Czichos H., Saito T., Smith L.E. (Eds.) Handbook of Metrology and Testing
Подождите немного. Документ загружается.

978 Part E Modeling and Simulation Methods
10
0
10
–1
10
–2
10
–3
10
–4
10
–5
10
–6
10
–7
10
–8
10
–9
10
–10
10
–11
10
–12
10
–13
0.001 0.01 0.1
MD time step Δt
Deviation from exact solution
Verlet
k = 2.00
4
th
Gear
k = 3.99
5
th
Gear
k = 4.97
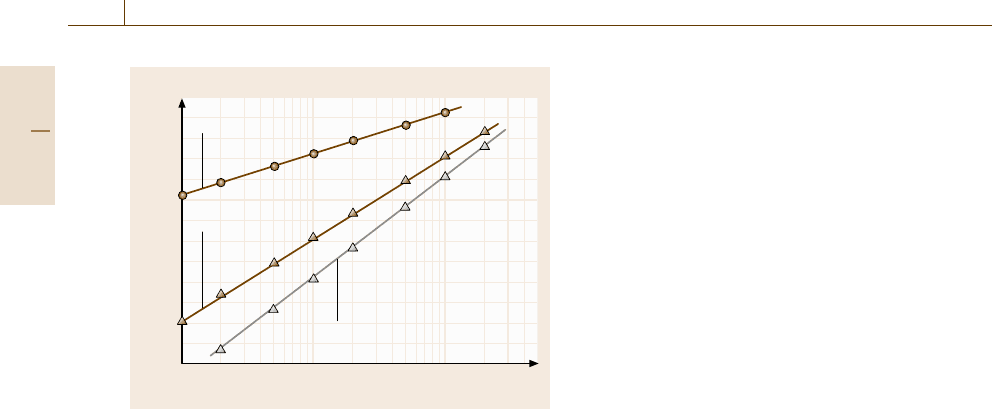
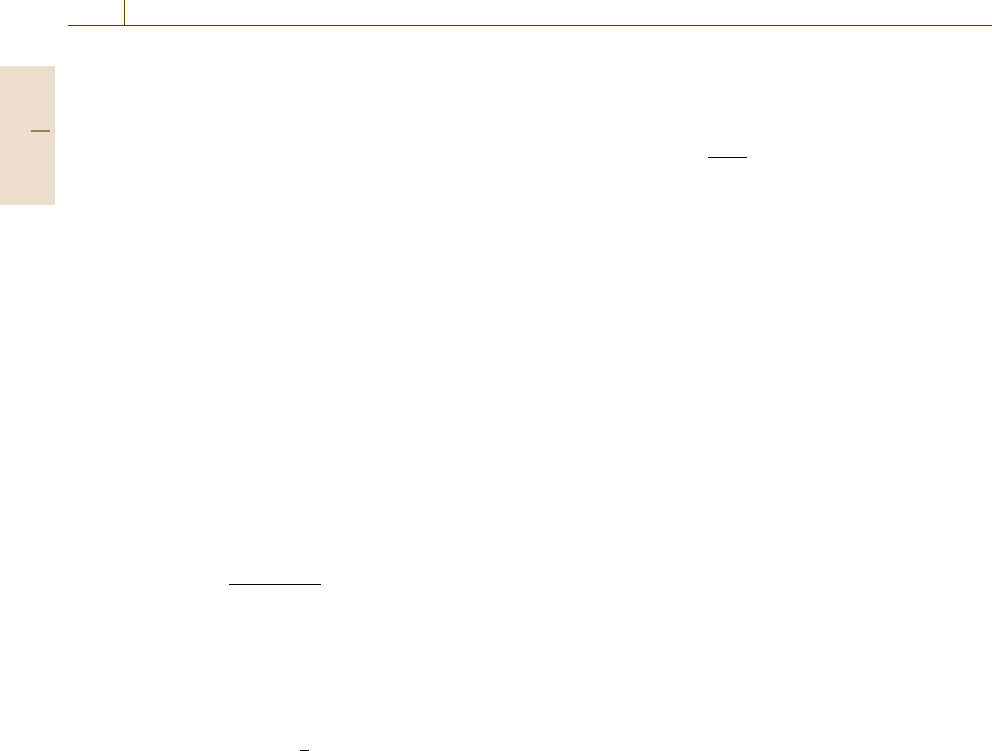
Fig. 17.2 The relation between the deviation in particle tra-
jectory from the exact solution of the harmonic oscillator
after 100 cycles and the calculation time step Δt.The
slope k of the linear approximation of each set of plots is
also depicted
the system considered. However, in the case of the
simulation of complex systems of many atoms, nu-
merical errors might also originate from other factors
such as an artificial cutoff of the interactions or com-
puter roundoff errors in the numerical treatment. So,
we cannot definitely conclude that the higher-order
Gear methods are superior to the Verlet method. In
some practical simulations of a small protein [17.3],
the Verlet method does show more accurate energy
conservation than the higher-order (fourth to eighth)
Gear methods for a considerably large time step, al-
though the calculation time is shorter and the consumed
memory space is lower for the Verlet methods. In
a practical sense, we should choose these numer-
ical methods depending on available computational
resources such as calculation speed and memory
storage.
