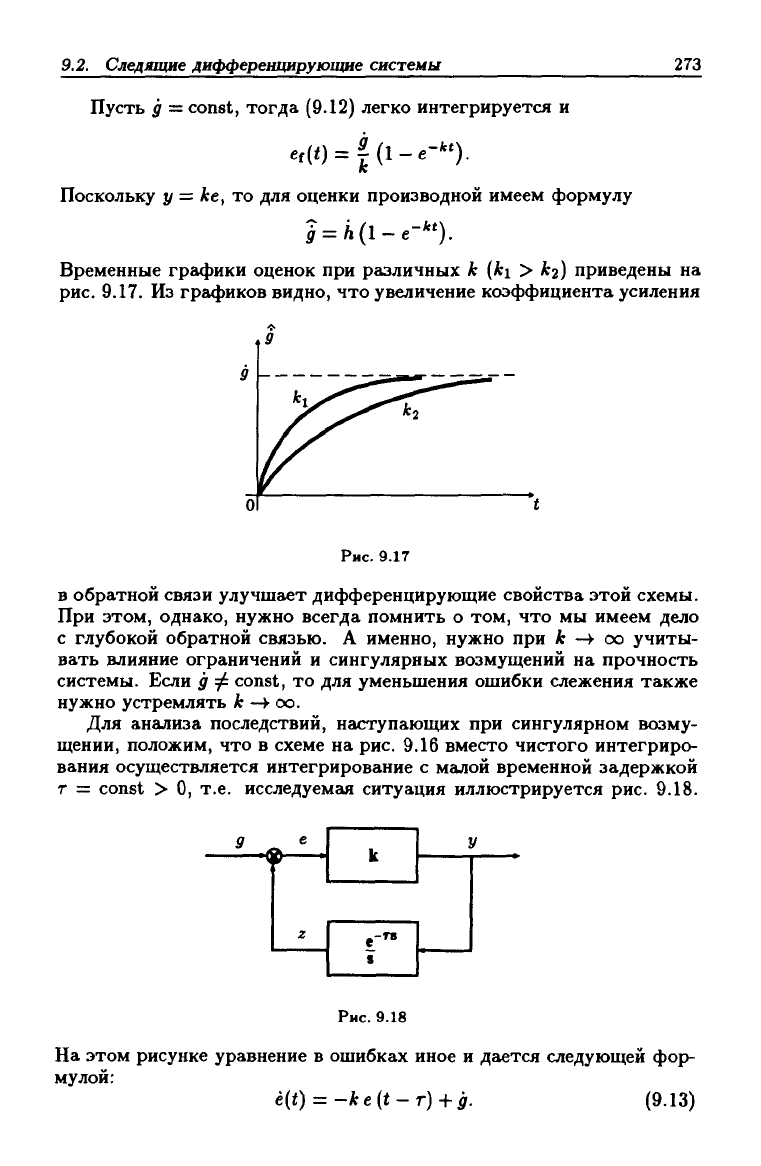
Пусть д
—
const, тогда (9.12) легко интегрируется и
e,(0 = f(l-e-*').
Поскольку у = ке, то для оценки производной имеем формулу
Ьл(1-е-*0.
Временные графики оценок при различных к {ki > /fj) приведены на
рис.
9.17. Из графиков видно, что увеличение коэффициента усиления
Рис. 9.17
в обратной связи улучшает дифференцирующие свойства этой схемы.
При этом, однако, нужно всегда помнить о том, что мы имеем дело
с глубокой обратной связью. А именно, нужно при к
—¥
оо учиты-
вать влияние ограничений и сингулярных возмущений на прочность
системы. Если д ф const, то для уменьшения ошибки слежения также
нужно устремлять fe -> оо.
Для анализа последствий, наступающих при сингулярном возму-
щении, положим, что в схеме на рис. 9.16 вместо чистого интегриро-
вания осуществляется интегрирование с малой временной задержкой
г = const > О, т.е. исследуемая ситуация иллюстрируется рис. 9.18.
