Du C., Xie L. Modeling and Control of Vibration in Mechanical Systems
Подождите немного. Документ загружается.

164 Modeling and Control of Vibratio n in Mechanical Systems
LEMMA 8.1
[62] Consider the sensitivity function S(z) =
˜
C(zI −
˜
A)
−1
˜
B +
˜
D with
˜
A being
stable. Then, for a given scalar r > 0, | S(e
jθ
)| ≤ r over a finite frequency
range if and only if there exist Hermi tian matrices U and V ≥ 0 such that
˜
A
˜
B
I 0
∗
Σ
˜
A
˜
B
I 0
+
0 0
0 −r
2
˜
C
˜
D
∗
˜
C
˜
D
−I
≤ 0, (8.7)
where
(i) for low frequency range |θ| ≤ θ
l
,
Σ =
−U V
V U − (2cosθ
l
)V
; (8.8)
(ii) for middle frequency range θ
1
≤ θ ≤ θ
2
,
Σ =
−U e
jθ
c
V
e
−jθ
c
V U −(2cosθ
d
)V
,
θ
c
= (θ
1
+ θ
2
)/2, θ
d
= (θ
2
−θ
1
)/2; (8.9)
(iii) for high frequency range |θ| ≥ θ
h
,
Σ =
−U −V
−V U + (2cosθ
h
)V
. (8.10 )
For a given contro ller C(z), t he above gives a necessary and sufficient condition
for evaluating if |S(z)| ≤ r over so me given frequency range in terms of LMI.
However, (8.7) is no longer an LMI when the controller C(z) = (A
c
, B
c
, C
c
, D
c
)
is to be design ed since
˜
A and
˜
B involve the unknown parameters A
c
, B
c
, C
c
and
D
c
. Further, it is not possible to be converted to an LMI by Schur complement since
the matrix Σ is not definite. To overcome this difficulty, in the following we apply a
Youla parametrization approach where the controller C(z) is now of the structure as
shown in Figure 8.1.
Let K(z) be a given observer based controller that can be designed using ap-
proaches such as the LQG contro l:
ˆx(k + 1) = A
p
ˆx(k) + B
p
u(k) + L(z(k) + C
p
ˆx(k)), (8.11)
u(k) = −M ˆx(k ). (8.12 )
Then, as stated in Chapter 5, the set of sensitivity functions can be parameterized as
S(z) = T
11
(z) + T
12
(z)Q(z)T
21
(z) (8.13)
Generalized KYP Lemma-Based Loop Shaping Control Design 165
where Q(z) is a st able transfer functio n to be designed and
T
11
(z) T
12
(z)
T
21
(z) 0
= C
T
(zI − A
T
)
−1
B
T
+ D
T
,
A
T
B
T
C
T
D
T
=
A
p
−B
p
M
0 B
p
−LC
p
A
p
− B
p
M + LC
p
L B
p
−C
p
D
p
M 1 −D
p
−C
p
C
p
1 0
. (8.14)
If Q(z) has the state-space realization (A
q
, B
q
, C
q
, D
q
), then the designed con-
troller C(z) is given by
A
c
=
A
p
−B
p
M + LC
p
+ B
p
D
q
C
p
B
p
C
q
B
q
C
p
A
q
, (8.15)
B
c
=
L + B
p
D
q
B
q
, C
c
=
−M + D
q
C
p
C
q
,
D
c
= D
q
. (8.16 )
Denote the state space representatio ns of T
11
(z) and T
12
(z)T
21
(z) by (A
t11
, B
t11
,
C
t11
, D
t11
) and (A
t
, B
t
, C
t
, D
t
), respectively, then from (8.13) a state space model
of S(z) can be written as
˜
A =
A
t11
0 0
0 A
t
0
0 B
q
C
t
A
q
,
˜
B =
B
t11
B
t
B
q
D
t
, (8.17 )
˜
C =
C
t11
D
q
C
t
C
q
,
˜
D = D
t11
+ D
q
D
t
. (8.18)
Let Q(z) be an FIR filter:
Q(z) = q
0
+ q
1
z
−1
+ q
2
z
−2
+ ... + q
τ
z
−τ
, (8.19)
q = [q
0
q
1
q
2
, ... , q
τ
] (8.20 )
which is to b e designed so that the required bounded realness of the sensitivity func-
tion is satisfied. It is known that a state space realization for Q(z) can be given
by
A
q
=
0 I
τ−1
0 0
, B
q
=
0
(τ−1)×1
1
,
C
q
= [q
τ
q
τ−1
··· q
1
] , D
q
= q
0
,
where I
τ−1
is the identity matrix o f dimensio n (τ −1) ×(τ −1) and 0
(τ−1)×1
is the
zero matrix of dimension (τ −1) ×1. Note that the filter parameter q to be designed
only app ears in C
q
and D
q
. Therefore, from (8.17)−(8.18), we know that q exists
in
˜
C and
˜
D only. In this case, (8.7) defines an LMI in terms of t he variables U,
V , and q. Hence, U, V , and the design parameter q can be computed via a convex
optimization.
