Емельянов С.В. Новые типы обратной связи
Подождите немного. Документ загружается.

5.2. Алгоритмы
скольжения
2-го порядка 201
Пусть
Ti —
время
i-ro
оборота. Очевидно,
что
т;-= г'+ г
•
+
г^
+ г^
где
для
промежутков
rj (j = 1,2,3,4)
нетрудно получить выражения
.•
_
к2(<'о)|
.•
_
к2(4)1
г;
=
к2(4)1
п =
Ал
+ *2
к2(П)|
^ ki-k2'
•'
ki-k2
Используя последние соотношения, нетрудно убедиться,
что
верна сле-
дующая оценка:
1
Ti
<
ki-k2
1
(k2(4)|
+
2|<T2(4)l+k2(<i)|)
=
ifcj
_
jt2
(^ +
2v;?+«)1<Г2(4)|
=
ii±^|o^2(OI-
Поскольку
для
времени переходного процесса верна оценка сверху
1=1
ki-k2
«=i
*l-*2
1=1
и
ряд Yl "'
сходится
при /с < 1, то это и
означг1ет,
что
время
Т пе-
1=0
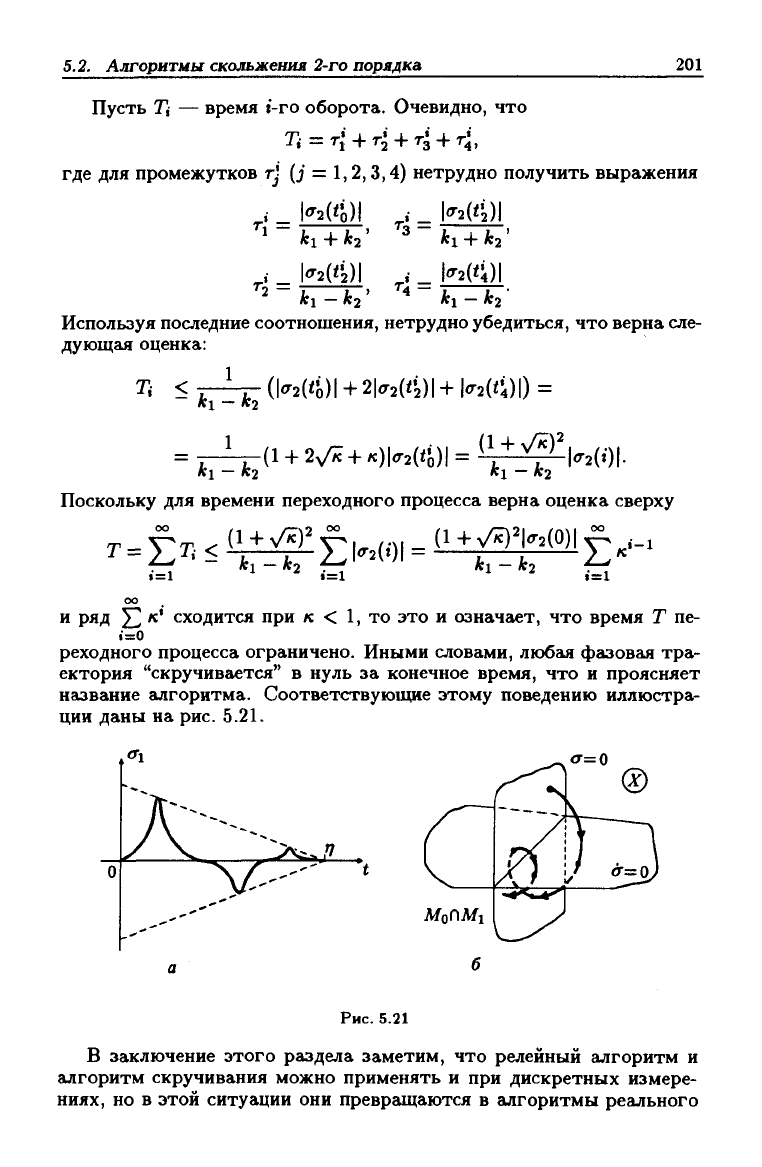
реходного процесса ограничено. Иными словами, любая фазовая тра-
ектория "скручивается"
в
нуль
за
конечное время,
что и
проясняет
название алгоритма. Соответствующие этому поведению иллюстра-
ции даны
на
рис.
