Емельянов С.В. Новые типы обратной связи
Подождите немного. Документ загружается.

2.3.
Стабилизация регулятором переменной структуры
121
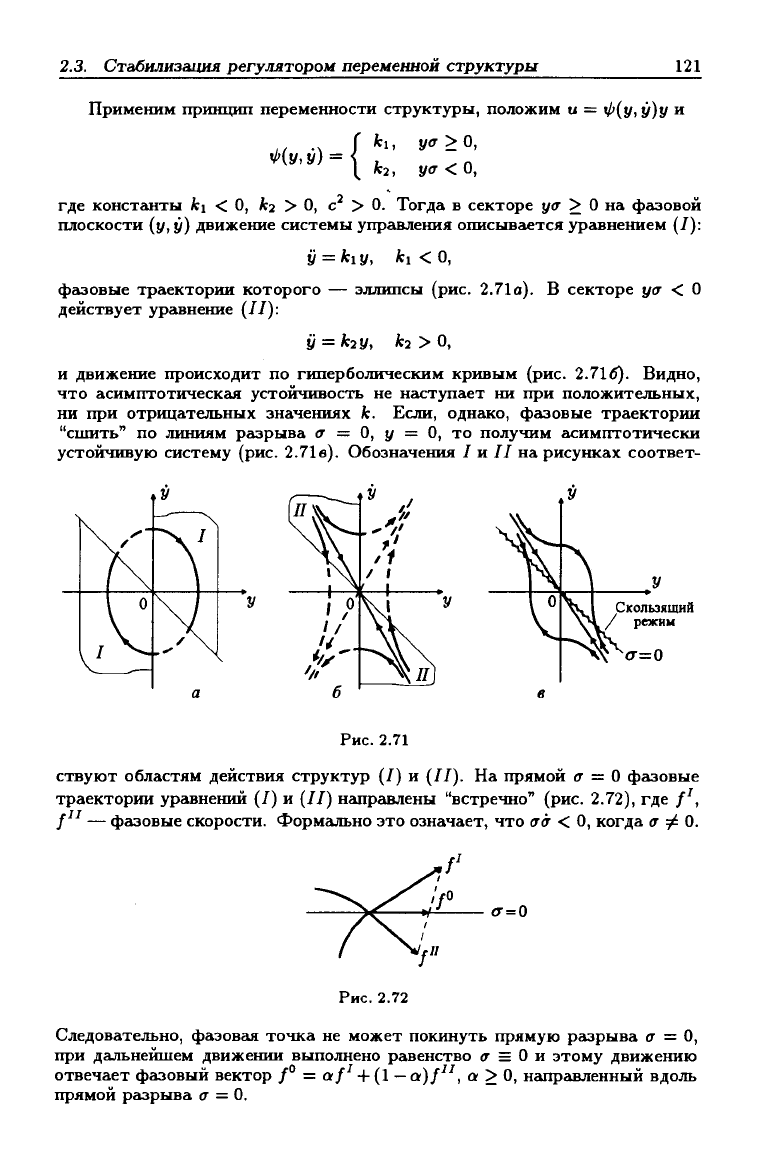
Применим принцип переменности структуры, положим и = ф{у, у)у и
уа >0,
У<т<0,
0(у,у) =
|
ll[
где константы fci < О, ^2 > О, с > 0. Тогда в секторе уи > О на фгьзовой
плоскости (у, у) движение системы управления описывается ургшнением (/):
у = fciy, ki < О,
фазовые траектории которого — эллипсы (рис. 2.71а). В секторе
у/т
< О
действует уравнение (//):
у = к2у, к2 > О,
и движение происходит по гиперболическим кривым (рис. 2.716). Видно,
что асимптотическсш устойчивость не наступает ни при положительных,
ни при отрицательных значениях к. Если, однако, фазовые траектории
"сшить" по линиям разрыва (т = О, у = О, то получим асимптотически
устойчивую систему (рис.
2.71
в).
Обозначения / и // на рисунках соответ-
Скользяший
/ режим
Рис.
2.71
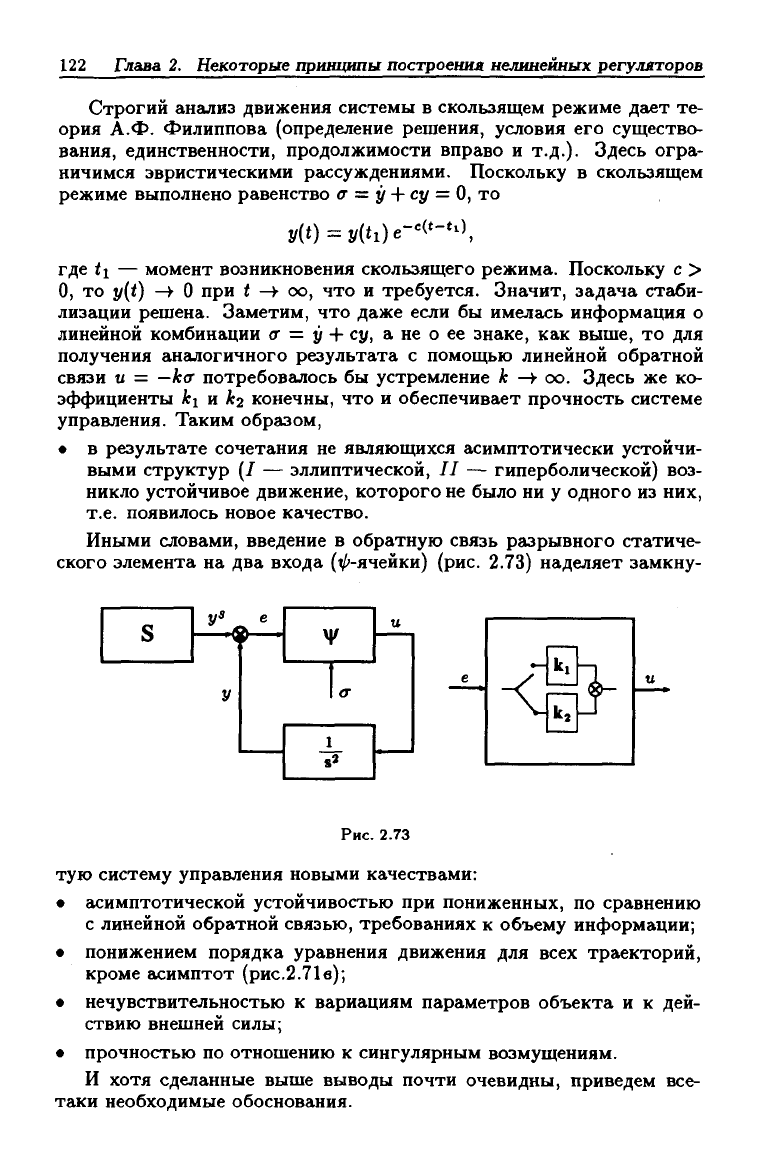
ствуют областям действия структур (/) и (//). На прямой (Т = О фазовые
траектории уравнений (7) и (//) направлены "встречно" (рис. 2.72), где f',
f'^ — фазовые скорости. Формгъльно это означает, что
(г&
< О, когда
(Т
/ 0.