166 Modeling and Control of Vibratio n in Mechanical Systems
The KYP Lemma-based control design can be carried out f ollowing the steps:
Procedure 8.1
Step 1. Compute M and L using MATLAB commands M = dlqr(A
p
, B
p
, C
T
p
C
p
,
R) and L = A
p
· d lqe(A
p
, B
p
, − C
p
, W
d
, W
v
), where R is the weighting for the
control input in the cost function
J =
X
(ˆx
T
C
T
p
C
p
ˆx + u
T
Ru)
for linear quadratic r egulator design, and W
d
and W
v
are the variance matrices of
process noise and measurement noise for the Kalman estimator design. Here in
the KYP Lemma-based control design, R, W
d
, and W
v
can be chosen as identity
matrices.
Step 2. Compute T
11
(z), T
12
(z) and T
21
(z) from (8.14).
Step 3. Obtain the state space model (
˜
A,
˜
B,
˜
C,
˜
D) in (8.17)−(8.18).
Step 4. Based on disturbance spectrum, specify the positive scalars r
i
and fre-
quency points f
i
(i = 1, ..., N ) for the sensitivity function
|S(f
i
)| < r
i
, f
i1
≤ f
i
≤ f
i2
(8.21 )
where f
i1
and f
i2
define the f requency range. For each sp ecification on the resultant
sensitivit y function in the frequency range, construct the LMI (8.7) in terms of the
variables U , V , and q with r = r
i
.
Step 5. Obtain q, U and V by solving these LMIs using MATLAB LMI toolbox.
If the LMIs are not solvable, the specifications given i n Step 4 are to be adjusted.
Step 6. Obtain the controller parameters from (8.15)−(8.16).
8.4 Peak filter
Many other control methods are available to reject narrowband disturbance, such as
linear time invariant feedback methods using classical design and modern fr equ ency
shaping and filt er shaping, and adaptive feedforward methods using higher harmonic
control and LMS algorithm [57]. It h as been shown that most of these methods would
result in a compensator with light ly damped complex poles at the center frequency
of the disturbance. Such a compensator has high gains at specific frequency. It is
named as peak filter according to its shape of frequency response. The peak filter
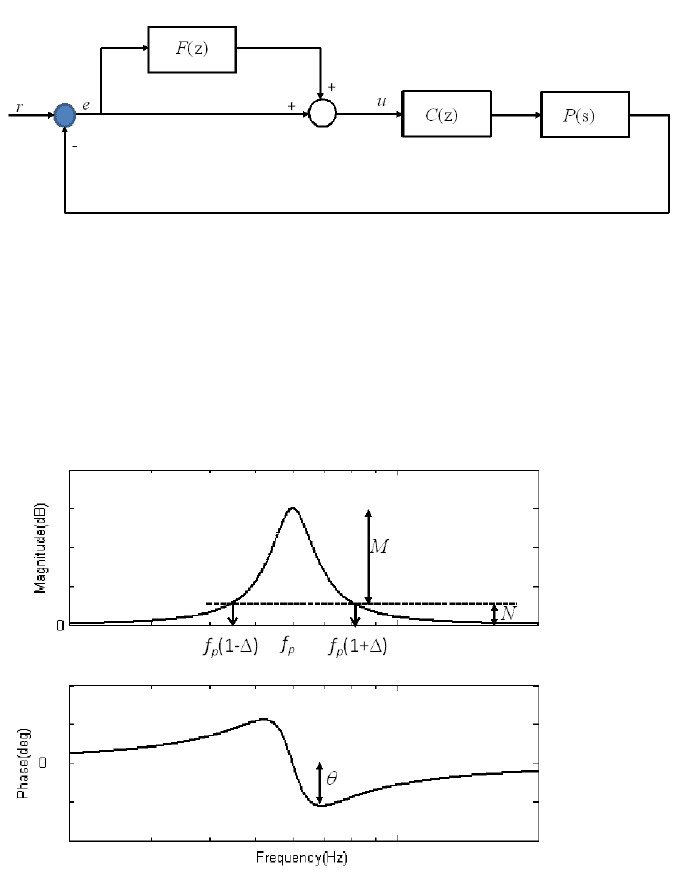
F (s) works in the control loop as in Fig ure 8.2 with its discretized for m F (z).
