Du C., Xie L. Modeling and Control of Vibration in Mechanical Systems
Подождите немного. Документ загружается.


154 Modeling and Control of Vibratio n in Mechanical Systems
Section 7.4.1, a “flat” sensitivity f unction is impossible. The used sampling rate for
the controller design is 40 kHz. The discrete-time actuator models are obtained using
“zero-o rder-hold” method to ensure that the designed controllers are implementable.
With ω = 2π350, ε = 10
−3.2
, ζ = 0.4 in (7.6), a V CM controller C
v
(z) is de-
signed as in Figure 7.22 using the H
∞
loop shaping method in the previous section.
Also applying the LMI approach, the controller C
m
(z) for th e microactuator is de-
signed as in Figure 7.23 with ω = 2π3700, ε = 10
−1.38
, ζ = 1, and M = 0.07
1/2
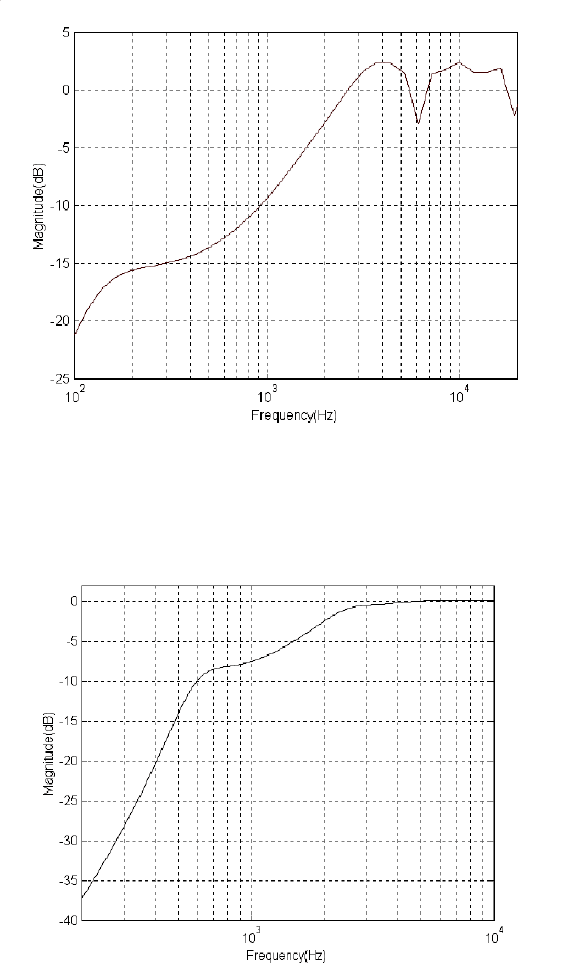
in (7.6). The sensitivity function of the dual-stage system is shown in Figu re 7.24,
where we can observe that the hump is below 3 dB. The open-loop system has the
gain margin of 8.4 dB, t he p hase margin of 64
◦
and the bandwidth of 2.49 k H z.
REMARK 7.2 If manufacturing processes could produce an ideal actu-
ator that can be modeled by a Pade-delay only, which is non-strictly proper,
it is possible to have a “flat” sensitivity like that i n Figure 7. 25 with k
g
> 0.
An actual microactuator, which resembles the ideal case, is the PZT microactuator
in [107]. It can be described by a 1-pole rol l-off model
P
m
(s) =
1257
s + 1.257 × 10
5
, (7.24)
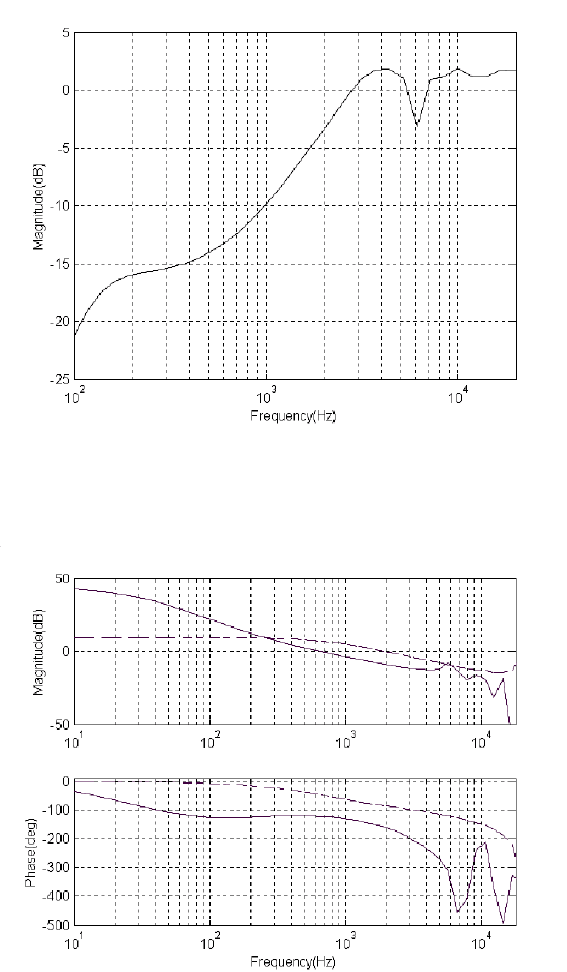
which is strictly proper and does not satisfy the necessary conditions in Section 7.3.1.
