Du C., Xie L. Modeling and Control of Vibration in Mechanical Systems
Подождите немного. Документ загружается.

194 Modeling and Control of Vibratio n in Mechanical Systems
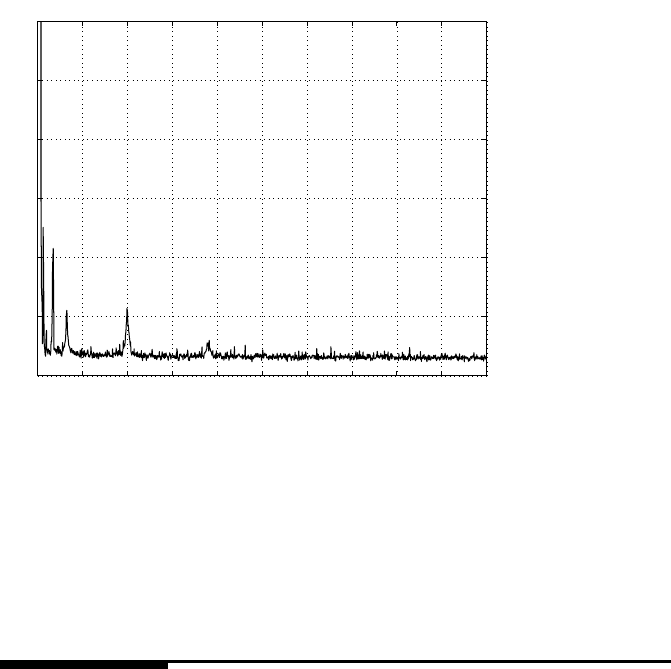
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
0
0.5
1
1.5
2
2.5
3
x 10
−3
Frequency (Hz)
NRRO magnitude (µm)
FIGURE 9.7
PES NRRO spectrum without servo control.
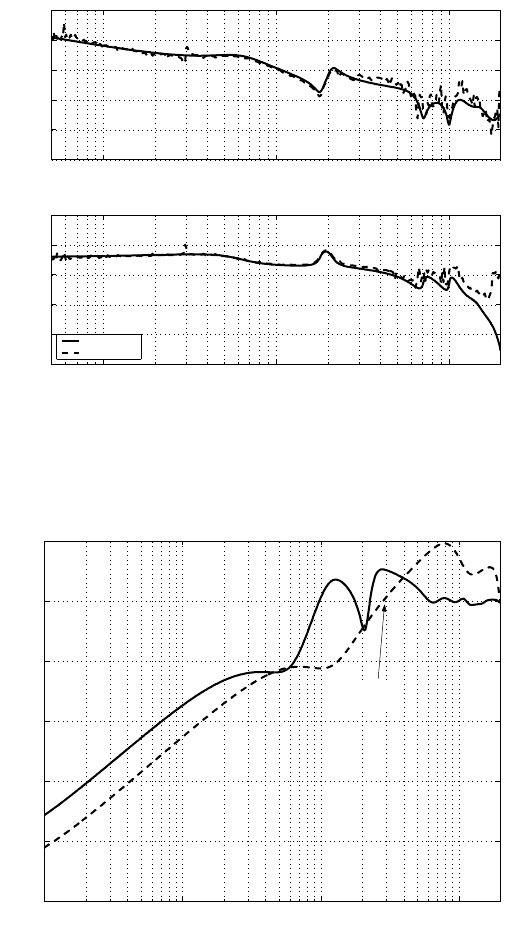
plotted in Figure 9.8 and Figure 9.10, respectively. The NRRO spectrum of the sys-
tem with the designed controll er is shown in Fig ure 9.11. Based on Figure 9.11, the
attenuation of disturbance centering at 2 kHz has improved by 35%.
9.5 Conclusion
This chapter h as addressed a combined control design method that incorporates the
generalized KYP Lemma-based design and the H
2
optimization. With the incorpo-
rated contro l design method, specific narrowband disturbances have been attenu ated
and simultaneously the positionin g error of the control system has been minimized.
