Du C., Xie L. Modeling and Control of Vibration in Mechanical Systems
Подождите немного. Документ загружается.

15
Adaptive Filtering Algorithms for Active
Vibration Control
15.1 Introduction
Many advanced control techniques have been studied for active noise and vibration
control, in cl uding o ptimal and robust control and adapt ive control strat egies. The ad-
vance o f computer technologies has made digital signal pro cessing techniques much
more useful in modern cont rol systems. Adaptive filters have been widely used in
the implementation of adaptive algorithms for active vibration control (AVC). Sam-
pling time constraint is the major drawback of a digital control syst em that requires
very high processing speed for real time control. Adaptive filtering offers sign ificant
advantages over passive silencers at low frequencies where lower sampling rates are
adequate.
There are two main approaches to adaptive filtering in AVC, feedforward and feed-
back adaptive filtering. The feedforward algo rithm requires the source information
in order to attenuate the vibration. In many applications, the so urce of vibrati on is
impractical or expensive to measure, and a feedforward algorithm becomes impos-
sible or difficult to implement in those application s. A feedback algorithm has an
advantage of utilizing only the vibration signal to be controlled.
15.2 Adaptive feedforward a lgorithm
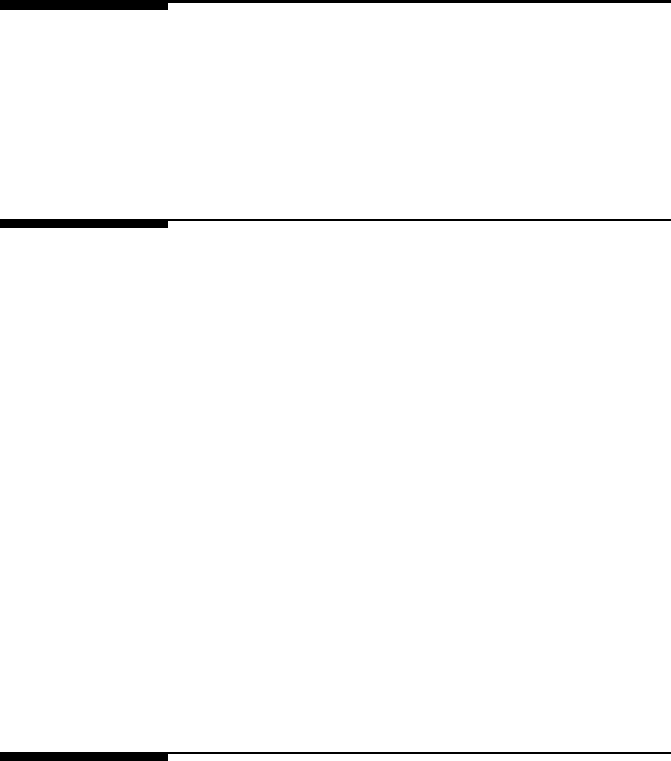
Figur e 15.1 shows the so-called filtered-X LMS (FXLMS) algorit hm whi ch was first
introduced by Bernard Widrow in 1981 [37].
The filtered-X LMS algorithm is derived as follows wit h the notation defined in
Chapter 3. The error signal e(k) is given by
e(k) = d(k) + y(k) = d(k) + P (z)u(k )
= d(k) + P (z)(W
T
(z)x(k)). (15.1)
275

276 Modeling and Control of Vibratio n in Mechanical Systems
FIGURE 15.1
Block diagram of FXLMS algorithm.
Considering that
∇e(k) =
∂e(k)
∂W (k)
= p(k) ∗ x(k), (15. 2)
the gradi ent estimate of t he mean-squared error will be
∇
ˆ
ξ(k) = ∇e
2
(k) = 2[ ∇e(k )]e(k)
= 2[p(k) ∗ x(k)]e(k), (15.3)
where p(k) is the impul se response of P (z). In a practical situation, an exact model
P (z) is not available, and therefore its estimated model
ˆ
P (z) is used to r epresent
P (z) in the algorithm. Either an FIR or IIR filter can be used to model t he AVC
system. Then the reference signal for the LMS algorithm will be
ˆx(k) =
ˆ
P (z)x(k). (15.4 )
ˆx(k) is called the filtered reference signal because the reference input signal is passed
through the estimated mod el of t he AVC system. Equ ation (15.3) becomes
∇
ˆ
ξ(k) = 2[ ˆp(k) ∗ x(k)]e(k) = 2ˆx(k)e(k). (15.5 )
The coefficients o f the weight vector will be updated by the following equation.