The sensitivity function with the hump lower than 2 dB, as shown as in Figure 7.26,
can be obtained with the same weighting function as that for (7 .14).
Low-Hump Sensitivity Control Design for Hard Disk Drive Systems 155
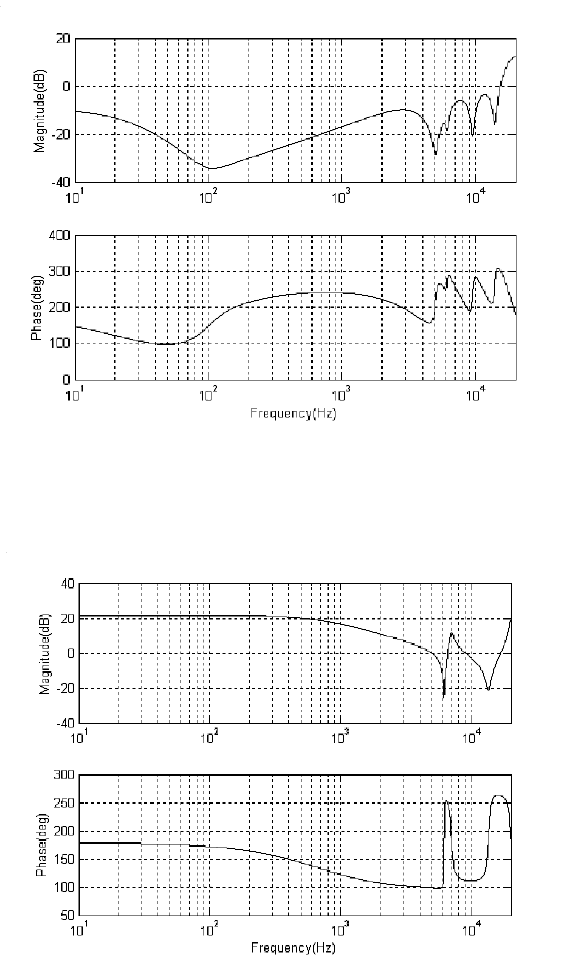
FIGURE 7.22
VCM cont roller C
v
(z).
FIGURE 7.23
Microactuator controller C
m
(z).
156 Modeling and Control of Vibratio n in Mechanical Systems
FIGURE 7.24
Sensitivity function of the dual-stage system.
FIGURE 7.25
Sensitivity function.
Low-Hump Sensitivity Control Design for Hard Disk Drive Systems 157
FIGURE 7.26
Sensitivity function of the dual-stage system.
FIGURE 7.27
Frequency responses of P
v
(z)C
v
(z) (solid curve) and P
m
(z)C
m
(z) (dashed curve).

158 Modeling and Control of Vibratio n in Mechanical Systems
7.4.3 Implementation on a hard disk drive
The experi metal setup is the same as in Figure 7.17. An LDV wi th a range of 2
µm/V is used to measure the positio n of the dual- stage actuator. Controllers are
implemented with dSpace 1103 on a TMS320C2 40 DSP board. When the dual-
stage loop is cl osed and stabilized with t he desig ned controllers, a swept sine signal
is injected at point A . A DSA is then used to measure the frequency response of
points B over A and o btain the sensitivity function.