Program Languages
and Computational Platforms
To end this section, we consider the program languages
in which the calculation code is written and the plat-
forms on which the MD calculations are performed.
The program that executes MD calculations on com-
puters are usually written in particular languages. The
FORTRAN language is one of the most popular due to
its historical use for supercomputers. Of course, other
program languages such as the C or JAVA are also good
for the coding MD programs.
In terms of the platform for the simulation, any
type of computer, for example supercomputers, work-
stations, personal computers (PCs), or others, can be
used for MD simulations. Any type of operating sys-
tem, such as UNIX, Windows, Macintosh, or Linux,
will work, as long as it supports the language used.
In particular, since the main part of the MD calcula-
tions consists of the computation of forces acting on
each particle, which can be calculated independently,
the use of computers with vector or parallel proces-
sors makes the calculation highly efficient. In addition,
the computing power of modern personal computers
is sufficient to perform MD simulations at a satisfac-
tory speed. Examples of typical calculation time of
MD simulations on a PC will appear in the following
section.
17.1.2 Constraints
on the Simulation Systems
MD simulation is inevitably restricted by computational
power. Therefore, in this section, we shall introduce two
remedies for this deficiency: periodic boundary condi-
tions and the bookkeeping method.
Since the typical time scale for atomic motions
is of the order of a picosecond (10
−12
) or less, we
should use values of the order of a femtosecond
(10
−15
) for the time step Δt to keep the numeric-
al errors small. Therefore, it takes many more than
a million iterations to follow the motion of a single
atom for just a microsecond. Moreover, the number
of calculations required grows rapidly as the num-
berofatomsN in the system increases. Under these
circumstances, we should satisfy ourselves with the
calculation of a small system with fewer than a mil-
lion atoms and a short physical process over less than
a few microseconds. Thus there is always a large dis-
crepancy in both length and time scale between the
real macroscopic system and the simulation system we
can handle. For example, the typical size of a million-
atom system is as small as a few tens of nanometers,
which means that the simulation system is far from
macroscopic.
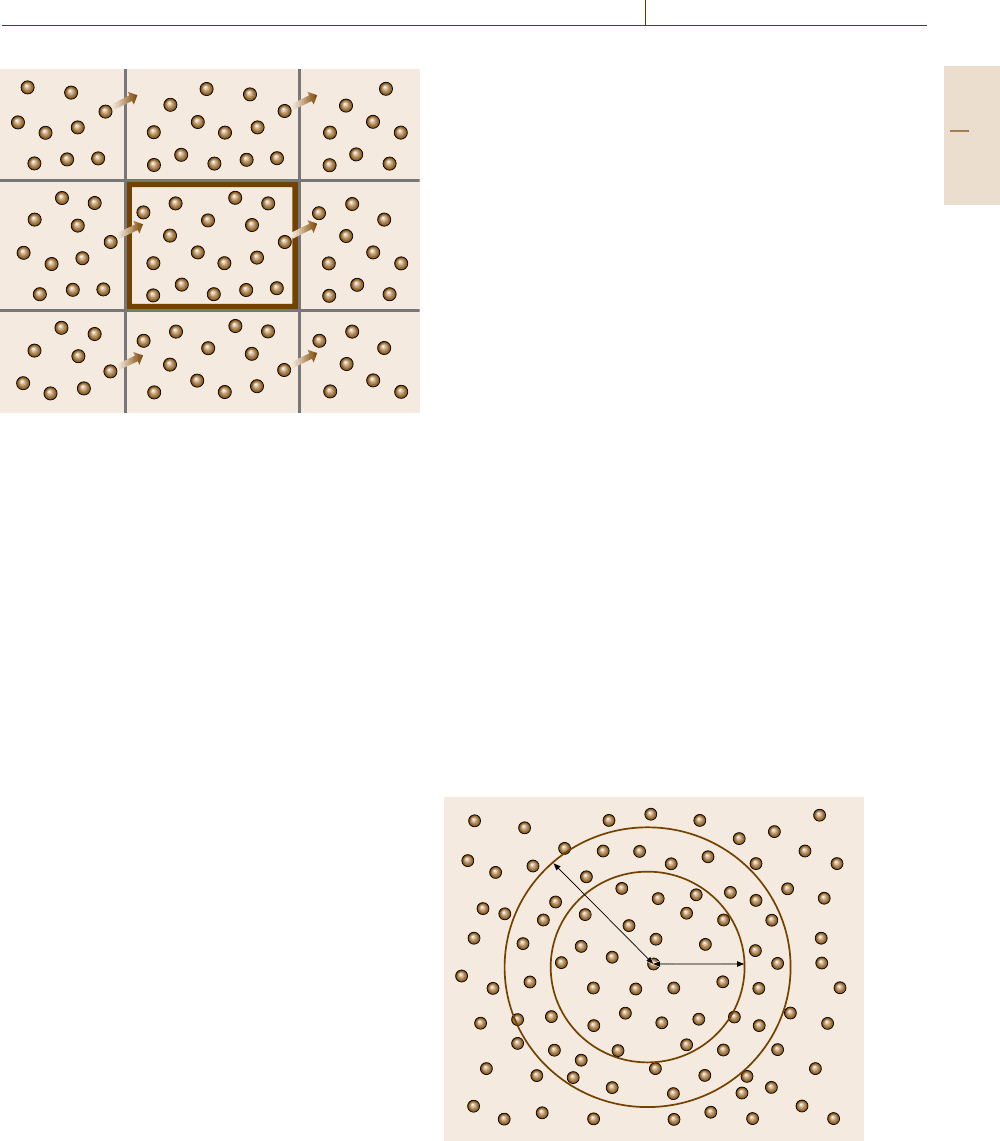
Periodic Boundary Condition
A popular remedy for the length scale problem is the use
of periodic boundary conditions. As shown schemati-
cally in Fig. 17.3, we first confine all the atoms to a box,
and then copy the box, together with the atoms in the
box, identically in three directions. By repeating this
procedure, we can fill the whole space with the original
Part E 17.1
Molecular Dynamics 17.1 Basic Idea of Molecular Dynamics 979
Fig. 17.3 An illustrative view of periodic boundary condi-
tions
configuration and its replicas. Consequently, an atom
leaving the box to the right through one boundary can be
identified with an atom entering from the left at the op-
posite boundary. A system constructed in this way can
be taken as having infinite size and an infinite number
of atoms.