5.21.
cri
<т=0
2^
^z:*^
М0ПМ1
Рис.
5.21
В заключение этого раздела заметим,
что
релейный алгоритм
и
алгоритм скручивания можно применять
и при
дискретных измере-
ниях,
но в
этой ситуации
они
превращаются
в
алгоритмы реального
202 Глава 5. Скользящие
режимы
высших порядков
скольжения 2-го порядка. Именно, пусть t,- — моменты измерения
функции (r(t) с постоянным шагом h = t.+i
—
t,-. Тогда релейный ал-
горитм реального скольжения 2-го порядка задается выражением
u{t) = д - кsgn[Si(Ti -g{(Ti{ti))], t е [ti,ti+i],
где
Si(Ti
= (Ti{ti)
—
<Ti{ti-i), a алгоритм дискретного скручивания, со-
ответственно, — выражением
u{t) = -kisgnai{ti) - k2Sgn[6i(ri], t G [<.,t.+i].
5.3.
Финитная стабилизация по выходу
Вновь рассмотрим задачу финитной стабилизации в нуле Е-систем1^
с уравнением выхода
(т
•= ai.
Удобно уравнения Е-системы свести к одному уравнению второго
порядка а = и. Зададимся обратной связью вида
и
=—kisgntr
—
r—rrjT&,
fci.fcj = const > о, (5.22)
особенность которой состоит в том, что коэффициент демпфирования
Jt2/|<^P^^
в уравнении замкнутой системы
<^+ГТГ72'^ + ''18«п<' = 0 (5-23)
неограниченно нарастает при приближении к многообразию скольже-
ния
Мо = {х\(т{х) = 0}.
Именно с этим "физическим" эффектом связаны надежды на финитно
стабилизационные возможности обратной связи (5.22).
Перейдем к анализу уравнения замкнутой системы (5.23). Прежде
всего замечаем, что при замене
<г —^ —<т
вид уравнения, а значит, и его
фг13овые траектории сохраняются, поэтому достаточно ограничиться
анализом его решений при ег > О, так как траектории в квадрантах
<т<г >
О {(Т&
< 0) подобны.
Качественно фазовые траектории исследуемого уравнения
•^
+ ПлП^ + fci sgn
от
=
О
5.3.
Фгшитная
стабилизация по выходу
203
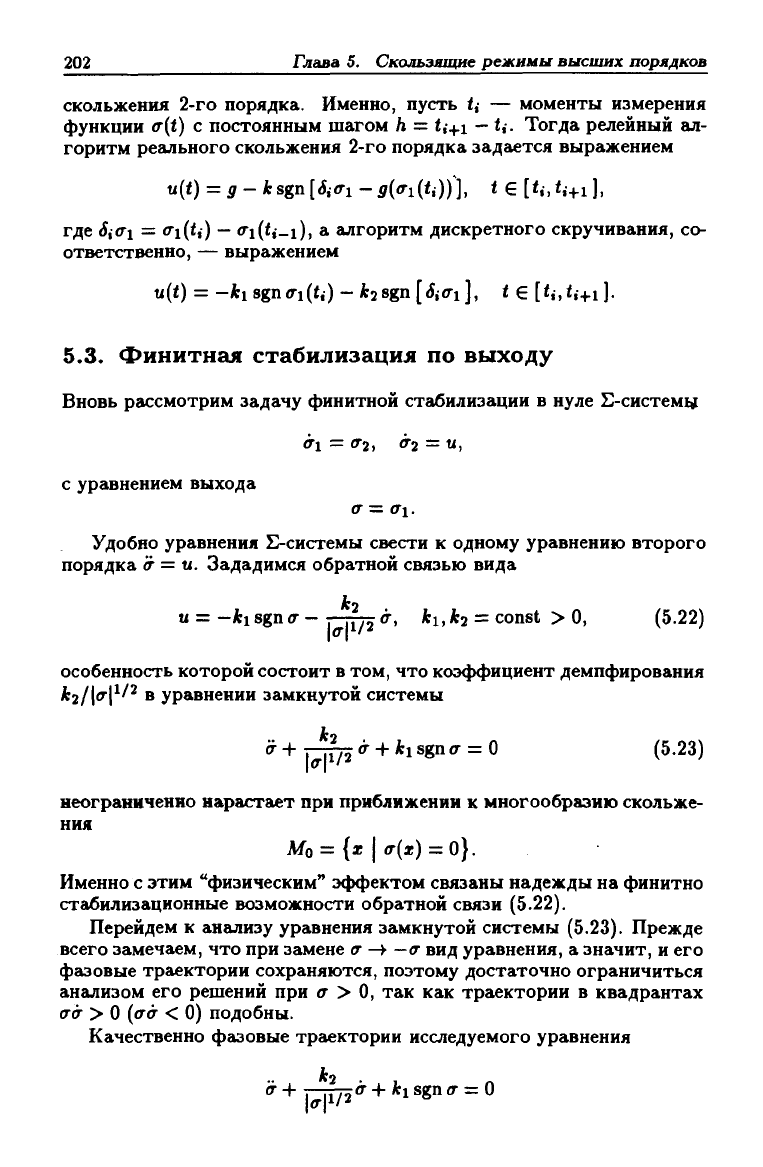
представлены на рис. 5.22, на котором
&о
— начальное значение ско-
рости,
СГ2
— точка второго пересечения фазовой траектории с осью
<т
=
О
(т.е. второго пересечения многообразия Мо), &, = <т(<») — ми-
нимальное значение скорости на интервале движения [<i,<2]. где <i —
момент обнуления скорости & (т.е. момент максимального удаления