о-=0
Рис.
2.72
Следовательно, фазовгш точка не может покинуть прямую разрыва (Т = О,
при дальнейшем движении выполнено равенство и = О и этому движению
отвечает фазовый вектор f" = af' + (1
—
а)/'\ о >0, направленный вдоль
прямой разрыва а = 0.
122 Глава 2. Некоторые принципы
построения
нелинейных регуляторов
Строгий ангииз движения системы в скользящем режиме дает те-
ория А.Ф. Филиппова (определение решения, условия его существо-
вания, единственности, продолжимости вправо и т.д.). Здесь огра-
ничимся эвристическими рассуждениями. Поскольку в скользящем
режиме выполнено равенство
<т
= у + су =
О,
то
I/(t) = i/(ti)e-«(*-*0,
где ti — момент возникновения скользящего режима. Поскольку с >
О, то y{t) -^ О при t —> оо, что и требуется. Значит, задача стаби-
лизации решена. Заметим, что даже если бы имелась информация о
линейной комбинации
<г
= у + су, а не о ее знаке, как выше, то для
получения аналогичного результата с помощью линейной обратной
связи и =
—к<т
потребовалось бы устремление к
—^
оо. Здесь же ко-
эффициенты fci и
Аг2
конечны, что и обеспечивает прочность системе
управления. Таким образом,
• в результате сочетания не являющихся асимптотически устойчи-
выми структур (/ — эллиптической, // — гиперболической) воз-
никло устойчивое движение, которого не было ни у одного из них,
т.е.
появилось новое качество.
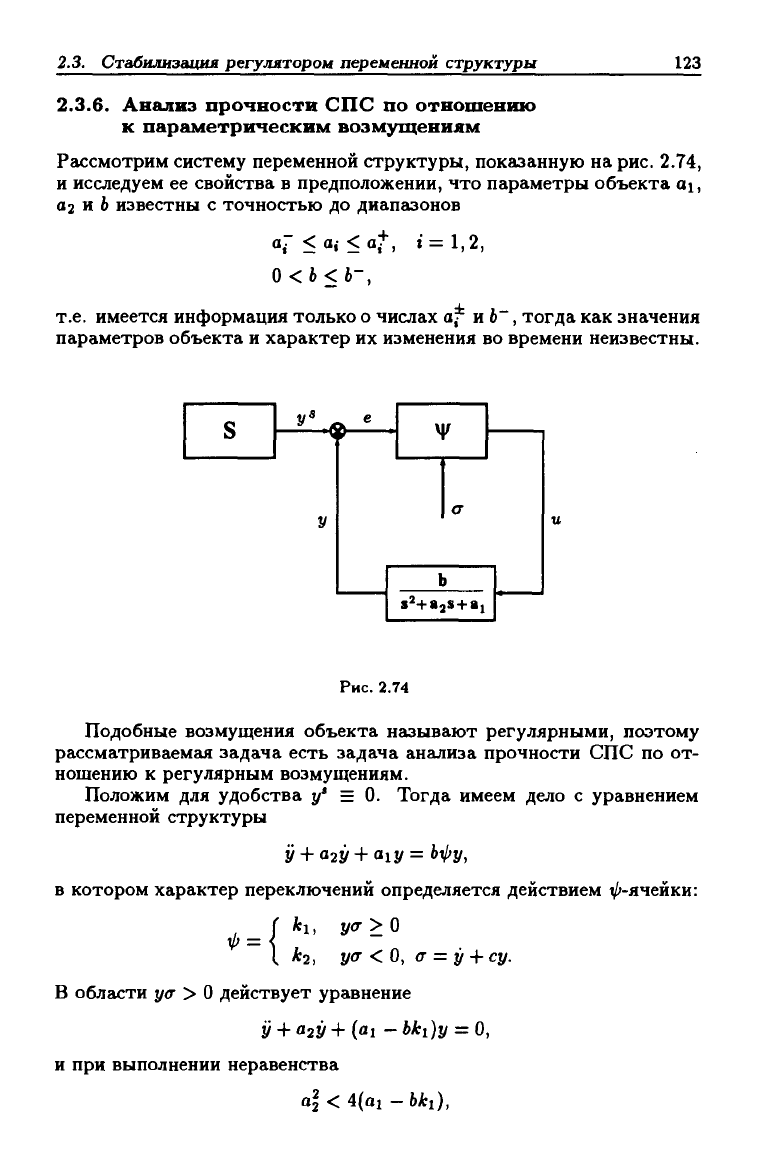
Иными словами, введение в обратную связь разрывного статиче-
ского элемента на два входа (^'-ячейки) (рис. 2.73) наделяет замкну-
S
у
i—• \l/ —
1
e
Рис. 2.73
<f\^
тую систему управления новыми качествами:
• г1симптотической устойчивостью при пониженных, по сравнению
с линейной обратной связью, требованиях к объему информации;
• понижением порядка уравнения движения для всех траекторий,
кроме асимптот
(рис.2.71
в);
• нечувствительностью к вариациям параметров объекта и к дей-
ствию внешней силы;
• прочностью по отношению к сингулярным возмущениям.