8.4.1 Conventional peak filter
Conventionally, the peak filter is described as t he following model
F (s) =
s
2
+ 2ξ
1
ω
p
s + ω
2
p
s
2
+ 2ξ
2
ω
p
s + ω
2
p
, (8.22)
Generalized KYP Lemma-Based Loop Shaping Control Design 167
FIGURE 8.2
Peak filter F in the n ominal feedback loop.
FIGURE 8.3
Peak filter in the frequency domain.

168 Modeling and Control of Vibratio n in Mechanical Systems
where ω
p
= 2πf
p
is the center frequency in radian/sec and ξ
1
and ξ
2
are the damping
ratios with ξ
1
> ξ
2
. The peak filter F (s) can be designed according to its Bode plot,
as illustrated in Figure 8.3. M and N denote the peak height, ∆ stands for the peak
width corresponding to N. Let
m = 10
M/20
, n = 10
N/20
. (8.23)
When M ≫ N , ξ
1
and ξ
2
are determined approximately b y
ξ
1
=
∆
2
+ 2∆
2∆ + 2
√
n − 1, (8.24 )
ξ
2
=
ξ
1
m
. (8.25 )
The maximum phase loss θ caused b y the pair of the lightly damped complex poles
is given b y
θ = arctan
m −1
2
√
m
. (8.26 )
It is noticed that the conventional version of the p eak filter induces additional
phase loss. The phase loss negatively impacts the phase margin and distorts the
gain of the sensitivity fun ction around the disturbance frequency, particularly for
the disturbance near the 0 dB crossover frequency. To overcome t he drawback, a
phase-lead peak filt er [ 118] was proposed.
8.4.2 Phas e lead peak filter
The phase filter is improved by adding a differentiator to provide addition al phase
lead such that the phase margin is preserved and the sensitivity function curve is
smoothly shaped.
Let
T
0
(s) =
P (s)C(s)
1 + P (s)C(s)
. (8.27)
The peak filter adopts the following form
F (s) = K
−sin(φ)s
2
+ ω
0
cos(φ)s
s
2
+ 2ξω
0
s + ω
2
0
, (8.28)
where ω
0
is the disturbance frequency at which high disturbance rejection is required,
ξ ∈ (0, 1) is the damping ratio, φ is the phase angle determined by
φ = arg[T
0
(jω
0
)] ∈ [ −π, π], (8.29)
and 0 < K < γ is the positive filter gain. Let
G(ω, K) = 1 + T
0
(jω)F (jω), (8.30)
Generalized KYP Lemma-Based Loop Shaping Control Design 169
and γ is the minimal positive real solution of the following two equations:
Re[G(ω, γ)] = 0, (8.31 )
Im[G(ω, γ)] = 0. (8.32 )
An estimate of ξ and K in the filter (8 .28) is given by
ξ =
∆
d
(ω
0
+ 0.5∆
d
)
4ω
2
0
, (8.33 )
K = (10
M/20
− 1)
2ξ
T
0
(jω
0
)
, (8.34)
where the disturbance bandwi dth ∆
d
is defined as the frequency difference between
the two p oints whose magnitudes are 1/
√
2 times of the peak value, and M in unit
dB is the desired reduction rati o of the narrowband disturbance.
The disturbance filter in (8.28) is a general high-gain controller to reject narrow-
band disturbances in a specific frequency range because the filter zero lo cati on can
be automatically shifted according to the disturbance frequency associated with the
baseline servo syst em with C(s) and P (s).
8.4.3 Group peak filter
The group filtering scheme is used to compensate multiple frequency narrowband
disturbance. A parallel structure of the group peak filter is described as
F (s) =
n
X
i=1
F
i
(s), (8.35 )
where the sub-filter F
i
(s) is given by (8.28) with the corresponding filter parameters
(ω
i
, φ
i
, ξ
i
, K
i
).
An illust ration example is shown in Figure 8.4 with t he sensitivity functions plot-
ted before and after activating the group filter w ith two sub-filters at ω
1
= 2π700
and ω
2
= 2π2000. The filters associated with so lid and dashed curves have different
parameters.
