Емельянов С.В. Новые типы обратной связи
Подождите немного. Документ загружается.

9.5.
Нестандартные
дифференцирующие
системы
291
через конечное время в точке е =
О
возникает скользящий режим. В
этом случае эквивалентное значение разрывного сигнала определено
равенством
ksgn^qe = £,
после подстановки которого в уравнение (9.44) получаем уравнение
изменения ошибки дифференцирования
г/Г + е = т'д.
Если выполняется (9.46), то справедлива следующая оценка погреш-
ности дифференцирования:
\£(t)\<TM.
(9.48)
Из (9.47), (9.48) устанавливаем неравенство, ограничивающее снизу
величину разрывов:
it > тМ.
Выводы:
• Амплитуда разрывов в идеале может быть сделана сколь угодно
малой.
• В реальной схеме постоянного фильтра т >
Тст,
где
Тсг
определя-
ется неидеальностями переключений, поэтому амплитуда разры-
вов не может быть меньше fccr >
ТстМ.
• В рассмотренном дифференциаторе класс допустимых сигналов
расширен до сигналов с ограниченной д.
9.5.2. Нестандартный бинарный дифференциатор
Если предыдущий нестандартный дифференциатор основывался на
следящей системе, то рассматривг^емый ниже дифференциатор бази-
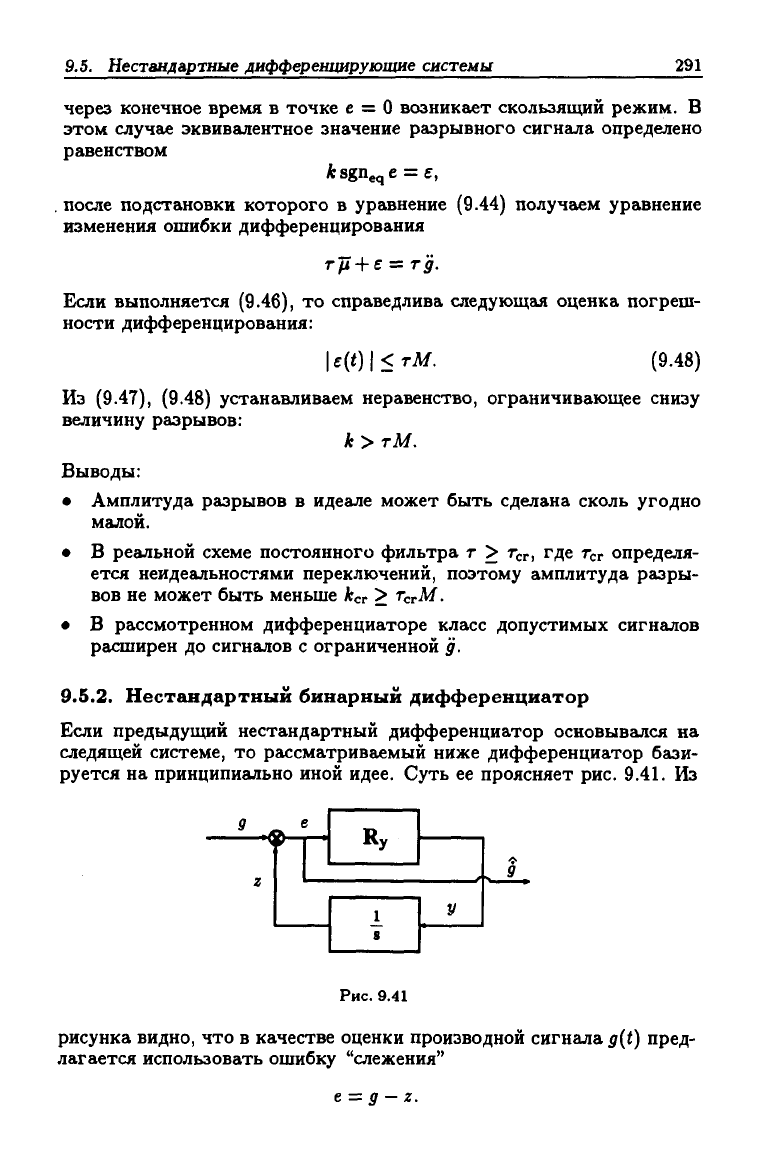
руется на принципиально иной идее. Суть ее проясняет рис. 9.41. Из
^ -
'\
с
9'
',
щ
1
S
У
Рис. 9.41
рисунка видно, что в качестве оценки производной сигнала g{t) пред-
лагается использовать ошибку "слежения"
е = д - Z.