И хотя сделанные выше выводы почти очевидны, приведем все-
таки необходимые обоснования.
2.3.
Стабилизация
регулятором переменной
структуры
123
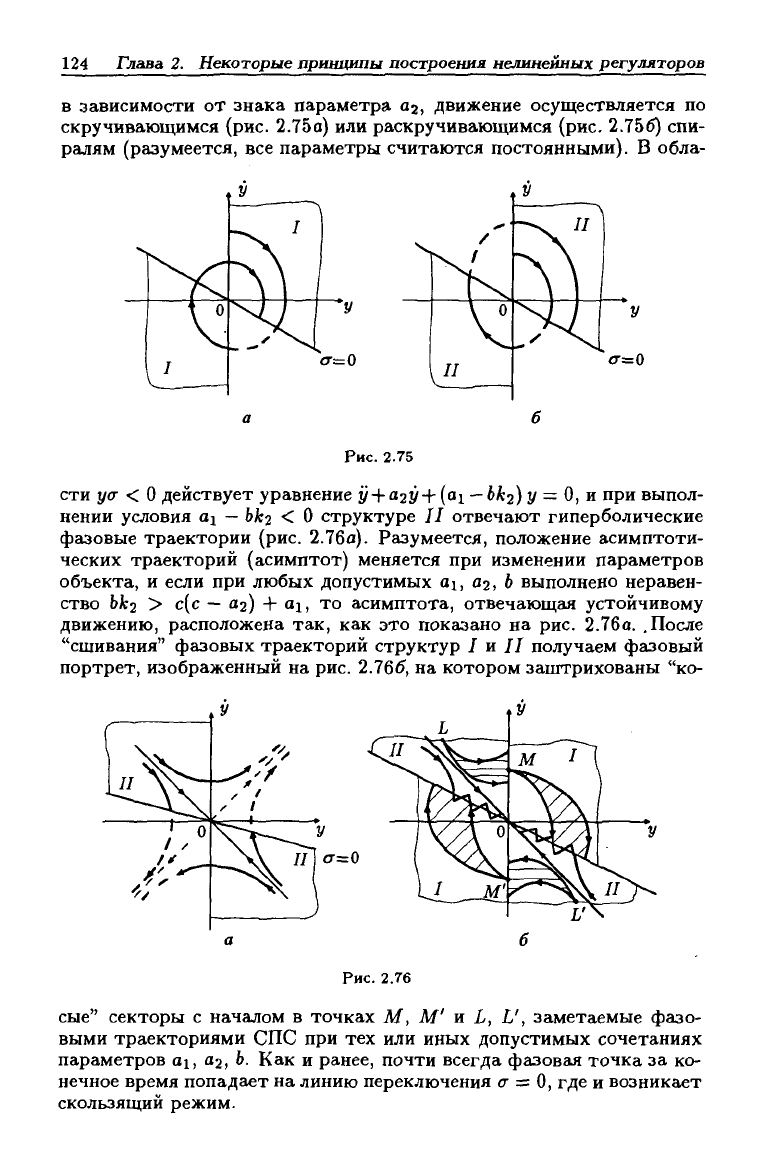
2.3.6. Анализ прочности СПС по отношению
к параметрическим возмущениям
Рассмотрим систему переменной структуры, показанную на рис. 2.74,
и исследуем ее свойства в предположении, что параметры объекта oi,
02 и 6 известны с точностью до диапазонов
о," < «• < «J*"' ^= 1.2.
0<6<Ь-,
т.е.
имеется информация только о числах а* и 6~, тогда как значения
параметров объекта и характер их изменения во времени неизвестны.
S
1Й
у
ь
*
9 * т
а
b
i^+ajS+a,
Рис.
2.74
Подобные возмущения объекта называют регулярными, поэтому
рассматриваемая задача есть задача анализа прочности СПС по от-
ношению к регулярным возмущениям.
Положим для удобства у* = 0. Тогда имеем дело с уравнением
переменной структуры
У +
а2У
+ а1у = bipy,
в котором характер переключений определяется действием ^-ячейки:
Г fci, у<т>0
1*2, усг <0,
<г
= у
+ су.
в области j/<T >
О
действует уравнение
У +
а2У
+ (oi -
f>ki)y
= О,
и при выполнении неравенства
о|<4(о1
-bki),
124 Глава 2. Некоторые принищпы построения нелинейных регуляторов
в зависимости от знака параметра аа, движение осуществляется по
скручивающимся (рис. 2.75а) или раскручивающимся (рис. 2.756) спи-
ралям (разумеется, все параметры считаются постоянными). В обла-
<т=0
Рис.