Of course the periodic system cannot be identical to
an infinitely large bulk system. Some drawbacks caused
by periodic boundary conditions will be discussed in
later sections.
Bookkeeping Method
The main part of the calculational cost in solving
the equations of motion is due to the calculation of
the interactive forces between atoms, because, roughly
speaking, the number of combinations of interacting
atomic pairs grows as N
2
or faster with the total num-
ber of atoms N. If the atomic force has a long-range
interaction range, such as the Coulomb interaction,
this problem is very serious, and the complicated
Ewald method [17.4] is needed to perform calculations
effectively. On the other hand, if the interaction is short-
range, which is the case for most metallic systems,
a simple prescription called the bookkeeping method
effectively saves us a lot of calculation time.
The bookkeeping concept is simple: we keep
a book, in which a table of the neighboring atoms is
written down for all atoms in the system, and is reg-
ularly updated with a proper period ΔtN
book
.More
concretely, we first calculate the members within a dis-
tance r
book
=r
c
+r
margin
of each atom, where r
c
is the
interaction range, and write them down in the book,
as illustrated schematically in Fig. 17.4. Then we need
only consider interactions between the atom and its
neighbors, as written in the book, in the following N
book
numerical integration steps. After every N
book
integra-
tion steps, we update the list of neighbors in the book
by calculating the distances between all atomic pairs.
The period N
book
for updating the book should be de-
termined according to N
book
vΔt =r
margin
, where v is
the average velocity of the atoms.
As previously mentioned, the calculation time re-
quired for the force calculation grows like N
2
in
a pairwise-interacting system, if we calculate the inter-
action for all pairs of atoms. On the other hand, when
we use the bookkeeping method, the time required only
grows linearly with N, because the average number of
atoms neighboring each particle is almost constant and
does not depend on N.
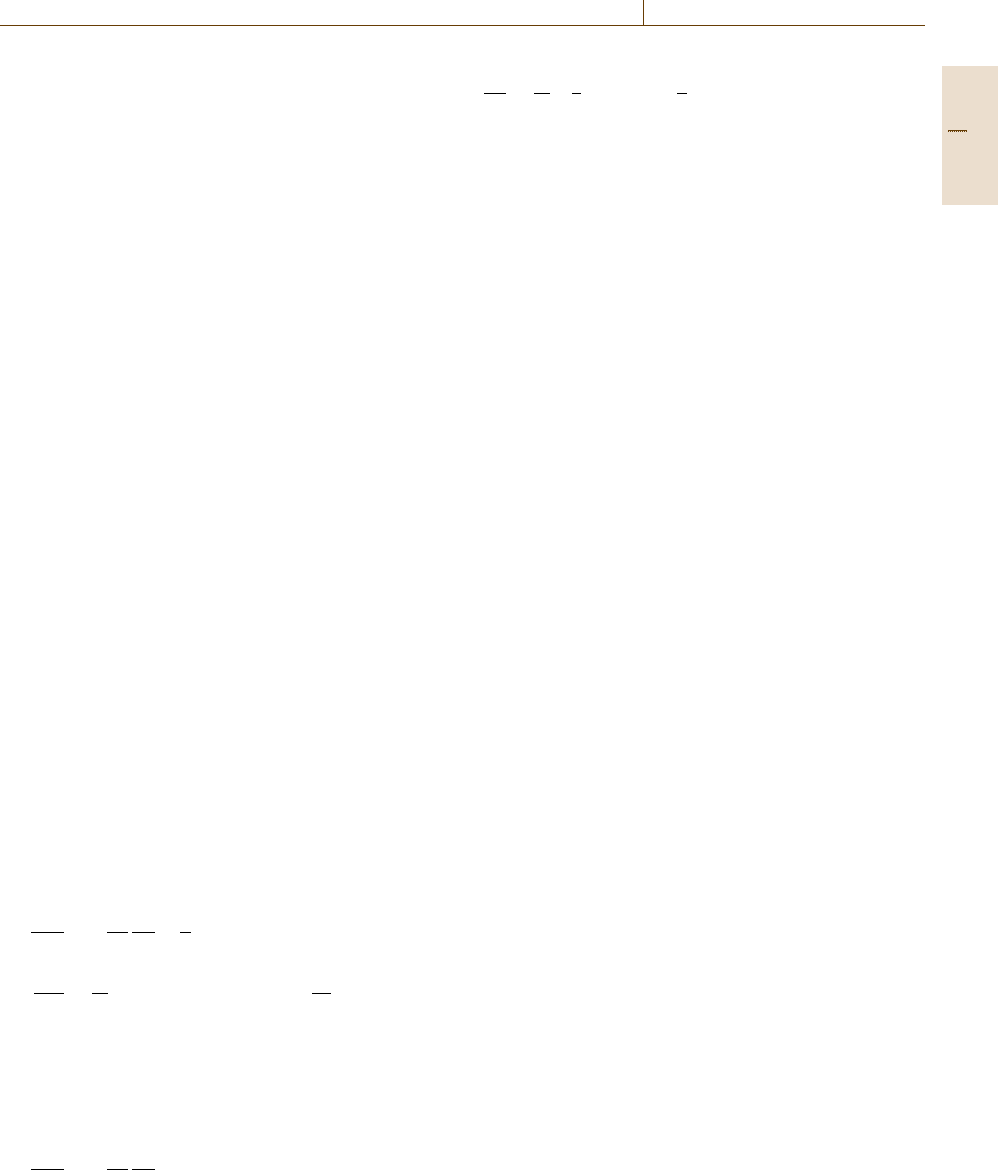
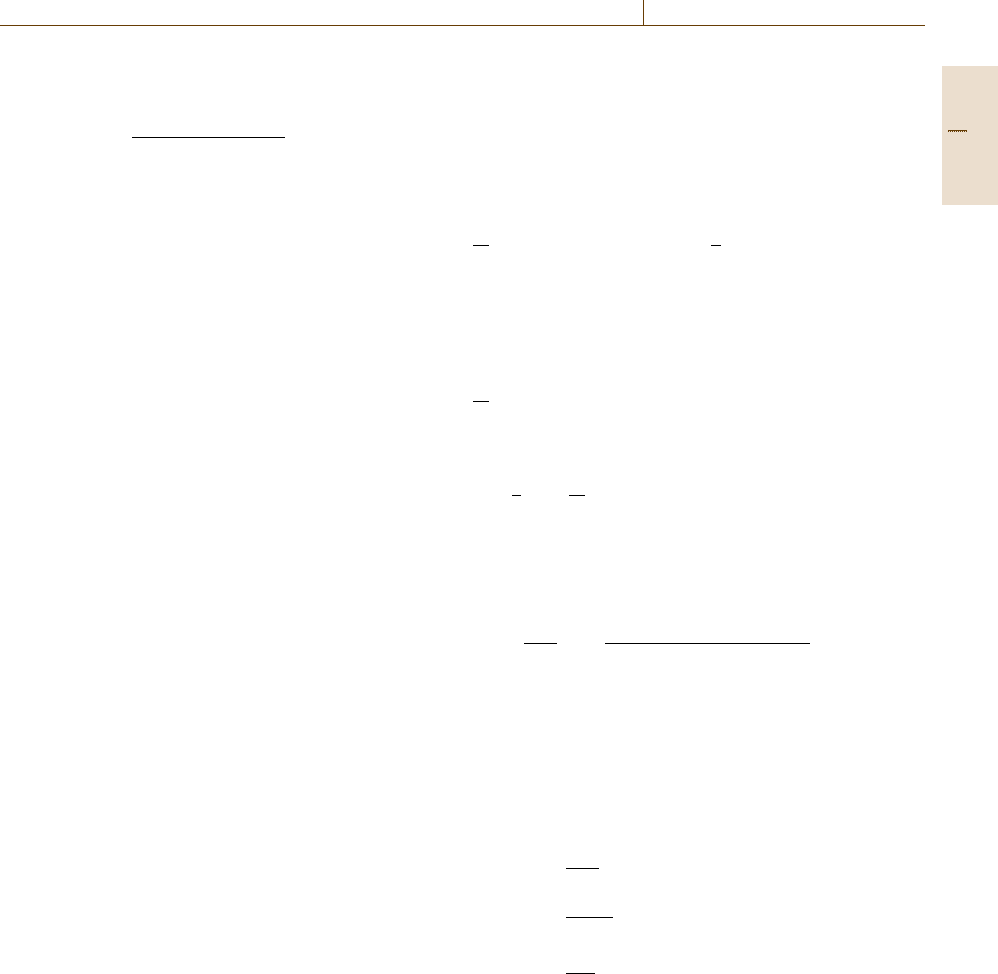
Figure 17.5 shows the relation between the cal-
culation time needed for 100 integration steps and
the total number of atoms N in a simulation cell.