9 ,
'\
е
Z
к
S
Рис. 9.18
' !/
На этом рисунке уравнение в ошибках иное и дается следующей фор-
мулой:
'e{t) = -kt{t-T)^g. (9.13)
274
Глава
9.
Диффереицирование сигналов
Теперь вопрос о том, принимать или не принимать во внимание
свободную компоненту решения уравнения (9.13), зависит от устой-
чивости квазиполинома
<р(8)
=
8
+ ке^^'.
Но при
ik
->•
оо его нули стремятся к нулям уравнения е"'"' =
О,
кото-
рое имеет нули в бесконечности правой комплексной полуплоскости
переменной s (Res > 0). Таким образом, исследуемый полином не-
устойчив, а поэтому неустойчива рассматриваемая дифференцирую-
щая система. Следовательно, устойчивость системы при сингулярном
возмущении ограничивает коэффициент обратной связи критическим
значением к <
ксг-
Наличие критического коэффициента усиления определяет и пре-
дельно достижимые фазовые искажения при обработке синусоидаль-
ного сигнала. В самом деле, передаточная функция линейного диф-
ференциатора
^-W
=
Jjrrv
(^•^^^
и, следовательно, минимально достижимая постоянная времени диф-
ференциатора Т =
1/Агсг,
что, как уже указывалось при анализе RC-
цепочек, и определяет фазовые искажения. Отметим справедливость
сделанных ранее замечаний о свойствах дифференциаторов с переда-
точными функциями вида (9.14) и в этом случае.
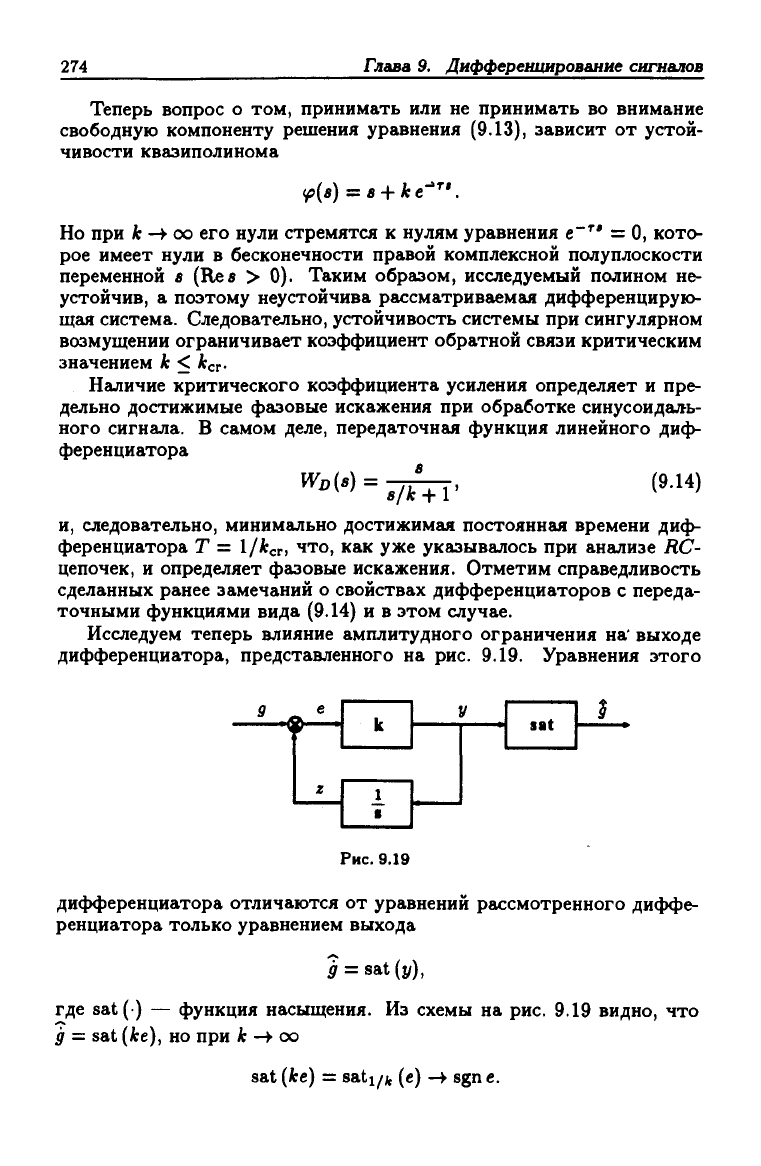
Исследуем теперь влияние амплитудного ограничения на' выходе
дифференциатора, представленного на рис. 9.19. Уравнения этого
е
9
'
г
к
1
1
У
sat
2
Рис. 9.19
дифференциатора отличаются от уравнений рассмотренного диффе-
ренциатора только уравнением выхода
J = sat (у),
где sat() — функция насыщения. Из схемы на рис. 9.19 видно, что
д = sat (ке), но при к -> оо
sat
{ке)
= sati/fc (е) -> sgne.

