Du C., Xie L. Modeling and Control of Vibration in Mechanical Systems
Подождите немного. Документ загружается.

11
H
∞
-Based Design for Disturbance Observer
11.1 Introduction
The idea of observing disturbance to improve the performance of a servomechanism
was first intr oduced in [123]. It was suggested t hat if the disturbances were supp os-
edly generated by a linear dynamic system and the model of the syst em was known,
they could be estimated from the system output measurement by an asymptotic esti-
mator (Luenberger observer) and the effect of the dist urbances could be neutralized
by feeding the disturbance estimates back into the system [124]. Over the years, the
method has been modified and applied. However, it is not always easy to ident ify the
disturbance model. Furt her, it is not always true that the disturbance model is linear
time-invariant. Subsequently, a new type of disturbance observer (DOB) has been
introduced [128]. This new method does not require control designers to have the
full in formation of the distur bance model and does not need the assumption that the
disturbance model is linear time-invariant. However, it requires the model of th e con-
trolled plant to be accurately known and invertible, at least within the bandwidth of
interest [1 29]. Recently, it has been proven that under certain assumptions imposed
on the plant and disturbance models, the two different methods are equivalent in that
the original d isturbance observer introduced in [ 123] is actually a generalizatio n of
the latter metho d [126]. In this chapter, we study the latter method where a g eneral
form of distu rbance observers, which does not need to so lve the plant model inverse,
will be introduced.
If majority of the disturbances are of r el atively lower frequency, when a DOB
is added on to attenuate the effect of disturbances, the standard and conventional
way of designing a Q-filter is to design it to be a low-pass filter with unity DC gain
[128]. In this chapter, we introduce the conventional disturbance observer first, and
then present a general form of dist urbance observer. An H
∞
control based method is
applied to the design of a Q-filter. The designed disturbance observer is applied to an
HDD servo system and its effectiveness in distur bance attenuation is demonstrated
by simulation s and experiments.
215
216 Modeling and Control of Vibratio n in Mechanical Systems
11.2 Co nventional disturban ce observer
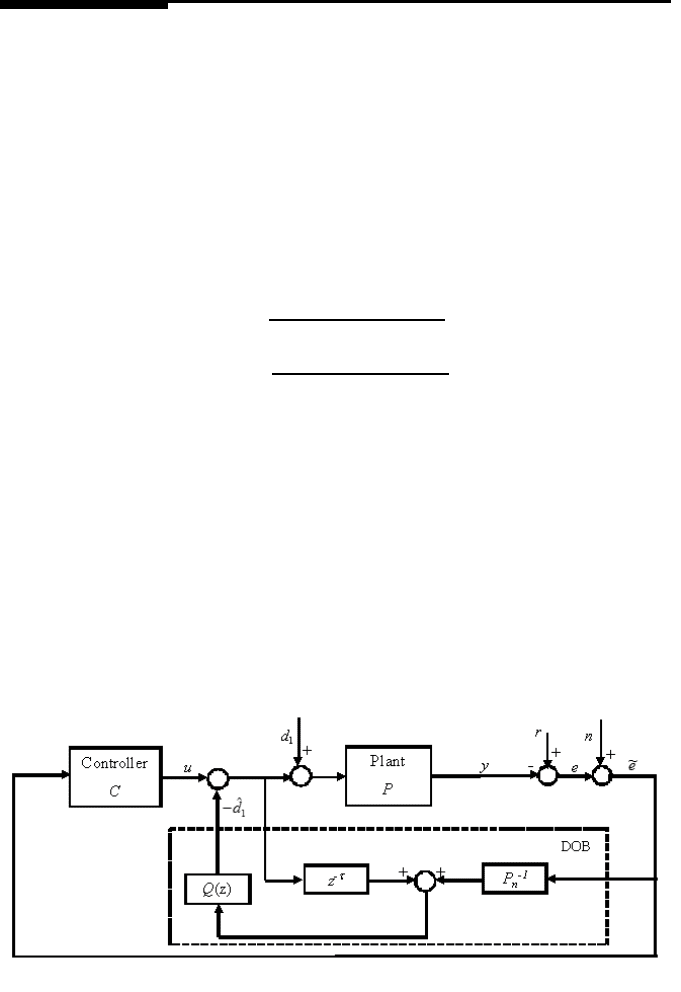
Figur e 11.1 shows the block diagram of the conventional disturbance observer (DOB)
structure, where C is the f eedback controller, P
n
is the nominal model of the plant
P , d
1
is the input disturbance, n is the noise,
ˆ
d
1
is an estimate of d
1
, and P
−1
n
is the
inverse o f P
n
. τ represents a delay in t he plant P . Theoretically, P (z) = z
−τ
P
n
(z).