In this calculation, we choose a system consisting of
pairwise-interacting atoms and use r
book
= 1.32r
c
and
N
book
= 50. The calculation program was coded in
the FORTRAN language and executed on a PC with
a single processor. In Fig. 17.5,wehaveshownthe
slope k of the linear approximation to each data set in
log–log plots. Note that the calculation time for the sim-
ulation with bookkeeping scales almost linearly, while
that of the simulation without bookkeeping scales al-
most quadratically, which leads to a d ifference of nearly
a thousand times in the calculation time for N = 20 000
atoms.
r
book
r
c
Fig. 17.4 An illustrative view of the regions related with
the bookkeeping method
Part E 17.1
980 Part E Modeling and Simulation Methods
10
4
10
3
10
2
10
1
10
0
10
–1
10
–2
10
–3
10 100 1000 10 000 100 000
Calculation time (s)
N
No bookkeeping
k = 1.85
Bookkeeping
k = 1.20
Fig. 17.5 The relation between the calculation time for 100
MD steps and the total number N of atoms in the simula-
tion system with and without bookkeeping
17.1.3 Control of Temperature and Pressure
To compare the simulation results with experimental
results, we must control the thermodynamical condi-
tions such as the temperature and the pressure of the
simulation system. The techniques for controlling the
temperature and the pressure of the simulation system
will be introduced in this section: the momentum-
scaling method and the Nose–Hoover thermostat for
temperature control, and the Andersen and Parrinello–
Rahman methods for pressure control.
Before introducing the control methods, we note
that the use of the control methods discussed below in-
cludes a subtle point; the standard way of temperature or
pressure control for the simulation system lies outside
the description of the Newtonian equations of motion.
Consequently, the deterministic nature of the MD simu-
lation will be lost and there is a risk that the simulation
results might depend on the control method we use.
Therefore, care should be taken when using such control
methods in MD simulations.
Momentum-Scaling Method
To control the temperature of the simulation system,
several methods have been presented. One of the sim-
plest methods is the momentum-scaling method [17.5,
6]. The temperature T of the system is defined by the
average kinetic energy of all the atoms as
3
2
k
B
T =
1
2
i
m
i
v
2
i
, (17.17)
where k
B
is the Boltzmann constant. Accordingly, when
we want the system temperature to be T
0
, we rescale the
kinetic momenta of all atoms by a factor of
√
T
0
/T.
By executing this rescaling procedure repeatedly,
the system temperature will approach the desired
temperature. Even though this method appears too
naive and basic, it has been verified [17.7] that the
thermodynamical quantities will approach their equilib-
rium values after iterated equilibration processes using
momentum rescaling if the number of atoms N is suffi-
ciently large.
One of advantages of this method is that the cod-
ing procedure is simple. For example, supposed that
the rescaling of the momenta is to be carried out
every N
rescale
steps, we would calculate the tempera-
ture T of the system according to (17.17), and insert
the momentum-scaling transformation for all atoms as
p
i
→
T
0
/T p
i
, (17.18)
after every N
rescale
integration steps.
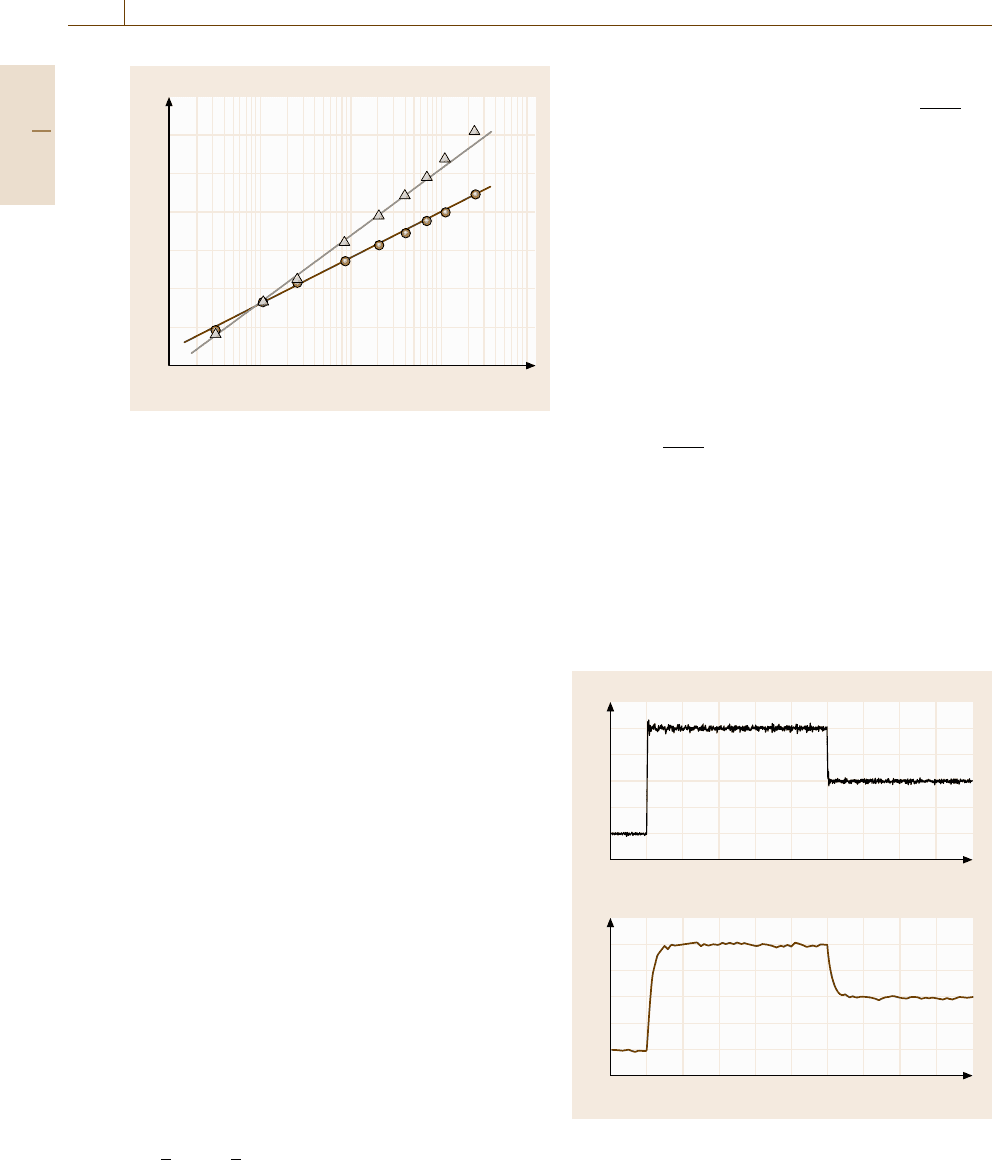
In Fig. 17.6, we have depicted two examples of
the time evolution of the system temperature T in
a simulation in which the temperature is controlled
by the momentum-scaling method. Starting from an
equilibrated state at T =200 K, we have changed the
temperature to 400 K at t = 1000 steps, and then to
450
400
350
300
250
200
150
0 2000 4000 6000 8000 10 000
400
350
300
250
200
150
0 2000 4000 6000 8000 10 000
T (K)
T (K)
MD steps
MD steps
N
rescale
= 10
N
rescale