The metho d has been applied to design a controller for a PZT microactuator to at-
tenuate disturbances at 650 Hz and 2 kHz where disk vibrations are dominant and
minimize the 3σ value of the overall PES. Simulation and experimental results have
demonstrated the effectiveness of the proposed method and verified that the position-
ing accuracy has been improved.
Combined H
2
and KYP Lemma-Based Control Design 195
10
2
10
3
10
4
−60
−40
−20
0
20
40
Magnitude (dB)
10
2
10
3
10
4
−800
−600
−400
−200
0
200
Frequency (Hz)
Phase (deg)
Simulation
Experiment
FIGURE 9.8
Open-loop frequency response.
10
1
10
2
10
3
10
4
−50
−40
−30
−20
−10
0
10
Magnitude (dB)
Frequency (Hz)
Bandwidth is
increased
FIGURE 9.9
Resultant sensitivity function (Solid line: with Spec. (i), (ii) and (iii); Dashed line:
with Spec. (i) and (ii)).
196 Modeling and Control of Vibratio n in Mechanical Systems
10
2
10
3
10
4
−30
−25
−20
−15
−10
−5
0
5
10
Frequency (Hz)
Magnitude (dB)
Simulation
Experiment
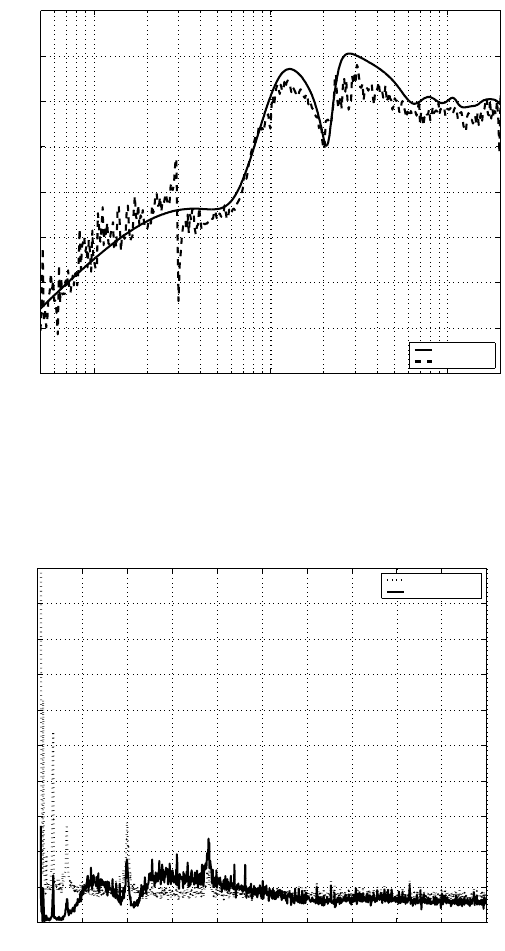
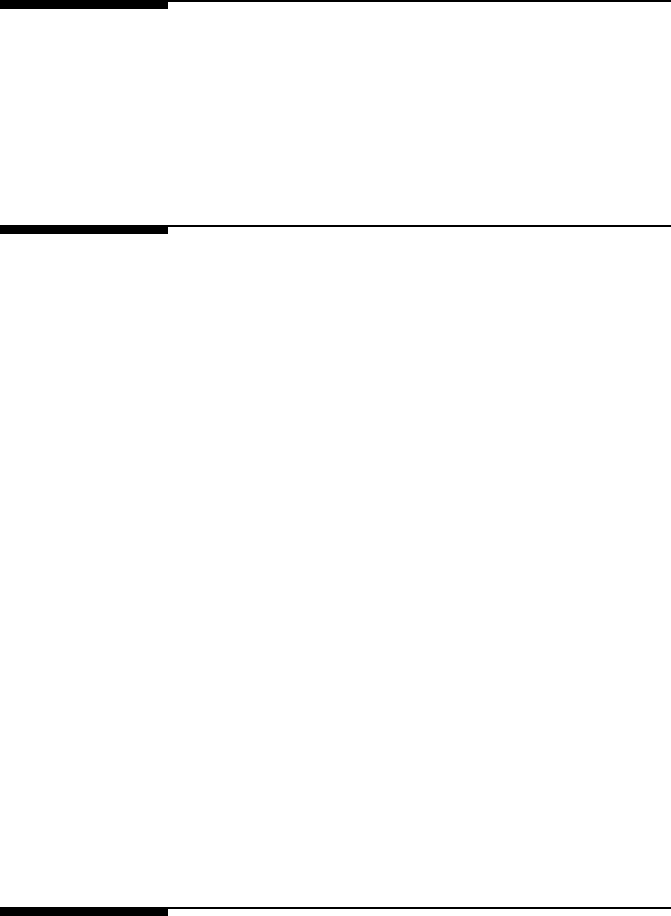
FIGURE 9.10
Resultant sensitivity function with all the thr ee requirements fulfill ed.