Ignoring the n ominal feedback loop with C, the transfer functions from the distur-
bance d
1
and noise n t o th e output y are given by
T
yd
1
=
P P
n
(1 − Qz
−τ
)
P
n
+ Q (P − P
n
z
−τ
)
, (11 .1)
T
yn
=
−P Q
P
n
+ Q (P − P
n
z
−τ
)
. (11.2 )
To reject the disturbance d
1
, Q can be set as unity because T
yd
1
≈ 0 when the
delay is negligible. However, when Q = 1, T
yn
≈ −1 which means the measure-
ment noise n is not att enu at ed. Thus, to eliminate the noise effect, it is k nown from
(11.2) that an ideal solution of Q is zero, but this will mean T
yd
1
≈ P and hence the
disturbance wi ll be amplified.
FIGURE 11.1
Block diagram of the cont rol loop with a conventional disturbance observer.
H
∞
-Based Desig n for Disturbance Observer 217
Considering the overall system in Figure 11.1, t he sensitivity function is given by
S(z) =
1 − Qz
−τ
1 − Qz
−τ
+ P C + P QP
−1
n
. (11.3)
Theoretically, the plant model is P = P
n
z
−τ
, thus (11.3) becomes
S(z) =
1 − Qz
−τ
1 + P C
, (11.4)
which is stable as long as Q is stable si nce the loop is stable before the disturbance
observer is added on. Mo reover, it is dedu ced from (11.3) that when Qz
−τ
= 1 with
zero phase around th e distu rbance f requency, the disturbance can be rejected because
S(z) → 0. Hence Q is designed su ch that the ph ase of Qz
−τ
is almost zero degree
and the magnitude is close to one in the frequency range where the disturbance d
1
dominates. Note th at in Figure 11.1, it is needed to solve the inverse P
−1
n
of the
nominal plant mod el . In what follows, a general form of the di sturbance observer is
proposed and the plant model inverse is not needed.
11.3 A general form of disturb ance observer
Let
P
n
(z) = B(z)/A(z), (11.5 )
B(z) = b
m
z
m
+ b
m−1
z
m−1
+ ···+ b
0
,
A(z) = z
n
+ a
n−1
z
n−1
+ ···+ a
0
be the nominal model of the plant P . With the same notations as in Figure 11.1,
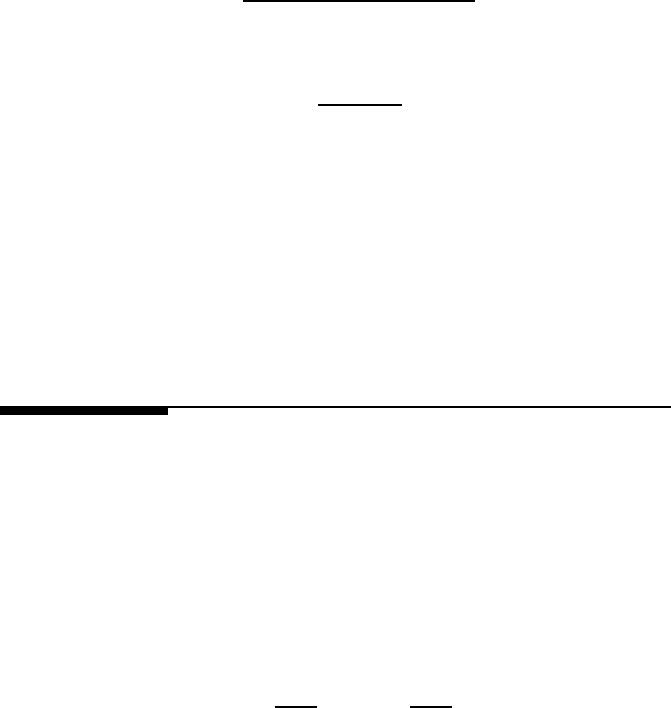
Figur e 11.2 displays a general form of disturbance observer, where
M(z) =
B(z)
z
d
m
, N (z) =
A(z)
z
d
n
, (11.6 )
and d
2
is the output disturbance.