= 100
Fig. 17.6 Time evolution of the effective temperature T
of the simulation system calculated from the total kinetic
energy of the atoms
Part E 17.1
Molecular Dynamics 17.1 Basic Idea of Molecular Dynamics 981
300 K at t = 6000 steps. The upper graph shows the
case with N
rescale
=10, while the lower graph shows the
case with N
rescale
=100, where the convergence to the
desired temperature is slower. In both cases, the tem-
perature of the system is well controlled to the desired
value except for accompanying small fluctuations.
Stochastic Method
There is another temperature-control method called the
stochastic method [17.8]. In this method, we pick an
atom at random and exchange its velocity with a value
taken at random from a Maxwell–Boltzmann distribu-
tion with the desired temperature T
0
. By executing this
prescription repeatedly every N
exch
steps, the system
should approach thermal equilibrium. However, it is dif-
ficult to determine a proper value for the interval N
exch
.
An interval that is too short will generate a jiggling
behavior of atoms within a small configuration space,
while an interval that is too long will result in a very
long calculation time to obtain the thermal equilibra-
tion at the desired temperature. In addition, there is
another shortcoming to the stochastic method, which
might bring about an unwanted steady state in the sim-
ulation system. Therefore, one should consult [17.9]if
using this method.
Nose–Hoover Thermostat
In contrast to the stochastic nature of the previous
method, there is a sophisticated temperature-control
method with a deterministic nature, called the Nose–
Hoover thermostat method [17.10, 11]. In this method,
a fictitious variable S, which plays the role of a tem-
perature controller, is introduced into the mechanics of
the simulation system. The variable S serves as a sort
of friction of atoms, and its value depends on the differ-
ence between the system temperature T and the desired
temperature T
0
. The equations of motion of the ex-
tended system are the following
d
2
r
i
dt
2
=−
1
m
i
∂φ
∂r
i
−
˙
S
S
v
i
, (17.19)
d
2
S
dt
2
=
S
Q
i
m
i
v
2
i
−3Nk
B
T
0
+
˙
S
2
S
, (17.20)
where Q is the fictitious mass of the variable S. The
dotted symbols denote their time derivatives.
The role of the variable S can be seen more clearly
if we introduce a variable ς =
˙
S/S and rewrite (17.19)
and (17.20)as
d
2
r
i
dt
2
=−
1
m
i
∂φ
∂r
i
−ςv
i
, (17.21)
dς
dt
=
2
Q
1
2
i
m
i
v
2
i
−
3
2
Nk
B
T
0
. (17.22)
We can see that the second term on the right-hand
side of (17.21), which is proportional to atom velocities,
serves as a sort of friction term, whose value depends
on the difference between the system temperature T
and the desired temperature T
0
. It has also been ver-
ified [17.7] that this extended system gives the same
partition function as that of the original system in the
thermal equilibrium limit.
If we consider the fictitious variable S as the co-
ordinate of an additional atom, which has a peculiar
equation of motion (17.20), then a coding procedure can
be executed similarly. However, since (17.19–17.22)
contain velocity dependent terms, a simple leap-frog
method does not work straightforwardly. In this case,
use of a predictor–corrector method is appropriate. For
example, using the Gear method, the coding procedure
is the following: (Here we shall use one dimen-
sional expression x
i
(t) for the atom coordinates for
simplicity.)
Step 1 For the p-th order method, specify the initial po-
sition x
i
(t
0
) and its derivatives x
i
(t
0
), x
i
(t
0
),...,
and x
(p−1)
i
(t
0
) and assign them to q
i
(t
0
)fori =1
to N.
Step 2 Consider S(t) as coordinates of the (N +1)-
th atom, specify the initial value for S(t
0
)and
its derivatives S
(t
0
), S
(t
0
),...,and S
(p−1)
(t
0
),
and assign them to q
N+1
(t
0
).