9.2.
Следящие дифференцирующие системы
275
Таким образом, в пределе, при к -¥ оо, наличие ограничения при-
водит к разрывному сигналу (рис. 9.20). Поэтому для получения при-
sat^^
(е)
fc — 00
eatj^^
(е)
Рис. 9.20
емлемой оценки неизбежно использование выходного фильтра Fout<
надлежащим образом "усредняющего" разрывной сигнал sgny и не-
избежно вносящего дополнительные фазовые искажения (рис. 9.21).
е
9 '
00
1
1
У
1
-1
Fout
Рис. 9.21
е
к
1
1
Рис. 9.22
sat
Далее методы усреднения исследуются подробно, здесь же огра-
ничимся замечанием, что к исходным проблемам приводит наличие
амплитудного ограничения в замкнутом контуре (рис. 9.22), когда
предельный переход
А;
—^
оо приводит к релейному дифференциатору.
К анализу свойств релейного дифференциатора теперь и переходим.
276
Глава 9. Дифференцирование сигналов
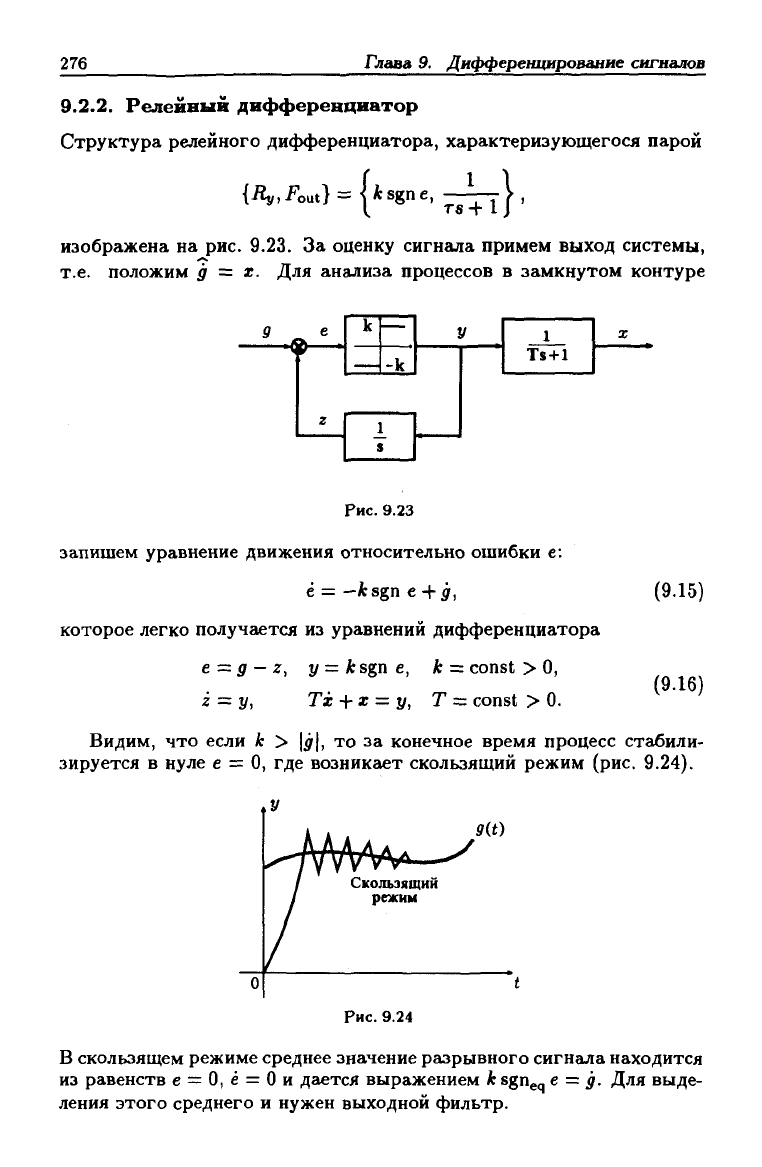
9.2.2. Релейный дифференциатор
Структура релейного дифференциатора, характеризующегося парой
{Ry, Fout] = I * sgn e, —7j \
изображена на рис. 9.23. За оценку сигнала примем выход системы,
т.е.