In the conventional disturbance observer in Figure 11.1,
M(z) = z
−τ
, N(z) = P
−1
n
(z). (11.7)
Denote the state-space descriptions P (z) : (A
p
, B
p
, C
p
, D
p
); C(z) : (A
c
, B
c
,
C
c
, D
c
); M(z) : (A
M
, B
M
, C
M
, D
M
); N(z) : (A
N
, B
N
, C
N
, D
N
). From
Figur e 11.2,
x(k + 1) = Ax(k) + B
1
w(k) + B
2
u
q
(k), (11.8)
y
q
(k) = C
y
x(k) + D
yw
w(k) + D
yu
u
q
(k), (11.9)
y(k) = C
z
x(k), (11.1 0)
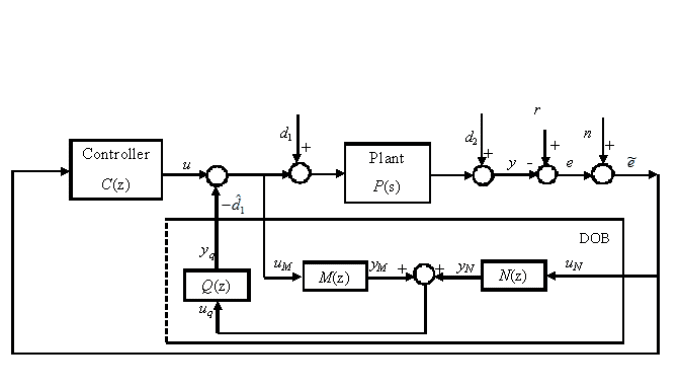
218 Modeling and Control of Vibratio n in Mechanical Systems
FIGURE 11.2
Block diagram of the cont rol loop with a general disturbance observer.
where
A =
A
p
−B
p
D
c
C
p
B
p
C
c
0 0
−B
c
C
p
A
c
0 0
−B
M
D
c
C
p
B
M
C
c
A
M
0
−B
N
C
p
0 0 A
N
, (11.11)
B
1
=
B
p
−B
p
D
c
B
p
D
c
0 −B
c
B
c
0 −B
M
D
c
B
M
D
c
0 −B
N
B
N
, B
2
=
−B
p
0
−B
M
0
,
C
y
=
−D
N
C
p
−D
M
D
c
C
p
D
M
C
c
C
M
C
N
, (11.12 )
D
yw
=
0 −(D
N
+ D
m
D
c
) D
N
+ D
M
D
c
, D
yu
= −D
M
,
C
z
=
−C
p
0 0 0
, D
zw
= [0 − 1 0], D
zu
= 0 , (11.13)
and x
T
(k) = [x
T
p
(k) x
T
c
(k) x
T
M
(k) x
T
N
(k)] is the augmented state of P (z), C(z),
M(z), and N (z), and w
T
(k) = [d
1
(k) d
2
(k) n(k)].
Denote the transfer function from w to y as T
yw
= [T
yd
1
T
yd
2
T
yn
]. The H
∞
optimization method will be applied to design Q(z) to minimize the H
∞
norm
W
d
1
T
yd
1
W
d
2
T
yd
2
W
n
T
yn
∞
. (11.14)
W
d
1
, W
d
2
and W
n
are weightings. Here the models for disturbances d
1
, d
2
and
noise n are not needed. However, in order to have a desired suppression of the
H
∞
-Based Desig n for Disturbance Observer 219
disturbances d
1
, d
2
and the no ise n, appropriately chosen wei ghtings W
d
1
, W
d
2
and
W
n
are required which relies on our knowledge of the disturbances.