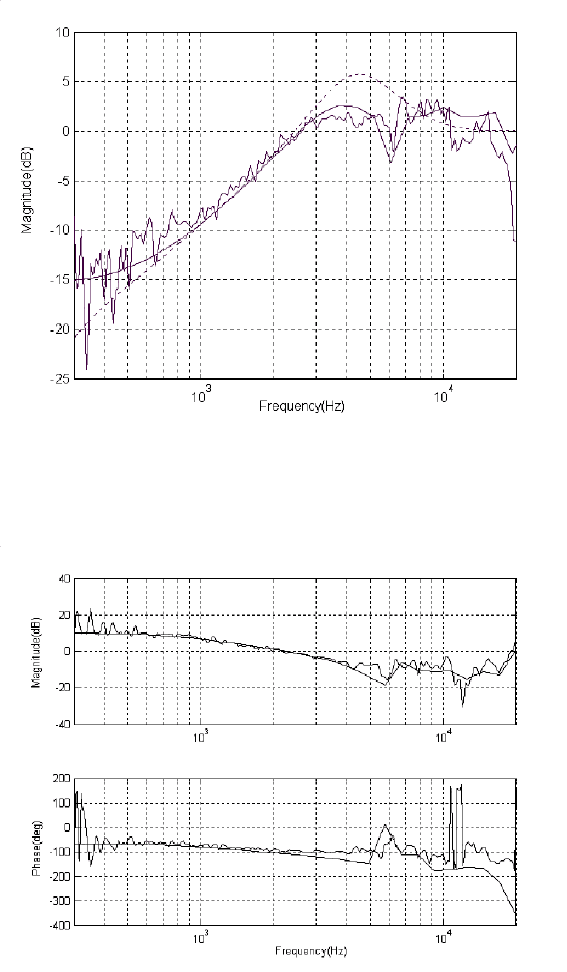
The resultant sensitivi ty functio n is shown in Figure 7.28 , where the rough line is
the testing result and th e smooth line is the simulati on result. We can observe that the
hump of the sensitivity function is lower than 3 dB, which i s better than that by a PID
design as shown by the dott ed line in Figure 7.28. The testing and simulation results
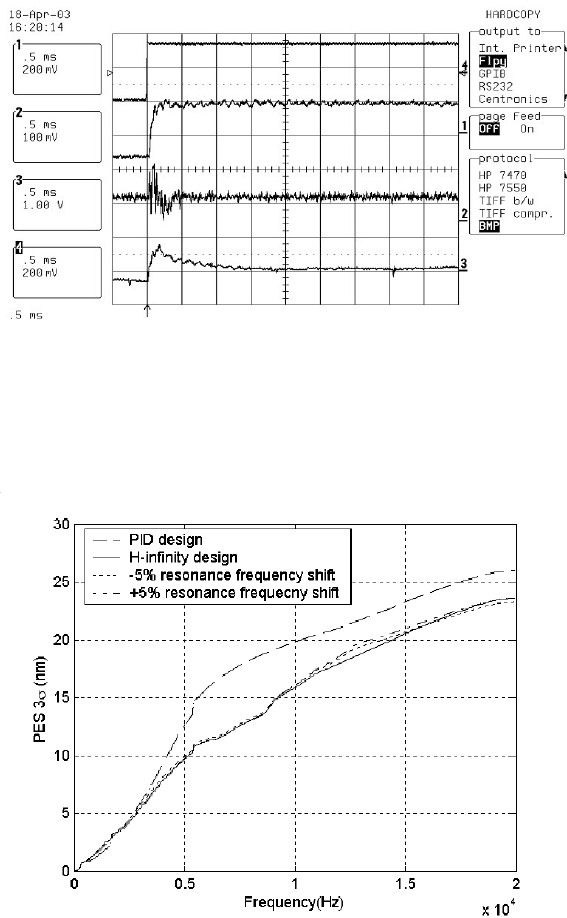
of the dual-stage open loop system are shown in Figure 7.29. The step response in
Figur e 7.30 shows that the system is stabilized and working in real time. Channel 2
in Figure 7.30 is the control signal of the VCM actuator and Channel 3 is the control
signal of the PZT mi croactuator.
The sensitivity function as in Figure 7.28 will amplify the correspon ding high-
frequency disturbances shown in Figure 7.2 du e to the h ump above 0 dB. The po-
sition error i s evaluated from ( 7.1) with the designed sensitivity functions. The 3σ
value of the position error versus frequencies is shown in Figure 7.31, wh ere we can
see that the low-hump design outperforms the PID design for disturbance rejecti on
after 2.4 kHz, which is consistent with Figure 7.28.