положим д = X. Для анализа процессов в замкнутом контуре
^ .й
'\
е
9
'
Z
к
-к
1
! t
J
1
Ts+1
X
рис. 9.23
запишем уравнение движения относительно ошибки с:
ё = -ksgn е + д,
которое легко получается из уравнений дифференциатора
e—g
—
z,
j/
= fcsgne,
А:
= const > О,
i = I/, Тх + х = у, Т = const > 0.
(9.15)
(9.16)
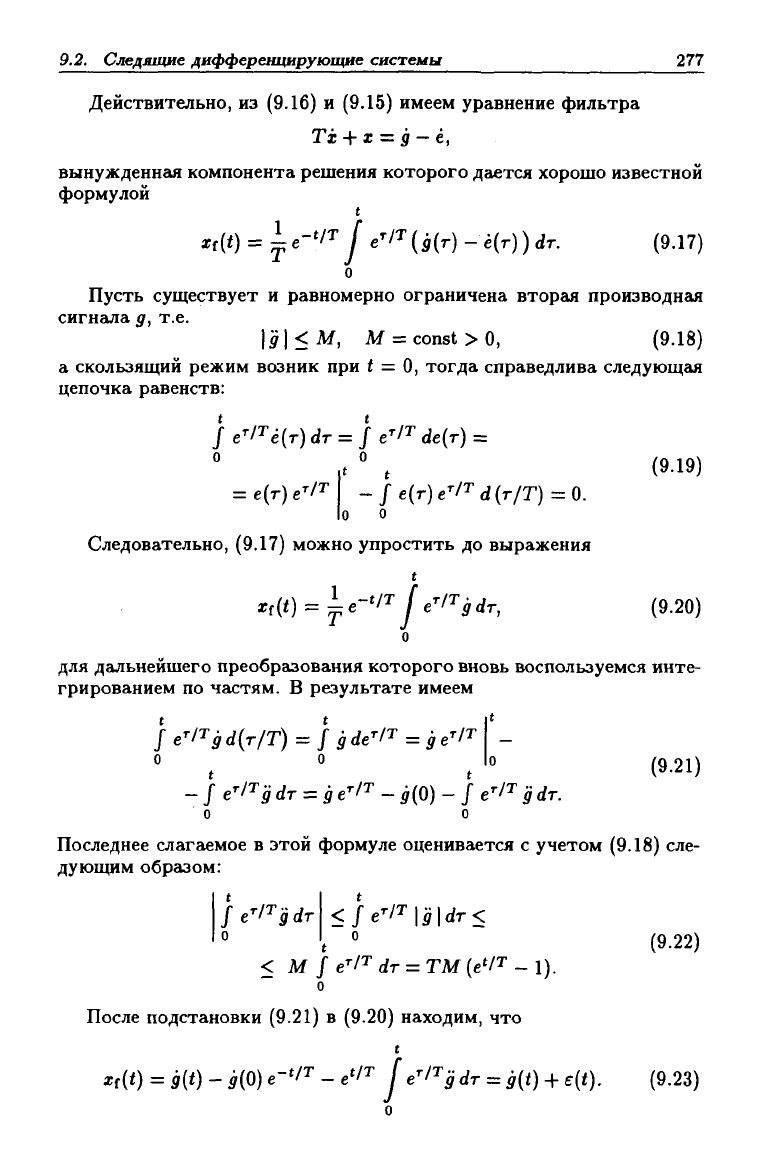
Видим, что если к > |^|, то за конечное время процесс стабили-
зируется в нуле е = О, где возникает скользящий режим (рис. 9.24).