2.75
сти уо- < о действует уравнение y + a2y+{ai —6^2) J/ = О, и при выпол-
нении условия aj
— Ьк2
< О структуре II отвечают гиперболические
фазовые траектории (рис. 2.7ба). Разумеется, положение асимптоти-
ческих траекторий (асимптот) меняется при изменении параметров
объекта, и если при любых допустимых oi, 02, Ь выполнено неравен-
ство 6^2 > с(с
—
ог) + oi, то асимптота, отвечающая устойчивому
движению, расположена так, как это показано на рис. 2.76а. .После
"сшивания" фазовых траекторий структур I и II получаем фазовый
портрет, изображенный на рис. 2.766, на котором заштрихованы "ко-
о-=0
Рис.
2.Г6
сые"
секторы с началом в точках М, М' и L, L', заметаемые фазо-
выми траекториями СПС при тех или иных допустимых сочетаниях
параметров ах, oj, 6. Как и ранее, почти всегда фазовая точка за ко-
нечное время попадает на линию переключения (7 = 0, где и возникает
скользящий режим.
2.3.
Стабилизация регулятором переменной структуры
125
В скользящем режиме движение подчинено уравнению
т.е.
и в этом случае понижается порядок уравнения движения и до-
стигается независимость движения от параметров объекта, при этом
допускается произвольное изменение параметров.
Все сказанное выше справедливо, если имеют место условия
• "попадание" на прямую разрыва
(Г
= О,
• скользящий режим существует на всей прямой а = 0.
Необходимым и достаточным условием попадания является отсут-
ствие вещественных положительных нулей у полинома
ip{s) =
s"^
+ 02 s + (af - 6"iti).
Достаточное условие существования скользящего режима имеет вид
d(T
lim -т-<0,
7->+о at -
da-
lim -r>0
7->-o dt ~
(2.56)
И, так как равенство
&
={c-
а2)(т
-
[c(c
- аг)
4-
ai]y + Ьфу,
выполняется при
ki < min
<ч,ь
с{с - аг) - 01
^2 > шах
<ч,ь
с{с - аг) - ai
Заметим, что в условиях стабилизируемости методами СПС от-
сутствуют ограничения на скорость изменения параметров объекта,
тогда как для линейных систем такие ограничения имеются, как, на-
пример, в методе замороженных коэффициентов.
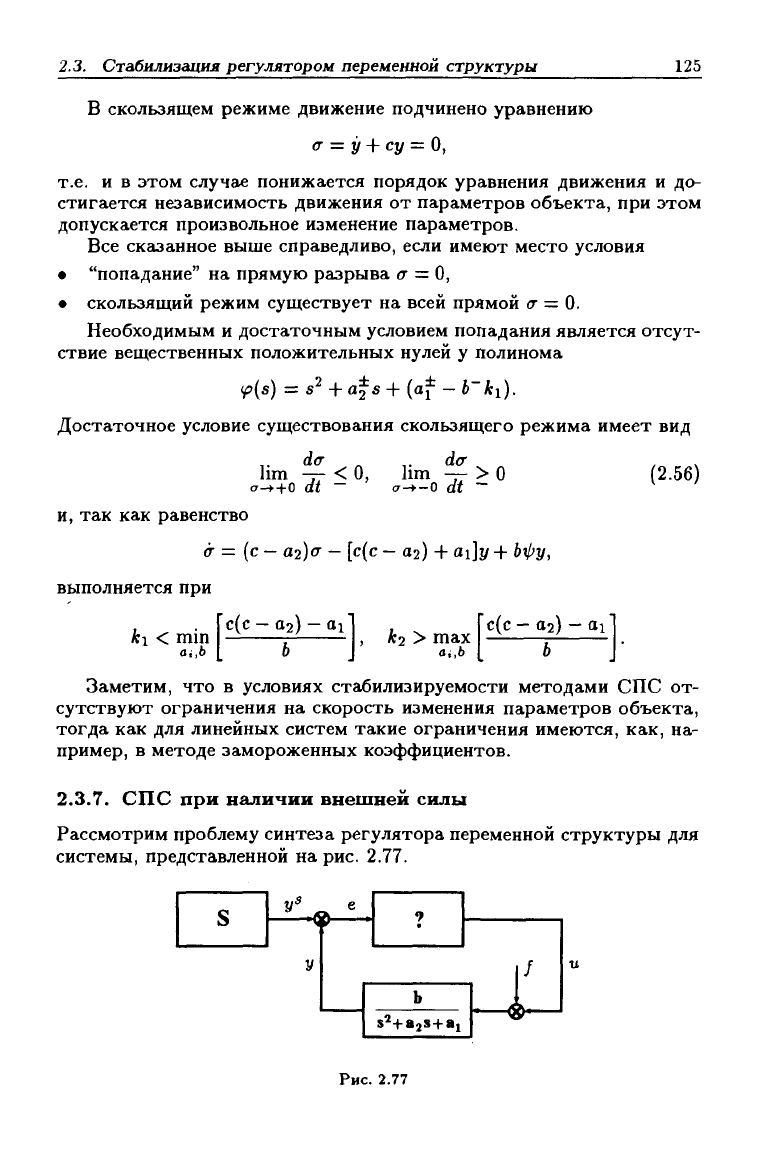
2.3.7. СПС при наличии внехпней силы
Рассмотрим проблему синтеза регулятора переменной структуры для
системы, представленной на рис. 2.77.
^
s'+a^s+a,
Рис.
2.77
126 Глава 2.