Step 3 Calculate the predicted coordinates
˜
q
i
(t
0
+Δt)
for i = 1toN +1 at the first step according to
(17.11).
Step 4 Calculate the force F
i
(t
0
+Δt) at the first step
for i = 1toN according to (17.19) by using
˜
q
i
(t
0
+Δt).
Step 5 Calculate the force F
N+1
(t
0
+Δt)atthefirst
step according to (17.20) by using
˜
q
i
(t
0
+Δt).
Step 6 Compute the corrected q(t
0
+Δt) according to
(17.12)fori = 1toN +1.
Step 7 Repeat steps 3 to 6 with t
0
→t
0
+Δt.
Here one point should be noted about the meth-
ods in which fictitious variables are introduced, such as
the Nose–Hoover thermostat. Once the motion of the
fictitious variables has settled down, the fictitious vari-
able does not harm the simulation system. On the other
hand, for example, if we try to increase the system tem-
perature by a large amount, the value of the fictitious
variable starts to change very rapidly, so the tempera-
ture of the system will rise to the target value. However,
Part E 17.1
982 Part E Modeling and Simulation Methods
when the system temperature reaches the desired value,
the motion of the fictitious variables goes on due to their
inertia, which results in the temperature continuing to
rise until the motion of the variable stops. This type of
overshooting behavior is an inevitably result of meth-
ods with fictitious variables. We shall see an example of
such undesirable behavior in the case of pressure control
in the following.
Boundary Box Scaling
If the simulation system has a fixed boundary, we cannot
control the pressure of the system. Therefore, pressure
control methods are always accompanied by changes of
the boundary conditions. Suppose that the simulation
system is contained in a boundary box of volume V,the
internal pressure of the system can be calculated using
the virial formula
P
int
αβ
=
1
3V
i
m
i
v
iα
v
iβ
−q
iα
∂φ/∂q
iβ
, (17.23)
where the Greek symbols take the Cartesian values
1, 2, or 3. So a simple method is to enlarge the size of
the simulation cell if we want to decrease the pressure,
and vice versa. In more concrete words, if the bound-
ary box has a pallerelpiped shape spanned by the three
vectors (abc) =h, where h
αβ
is a 3 × 3 tensor, we can
control the pressure P
int
of the system by varying the
cell shape according to
h
αβ
→h
αβ
1−ε
P
0αβ
−P
int
αβ
, (17.24)
where P
0
is the desired pressure and ε is an appro-
priate small parameter. This method is similar to the
momentum-scaling method in some sense.
Andersen Method
As in the case of temperature control, there are some
more sophisticated methods for the pressure control in
which a fictitious variable is introduced in order to con-
trol the system pressure. In this case, the simulation cell
itself is taken as a fictitious dynamical variable just like
the Nose–Hoover thermostat S. The total Lagrangian L
is defined as
L = L
0
+L
cell
, (17.25)
L
0
=
1
2
i
m
i
v
2
i
−φ(r
1
, r
2
,...) , (17.26)
L
cell
= K
cell
−P
ext
V , (17.27)
where K
cell
is the kinetic term of the simulation cell,
which depends on the method, P
ext
is the external
stress, and V =det h is the cell volume.
Several forms of K
cell
have been proposed. In
Andersen’s scheme [17.8], the shape of the cell is
restricted to be cubic, that is, h
αβ
= V
1/3
δ
αβ
. The dy-
namics are described by
K
A
cell
=
1
2
M
˙
V
2
, (17.28)
where the dotted variables denote their time derivatives
and M is the effective mass of the cubic cell. In this
case, the equations of motion are the followings
dr
i
/dt = p
i
/m
i
+
1
3
V
−1
˙
Vr
i
, (17.29)
dp
i
/dt =−∂φ/∂r
i
−
1
3
V
−1
˙
V p
i
, (17.30)
d
2
V/ dt
2
=
1
M
1
3V
i
m
i
p
2
i
−r
i
·∂φ/∂r
i
−P
ext
, (17.31)
where the third equation means that the cell motion is
triggered by the deviation of the internal stress from the
external stress.
By introducing scaled coordinates s
i
parameterized
as r
i
= Ls
i
by the edge length L = V
1/3
of the cubic
cell, (17.29–17.31) can be rewritten as
d
2
s
i
/dt
2
=−
L
−1
m
i
∂φ/∂r
i
−2L
−1
˙
L
˙
s
i
, (17.32)
d
2
L/ dt
2
=
L
−2
3M
1
3V
i
m
i
(L
˙
s
i
)
2
−r
i
·∂φ/∂r
i
−P
ext
−2L
−1
˙
L
2
. (17.33)
These expressions are more easy to handle for coding in
many cases.