изображающей точки от многообразия Мо), <2 — момент попадания
на Мо. При
<т
>
О
имеем дело с уравнением
ff + —^& + ki = О,
л/cr
которое нетрудно преобразовать к виду
а затем, так как при < = О верны равенства
&(0) =
&о,
<т(0) = О, после интегрирования по-
лучаем соотношение
Рис.
5.22
&
+ kit +
2k2<T^^^
=
(ro.
(5.24)
При
<
=
<1
из (5.24) находим (учитывая, что <T(<I) = 0)
kiti + 2/r2<Tj = &о.
Поскольку ti > О, то из последнего равенства имеем первое из необ-
ходимых нам далее неравенств, именно:
1/2 <Го
(5.25)
Подставим t = t» в (5.23). Тогда, учитывая, что
<T(t,)
= О, получим
равенство
L • 1 L 1/2 n 1/2 ^^2 .
k2a;+ki(T,' =0, или <т, =
—
—-о-,.
ki
Но очевидно (рис. 5.22), что а» <a-i, &, <
&2,
а поэтому из последнего
равенства получаем цепочку неравенств
1/2 .^ 1/2 *2/ •
N
^ ^^2/ .V
из которых можно извлечь второе из требуемых соотношений, именно:
-&2 < Р-(г\'\ (5.26)
«2
204 Глава 5. Скользящие
режимы
высших порядков
После подстановки (5.25) в (5.26) получаем следующее неравенство
между скоростями двух последовательных пересечений многообразия
скольжения MQ:
&о ^ 2Jfc2-
в силу отмеченной выше симметрии уравнений замкнутой системы
аналогичное неравенство имеет место для любых двух последователь-
ных моментов пересечения многообразия MQ, т.е. справедливо нера-
венство
<!•
Отсюда получаем оценку вида |<т,| < 7'|'''о|> и если выполнено условие
7= — <1
то стабилизируемость доказана, так как при этом
|(7,|
->^ О, < -)• 00,
а из неравенств типа (5.25) следует также, что и
|<г,| -> О,
<
-> оо,
где at — максимумы отклонений от многообразия скольжения
MQ
•
Докажем теперь, что время переходного процесса конечно. Для
этого подставим t = t2 в уравнение (5.24). Получим равенство
и, следовательно, для промежутка времени Ti = f2
— О
между двумя
пересечениями многообразия
MQ
имеет место следующая оценка:
&0-&2 1+7
Jl — '2 — Г < О-О—, .
«1 «1
Естественно, что аналогичная оценка справедлива для каждого 1-го
интервала, т.е.
«1
Но время Т переходного процесса конечно, так как в неравенстве
1 + 7
i=l ' 1 = 1
^=Е^.<т^Е1'-1
*1
по докгизанному ранее
|<г.|<
71^.-11,
0<7<1,
оо
и, значит, ряд Y1 \'^i\ ограничен.
«•=1
5.3.