Некоторые
принципы
построения
нелинейных регуляторов
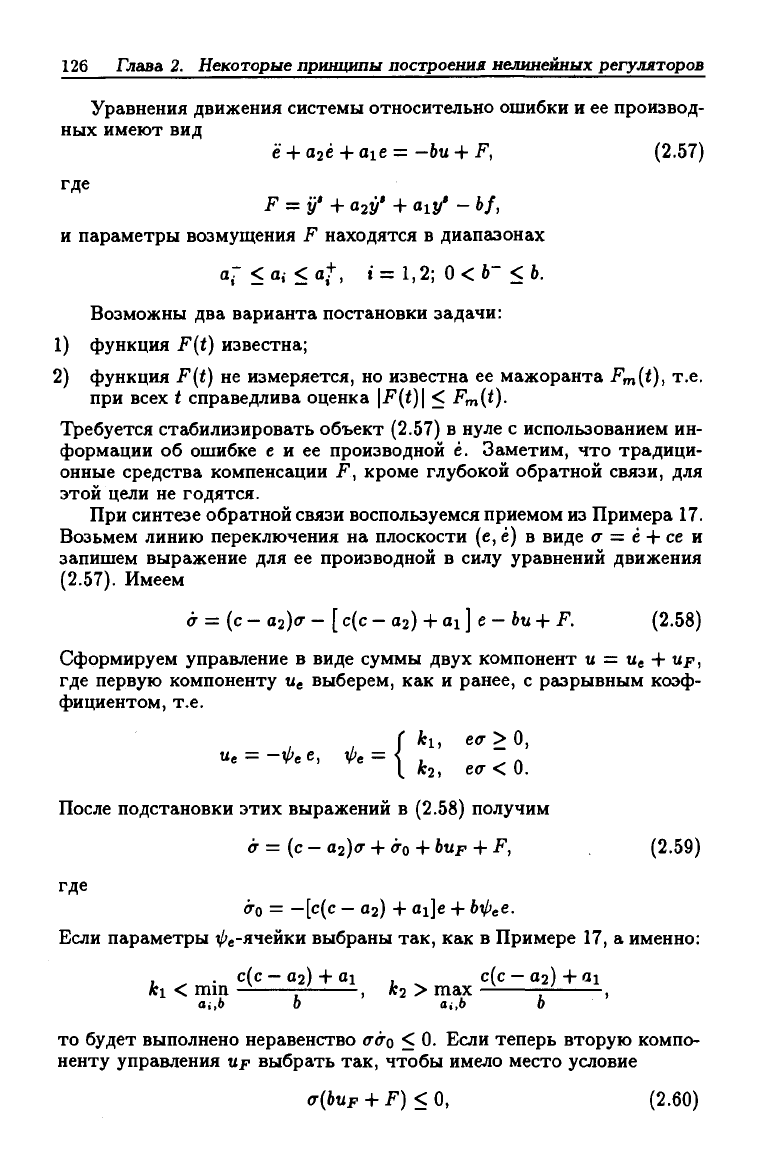
Уравнения движения системы относительно ошибки и ее производ-
ных имеют вид
e + a2e + aie =-bu + F, (2.57)
где
F = y' + а2у' + aiy' - bf,
и параметры возмущения F находятся в диапазонах
аГ < а, < af, t = 1,2;
О
< 6" < 6.
Возможны два варианта постановки задачи:
1) функция F{t) известна;
2) функция F{t) не измеряется, но известна ее мажоранта Fm(t), т.е.
при всех t справедлива оценка
\F{t)\
< Fm(t).
Требуется стабилизировать объект (2.57) в нуле с использованием ин-
формации об ошибке е и ее производной ё. Заметим, что традици-
онные средства компенсации F, кроме глубокой обратной связи, для
этой цели не годятся.
При синтезе обратной связи воспользуемся приемом из Примера 17.
Возьмем линию переключения на плоскости (е, ё) в виде
(т
= е + се и
запишем выражение для ее производной в силу уравнений движения
(2.57).
Имеем
&={с-
а2)<г
- [ с(с - аг) +
01
] е - Ь« + F. (2.58)
Сформируем управление в виде суммы двух компонент и =
Ue
+ up,
где первую компоненту Ue выберем, как и ранее, с разрывным коэф-
фициентом, т.е.
{
ki,
е<т
>
«2.
е<т <
После подстановки этих выражений в (2.58) получим
& = {с-
02)0-
+
&0
+ buF + F, (2.59)
где
&Q
= -[с{с - аз)
-I-
ai]e -|-
ЬфеС.
Бели параметры ^е-ячейки выбраны так, как в Примере 17, а именно:
. c{c-a2) + ai с{с-02)+ ai
ki < mm -i J-'- , «2 > max r-^ ,
ai,b 0 ai,b 0
TO будет выполнено неравенство
(Т&о
< 0. Если теперь вторую компо-
ненту управления up выбрать так, чтобы имело место условие
<т{Ьир
+ F)<0, (2.60)
2.3.
Стабилизация
регулятором переменной
структуры
127
то,
как это видно из выражения
,2
а&= (с
— а2)(т
+
ff&o
+ a{buF + F),
(2.61)
на поверхности а = О выполняется условие (Т(т < О, и имеет место
скользящий режим. Более того, неравенство (2.60) гарантирует также
и попадание изображающей точки на поверхность а = 0. Действи-
тельно, если при F = О выполнены условия попадания точки на по-
верхность
(Г
= О, то третье слагаемое в (2.61) эти условия усиливает.
Таким образом, если у полиномов
9?='=(s) =s^ + afs + af - b~h
нет положительных вещественных нулей, то условия попадания обес-
печены неравенством (2.60).
Неравенству (2.60) удовлетворяет множество функций up. Укажем
некоторые из них, характерные для СПС. В первом варианте при из-
вестном возмущении F таковой является функция
Up = фр F, фр
<rF>0,
(TF<0,
где b~ li < —I, b~ l2 >l. Bo втором варианте при неизвестном возму-
щении F форма закона сохраняется, но вместо функции F использу-
ется ее мажоранта Fm-
Up = ^pFm, фр
=
{'"
I h,
ff>0,
ff<0,
где 6- h < -1, b- h > 1.