Adaptive Filtering Algorithms for Active Vibration Cont rol 27 7
W (k + 1) = W (k) −
µ
2
∇
ˆ
ξ(k)
= W (k) − µˆx(k)e(k). (15.6)
The resulting adaptive alg orithm is known as the Filtered-X LMS algorithm.
In the normalized case, the algorithm is known as the Filtered-X NLMS (FXNLMS)
algorithm whereby the weight vector will be updated by
W (k + 1) = W (k) − µ(k)ˆx(k)e(k), (15.7)
µ(k) =
α
ε + ˆx
T
(k)ˆx(k)
. (15.8)
So far, the feedforward adaptive algorith m has been discussed. The feedforward
algorithm requires the reference signal that cannot be available in many applications.
To overcome this prob lem an adaptive feedback algor ithm is considered below.
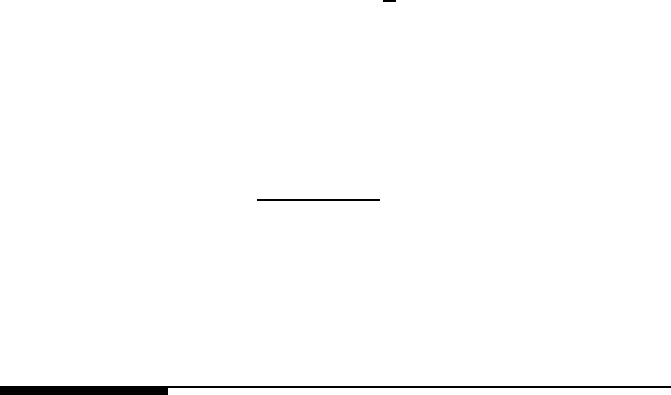
15.3 Adaptive feedback algori thm
There is another algorithm that combines the traditional feedback control and adap-
tive filtering approach, and is therefore referred to as the Adaptive Feedback Algo-
rithm. The algorithm utilizes only the feedback error signal to cancel the disturbance
vibration. Since there is no direct reference informati on available fo r the v ibration
control, th e distu rbance signal is regenerated (extracted) from the error signal and the
approximated i nput reference signal is then fed back to the adaptive filter, as shown
in Figure 15.2.
An estimate of the reference signal x(k) is obtained by subtracting the estimated
cancellation signal ˆy(k) of y(k) fr om the error signal e(k ).
ˆx(k) =
ˆ
d(k) = e(k) − ˆy(k). (15.9)
The weight updating algo rithm is the same as the feedforward control scheme,
FXLMS or FXNLMS. The feedback loop W (z)
ˆ
P (z) will intr oduce poles to the
system. The characteristic equation of the system will be:
α(z) = 1 + W (z)
ˆ
P (z). (15.10)
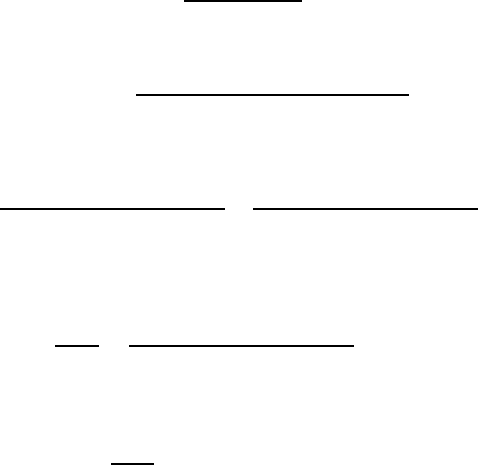
Adaptive feedback control can be seen as adaptive inverse control where an adap-
tive filter is used to track the inverse model of P (z). The analogy is illustrated in
Figur e 15.3.
In this control system, a compensator C(z) will adapt to track the inverse model
P
−1
(z) [38]. The system is analy zed as follows.
X
′
(z) = R(z) − X(z) = R(z) − E(z) +
ˆ
P (z)C(z)X
′
(z), (15.11)
278 Modeling and Control of Vibratio n in Mechanical Systems
i.e.,
X
′
(z) =
R(z) − E(z)
1 −
ˆ
P (z)C(z)
. (15.12)
E(z) = D(z) +
P (z)C(z)R(z) − P (z)C(z)E(z)
1 −
ˆ
P (z)C(z)
, (15.13)
from which,
E(z) =
D(z)(1 −
ˆ
P (z)C(z))
1 −
ˆ
P (z)C(z) + P (z)C(z)
+
R(z)
1 −
ˆ
P (z)C(z) + P (z)C(z)
.(15.14)
With the reference signal R(z) set to zero, the transfer function from D(z) to E(z)
will be:
E(z)
D(z)
=
1 −
ˆ
P (z)C(z)
1 −
ˆ
P (z)C(z) + P (z)C(z)
. (15.15)
If the estimated model
ˆ
P (z) is exactly the same as P (z) , (15.15) will be reduced to:
E(z)
D(z)
= 1 −P (z)C(z). (15.16)
An adaptive filter will be applied in the place of C(z) and the filter will adapt
its weig ht vecto r to approach the inverse model of P (z), P
−1
(z) [38]. When C(z)
becomes the inverse model of P (z), the effect of D(z) over E(z) will be totally
eliminated.