Финитная стабилизация
по выходу
205
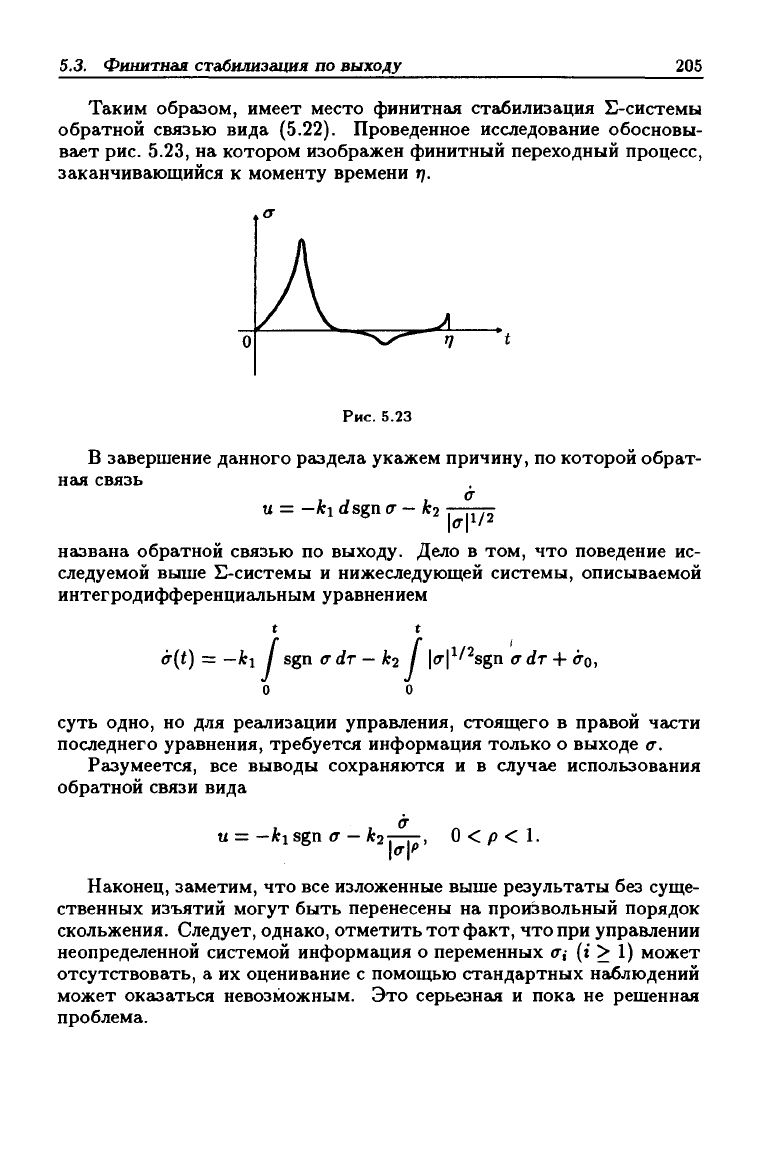
Таким образом, имеет место финитная стабилизация S-системы
обратной связью вида (5.22). Проведенное исследование обосновы-
вает рис. 5.23, на котором изображен финитный переходный процесс,
заканчивающийся к моменту времени
т).
Рис.
5.23
в завершение данного раздела укажем причину, по которой обрат-
ная связь
и = —ki dsgn
<r —
^2
|^|l/2
названа обратной связью по выходу. Дело в том, что поведение ис-
следуемой выше Е-системы и нижеследующей системы, описываемой
интегродифференциальным уравнением
f t
&{t) = —ki I sgn crdr
—
k^ I \(r\^'^sgn adr + ao,
0 0
суть одно, но для реализации управления, стоящего в правой части
последнего уравнения, требуется информация только о выходе
<т.
Разумеется, все выводы сохраняются и в случае использования
обратной связи вида
и = -kisgn(T-k27-r-,
О
</)<!.
Наконец, заметим, что все изложенные выше результаты без суще-
ственных изъятий могут быть перенесены на произвольный порядок
скольжения. Следует, однако, отметить тот факт, что при управлении
неопределенной системой информация о переменных (Т,- (г > 1) может
отсутствовать, а их оценивание с помощью стандартных наблюдений
может оказаться невозможным. Это серьезная и пока не решенная
проблема.