292 Глава 9. Дифференцирование сигналов
Смысл этой идеи можно пояснить следующим образом. В стан-
дартной следящей системе е = О и выход регулятора Ну совпадает
с производной д. Если к сигналу g(t) добавляется помеха qsinut, то
на выходе регулятора имеем сигнал д + qujcosut, причем возможно,
что gw 3> 1. Поскольку на выходе регулятора всегда имеются ампли-
тудные ограничения, то они будут постоянно нарушаться и оценка
производной искажается. Поэтому возникает идея о "снятии" произ-
водной до регулятора, так как в этом случае можно рассчитывать на
уменьшение негативного влияния амплитудных ограничений.
Проведем предварительный анализ схемы на рис. 9.41. Ее описы-
вает операторное соотношение
Ли
е = д- z = д -е,
S
где S — символ операции дифференцирования. Следовательно,
Для того чтобы дифференциатор давал сколь угодно малые фазовые
и амплитудные искажения, необходимо выполнение равенства
при назначенной по произволу постоянной времени г = const > 0. Из
сравнения (9.49) и (9.50) находим требуемое для этого выражение для
оператора
Ry = {T-l)s+l. (9.51)
Из формулы (9.51) видно, что для решения этой задачи (т.е. задачи
дифференцирования) линейными средствами требуется оператор "чи-
стой" производной. Получается порочный круг, разорвать который
можно только использованием эффектов, наблюдаемых в нелинейных
системах.
Здесь уместно напомнить, что в главе б (0-теория). уже возни-
кала сходная ситуация, когда в результате использования трех типов
обратной связи (К-, КО- и 0-связей) удавалось получать оператор
вида (9.51), т.е. оператор, преобразующий ошибку регулирования xi
во взвешенную сумму ошибки и ее производной:
и =
{-к/5)
а -
i-k/S)
(ii + dxi)
Но u = fixi, и из сравнения этих выражений находим, что действие fx
эквивалентно действию оператора
Ru = i~kfS)(s + d).

9.5.
Нестандартные
дифференцирующие системы
293
Воспользуемся рекомендациями КО- и 0-теорий. В результате по-
лучим структурную схему, изображенную на рис. 9.42. В этой схеме
f
Se
1>
^' 6h ^
\9 '
1
^
'
* ' •
1 ^
3 ,^
Z
*•
е
Нд
К,
1 ^
By
1
.
1
\
tiy
Ф=
' N.
м
)
) 9
у
Рис. 9.42
следует задать операторы КО- и 0-регуляторов Д^ и Rf,, соответ-
ственно, бинарную операцию By и задатчик
Se •
Штриховкой выделен
регулятор Ry.
Если интересоваться лишь принципиальными возможностями ис-
следуемой схемы, то естественно воспользоваться результатами О-
теории и выбрать операторы R^, Rp, Se и бинарную операцию By в
виде
R^, : fi = ksgn (ге, «г = е*
—
е, к = const > О,
Rp : р = q(i, q = const > О,
Se : Те' +
СрС'
= е, с^ = с -|- ^, с = const > О,
By : J/ = ВуС = fie.
Указанный выбор продиктован следующими соображениями. Если
ошибка (т = О, то е = е* и из уравнения задатчика Se получаем
Те +
СрС
= е.
Но
Ср
= с + qfi, поэтому последнее уравнение может быть переписано
в виде
Те + {с
—
1)е = —q/ie.
294
Глава 9. Дифференцирование сигналов
Это означает, что "действие" операторной переменной ft по эффекту
эквивалентно "действию" оператора
_ Г. + (с-1)
Сравнивая это выражение с требуемым
Ry = {T-l)s+l,
получаем соотношения для расчета параметров схемы
1-г=-,
l = i^, (9.52)
Ч Я
которые нетрудно удовлетворить. В итоге получаем требуемое урав-
нение
тё
+ е= д.