Different from the conventional disturbance observer, the general disturbance ob-
server does not need the inverse of the nominal plant model. As shown later, it is
able to suppress the disturbances in a low frequency range withou t much perfor-
mance degradation to higher frequency disturbances and noise.
The objective of the general disturbance observer design is then stat ed as: Given
a positive scalar γ and appropriate weightings W
d
1
, W
d
2
and W
n
, design a stable
Q(z) : (A
Q
, B
Q
, C
Q
, D
Q
) su ch that
k[W
d
1
T
yd
1
W
d
2
T
yd
2
W
n
T
yn
]
T
k
∞
< γ. (11.15)
The H
∞
control design problem can be solved via Theorem 5.4.
REMARK 11.1 The sensitivity function of the control system in Figure
11.2 with the general disturbance observer is given by
S(z) =
1 + QM
1 + P C + QM − P QN
. (11.16)
With the conventional disturbance observer in (11.7), (11.16) is equal to
S(z) =
1 + Qz
−d
1 + P C + Qz
−d
−P QP
−1
n
. (11.17)
Assume that in (11.16)
Q(z) = Q
n
(z) ×
z
d
n
B(z)
, P = P
n
, (11.18 )
then
S(z) =
1 + Q
n
z
d
n
/z
d
m
1 + P C + Q
n
z
d
n
/z
d
m
−Q
n
, (11.19)
which recovers the form in (11.17) when d
m
≥ d
n
, meaning that the con-
ventional disturbance observer is a special case of the general disturbance
observer.
REMARK 11.2
In Figure 11 .2, if the loop is cut at u, the transfer function from u to ˜e or
y is considered as a new plant, and derived as
P
equ
=
y
u
=
P
1 − (M − P N )Q
. (11.20)
220 Modeling and Control of Vibratio n in Mechanical Systems
An equivalent open loop is denoted by T
EQ−OL
(z), and
T
EQ−OL
(z) = P
equ
C =
P C
1 − (M −P N )Q
. (11.2 1)
Assume ideally that P
n
= P and d
m
= d
n
. Equation (11.20) becomes
P
equ
= P , which implies that the proposed general disturbance observer does
not influence the characteristics of open-loop P (z)C(z) greatly and thus the
stabili ty and performance achieved by the nominal control loop with controller
C(z) are maintained. This i s simila r to the conventional disturbance observer.
11.4 Application results
It has been shown that a disturbance observer is capable of estimating disturbances
and modeling error [128]. Hence, disturbance observers can be used to increase the
R/W head-positioning accuracy in hard disk drives (HDDs) by using its estimation
results to cancel the effect of the disturbances and modeling error. Fu rther, due to its
cost effectiveness and easy “add-on” i mplementation with min imal change required
to the existing feedback controller, the dist urbance observer wi thout using additional
sensors is frequently used to enhance the tracking performance of a hard disk drive
servo system, such as t he attenuation of distur bances [127], and the compensation of
VCM pivot friction [130].
Consider the VCM plant with model P (s) given in C hapter 10. The discretized
model with the sampling time T
s
= 1/30000 sec is given by (11.5) with
B(z) = 0.02399z
5
+ 0.1868z
4
− 0.03483z
3
−0.02165z
2
+ 0.1728z + 0.02025,
(11.2 2)
A(z) = z
6
− 3.052z
5
+ 4.657z
4
− 4.979z
3
+ 3.997z
2
− 2.399z + 0.7765 .
(11.2 3)
The controller C(z) is the combination of a PID controller and two notch filters, and
given by
C(z) =
1.474 × 10
−5
z
6
−4.416 × 10
−5
z
5
+ 6.517 × 10
−5
z
4
− 6.621 × 10
−5
z
3
+5.015 × 10
−5
z
2
−2.872 × 10
−5
z + 9.053 × 10
−6
3.333 × 10
−5
z
6
−7.59 × 10
−5
z
5
+ 8.081 × 10
−5
z
4
−4.846 × 10
−5
z
3
+1.545 × 10
−5
z
2
−5.234 × 10
−6
z
.