Рис. 9.24
в скользящем режиме среднее значение разрывного сигнала находится
из равенств е = О, ё =
О
и дается выражением Arsgngq е = д. Для выде-
ления этого среднего и нужен выходной фильтр.
9.2. Следящие дифференцирующие системы
277
Действительно, из (9.16) и (9.15) имеем уравнение фильтра
Тх + х = д-ё,
вынужденнее компонента решения которого дается хорошо известной
формулой
t
x,(t)
= ^е-Ч^ J e^'^{9(r) - ё{г)) dr. (9.17)
о
Пусть существует и равномерно ограничена вторе1Я производная
сигнала д, т.е.
1
у
I
< М, М = const > О, (9.18)
а скользящий режим возник при / = О, тогда справедлива следующая
цепочка равенств:
/ е^/'Гё(г) dT = j е^/^ rfe(r) =
= е(г)е^/^
о
* t
(9.19)
о
о
/e(r)e-/^d(r/r)=0.
Следовательно, (9.17) можно упростить до выражения
с
(9.20)
для дальнейшего преобразования которого вновь воспользуемся инте-
грированием по частям. В результате имеем
je^l'^ad{rlT)=iade^l'^=ge^l'^
о о
- / e'lTg dT = g е^/^ - д(0) - / е^/^ д dr.
(9.21)
Последнее слагаемое в этой формуле оценивается с учетом (9.18) сле-
дующим образом:
j e'/'^gdr
<Je^''^\g\dT<
< M/e^/^dr = TM(e*/^-l).
о
После подстановки (9.21) в (9.20) находим, что
(9.22)
Xfit) = g{t) - д{0) е-'/^ - е"^ J е^'^д dr = g{t) + e{t). (9.23)
278
Глава 9. Дифференцироваиие сигналов
Для погрешности дифференцирования £{t) из (9.22) и неравенства
1^(0)
I
< к имеем оценку
\е{1)\<ТМ + (к + ТМ)е-*'^. (9.24)
Таким образом, окончательно получаем
\x{(t)-g(t)\<TM + (k + TM)e-*'^.
(9.25)
Для уменьшения регулярной {ТМ} и асимптотически исчезающей
{ (fc + ТМ) е~*1^ } компонент погрешности дифференцирования, как
видно из (9.25), следует уменьшать постоянную времени Т фильтра, и
в пределе при Т =
О
получим абсолютно точное дифференцирование.
Но это физически недостижимо, и причина в том, что переключения
всегда неидеальны и выбор параметра Т должен быть согласован с
этими неидеальностями.