8.5 Application in h igh frequency vibration rejection
In this section, we shall provide an example to demonstrate the design and effective-
ness of the pr oposed KY P based contro l to r eject narrowband disturbances at high
frequencies. The previously intr oduced peak filt ering method finds it difficult to deal
with dist urbances in high frequency range, especially near the actuator resonance
modes.
170 Modeling and Control of Vibratio n in Mechanical Systems
10
2
10
3
10
4
−35
−30
−25
−20
−15
−10
−5
0
5
10
Frequency (Hz)
Magnitude (dB)
with filter
with filter
without filter
FIGURE 8.4
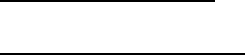
Sensitivity functions before and after grou p peak filteri ng activated.
FIGURE 8.5
PZT microactuator attached to VCM actuator arm.
Generalized KYP Lemma-Based Loop Shaping Control Design 171
0 2000 4000 6000 8000 10000 12000
0
0.5
1
1.5
2
2.5
3
x 10
−3
Frequency(Hz)
PES NRRO power sepctrum(µm)
8 kHz
10 kHz
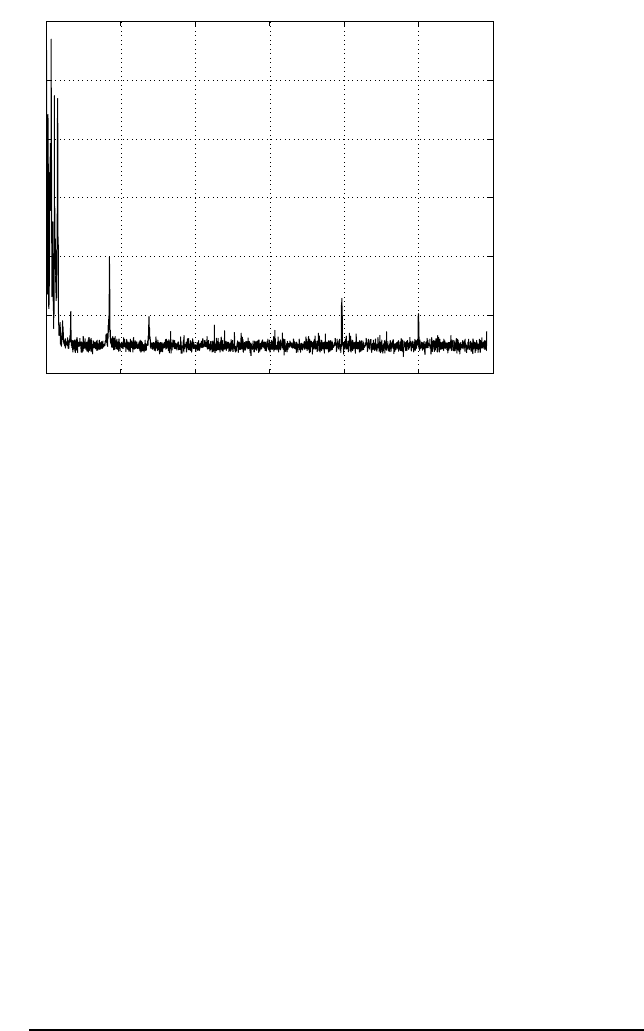
FIGURE 8.6
Power spectrum of the position error befor e servo control.
A. System models
Figur e 8.5 shows one k ind o f microactuators for HDDs, which is a PZT actuated
suspension attached to a VCM actuator arm. Fig ure 8.6 shows an example of the
main disturbances that exist in the hard disk drive servo system. Besides the distur-
bances of low frequencies, the system suffers from the high f requency disturbances
around 8 kHz and 10 kH z, which are induced by air turbulence to suspensions or
sliders in HDDs. For higher rotatio nal speed HDDs, these dist urbances appear mor e
promin ent and create a significant impact on the positioning accuracy of the R/W
head. Here we emplo y the generalized KYP Lemma to design a feedback control
C(z) for the microactuator such that the sensitivity function S(z) satisfies the re-
quired specifications so as to reject disturbances around 8 kHz and 10 kHz. The
desired specifications for the sensitivity function S(z) are set as
Spec.(a) |S(f )| < 0 dB, f ≤ 2 kHz,
Spec.(b) |S(f )| < −0.35 dB, 9950 Hz ≤ f ≤ 10050 Hz,
Spec.(c) |S(f )| < −1.41 dB, 7950 Hz ≤ f ≤ 8050 Hz.