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
x 10
−3
Frequency (Hz)
NRRO magnitude (µm)
Without control
Closed loop
FIGURE 9.11
NRRO power spectrum with rejection of two specific disturbances at 0.65 and 2 kHz.
10
Blending Control for Multi-Frequency
Disturbance Rejecti on
10.1 Introduction
The blending control technique [120] aims to design a controller capable of simul-
taneously coping wi th different optimality criteria defined for variou s input-output
channels. If several targeted transfer functions are achieved respectively by their
designed controllers, it is shown that u nder some mild assumptions there exists a
unique controller capable of replicating these transfer functio ns and thus simultane-
ously achieving the performance attained b y each individual controller. Each indi-
vidual controller can be a static or a dynamic feedback controller derived by means
of standard opt imal and robust control methods such as the LQG/LTR control, H
2
or
H
∞
control. The blended contr oller can be easily computed by a procedure based on
simple linear algebra. In this chapter, we shall apply the blending control idea to deal
with the problem of rejecting several narrowband disturbances. The multi-frequency
disturbance rejection is for mulated as a control blending p roblem. Control design for
each disturbance rejection is carried out by using the H
2
optimal control method. The
ultimate controller is obtain ed by blending all these H
2
controllers and is expected
to be abl e to reject all these disturbances simultaneously. In this chapter, the con-
trol bl end ing is respectively app lied in the control design for a 1.8-inch H D D V CM
actuator in three cases, (1) reject two disturbances of frequencies higher th an band-
width, (2) reject three disturb ances w ith frequencies higher than bandwidth, and, (3)
reject one disturbance with frequency lower than bandwidth and another one higher
than bandwidth. Note that this chapter presents a syst ematic approach using dis-
turbance models on ly, which leads to t he achievement of a satisfactory rejection of
multi-frequency narrow band disturbances.
10.2 Co ntrol bl ending
Control blending accoun ts for the problem of simultaneous performance achieve-
ments. It involves designing an individual controller for each perfor mance specifica-
197
198 Modeling and Control of Vibratio n in Mechanical Systems
tion and blending all the controllers to obtain an ultimate cont roller.
Consider the system in state space:
˙x(t) = Ax(t) + Bu(t) +
r
X
i=1
E
i
w
i
(t), (10.1)
y
1
(t) = C
1
x(t) + D
1
u(t), (10.2)
y
2
(t) = C
2
x(t) + D
2
u(t), (10.3)
···
y
r
(t) = C
r
x(t) + D
r
u(t), (10.4)
e(k) = C
e
x(k) + D
e
u(k) + v (k), (10.5)
where x(t) ∈ R
n
x
, u(t) ∈ R
n
u
, y
i
(t) ∈ R
p
i
, w
i
(t) ∈ R
q
i
, e(t) ∈ R, and A, B, C
i
,
D
i
, E
i
, C
e
, and D
e
are matrices of approp riate dimensions.
The following two assumption s are necessary in the control blending scheme.
Assumption 10.1: (A, B) is stabilizable.
Assumption 10.2: The n
x
×s matrix,
E =
E
1
E
2
··· E
r
, (10.6)
where s =
P
r
i=1
q
i
, h as full column rank.