Therefore correct mod eling of P (z) is crucial to the adaptive feedback control
system. In a practical situation, it is difficult to obtain the exact mod el of the system.
Modeli ng error may lead the syst em to an unstable situation.
Adaptive Filtering Algorithms for Active Vibration Cont rol 27 9
FIGURE 15.2
Filtered-X LMS adaptive feedback algorithm.
FIGURE 15.3
Adaptive inverse contro l scheme.
280 Modeling and Control of Vibratio n in Mechanical Systems
15.4 Co mparison between feedforward and feedback controls
In spite of the advantage of not requiring the information over feedforward contr ol,
adaptive feedback control can only be applicable for narrow band disturbance r ejec-
tion. The traditional feedback controller cannot react to the disturbance before the
control error has alr eady occurred. But the adaptive filter has the ability to capture
the statistics of the disturbance signal. For p eriodic disturbance signals, it is possible
for the adaptive feedback control to track the frequency of the signal and pro gres-
sively attenuate the disturbance signal. Therefore adaptive feedback control is still
efficient for pure sinusoid signals.
On the other hand, feedforward control has an ability to reject the wide band dis-
turbances, because the controller receives the disturb ance sig nal before it reaches the
point to be controlled and takes a control action in advance to eliminate the di stur-
bance impact.
An approximated model of the system appears in the feedback loop of the adaptive
feedback system, which in troduces poles to th e system. Therefore robustness of sta-
bility of the adaptive feedback system can be improved by minimizing the modeling
error of the system.
15.5 Application in Stewart platform
We have chosen the adaptive feedback alg orithm for hexapod smart structure intro-
duced in Chapter 3. Sin ce th e structure has six actuators, a multiple-channel adaptive
feedback control system i s studied.
15.5.1 Multi-channel adaptive feedback AVC system
In a multiple-channel AVC system, let the number of the secondary sources be K
and the number of error sensors be M . The reference signal synthesizer uses K
secondary signals, M error signals, and K ×M secondary path esti mates to generate
M reference signals for K × M adaptive filters. The synthesized reference signals
are expressed as:
x
m
(k) = e
m
(k) +
K
X
n=1
ˆp
mn
(k) ∗ u
n
(k), m = 1, 2, ···, M, (15.17)
Adaptive Filtering Algorithms for Active Vibration Cont rol 28 1
where ˆp
mn
(k) is the impulse response of the secondary-path estimate
ˆ
P
mn
(z) and
u
n
(k) is the nt h secondary signal expressed as
u
n
(k) =
M
X
m=1
w
nm
(k) ∗ x
n
(k), n = 1, 2, ···, K, (15.18)
where w
nm