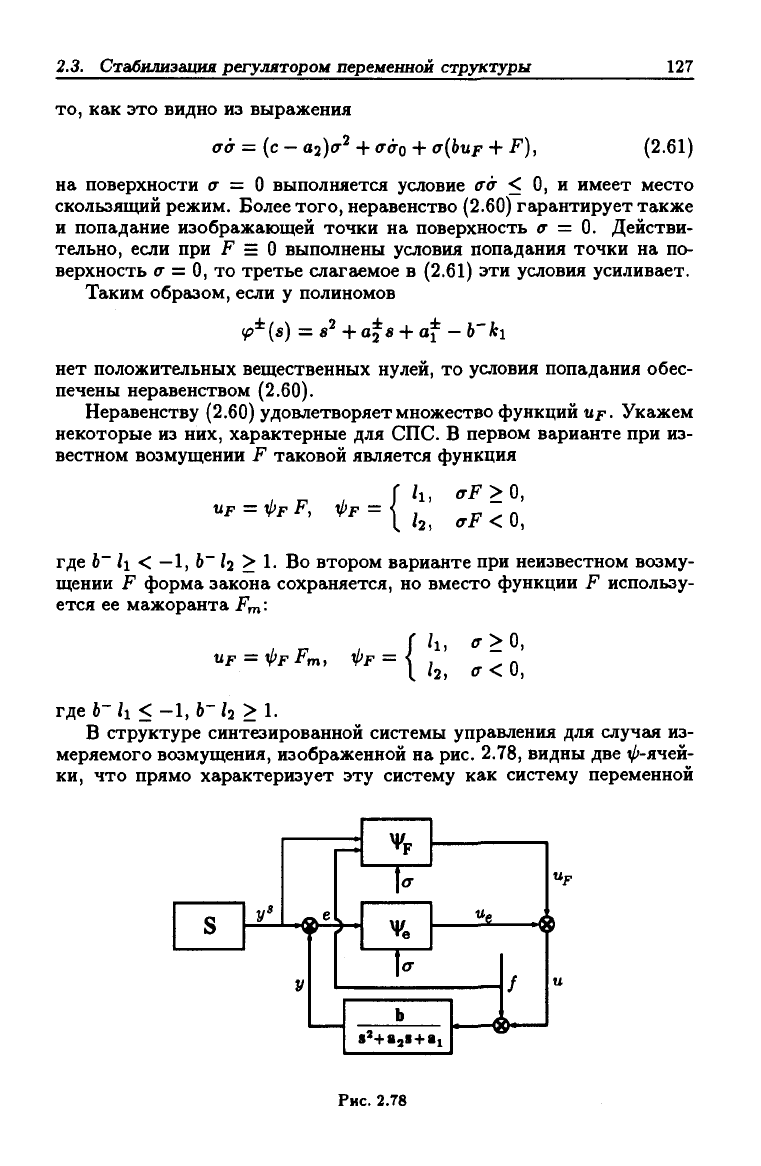
В структуре синтезированной системы управления д,пя случая из-
меряемого возмущения, изображенной на рис. 2.78, видны две V'-ячей-
ки,
что прямо характеризует эту систему как систему переменной
S
у'
-^^
У
\L
1
Ч-р
а
%
t-
"" ffi
t
b
|'+•,»+•!
*
f
к.
р*
Up
Рис.
2.78
128 Глава 2.
Некоторые
принципы
построения
нелинейных регуляторов
структуры. В СПС скачкообразно меняется не только коэффициент
обратной связи ^е, но и коэффициент прямой связи по возмущению.
Заметим, что ^-ячейка является функциональным элементом на
два входа, и ее можно представить в виде релейного элемента с изме-
няющейся "полкой" или, иначе, величиной коммутируемого сигнала.
Это хорошо видно при так назывг1емом квазирелейном представлении
^-ячейки.
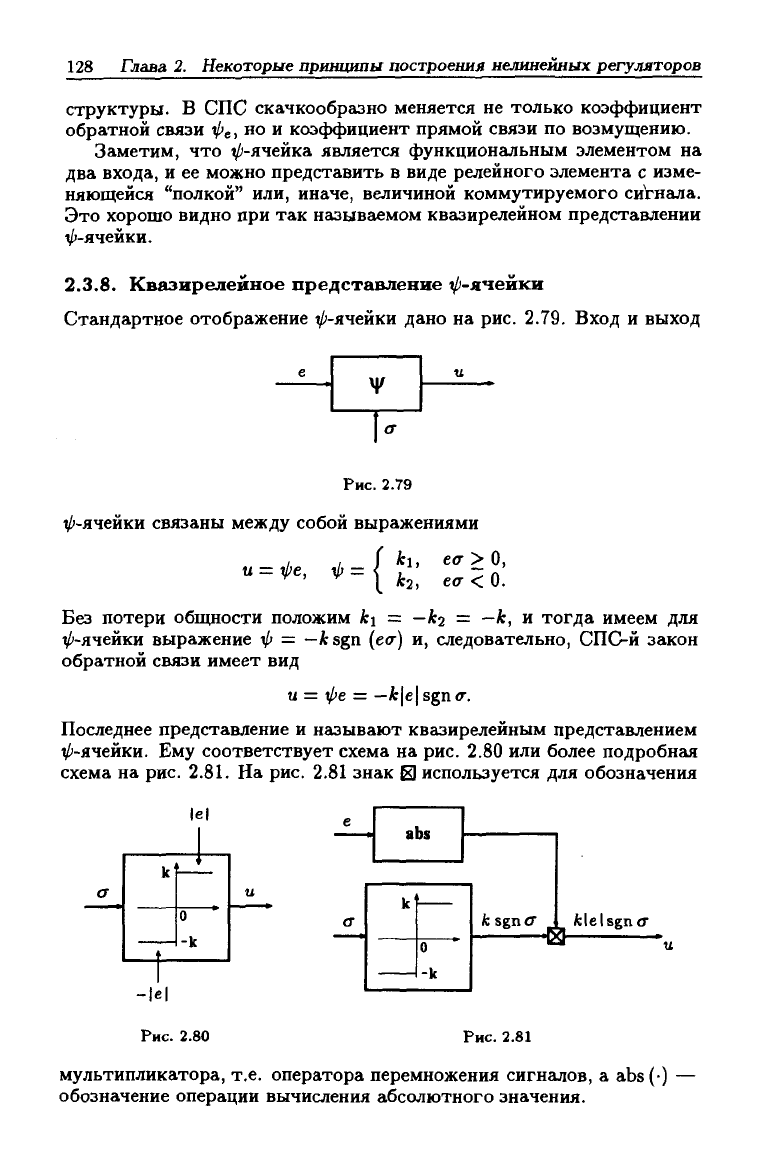
2.3.8. Квазирелейное представление ^'-ячейки
Стандартное отображение ^-ячейки дано на рис. 2.79. Вход и выход
V
Рис.