Spec. (a) means to guarantee a 2 kHz b and w idth at least.
The transfer function of the PZT microactuator is given by
P zt(s) =
180828605599509(s
2
+ 3079s + 1.934 × 10
9
)
(s + 1.257 × 10
5
)(s
2
+ 791.7s + 1.567 × 10
9
)(s
2
+ 5089s + 7.195 × 10
9
)
,
(8.36 )
172 Modeling and Control of Vibratio n in Mechanical Systems
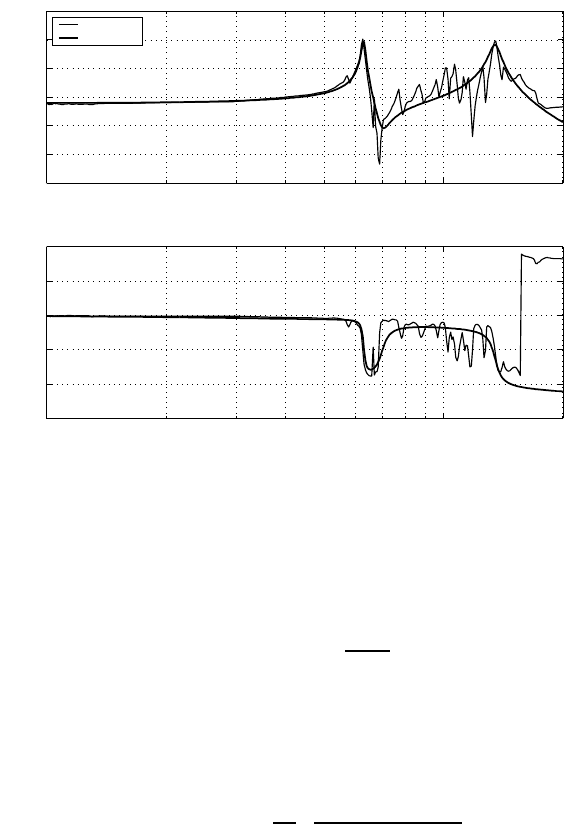
which is ob tained by curve-fitting to its frequency response measured via DSA. A
comparison between the measured and the modeled frequency responses is shown i n
Figur e 8.7, where it is noticed that there are two dominant resonance modes at 6.3
kHz and 13. 5 kHz. P zt(s) is discretized using the zero-ord er-hold method to obtain
P zt(z). The sampling frequency being used is 4 0 kHz.
10
3
10
4
−40
−30
−20
−10
0
10
20
Magnitude(dB)
measured
modeled
10
3
10
4
−300
−200
−100
0
100
200
Phase(deg)
Frequency(Hz)
FIGURE 8.7
PZT micro actuator f requency response.
B. Controller design and LDV based experiment results
The plant P zt (s) is pr e-compensated by the integrator:
Int(z) =
6.3z
z − 1
, (8.37)
and two notch filters for suppressing the two main resonances at 6.3 kHz and 13.5
kHz before the KYP Lemma approach is applied to design a controller so that the
specifications (a), (b) and (c) can be satisfied. The notch filter is design ed as the
following form:
Notch =
ω
2
2
ω
2
1
·
s
2
+ 2ξ
1
ω
1
s + ω
2
1
s
2
+ 2ξ
2
ω
2
s + ω
2
2
, (8.38)
where ω
1
is the frequency of the resonance to be suppressed , ξ
1
< ξ
2
, and ω
2
and
ω
1
shoul d be chosen to be close to each other so that the resultant notch fil ter will
Generalized KYP Lemma-Based Loop Shaping Control Design 173
not influence the system stability. Here for the model (8.36) the notch filters after
discretization are as follows.
Notch1 (z) =
1.177z
2
−1.279z + 1 .154
z
2
−0.8751z + 0.9259
,
Notch2 (z) =
0.4011z
2
+ 0.3972z + 0.3532
z
2
+ 0.1391z + 0.007 922
.
(A
p
, B
p
, C
p
, D
p
) in (8.3)−(8.4) is a state space descrip tion of the combined
system P (z) = Int(z) · Notch1(z) · N otch2(z) · P zt(z). Q(z) is chosen as the
1
st
-order FIR filter (8.19), and q
0
and q
1
are to be solved via the KYP Lemma.
As mentioned previously in Step 1 of the control design procedure, M and L are
obtained using MATLAB commands, i.e. M = dlqr(A, B
2
, C
T
1
C
1
, R) and L =
A · dlqe(A, B
2
, C
1
, W
d
, W
v
).