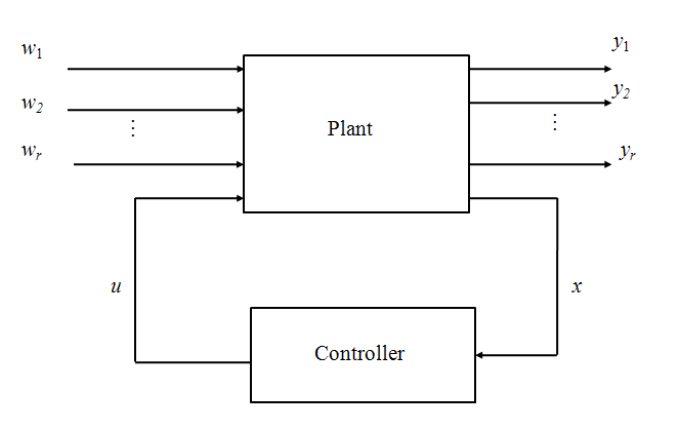
FIGURE 10.1
Blending control scheme.
Blending Control for Multi-Frequency Disturba nce Rejection 199
10.2.1 State feedback control blending
The feedback control scheme of the above system is shown in Figure 10.1, where the
controller is expressed as
˙x
s
(t) = A
s
x
s
(t) + B
s
x(t) (10.7)
u(t) = C
s
x
s
(t) + D
s
x(t). (1 0.8)
The closed-loop system fro m w
i
to y
i
, i = 1, 2, ···, r is then described by
A
cl
E
cl
C
cl
0
=
A + BD
s
BC
s
E
1
E
2
··· E
r
B
s
A
s
0 0 ··· 0
C
1
+ D
1
D
s
D
1
C
s
0 0 ··· 0
C
2
+ D
2
D
s
D
2
C
s
0 0 ··· 0
.
.
.
.
.
.
.
.
.
.
.
. ···
.
.
.
C
r
+ D
r
D
s
D
r
C
s
0 0 ··· 0
. (10.9)
For the system ( 10.1)−(10.5), we consider the static state feedback control
u(t) = K
i
x(t), i = 1, 2, ···, r. (10.10)
The individual closed-loop tr ansfer function is given by
¯
T
i
(s) =
¯
C
i
(sI −
¯
A
i
)
−1
E
i
, (10.11 )
with
¯
A
i
= A + BK
i
,
¯
C
i
= C
i
+ D
i
K
i
. (10.12)
The result in [120] reads t hat there exists a single dynamic compensator of the
form (10.7)−(10.8) of o rder µ = n
x
(r − 1), such th at 1). the closed-lo op system is
stable with spectrum
σ(A
cl
) =
∪
i
σ(
¯
A
i
); (10.13)
and 2). for each i, the transfer function T
i
(s) from the i
th
input to the i
th
output
coincides with the one given by the i
th
gain K
i
, i.e.,
T
i
(s) =
¯
T
i
(s). (10.14)
The significance of the result lies in the fact that if K
i
, i = 1, 2, ···, r, are the
static compensators each of which optimizes some performance criteria, then there
exists a single dynamic compensator which simultaneously achieves the same per-
formances. The single dynamic compensator of the form in (10.7)−(10.8) can be
found following the procedure below.
Procedure 10 .1
200 Modeling and Control of Vibratio n in Mechanical Systems
• Let K
i
, i = 1, 2, ···, r be th e stat ic state feedback controllers each of which
asymptotically stabilizes the plant, i.e.,
¯
A
i
= A + BK
i
is asymptotically
stable.
• For each i, cho ose a matrix
˜
E
i
of dimension n
x
×(n
x
−q
i
) such that [E
i
˜
E
i
]
is square and invertibl e. This is possible under Assumption 10.2.
• Choose matrices
˜
Z
i
of dimension µ ×(n
x
−q
i
) (µ = n
x
(r −1)) such that the
matrix
E
1
E
2
··· E
r
˜
E
1
˜
E
2
···
˜
E
r
0 0 ··· 0
˜
Z
1
˜
Z
2
···
˜
Z
r
(10.1 5)
is invertible.