2.79
V'-ячейки связаны между собой выражениями
, , ( ki, еа > О,
^ ' ^ \ *2, ео- < 0.
Без потери общности положим hi = —Аз = —к, и тогда имеем для
V'-ячейки выражение V = —Arsgn
{е<т)
и, следовательно, СПС-й закон
обратной связи имеет вид
и = фе =
—к\е\
sgn
ст.
Последнее представление и называют квазирелейным представлением
V'-ячейки. Ему соответствует схема на рис. 2.80 или более подробная
схема на рис. 2.81. На рис. 2.81 знак Н используется для обозначения
|е|
к^^
к
-|е|
Рис.
2.80
abs
к^
О
-к
fcsgn<r
{SF
felelsgncr
Рис.
2.81
мультипликатора, т.е. оператора перемножения сигналов, а abs(-)
обозначение операции вычисления абсолютного значения.
2.3.
Стабилизация регулятором переменной структуры
129
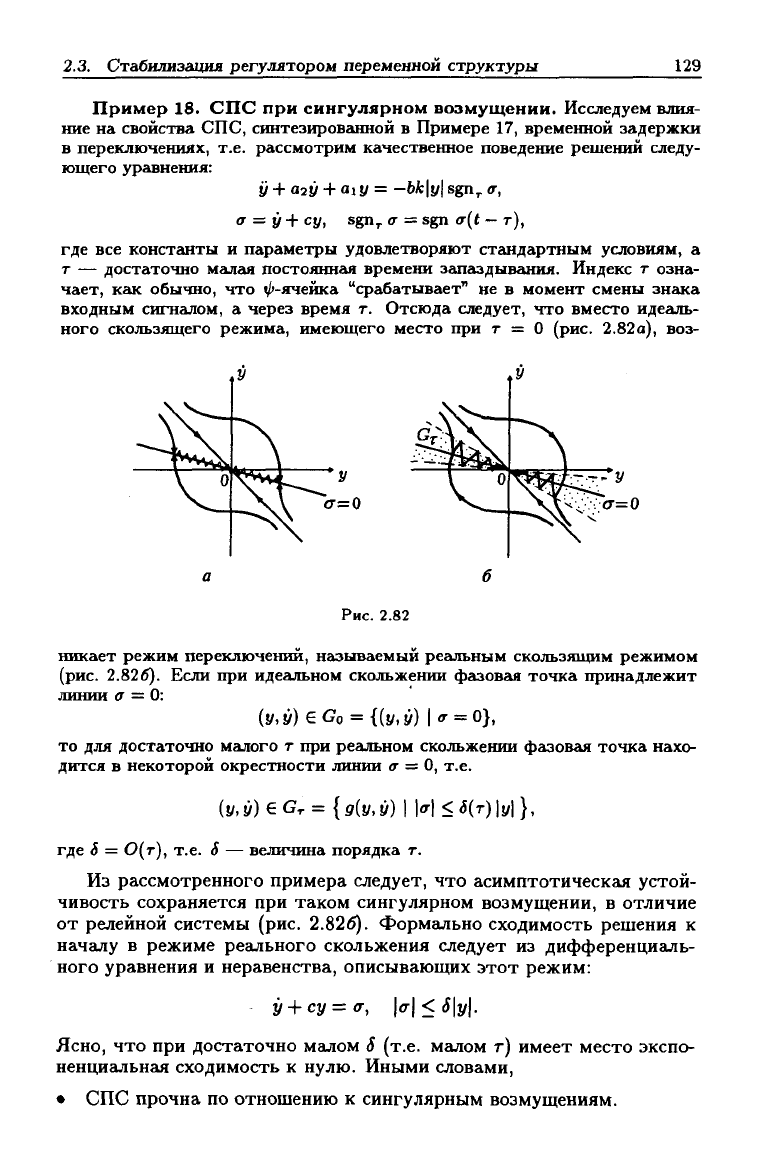
Пример 18. СПС при сингулярном возмущении. Исследуем влия-
ние на свойства СПС, синтезированной в Примере 17, временной задержки
в переключениях, т.е. рассмотрим качественное поведение решений следу-
ющего уравнения:
у + а2у + aiy = -bk\y\ sgn^ и,
IT
= у
+
су, sgn^
<т
= sgn a(t - т),
где все константы и параметры удовлетворяют стандартным условиям, а
т — достаточно малгш постояннгш времени запаздывания. Индекс т озна-
чает, как обычно, что ^'-ячейка "срабатывает" не в момент смены знака
входным сигналом, а через время т. Отсюда следует, что вместо идеаль-
ного скользящего режима, имеющего место при т = О (рис. 2.82
а),
воз-
о-=0
Рис.