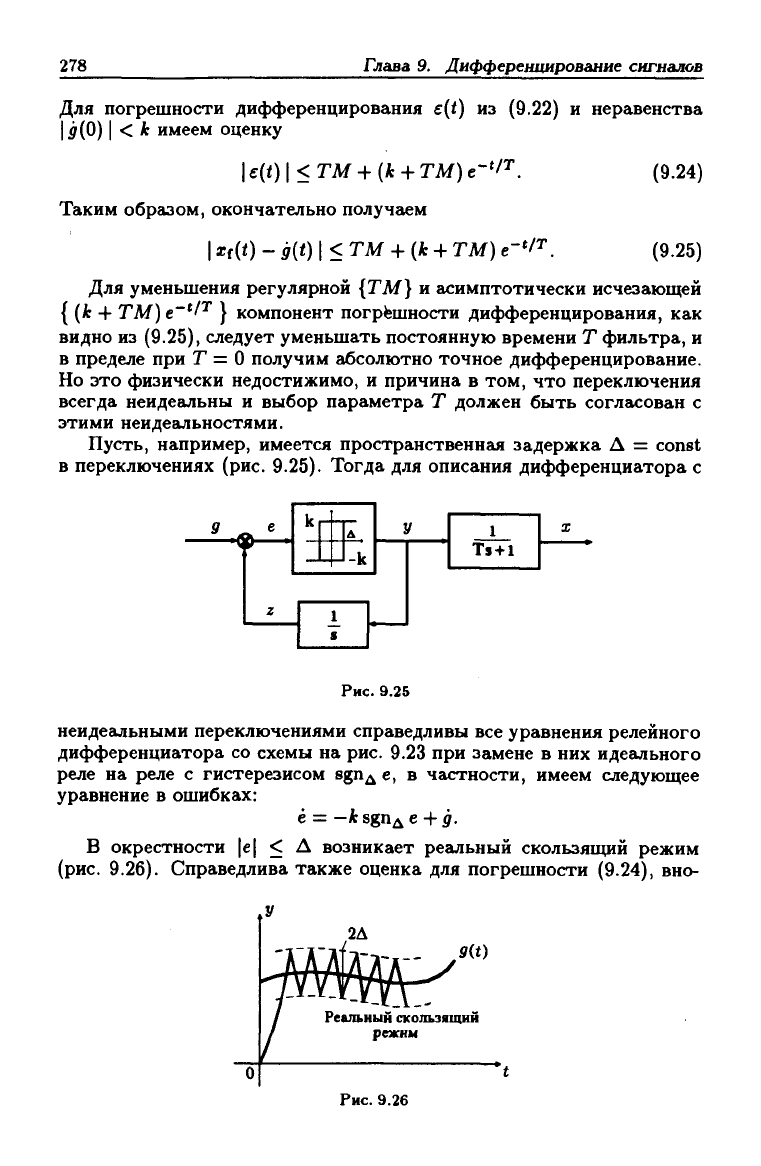
Пусть, например, имеется пространственная задержка Д = const
в переключениях (рис. 9.25). Тогда для описания дифференциатора с
\Ъ
Т$+1
Рис.
9.25
неидеальными переключениями справедливы все уравнения релейного
дифференциатора со схемы на рис. 9.23 при замене в них идеального
реле на реле с гистерезисом sgпд е, в частности, имеем следующее
уравнение в ошибках:
ё = -ksga^e-irg.
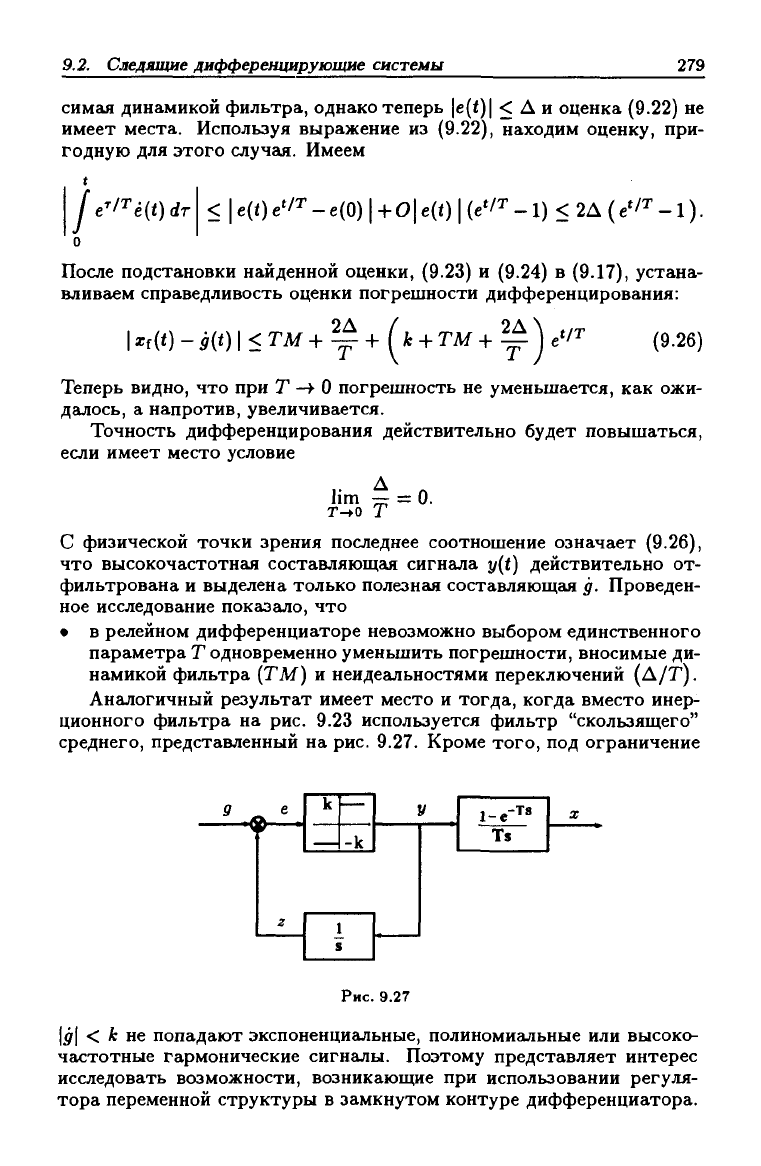
В окрестности |е| < А возникает реальный скользящий режим
(рис.
9.26). Справедлива также оценка для погрешности (9.24), вно-
Реальнын скользящий
режим
Рис.
9.26
9.2.
Следящие
дифференцирующие системы
279
симая динамикой фильтра, однако теперь
\e{t)\
< А и оценка (9.22) не
имеет места. Используя выражение из (9.22), находим оценку, при-
годную для этого случая. Имеем
1/'
,т/Т
г(<)
dT
<
I
e(t) еЧ'^ - е(0) | + 0| e{t)
\
{е"'^ - 1) < 2Д (е""^ - 1).
После подстановки найденной оценки, (9.23) и (9.24) в (9.17), устана-
вливаем справедливость оценки погрешности дифференцирования:
2А / 2А
\xf{t)-g{t)\<TM^--+(k + TM^ —
)е'/^
(9.26)
Теперь видно, что при Т ->
О
погрешность не уменьшается, как ожи-
далось, а напротив, увеличивается.
Точность дифференцирования действительно будет повышаться,
если имеет место условие
• • Д п
hm -= = 0.
т->о Т
С физической точки зрения последнее соотношение означает (9.26),
что высокочастотная составляющая сигнала y(t) действительно от-
фильтрована и выделена только полезная составляющая д. Проведен-
ное исследование показало, что
• в релейном дифференциаторе невозможно выбором единственного
параметра Т одновременно уменьшить погрешности, вносимые ди-
намикой фильтра {ТМ) и неидеальностями переключений (А/Т).
Ангшогичный результат имеет место и тогда, когда вместо инерь
ционного фильтра на рис. 9.23 используется фильтр "скользящего"
среднего, представленный на рис. 9.27. Кроме того, под ограничение
е
г
к
-к
1
!
!/
Ts
X
Рис. 9.27
1^1 <
А;
не попадают экспоненциальные, полиномиальные или высоко-
частотные гармонические сигналы. Поэтому представляет интерес
исследовать возможности, возникающие при использовании регуля-
тора переменной структуры в замкнутом контуре дифференциатора.