Next we use the KYP Lemma to search for the coefficients of Q (z). Three LMIs of
the f orm (8 .7) with Σ in (8.8) and (8.9) need to be solved in order to achieve Spec. (a),
(b) and ( c), respectively. The obtained q
0
and q
1
are q
0
= −0.4117, q
1
= 0.6371.
As such, C(z) can be obtained via (8.15)−(8.16). The resulting controller for the
PZT microactuator is C(z) · Int(z) · N otch1(z) · N otch2(z), and the sensitivity
function i s sh own in Figure 8.8. It can be observed in Figure 8.8 that wi th Q(z), the
sensitivit y function is less than −4 dB and −2 dB at 8 kHz and 10 kHz respectively,
which means that specifications (a)−(c) have been satisfied by the searched Q(z).
The sensitivity function before the KYP Lemma based design is al so shown in Fig ure
8.8 where it can be seen that the required specifications are not met. Moreover,
as seen from Figure 8.9, the gain margin and the phase margin are 12 dB and 67
deg, higher than 7.7 dB and 63 deg before the KYP design. Observed from Fi gures
8.8 and 8.9, the KYP design increases the loop gain around 9 kHz, which results
in the reduction of the sensitivity function from 8 to 10 kHz. The price for this
compensation is a bit lower loop gain at lower frequencies, which is consistent with
the Bode Integral constraint for sensitivity function.
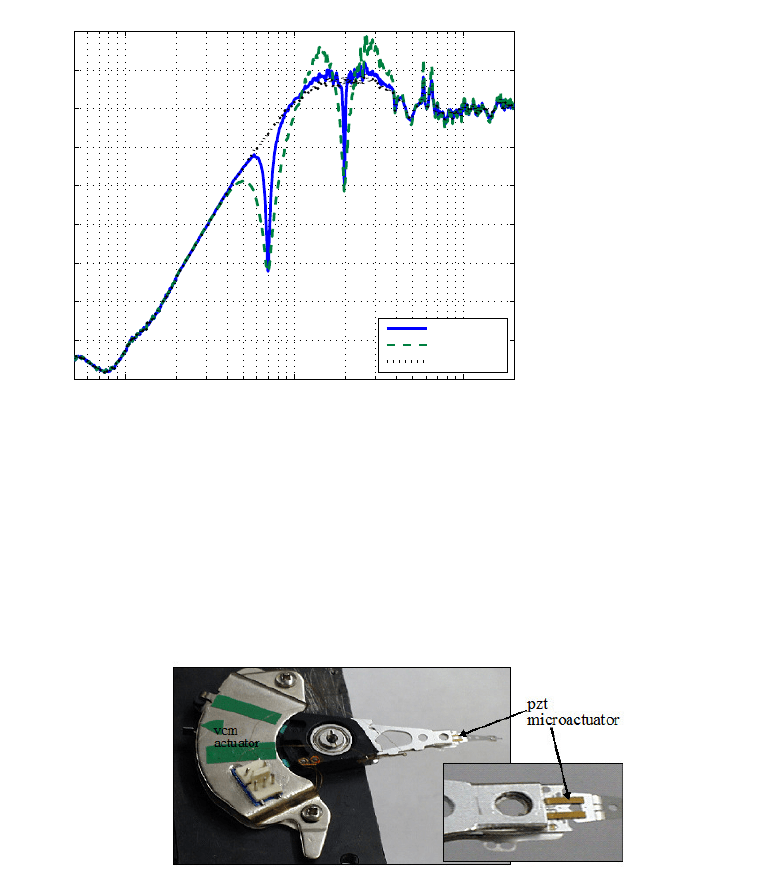
In the experiment, the dSpace 1103 on TMS320C240 DSP board was used to im-
plement the controller, and an LDV was used to measure the actuator displacement,
as shown in Figure 8.10. Channel 2 over Channel 1 of DSA is the measured fre-
quency response of the sensitivity f unction with a swept sin e signal as the reference.
Figur e 8.11 shows the experimental sensitivity functions, which agree with the sim-
ulation results in Figure 8.8. From (8.1), the σ values o f the position errors before
and after the KYP Lemma-based control versus frequencies are obtained and shown
in Figure 8.12. It can be seen that the performance with the KYP Lemma-based con-
trol is much better from 5 kHz onwards, and slightly worse before 5 k Hz, w hich is
consistent with the sensitivity functi ons in Figure 8.8.