The proposed control design is based on the sensitivity w eighting function only
and does not consider robustn ess to plant parameter variations. This, however, will
not hamper the practical application of the resulting controllers due to the large gain
and phase margin s. The system is verified to maintain stability in spite of the vari-
ation of resonance frequency, e.g., ±5% shift of PZT resonance frequency around
13.5 kHz. The performance change with the presence of the system parameter un-
certainty is ill ustrated in Figure 7.31, where we can see that the perfor mance varies
slightly.
7.5 Conclusion
An H
∞
method has been proposed in both continuous and discrete time domains
to achieve a low-hump sensitivity function for dual-stage HDD systems using an
LMI approach. Two different microactuator models have been studied, w hich are
represented by a MEMS actuator and a PZT actuated suspension. With the proposed
selection of sensitivity weighting functions, the sensitivity function with a hump
below 3 dB has been achieved i n both simulations and experiments. Such a design
process can generate a robust servo controller with high disturbance rej ecti on in a
low frequency range, and less vibration amplification in a high frequency range, and
thus is effective in achieving hi gher positioning accuracy.
Low-Hump Sensitivity Control Design for Hard Disk Drive Systems 159
FIGURE 7.28
Sensitivity function of the dual-stage system.
FIGURE 7.29
Open loop frequency responses of the dual-stage system.
160 Modeling and Control of Vibratio n in Mechanical Systems
FIGURE 7.30
Step response of t he dual-stage system.
FIGURE 7.31
3σ value of PES NRRO versus frequency.
8
Generalized K YP Lemma-Based Loop
Shaping Control Design
8.1 Introduction
To shape frequency responses of closed-loop transfer functions such as sensitiv-
ity/complementary sensitivity functions, H
∞
optimization together with frequency
weighting is a commonly used method. The additional weight functions, however,
increase the system and controller complexity since the weighting functions usually
have to be of high orders in order to capture the desired specifications accurately.
This is especially so when a controller is to be designed, aiming at achieving a wider
bandwidth while simultaneously suppressing disturbances of particular f requencies
within or beyon d the servo bandwidth . Further, the process of choosing appropr iate
weights is tedious and time-consuming.
The KYP Lemma [61], being one of the most fundamental results in systems t he-
ory and control, establishes t he equivalence between a frequency domain inequality
(FDI) for a transfer fun ction and a linear matrix inequality associated with its stat e
space realization. I t allows us to characterize various properties of dynamic systems
in the frequency domain in terms of linear matrix inequaliti es. The standard KYP
Lemma is only applicable for the infinite frequency range, while the generalized
KYP Lemma [ 62] establishes the equivalence between a frequency domain p rop-
erty and a linear matrix inequality over a finite frequency range, allowing designers
to impose performance requirements over chosen finite or i nfinite frequency ranges.
Hence, it is very suitable f or analysis and synthesis problems in practical applications
where different specifications over different frequency ranges are usually required.
In this chapter, th e generalized KYP Lemma is applied to design a feedback con-
trol such that the specifications of the sensitivity function, required to suppress some
specific frequency disturbances, are satisfied. Unlike the standard KYP Lemma, the
matrix inequality in the generalized K Y P Lemma involves a matrix variable which is
not necessarily positive definite and thus the Schur complement cannot be appl ied to
convexi fy the controller design. To overcome this difficulty, the Youla parametriza-
tion approach is used to parameterize the closed-loop transfer functi on. The search
for the coefficients of the parameter Q(z) i s then converted t o a linear matri x in-
equality problem within the generalized KYP Lemma framework. An application of
the method in the rejection of narrowband high-frequency and mid -frequency distur-
161

162 Modeling and Control of Vibratio n in Mechanical Systems
bances is presented to demonstrate t he si mplicity of the design and th e improvement
of the positioning accuracy by the resultant controller.
8.2 Problem description
It is known that the power spectrum of the error e in Figure 2.20 is given by
S
e
= |P (z)S(z)|
2
|d
1
|
2
+ |S(z)|
2
|d
2
|
2
+ |S(z)|
2
|n|
2
(8.1)
which implies that the sensitivity function S(z) is important in determini ng the dis-
turbance rejection of a control loop. Thus, the desig n of a controller that g ives
rise to a sensitivity function which can reject specific disturbances with known fre-
quencies becomes rather significant. The purpose here is then stated as: to de-
sign a dyna mic feedback controller C(z) for plant P (z) such that the closed-loop
system is stable and for some prescribed po sitive scalars r
i
and frequency ranges
(f
i1
, f
i2
), i = 1, ..., N ,
|S(f)| < r
i
, f
i1
≤ f ≤ f
i2
(8.2)
where S(f) = 1/(1 + C(f)P (f)). Smaller r
i
means the less contribution of the
disturbance i n frequency range (f
i1
, f
i2
) to the error.