Глава 6
Теория операторной обратной связи
в данной главе свойства систем стабилизации из главы 3 улучшаются
путем использования дополнительной нелинейной обратной связи опе-
раторного типа. Напомним, что "по легенде" операторная обратная
связь должна обеспечить "сближение" динамических свойств задат-
чика и системы управления с координатной и координатно-оператор-
ной обратными связями. Подобное сближение требуется осуществить
без использования какой-либо информации о факторах неопределен-
ности, а только путем установления дополнительной нелинейной связи
между переменными системы. Результатом использования такой не-
линейной связи должно быть повышение качества переходных процес-
сов и уменьшение их зависимости от факторов неопределенности.
6.1.
О назначении операторной обратной связи
В теории координатно-операторной обратной связи (глава 4) рассмо-
трены различные алгоритмы стабилизации простейшего неопределен-
ного объекта
i = 2d^ +
b(ji
+ a (6.1)
с неизвестными параметрами, принадлежащими известным множе-
ствам
а£А, ЬеВ.
Одним из наиболее эффективных и простых в реализации оказался
пропорционально-интегргшьно-релейный закон стабилизации
sgni dt, (6.2)
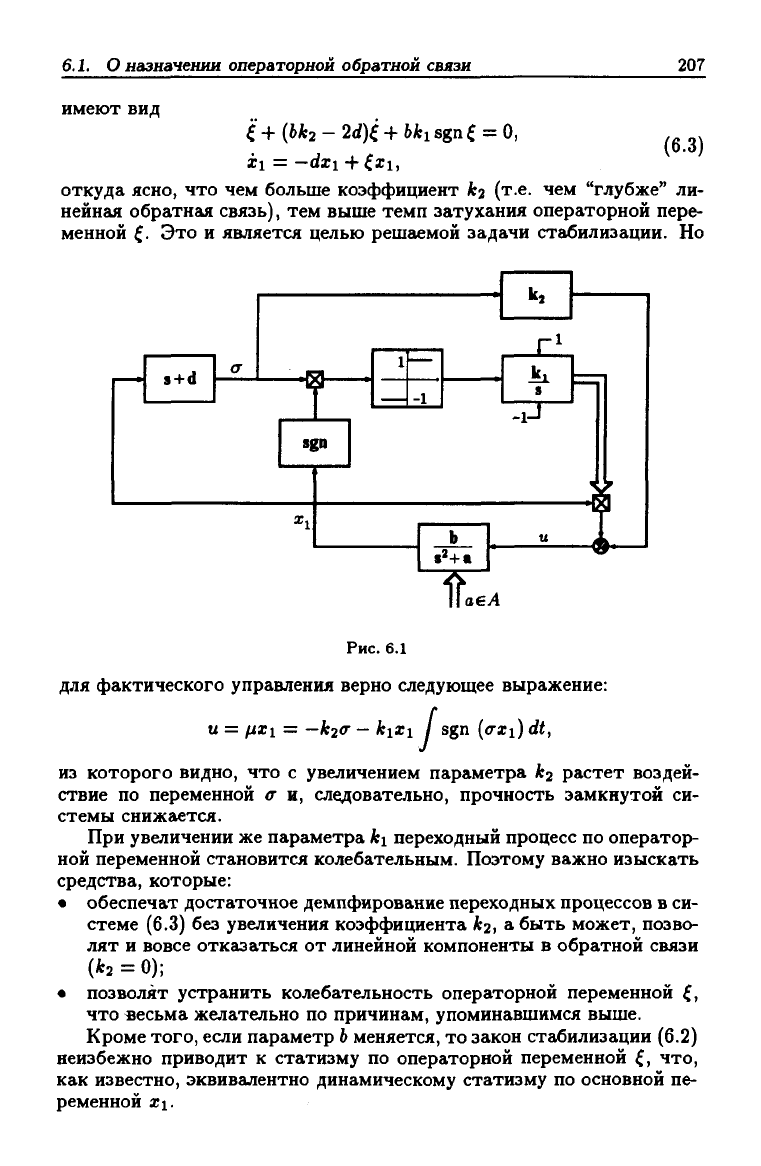
где ki,k2 — фиксированные параметры обратной связи. Структурная
схема соответствующей замкнутой системы (6.1), (6.2) приведена на
рис.