(k) is the i mpulse response of the adaptive filter W
nm
(z) .
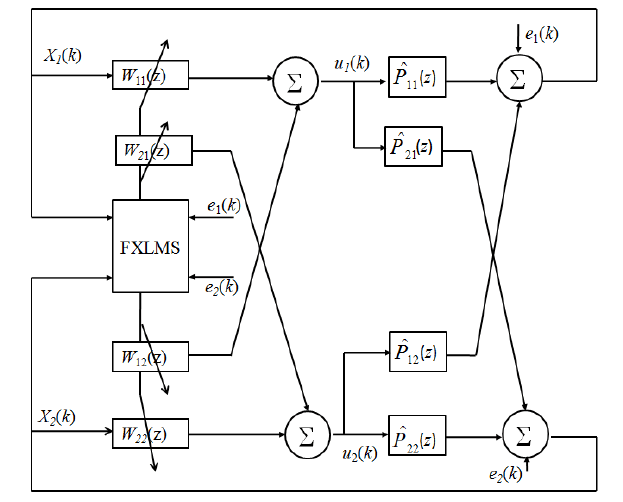
A 2 × 2 adapt ive feedback AVC system shown in Figure 15.4 is presented as an
example for multiple channel AVC systems. Two secondary signals, u
1
(k) and u
2
(k)
are generated as
u
1
(k) = w
11
(k) ∗ x
1
(k) + w
12
(k) ∗ x
2
(k), (15.19)
u
2
(k) = w
21
(k) ∗ x
1
(k) + w
22
(k) ∗ x
2
(k). (15.20)
The reference signals are synt hesized as:
x
1
(k) = e
1
(k) + ˆp
11
(k) ∗ u
1
(k) + ˆp
12
(k) ∗ u
2
(k), (1 5.21)
x
2
(k) = e
2
(k) + ˆp
21
(k) ∗ u
1
(k) + ˆp
22
(k) ∗ u
2
(k). (1 5.22)
The coefficients of the four adaptive filters are adjusted usi ng the FXLMS algo-
rithm expressed as:
W
11
(k + 1) = W
11
(k) + µ{[ˆp
11
(k) ∗ X
1
(k)]e
1
(k) + [ ˆp
21
(k) ∗ X
1
(k)]e
2
(k)},
W
21
(k + 1) = W
21
(k) + µ{[ˆp
12
(k) ∗ X
1
(k)]e
1
(k) + [ ˆp
22
(k) ∗ X
1
(k)]e
2
(k)},
W
12
(k + 1) = W
12
(k) + µ{[ˆp
11
(k) ∗ X
2
(k)]e
1
(k) + [ ˆp
21
(k) ∗ X
2
(k)]e
2
(k)},
W
22
(k + 1) = W
22
(k) + µ{[ˆp
12
(k) ∗ X
2
(k)]e
1
(k) + [ ˆp
22
(k) ∗ X
2
(k)]e
2
(k)}.
15.5.2 Multi-channel adaptive feedback algorithm for hexapod plat-
form
The hexapod smart structure has six secondary sources. If we use six error sensors,
there will be 72 adaptive filters including 36 filters for reference signal synthesizer
and 36 filters for Filtered-X purpose. There will be a very high computational burden
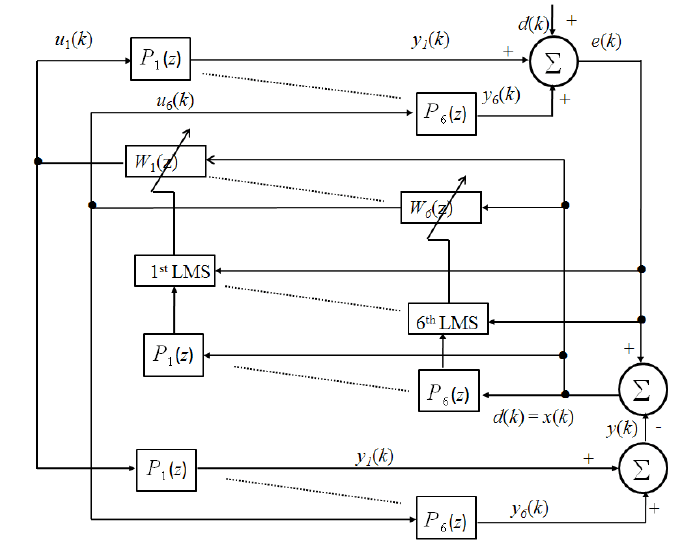
in real t ime implementation. Therefore a (6 × 1) adaptive control scheme, as shown
in Fi gure 15.5, has been chosen for the smart structure with only one sensor placed
at the center of the upper plate surface.
In this system, there are six secondary path actuators and one error sensor. The
error signal will be:
e(k) = d(k) +
6
X
n=1
p
n
(k) ∗ u
n
(k), (15.23)
where p
n
(k), n = 1, 2, ···, 6 i s the impulse response of the secondary path P
n
(z),
and u
n
(k), n = 1, 2, ···, 6 is the secondary signal of the adaptive filter W
n
(z).
282 Modeling and Control of Vibratio n in Mechanical Systems
FIGURE 15.4
Block diagram of 2 × 2 adaptive feedback algorithm.
Adaptive Filtering Algorithms for Active Vibration Cont rol 28 3
The reference signal x(k) is sy nthesized as an estimate of the primary disturbance.
x(k) =
ˆ
d(k) = e(k) −
6
X
n=1
ˆp
n
(k) ∗ u
n
(k), (15 .24)
where ˆp
n
(k) is the impulse response of
ˆ
P
n
(z).
The FXLMS algorithm is used to minimize the error signal e(k) by adjusting the
weight vector f or each adaptive filter W
n
(z) according to:
W
n
(k + 1) = W
n
(k) + µX
′
n
(k)e(k), n = 1, 2, ···, 6, (15.25 )
where X
′
n
(k) = ˆp
n
(k)∗X(k) is the reference signal vector filtered by the secondary
path estimate,
ˆ
P
n
(z).
FIGURE 15.5
Block diagram of 6 × 1 FXLMS adaptive feedback control system.