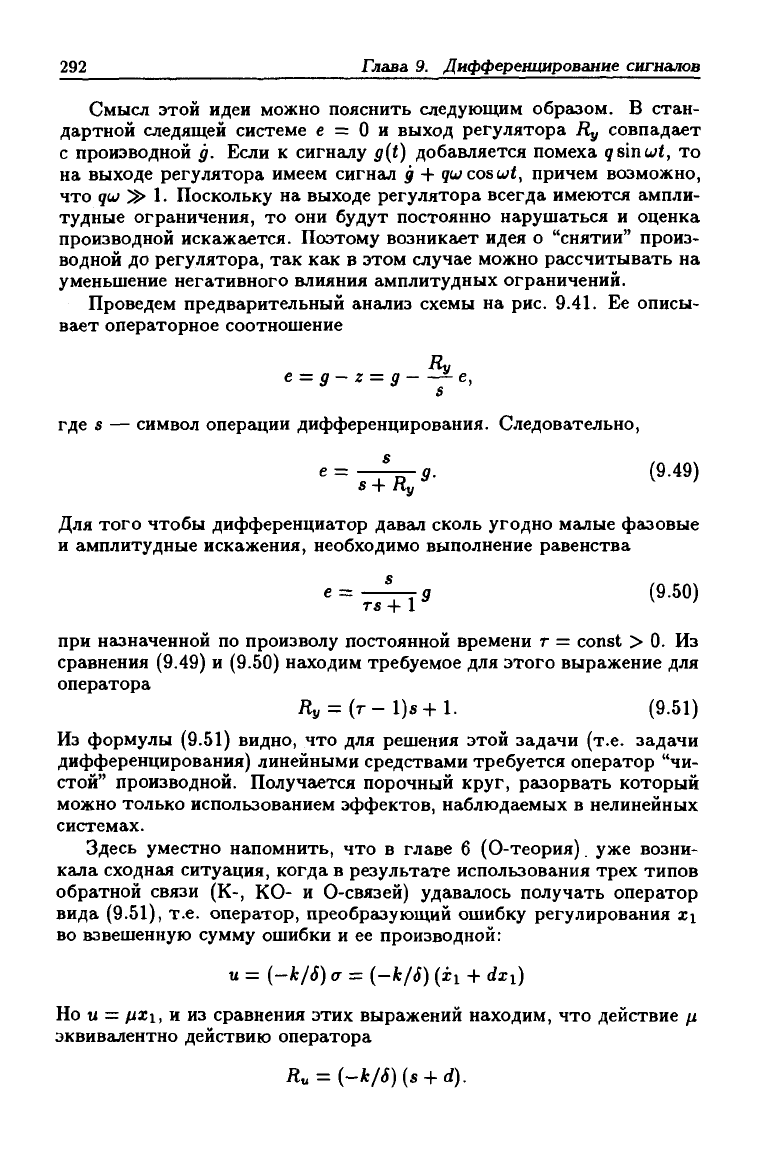
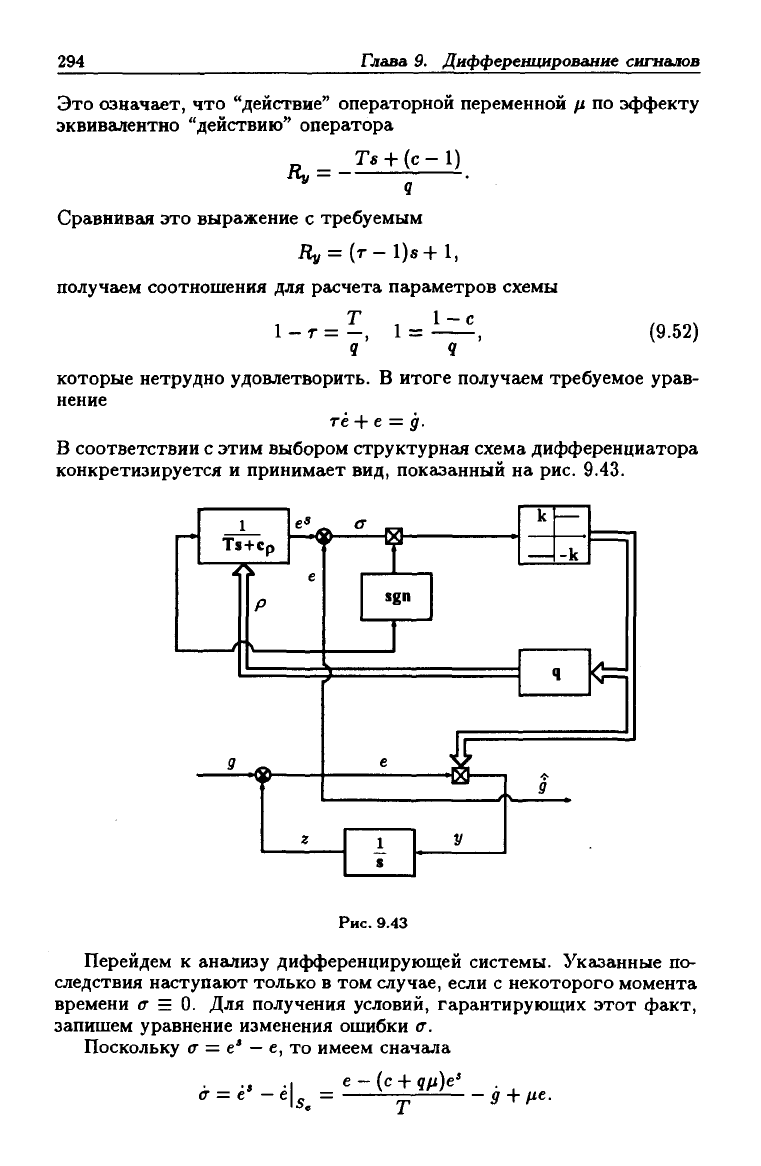
В соответствии с этим выбором структурная схема дифференциатора
конкретизируется и принимает вид, показанный на рис. 9.43.
1
Ts+cp
Р
••V
J
е
к
j^
9 «
•ч V
г
sgn
е
к
-к
1Г
1
S
Рис. 9.43
у
Ч
Ч|—1
9
Перейдем к анализу дифференцирующей системы. Указанные по-
следствия наступают только в том случае, если с некоторого момента
времени
<т
= 0. Для получения условий, гарантирующих этот факт,
запишем уравнение изменения ошибки сг.
Поскольку
(Т
= е*
—
е, то имеем сначала
(T
= e'-eL = —z~ g + fie.
9.5. Нестандартные дифференцирующие
системы
295
Но е, = ст + е, поэтому
1-е с + g/i Д g \
=
^ е ^ <т , +
^е(^1
^j.
Из соотношений (9.52) следуют равенства
1—с 1 с
1 —
9 ,9 1" g
Г ~1-г' Г~д(1-г)' Т~ 1-т' Т~
(9.53)
1
1-т'
поэтому (9.53) можно переписать в виде
е
{l-q +
q(i)(T
. г
сг
= :; JZ ; 9-
И^-.
1-г
g(l-r) " '^ 1-т-
Поскольку
^1
= к sgn
((те),
то окончательно получаем уравнение
Заметим теперь, что ничто не препятствует выбору параметра q
достаточно малым, например таким что
q{k+1)<1.
(9.55)
Тогда коэффициент (напомним, что \ft\ < к)
1-q + qfi
q{l -
т)
>0.
Для того чтобы в точке
<т
= 0 существовал скользящий режим, следует
позаботиться, как это следует из (9.54), о выполнении неравенства
<^{е
- 9 +
тд
- A;r|e|sgn (т) < 0.
По крайней мере в малой окрестности точки
<т
=
О
это условие выпол-
нено,
если
\д\
< k, (9.56)
поскольку при этом е = д.
Таким образом, если выполнены соотношения (9.55), (9.56), то при
начальных условиях из некоторой окрестности <г = О через конеч-
ное время возникает скользящий режим, поддерживающий требуемое
равенство <т = 0. Вследствие этого наступают описанные ранее бла-
гоприятные последствия, а именно:
296
Глава 9. Дифференцирование сигналов
• использование разрывной стг1билизирующей обратной связи не вле-
чет необходимости использования в данном случае "сглаживаю-
щего"
выходного фильтра, что является обязательным в других
разрывных дифференцирующих системах, однако для получения
старших производных такие "сглаживающие" фильтры могут по-
требоваться.