6.1 (смысл стрелок на интеграторе в законе (6.2) будет пояснен
позднее). Уравнения движения замкнутой системы в пределах линей-
ной зоны интегратора (рис. 6.1) и при постоянных параметрах а и
Ь в координатно-операторном пространстве следуют из (6.1), (6.2) и
6.1.
о назначении
операторной обратной
связи
207
(б.З)
имеют вид
^ + (6*2 - 2d)i +
6*1
sgn^ = О,
xi = —dxi +^xi,
откуда ясно, что чем больше коэффициент jfcj (т.е. чем "глубже" ли-
нейная обратная связь), тем выше темп затухания операторной пере-
менной ^. Это и является целью решаемой задачи стабилизации. Но
t
» + d
а
•V.
г
sgn
^\
1-
-1
к»
Г'
S
.,J
b
»
Ч«
•^
. .
Р
>,
f
аеЛ
Рис. 6.1
для фактического управления верно следующее выражение:
и = fixi =
—к2(г
- kixi / sgn
{(TXi)
dt,
из которого видно, что с увеличением параметра *2 растет воздей-
ствие по переменной <т и, следовательно, прочность замкнутой си-
стемы снижается.
При увеличении же параметра к\ переходный процесс по оператор-
ной переменной становится колебательным. Поэтому важно изыскать
средства, которые:
• обеспечат достаточное демпфирование переходных процессов в си-
стеме (6.3) без увеличения коэффициента ki, а быть может, позво-
лят и вовсе отказаться от линейной компоненты в обратной связи
(*2 = 0);
• позволят устранить колебательность операторной переменной ^,
что «есьма желательно по причинам, упоминавшимся выше.
Кроме того, если параметр 6 меняется, то закон стабилизации (6.2)
неизбежно приводит к статизму по операторной переменной ^, что,
как известно, эквивалентно динамическому статизму по основной пе-
ременной XI.
208
Глава 6. Теория
операторной
обратной связи
Отметим, без подробного комментария, что изменения параметра
а с ограниченной скоростью, т.е. когда
\а\ < const < bki,
закон (6.2) допускает. В связи с этим возникает вопрос о принци-
пиальной достижимости сформулированных выше целей упраления и
путях их достижения.
Можно, конечно, анализируя уравнение (6.1)
^ =
2d^
+
bn
+ а,
попытаться угадать соответствующий алгоритм стабилизации опера-
торной переменной ^ в нуле, что, конечно, возможно. Но кажется бо-
лее предпочтительным попытаться воспользоваться рекомендациями
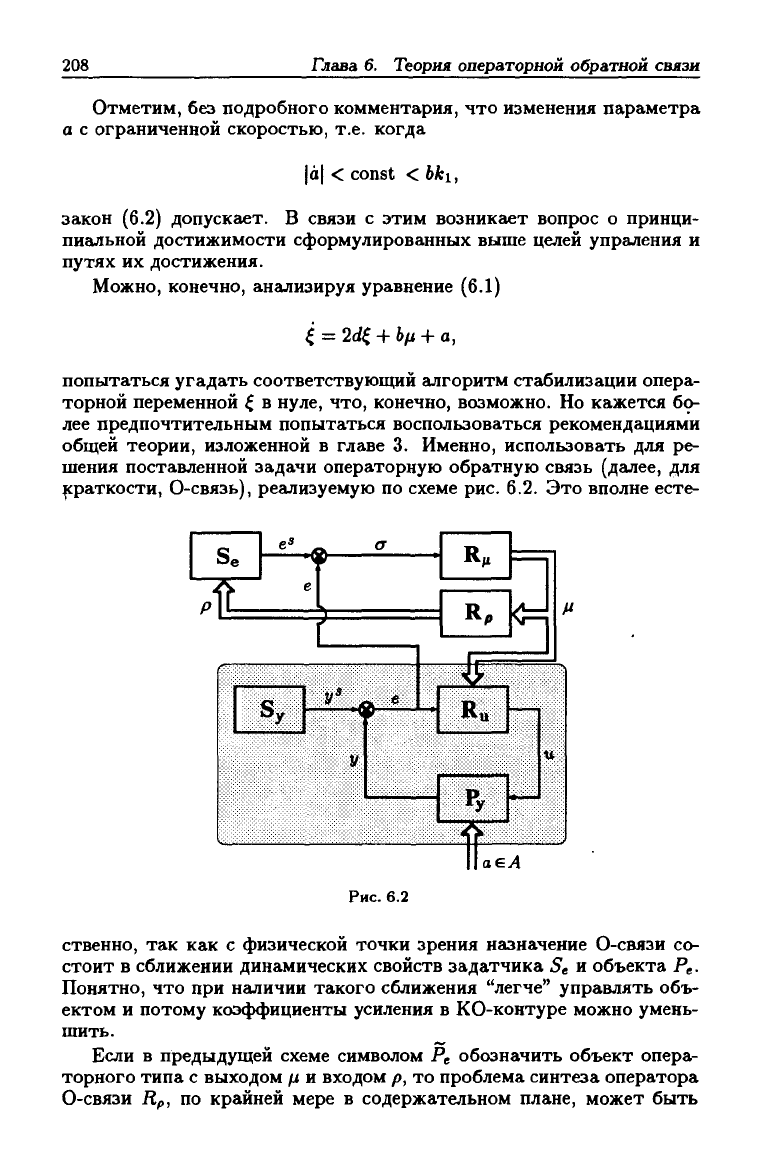
общей теории, изложенной в главе 3. Именно, использовать для ре-
шения поставленной задачи операторную обратную связь (далее, для
краткости, 0-связь), реализуемую по схеме рис. 6.2. Это вполне есте-
Рис.