2.82
никает режим переключении, называемый реальным скользящим режимом
(рис.
2.826). Если при идеальном скольжении фазовая точка принадлежит
линии а = 0:
(у,
у)
е
Go
=
{(у,
у)
|<г
=
о},
то для достаточно малого г при регишном скольжении фазовая точка нахо-
дится в некоторой окрестности линии
(Т
=
О,
т.е.
{y,y)&Gr={g(y,y)\W\<5{r)\y\},
где
1$
= 0(т), т.е. S — величина порядка г.
Из рассмотренного примера следует, что асимптотическая устой-
чивость сохраняется при таком сингулярном возмущении, в отличие
от релейной системы (рис. 2.826). Формально сходимость решения к
началу в режиме реального скольжения следует из дифференциаль-
ного уравнения и неравенства, описывающих этот режим:
у + су =
<т,
](г\<6\у\.
Ясно,
что при достаточно мгиюм S (т.е. малом г) имеет место экспо-
ненциальная сходимость к нулю. Иными словами,
• СПС прочна по отношению к сингулярным возмущениям.
130 Глава 2.
Некоторые
принципы
построения
нелинейных регуляторов
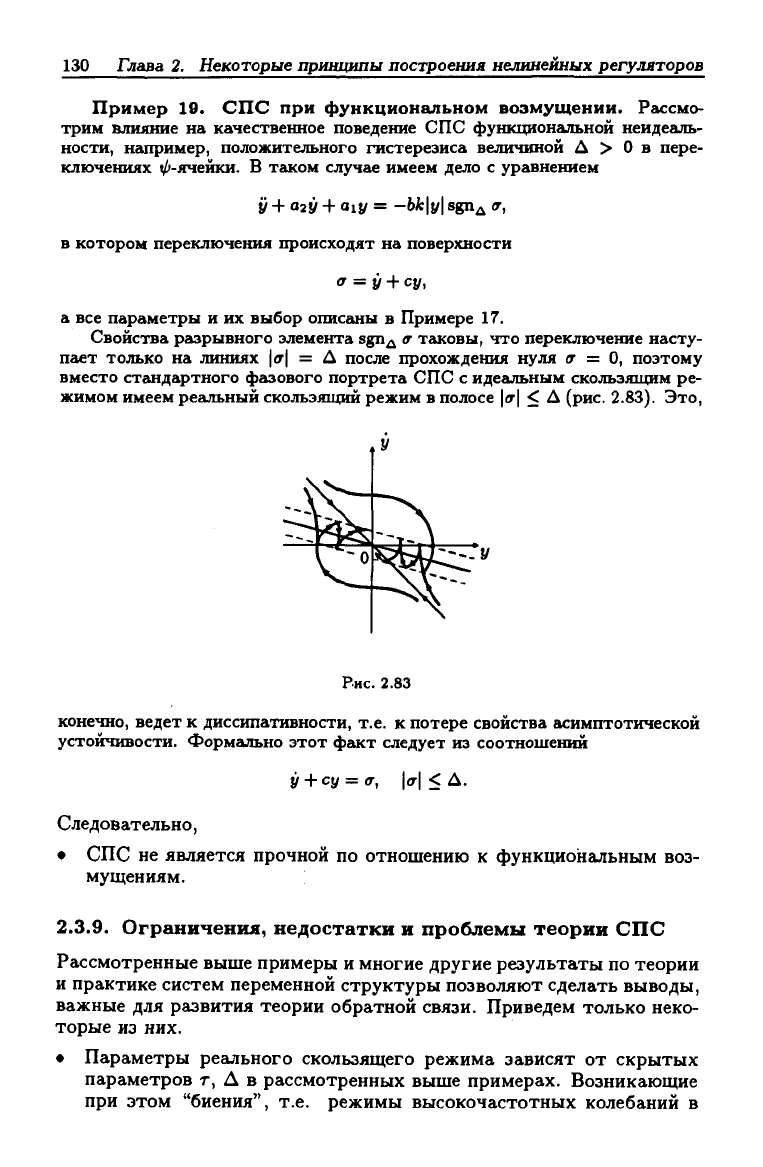
Пример 19. СПС при функциональном возмущении. Рассмо-
трим влияние на качественное поведение СПС функциональной неидеаль-
ности, например, положительного гистерезиса величиной Л > О в пере-
ключениях ^-ячейки. В таком случае имеем дело с уравнением
У
-I-
02У
-f- oiy = -bk\y\ sgпд
<т,
в котором переключения происходят на поверхности
<г
= у + су,
а все параметры и их выбор описаны в Примере 17.
Свойства рг1зрывного элемента sgnд
tr
тгисовы, что переключение насту-
пает только на линиях
\IT\
= Л после прохождения нуля о- = О, поэтому
вместо стандартного фазового портрета СПС с идегльным скользя1цим ре-
жимом имеем реальный скользящий режим в полосе
\<т\
< Д (рис. 2.83). Это,
Рис.
2.83
конечно, ведет к диссипативности, т.е. к потере свойства асимптотической
устойчивости. Формально этот фгист следует из соотношений
у
+ су =
(г,
\а\ < Д.
Следовательно,
• СПС не является прочной по отношению к функциональным воз-
мущениям.
2.3.9. Ограничения, недостатки и проблемы теории СПС
Рассмотренные выше примеры и многие другие результаты по теории
и практике систем переменной структуры позволяют сделать выводы,
важные для развития теории обратной связи. Приведем только неко-
торые из них.
• Параметры реального скользящего режима зависят от скрытых
параметров г, Д в рассмотренных выше примерах. Возникающие
при этом "биения", т.е. режимы высокочастотных колебаний в