• ограничения на класс дифференцируемых сигналов
l^fl < const, |<;| < const
могут быть ослаблены до
< const,
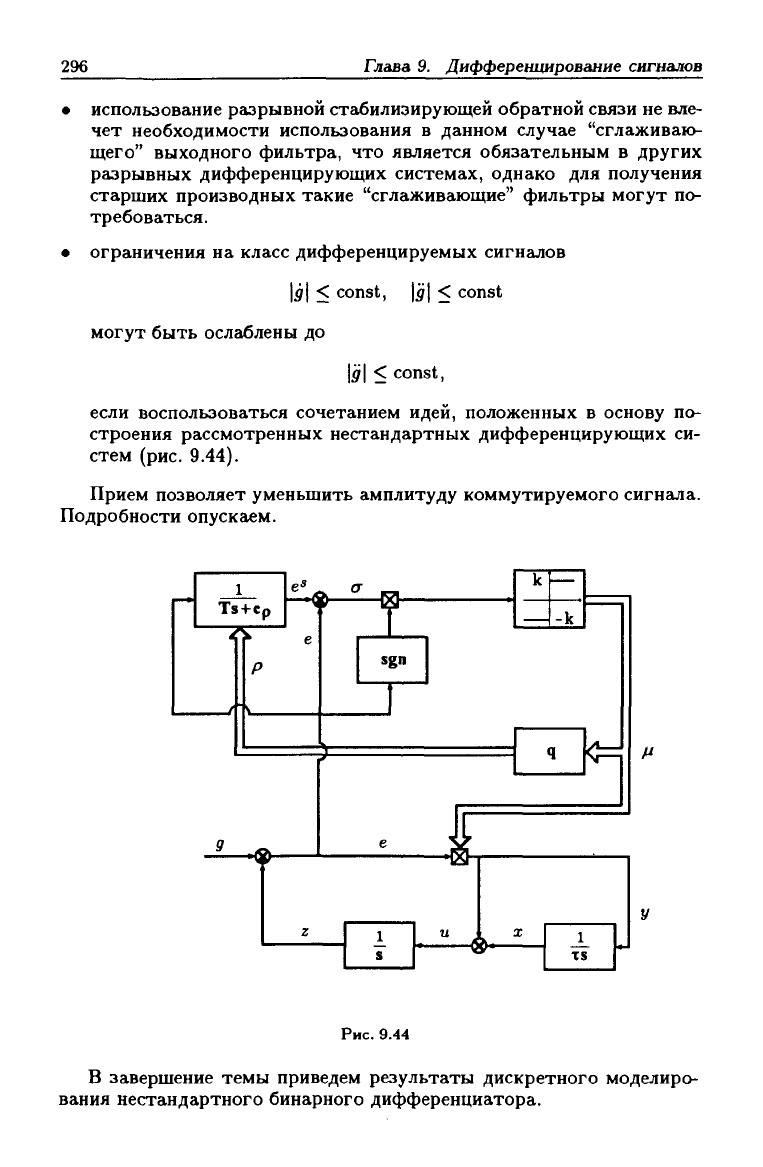
если воспользоваться сочетанием идеи, положенных в основу по-
строения рассмотренных нестандартных дифференцирующих си-
стем (рис. 9.44).
Прием позволяет уменьшить амплитуду коммутируемого сигнала.
Подробности опускаем.
1
Ts + Cr
/Л
^
^-^^на
sgn
^
Ч
<J
xs
Рис. 9.44
В завершение темы приведем результаты дискретного моделиро-
вания нестандартного бинарного дифференциатора.
9.5.
Нестандартные
дифференцирующие
системы
297
9.5.3.