(11.2 4)
Let
M(z) =
B(z)
z
6
, N (z) =
A(z)
z
6
, (11.25)
H
∞
-Based Desig n for Disturbance Observer 221
W
d
1
= 0.3, W
d
2
= 1 and W
n
= 1.5. A stable Q(z ) is then obtained via the H
∞
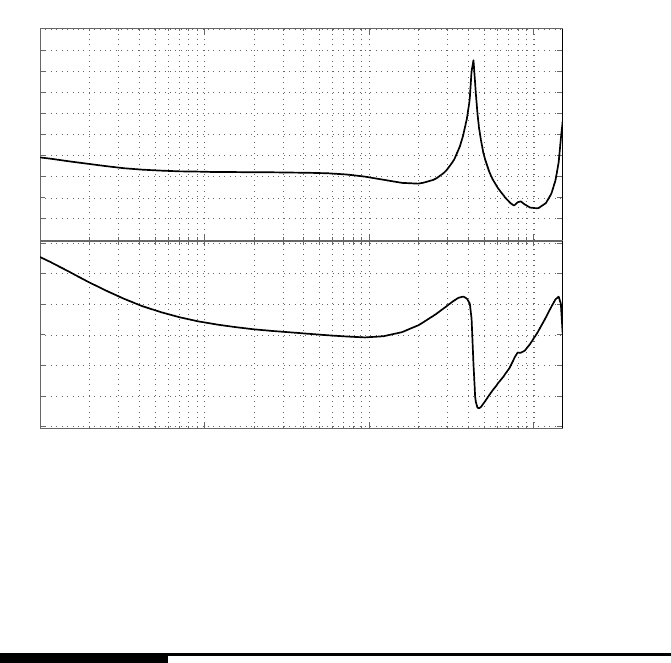
optimization in (11.14) and its frequency response is shown in Figure 1 1.3. No te
that the plant model inverse is not required in the general disturbance observer. This
benefit is of great significance, especially for nonminimum phase plant.
The sensitivity function |S(z)| is pl otted in Figure 11.4, from which it can be
seen that the designed disturbance observer is able to suppress disturbance with f re-
quency lower than 1 kHz witho ut causing much degradation for rej ecti on of higher
frequency disturb ance. The servo performance, such as bandwidth, will change with
different weightings W
d
1
, W
d
2
and W
n
. Thus by adjusting t he weightin gs accord-
ing to th e weights of d
1
, d
2
, and noise n in the position error signal, the designed
disturbance observer will result in a desired reduction rate of the error. To demon-
strate the effectiveness of the disturbance estimation in the time domain, we assume
that t he disturbances d
1
and d
2
and the noi se n are generated by d
1
= D
1
(s)w
1
,
d
2
= D
2
(s)w
2
and n = N
n
(s)w
3
, where
D
1
(s) =
0.0004(s
2
−83.39s + 9.741 × 10
5
)(s
2
+ 1616s + 9.626 ×10
6
)
(s
2
+ 125.7s + 3.948 × 10
5
)(s
2
+ 10.05s + 1.011 × 10
6
)
,
D
2
(s) and N
n
(s) are in (2.60) and (2.61), and w
i
(i = 1, 2, 3) are independent white
noises with unity variance.
With t he designed general disturbance observer, the estimate
ˆ
d
1
of d
1
is shown in
Figur e 11 .6. It follows t he original d
1
approximately. As a result, t he error signal is
shown in Figure 1 1.7. 50% reduction is achieved. The general disturb ance observer
is more effective to compensate for the input disturbance d
1
than d
2
and n. W
d
2
and
W
n
are selected as 1 and 1.5 is to keep the attenuation to d
2
and n achieved by the
nominal feedback controller C(z). With lower W
d
2
and W
n
and higher W
d
1
, the
attenuation to d
2
and n will be degraded, althoug h more suppression to d
1
will be
attained by using the disturbance observer.
Moreover, the conventional disturbance observer is desig ned for comparison. M(z)
and N(z) are given by
M(z) = z
−1
, (11.26)
N(z) = P
−1
n
(z)
=
5.2494(z
2
− 1.983z + 0.9834 )(z
2
−1.253z + 0 .9654)(z
2
+ 0.1836z + 0.817 9)
z(z + 0 .9501)(z + 0.1259)(z + 0.116)(z
2
− 1.22z + 0.9646)
.