6.2
ственно, так как с физической точки зрения назначение 0-связи со-
стоит в сближении динамических свойств задатчика 5е и объекта Р^.
Понятно, что при наличии такого сближения "легче" управлять объ-
ектом и потому коэффициенты усиления в КО-контуре можно умень-
шить.
Если в предыдущей схеме символом Ре обозначить объект опера-
торного типа с выходом
/л
и входом р, то проблема синтеза оператора
0-связи Rp, по крайней мере в содержательном плане, может быть
6.2.
Уравнения движения
209
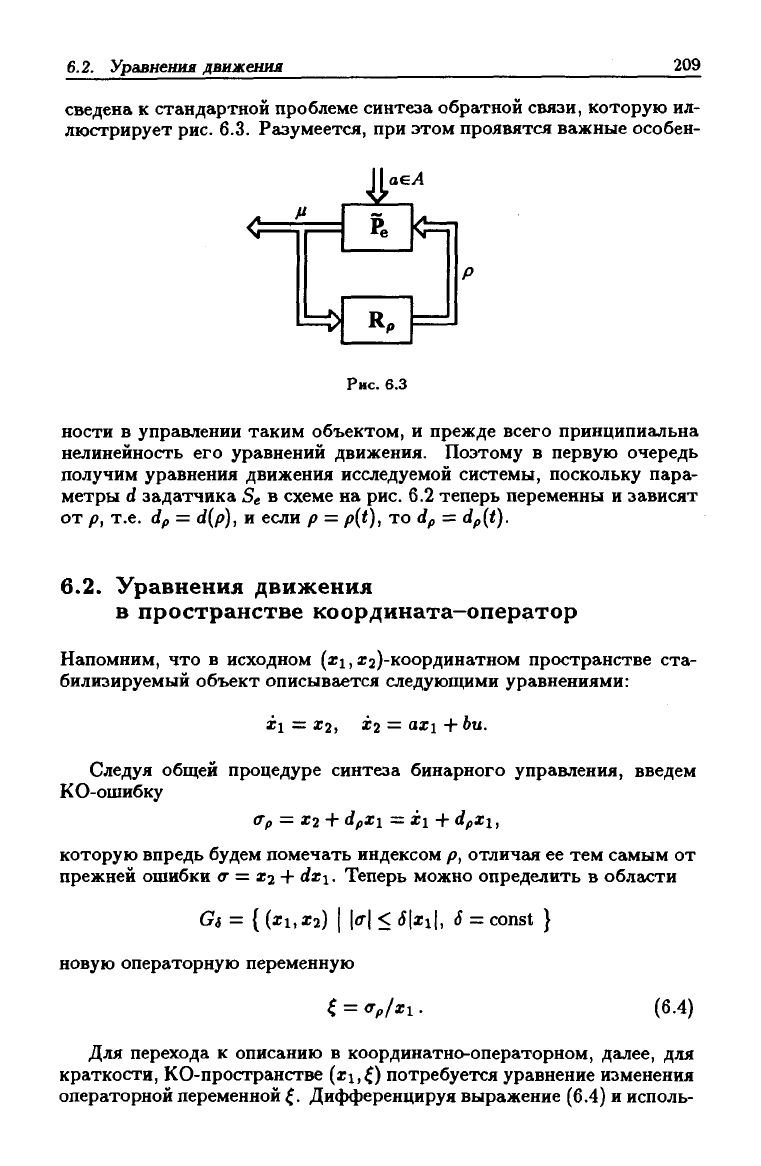
сведена к стандартной проблеме синтеза обратной связи, которую ил-
люстрирует рис. 6.3. Разумеется, при этом проявятся важные особен-
.1—^
S
1
ц
Р ^ •
Rp
Рис.