Результаты дискретного моделирования
нестандартного бинарного дифференциатора
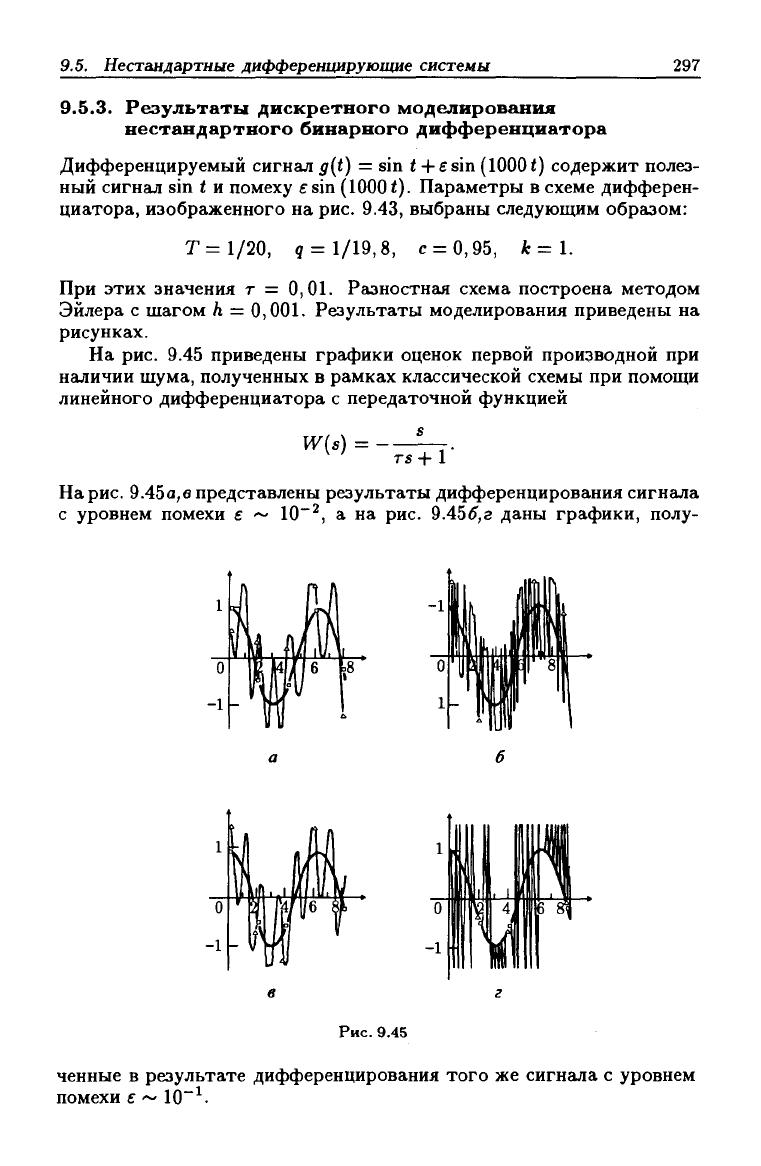
Дифференцируемый сигнгиг g{t) = sin t +
e
sin (10001) содержит полез-
ный сигнал sin t и помеху esin (1000
<).
Параметры в схеме дифферен-
циатора, изображенного на рис. 9.43, выбраны следующим образом:
Т=1/20, 9 =
1/19,8,
с = 0,95, к=1.
При этих значения т = 0,01. Разностная схема построена методом
Эйлера с шагом h =
0,001.
Результаты моделирования приведены на
рисунках.
На рис. 9.45 приведены графики оценок первой производной при
наличии шума, полученных в рамках классической схемы при помощи
линейного дифференциатора с передаточной функцией
W(s) = -
TS+1
На
рис.
9.45а,в представлены результаты дифференцирования сигнала
с уровнем помехи е -^ 10~^, а на рис. 9.456,г даны графики, полу-
1
0
-1
Мш1
1,
1
Щт
4J
Рис. 9.45
ченные в результате дифференцирования того же сигнала с уровнем
помехи е ~ 10"^.