(11.2 7)
A stable Q(z) for the conventional disturbance observer is designed with the H
∞
control method . Figure 11.5 sh ows th e resultant sensitivity f unction, which is similar
to the o ne from the general disturbance observer. However, the plant model inverse
needs t o be calculated.
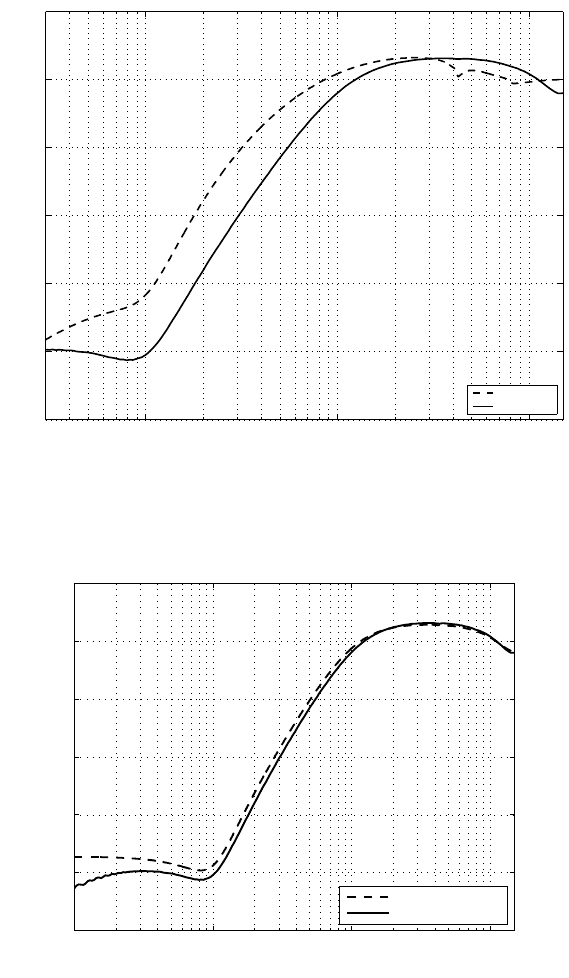
Experiment has been done with a LDV and a dSpace 1103. The measured sensi-
tivit y fun ct ions are shown in Fig ure 11.8, which agree with the simulation results in
Figur e 11.4. To evaluate the effect of the disturbance observer on the stabi lity and
performance achieved by the nominal controller C(z), T
EQ−OL
is measured with the
222 Modeling and Control of Vibratio n in Mechanical Systems
general d isturbance observer and the conventional disturbance observer, and shown
in Figure 11.9 and Figure 11.10. As expected, performance measures such as gain
margin and phase margin are not affected.
−10
−5
0
5
10
15
20
25
30
35
40
Magnitude (dB)
10
1
10
2
10
3
10
4
45
90
135
180
225
270
315
Phase (deg)
Bode Diagram
Frequency (Hz)
FIGURE 11.3
Frequency response of the designed Q(z).
11.5 Co nclusion
A general form of disturbance observer has been presented and designed based on
the H
∞
control method to achieve desir ed disturbance/noise r ejection. The distur-
bance observer does not need to solve the plant model inverse, and thus its d esign
is simplified and has great advantages over t he conventional distur bance observer,
especially for nonminimum phase plant. The simulation and implementation resul ts
show th at the general disturbance observer designed using t he method employed in
this chapter is able to effectively improve the attenuation of disturbance in low f re-
quency, and will not sacrifice the stability and performance of the nominal feedback
control loop.
H
∞
-Based Desig n for Disturbance Observer 223
10
2
10
3
10
4
−50
−40
−30
−20
−10
0
10
Magnitude(dB)
Frequency(Hz)
No DOB
With DOB
FIGURE 11.4
The sensitivity functions without and with the g eneral disturbance observer.
10
1
10
2
10
3
10
4
−50
−40
−30
−20
−10
0
10
Magnitude(dB)
Frequency(Hz)
Conventional DOB
General DOB
FIGURE 11.5
The sensitivity function comparison with the general and the conventional distur-
bance observers.