6.3
ности В управлении таким объектом, и прежде всего принципиальна
нелинейность его уравнений движения. Поэтому в первую очередь
получим уравнения движения исследуемой системы, поскольку пара-
метры d эадатчика Se в схеме на рис. 6.2 теперь переменны и зависят
от р, т.е. dp = d{p), и если р = p{t), то dp = dp{t).
6.2. Уравнения движения
в пространстве координата-оператор
Напомним, что в исходном (ri, а;2)-координатном пространстве ста-
билизируемый объект описывается следующими уравнениями:
XI = Х2, Х2 = axi + bu.
Следуя общей процедуре синтеза бинарного управления, введем
КО-ошибку
сГр
=
Х2
+ dpXi = xi + dpXi,
которую впредь будем помечать индексом р, отличая ее тем самым от
прежней ошибки
<г
= хз + dxi. Теперь можно определить в области
Gs = { (хьагз) I
\<г\
<
5\xi\,
S = const }
новую операторную переменную
^ =
сгр/х1.
(6.4)
Для перехода к описанию в координатно-операторном, далее, для
краткости, КО-пространстве («i,^) потребуется уравнение изменения
операторной переменной ^. Дифференцируя выражение (6.4) и исполь-
X2
Xl
Zf.
Xl
=
"p
- dpXi _
Xl
210 Глава 6. Теория
операторной обратной
связи
зуя равенства х^ = ахх + Ь«,
Х2
=
<Гр —
dpXi, имеем последовательно:
с _ ^Р "'р *1 _ iC2 + dpX2 + dpXl ^
Xl Xi Xi Xi
_ axi + bu +
dp(Tp
- rfjzi + dpXi
~ Xl
= 2rf^ + 6—+ (a-rf2)+d^_^2.
Xl
Если, как и ранее, использовать в главном контуре простейшую
бинарную операцию и = fixi и рассматривать стабилизацию в малом,
когда можно пренебречь квадратичными членами, то искомые урав-
нения можно записать в следующем виде:
xi — -dpXi+ixi,
i = 2dp( + bp + a-dj + dp. ^ • '
Эти уравнения отличаются от применявшихся ранее уравнений
xi = -dxi+^xi,
i = 2d( + bfi + a-d^
зависимостью параметра d задатчика Se от операторной переменной
р и наличием производной dp^O ъ правой части (6.5), так как теперь
dp = dp{t). Поскольку 0-закон (т.е. функцию р) можно формировать
независимо от КО-закона (т.е. функции (х), постольку член dp, по
существу, можно интерпретировать как дополнительное управление,
привлекаемое для стабилизации 0-переменной ^ в нуле.
Практически, однако, удобно синтезировать не производную dp,
а при выбранной функциональной зависимости d{p) (например, без
потери общности, в виде dp = d + р) оператор 0-связи Rp (рис.6.2) и,
в отдельных случаях, оператор КО-связи R,,.
Для дальнейшего упрощения уравнения Ре-объекта (рис. 6.3) и по-
лучения его окончательного вида будем считать, что при всех из-
менениях параметр р мал по отношению к d. Это предположение
вполне оправдано, более того, нужно стремиться к его обеспечению,
поскольку в желаемом режиме стабилизации, когда 'р = О, основная
переменная xi изменяется, согласно (6.5), в соответствии с уравне-
нием
Xl = -dpXi = -{d + p)xi.
Тогда качество переходного процесса близко к эталонному, опре-
деляемому уравнением ij = —dxi, если выполнено упомянутое выше
соотношение порядка между параметрами dn р. Но если принять это
допущение, то можно приближенно заменить
dp = (d + p)^d^ + 2dp.