298
Глава 9. Дифференцирование сигналов
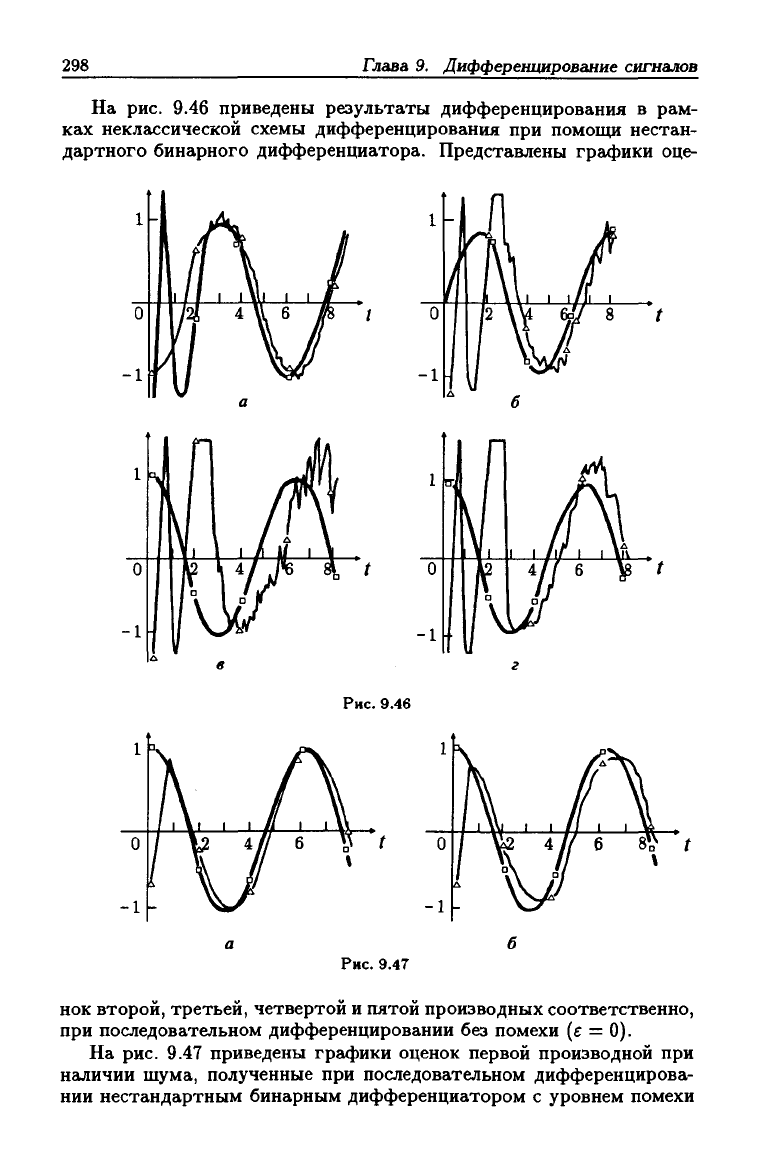
На рис. 9.46 приведены результаты дифференцирования в рам-
ках неклассической схемы дифференцирования при помощи нестан-
дартного бинарного дифференциатора. Представлены графики оце-
1
0
-1
л
i
\\
б
• '!}
/
f
8
t
t о
Рис.
9.46
-1 -
Рис.
9.47
нок второй, третьей, четвертой и пятой производных соответственно,
при последовательном дифференцировании без помехи (е = 0).
На рис. 9.47 приведены графики оценок первой производной при
наличии шума, полученные при последовательном дифференцирова-
нии нестандартным бинарным дифференциатором с уровнем помехи
9.5.