• Define
Z
i
= [0
˜
Z
i
][E
i
˜
E
i
]
−1
, (10.16)
and
V
i
= Z
i
¯
A
i
. (10.17)
• Form the square matrix Ξ as
Ξ =
I I ··· I
Z
1
Z
2
··· Z
r
. (10.18)
• Compute th e controller matrices A
s
, B
s
, C
s
, D
s
as
D
s
C
s
B
s
A
s
=
K
1
K
2
··· K
r
V
1
V
2
··· V
r
Ξ
−1
. (10.19)
The or der of th e blended controller is n
x
(r −1) which is very hi gh. Theoretically
to match r different transfer functi ons T
i
, n
x
(r − 1) + n
x
= n
x
r different poles
have to be allocated and a full order contr oller is required. In practical application,
however, reducing the order is needed as long as it i s possibl e.
10.2.2 Output feedback control blending
When the full state variables of the plant are not available, the feedback control has
to rely on some measurements given by
y
p
(t) = C
y
x(t), (10.20)
where y
p
∈ R
p
. The output feedback control ler takes the form
˙x
c
(t) = A
c
x
c
(t) + B
c
y(t) (10.21)
u(t) = C
c
x
c
(t) + D
c
y(t). (10.22)
Blending Control for Multi-Frequency Disturba nce Rejection 201
The closed-loop system fro m w
i
to y
i
, i = 1, 2, ···, r is th en descri bed by
A
cl
B
cl
C
cl
0
=
A + BD
c
C
y
BC
c
E
1
E
2
··· E
r
B
c
C
y
A
c
0 0 ··· 0
C
1
+ D
1
D
c
C
y
D
1
C
c
0 0 ··· 0
C
2
+ D
2
D
c
C
y
D
2
C
c
0 0 ··· 0
.
.
.
.
.
.
.
.
.
.
.
. ···
.
.
.
C
r
+ D
r
D
c
C
y
D
r
C
c
0 0 ··· 0
. (10.23)
Assumption 10.3: The composed p × s matri x,
E =
C
y
E
1
C
y
E
2
··· C
y
E
r
, (10.24)
where s =
P
r
i=1
q
i
, h as full column rank.
Consider the static st at e feedback control as stabilizing compensators
u(t) = K
i
x(t), i = 1, 2, ···, r. (10.25)
The corresponding cl osed-loop transfer function from w
i
to y
i
is given b y
¯
T
i
(s) =
¯
C
i
(sI −
¯
A
i
)
−1
E
i
, (10.26 )
with
¯
A
i
= A + BK
i
,
¯
C
i
= C
i
+ D
i
K
i
. (10.2 7)
The th eorem on output blending control in [120] says that there exists a single
dynamic compensator of the form (10.21)−(10.22) of or der µ = n
x
r − p, su ch that
1). the spectrum of the closed-loop system satisfies
∪
i
σ(
¯
A
i
) ⊆ σ(A
cl
); (10.28)
and 2). for each i, the transfer functio n T
i
(s) from the i
th
input w
i
to the i
th
output
y
i
coincides with the one given by the i
th
gain K
i
, i.e.,
T
i
(s) =
¯
T
i
(s). (10.29)
The single d ynamic output controller of the form in (10.21)−(10.22) can be found
following the procedure below.
Procedure 10 .2
• Let K
i
, i = 1, 2, ···, r b e the static state feedback controllers each of which
asymptotically stabilizes the plant, i.e., the matrix
¯
A
i
= A + BK
i
is asymp-
totically stable.
• For each i, choose a matrix
˜
E
i
of dimension n ×(n −q
i
) such that [E
i
˜
E
i
] is
square and invertible. This is possi ble under Assumption 10.3.
202 Modeling and Control of Vibratio n in Mechanical Systems
• Choose matrices
˜
Z
i
of dimension µ × (n
x
− q
i
) (µ = n
x
r − p) such that the
matrix
C
y
E
1
C
y
E
2
··· C
y
E
r
C
y
˜
E
1
C
y
˜
E
2
··· C
y
˜
E
r
0 0 ··· 0
˜
Z
1
˜
Z
2
···
˜
Z
r
(10.3 0)
is invertible.