280
Глава 9. Дифференцирование сигналов
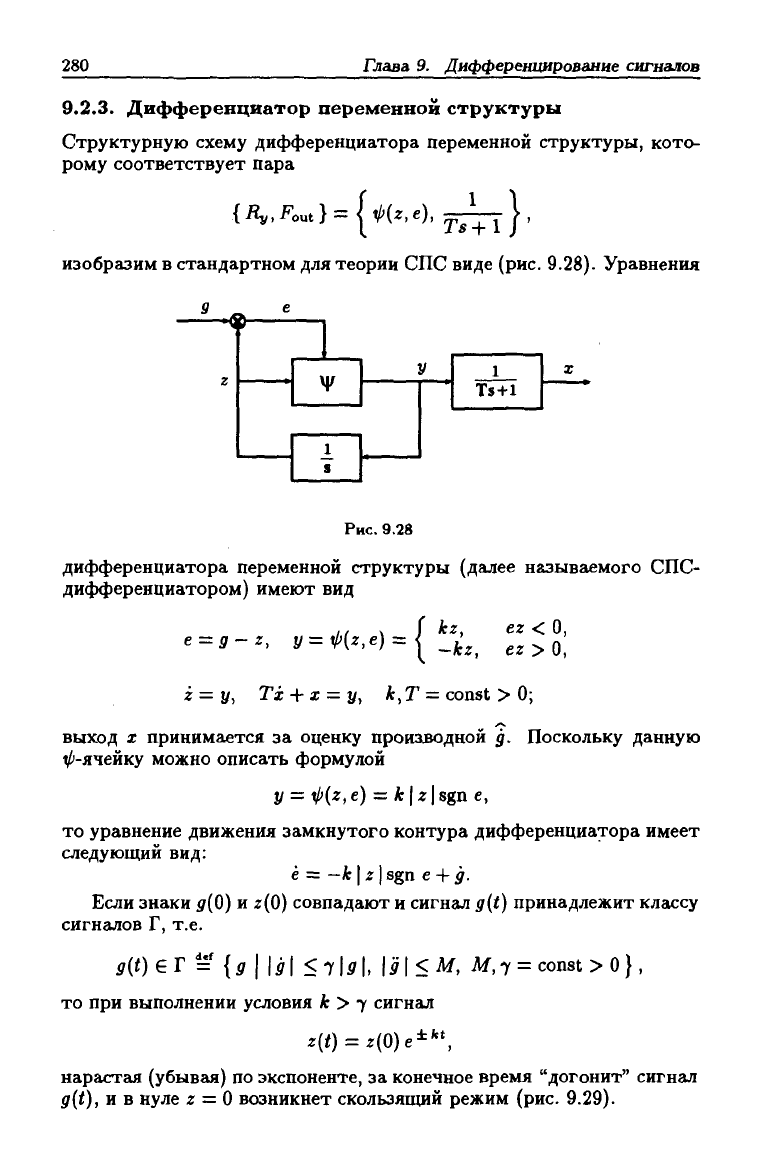
9.2.3.
Дифференциатор переменной структуры
Структурную схему дифференциатора переменной структуры, кото-
рому соответствует пара
изобразим в стандартном для теории СПС виде (рис. 9.28). Уравнения
•Ф
¥
Ts+l
Рис. 9.28
дифференциатора переменной структуры (далее называемого СПС-
дифференциатором) имеют вид
// \ f кг, ez <
e=a-z, y=i>(z,e) = i^ _^^_ ^^^
Z = у, Тх
-{•
X = у, к,Т = const > 0;
выход X принимается за оценку производной д. Поскольку данную
^-ячейку можно описать формулой
у = ipiz, e) = k\z\sgne,
то уравнение движения замкнутого контура дифференциатора имеет
следующий вид:
ё = -*г
I
г
I
sgn е
-I-
^.
Если знаки д{0) и z(0) совпадают и сигнал g{t) принадлежит классу
сигналов Г, т.е.
9{t)£T= {д\ \д\ <7|д|,
\9\<М,
М,7 = const >
О }
,
то при выполнении условия к > у сигнал
нарастая (убывая) по экспоненте, за конечное время "догонит" сигнал
g{t),
и в нуле z =
О
возникнет скользящий режим (рис. 9.29).