Нестандартные
дифференцирующие
системы
299
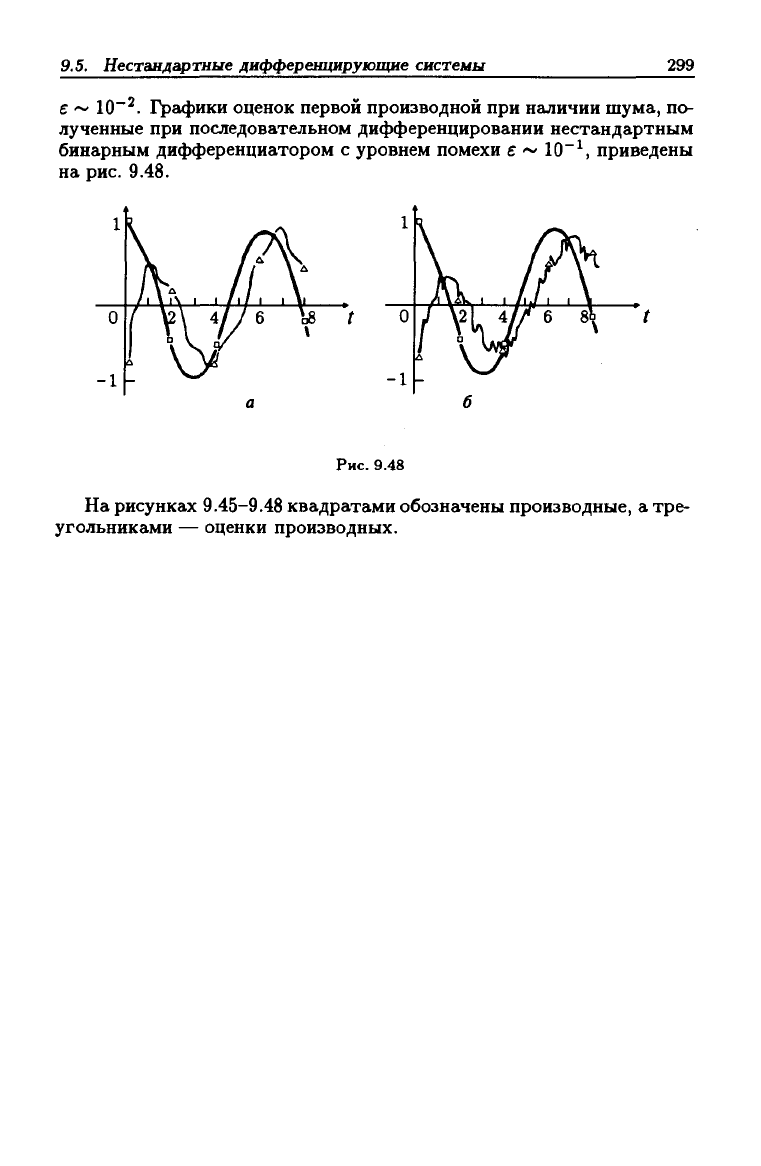
е ~ 10"^. Графики оценок первой производной при наличии шума, по-
лученные при последовательном дифференцировании нестандартным
бинарным дифференциатором с уровнем помехи е ~ 10"^, приведены
на рис. 9.48.
Рис. 9.48
На рисунках 9.45-9.48 квадратами обозначены производные, а тре-
угольниками — оценки производных.
Глава 10
Субоптимальная стабилизация
неопределенного объекта
Рассмотрим случаи, когда задача оптимальной стабилизации неопре-
деленного объекта решается точно или приближенно. Подход к реше-
нию базируется на сочетании идей оптимальной стабилизации, асим-
птотической инвариантности и теории бинарного управления. Инва-
риантность поля экстремгшей к факторам неопределенности служит
несущим элементом развиваемой конструкции. При этом от факторов
неопределенности зависит лишь оптимальная обратная связь. Для ее
приближенной реализации используются новые типы обратной связи и
методы бинарного управления. Проводится сравнение предлагаемого
подхода с известными методами: усреднения, гарантированного ре-
зультата, глубокой обратной связи и т.п.
10.1.
Постановка задачи оптимальной стабилизации
Оформление оптимальной стабилизации в самостоятельное направле-
ние теории оптимального управления в детерминированной поста-
новке уходит своими корнями к трудам А.А. Летова, Р. Беллмана,
А.А. Красовского и в стохастической постановке — к трудам Р. Кал-
мана. В результате многолетних усилий была создана теория АКОР
(аналитического конструирования оптимальных регуляторов).
Центральное место в теории АКОР занимает проблема синтеза
оптимальной обратной связи, стабилизирующей детерминированный
или стохастический объект в условиях, когда имеется полигл инфорь
мация о его поведении и ха'рактеристиках внешних сил. В реальных
условиях информация об объекте и действующих на него возмуще-
ниях всегда неполна, а так как оптимальное решение, как правило,
весьма чувствительно к вариациям условий задачи, то рекомендации
этой теории могут быть юяты только за основу и редко используются
на практике.
Возможности теории АКОР несколько расширяются при сочета-
нии ее методов с методами адаптивного управления. Внутренние
ограничения теории адаптивного управления не могли привести к
универсальным методам оптимальной стабилизации при неопределен-
ности, и потому рассматриваемая проблема сохраняет актугшьность.
Требуется новый взгляд на проблему оптимального управления при
неопределенности. В частности, представляет интерес выделение тех