• Define
Z
i
= [0
˜
Z
i
][E
i
˜
E
i
]
−1
, (10.31)
and
V
i
= Z
i
¯
A
i
. (10.32)
• Form the square matrix Ξ as
Ξ =
C
y
C
y
··· C
y
Z
1
Z
2
··· Z
r
. (10.33)
• Compute th e controller matrices A
c
, B
c
, C
c
, D
c
as
D
c
C
c
B
c
A
c
=
K
1
K
2
··· K
r
V
1
V
2
··· V
r
Ξ
−1
. (10.3 4)
The procedure is quite simple to implement, and it is proved in [120] that the
matrix Ξ is indeed an invertible matrix.
Consider the system
¯
A
¯
E
¯
N 0
=
¯
A
1
0 ··· 0 E
1
0 ··· 0
0
¯
A
2
··· 0 0 E
2
··· 0
.
.
.
.
.
. ···
.
.
.
.
.
.
.
.
. ···
.
.
.
0 0 ···
¯
A
r
0 0 ··· E
r
C
y
C
y
··· C
y
0 0 ··· 0
. (10.35)
The following Proposition advises on the stabilit y of the controller matrix A
c
.
Propositi on 10.1 [120]
i). The controller matrix A
c
is not stab le if system (10.35) h as unstable invariant
zeros.
ii). The controller matrix can be generically chosen as a stability matrix if system
(10.35) is of minimum phase.
iii). If E is sq uare then the controller matrix is sta ble if and onl y if system (10.35)
is of minimum ph ase.

Blending Control for Multi-Frequency Disturba nce Rejection 203
10.3 Co ntrol blending ap plication i n multi-frequency disturbance
rejection
In this section, we first formulate the problem of multi- frequency disturbance rejec-
tion into the above control blending framework. Then, Procedure 10.1 is used to
design a blended controller associated with the static state feedback contr oller de-
signed via th e H
2
optimal control method. To facilitate the single dy namic state
feedback controller, a full state observer i s required.
10.3.1 Problem formulation
The closed con trol loop of a mechanical actuation system is shown in Figure 10.2,
where P (s) is the actuator model, C(z) is the feedback controller, e is the measured
error signal. D
i
(s), i = 1, 2, ···, r are disturbance models and w
i
are white noises
with unity variances. v is the measurement noise with σ
v
as its standard deviation.
Here, we focus on the rejection of output disturbance D
i
(s), considering that an
input disturbance can be converted to an output disturbance.
From Figure 10.2, with Ref = 0 we have
y = S(z)(D
1
(z)w
1
+ D
2
(z)w
2
+ ···+ D
r
(z)w
r
) + (1 − S(z))v. (10.36)
The multi-frequency disturbance rejection problem is stated as fo llows: For nar-
rowband disturbances d
i
, i = 1, 2, ···, r, desig n a feedback controller C(z) such
that the closed-loop system i s stable, and the disturbances d
i
in different frequency
ranges [f
iL
, f
iH
] can be suppressed simultaneously.
In Fig ure 10.2, denote (A
p
, B
p
, C
p
, D
p
) as the state-space realizations of P (z)
with state vector x
p
∈R
n
p
, and (A
d
i
, B
d
i
, C
d
i
, D
d
i
) as the state-space realizations
of D
i
(z) with state vector x
d
i
∈R
n
d
i
. D
i
(s) is proposed to have the form:
D
i
(s) =
k
di
(s + 2ζ
i
ω
i
)
s
2
+ 2ξ
i
ω
i
s + ω
2
i
, i = 1, 2 , ···, r, (10.37)
with frequency ω
i
, damping ratio ξ
i
, ζ
i
used to adjust the damping of D
i
, and gain
k
di
. Clearly, D
d
i
= 0.
To ensure necessary rejection of low-frequency disturbances, a pre-compensation
integrator Int(z) is introduced which is shown in Figure 10.3 and given b y
˜u(k + 1) =
˜
ke(k) + ˜u(k). (10.38 )
Denote the output due to d
i
by y
i
. Then the combined system is given as fo llows.
x(k + 1) = Ax(k) + Bu(k) +
r
X
i=1
E
i
w
i
(k), (10.39)
y
1
(k) = C
1
x(k) + D
1
u(k), (10.40)