In view of the con straint stated in the Bode integral theorem, it is impossible to
achieve disturbance rejection at all frequencies higher than the bandwid th of the con-
trol loop for actuators or mi croactuators used in mechanical motion systems such as
hard di sk drives. The specification (8 .2) is consi dered for a specific frequency range,
which is however possible to be achieved through shaping the sensitivity functio n.
The above design problem may be approached by selecting a proper frequency
weighting function and carrying out an H
∞
optimization. However, the problem
of how to select a proper frequency weighting function that can give an accurate
shaping of the sensitivity funct ion is generally difficult and time-consuming. Further,
the resultant controller order wil l depend on the order of the weighting function and
the plant. Note t hat a more accurate frequency shaping usually requires a higher
order weigh ting function.
The generalized KYP Lemma [62] gives a necessary and sufficient condition for a
given transfer function to satisfy a required frequency domain property over a finite
frequency range in terms of a matrix inequality condi tion. Thus, it may be applied to
address the above design prob lem. In what follows, we employ the generalized KYP
Lemma to design a feedback control such that the sensitivity function satisfies the
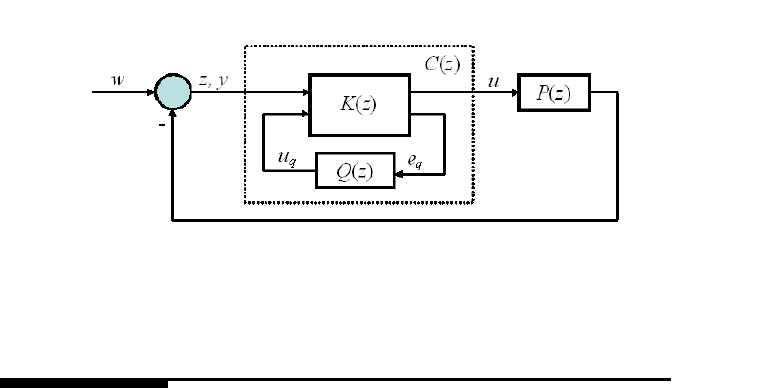
required specifications so as to reject disturbances at specific frequencies. In order
to convexify the matrix inequality, the Youla parametrization approach as shown in
Figur e 8.1 is used to design a controller with the generalized KYP Lemma.
Generalized KYP Lemma-Based Loop Shaping Control Design 163
FIGURE 8.1
Q parameterization for control design.
8.3 Generalized KYP lemma-based control design method
The pr evious analysis indicates that the sensitivity function plays a key role in distur-
bance rejection . To reject disturbance of frequency withi n a certain frequency range,
a proper shaping of the sensitivity function can be carried out. In this section, we
shall present a frequency shaping method based on the generalized KYP Lemma.
First, it is easy to see that the sensitivity function S(z) i s equal to the transfer
function from w to z in Figure 8 .1. The state-space mod el of t he plant under consid-
eration is denoted as (A
p
, B
p
, C
p
, D
p
). Then, a state-space representation of the
system in Fig ure 8.1 is given by
x(k + 1) = A
p
x(k) + B
p
u(k), (8.3)
z(k) = −C
p
x(k) + w(k) − D
p
u(k), (8.4)
where x ∈ R
n
x
is the state.
Let a state-space representation of th e controller C(z) be given by (A
c
, B
c
, C
c
,
D
c
). Assuming that D = 1 + D
c
D
p
is invertible, then a state-space representat ion
of the sensitivity function can be given by (
˜
A,
˜
B,
˜
C,
˜
D), where
˜
A =
A
p
−B
p
D
−1
D
c
C
p
B
p
D
−1
C
c
−B
c
C
p
+ B
c
D
p
D
−1
D
c
D
p
A
c
− B
c
D
p
D
−1
C
c
, (8.5)
˜
B =
B
p
D
−1
D
c
B
c
−B
c
D
p
D
−1
D
c
,
˜
C =
−C
p
+ D
p
D
−1
D
c
C
p
−D
p
D
−1
C
c
,
˜
D = 1 − D
p
D
−1
D
c
. (8.6)
A special case of the generalized KYP Lemma that r elat es the bounded realness of
the sensitivity function over finite frequency ranges to its st ate space representation
is given b elow.