Parrinello–Rahman Method
In the Parrinello–Rahman method [17.12], which is
a generalization of Andersen’s method, the shape of the
simulation cell is allowed to deform more flexibly. The
periodic box has a pallerelpiped shape spanned by the
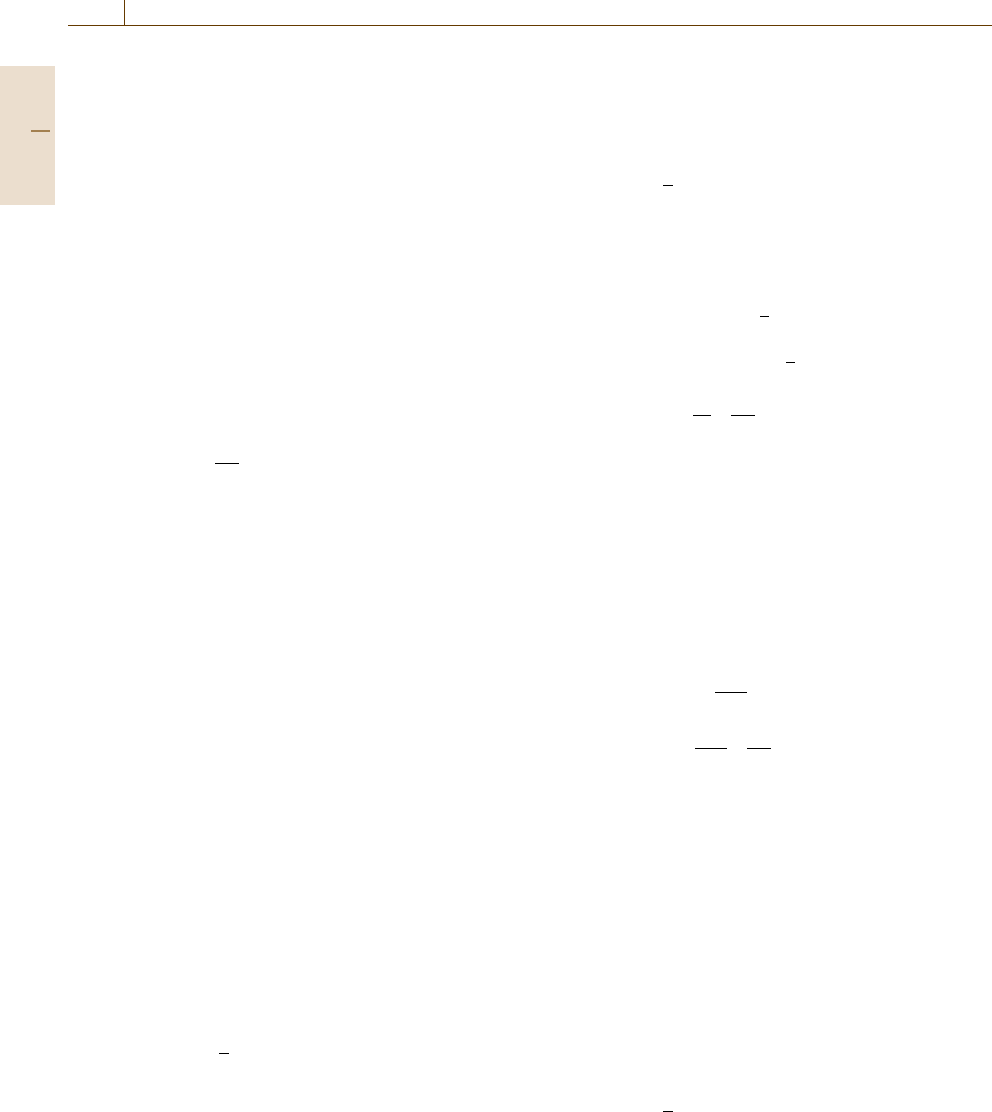
three vectors (abc) =h, as shown in Fig. 17.7. The
kinetic part is written as
K
PR
cell
=
1
2
Mtr
t
˙
h
˙
h
,
(17.34)
where
t
h denotes the transpose of h and the dotted vari-
ables denote their time derivatives again. The equations
Part E 17.1
Molecular Dynamics 17.1 Basic Idea of Molecular Dynamics 983
V
c
b
a
V'
c'
b'
a'
Andersen
Parrinello–Rahman
Fig. 17.7 Illustrative images of a deformation of the
periodic boundary cell in the Andersen and the Parrinello–
Rahman scheme
of motion can then be written down by using scaled co-
ordinates s
i
parameterized as r
i
= hs
i
in the following
forms
ds
i
/dt =h
−1
p
i
/m
i
, (17.35)
dp
i
/dt =−∂φ/∂r
i
−
t
h
−1t
˙
h p
i
, (17.36)
d
2
h/ dt
2
=
V
M
Π −P
ext
t
h
−1
, (17.37)
where
Π −P
ext
αβ
=
1
V
i
m
i
(h
˙
s
i
)
α
(h
˙
s
i
)
β
−r
iα
∂φ/∂r
iβ
−P
ext
αβ
(17.38)
is the deviation of the internal from the external stress
tensor.
As schematically illustrated in Fig. 17.7, the dynam-
ical variable fictitiously introduced into the simulation
system is the volume V in the Andersen method,
while its counterpart is the shape tensor h in the
Parrinello–Rahman method; in both of these methods
the periodic simulation cell can change its shape ac-
cording to the dynamical variable V or h. In both
Andersen’s method and the Parrinello–Rahman method,
the coding procedure is carried out by taking the fic-
titious parameters V or h as additional atoms just
like in the Nose–Hoover thermostat method. In ad-
dition, since (17.29–17.33)and(17.35–17.38) contain
velocity-dependent terms, use of a predictor–corrector
method is appropriate. For example, to code the An-
dersen’s constant-pressure method by using the Gear
algorithm, the outline is the following: (Here we shall
also use one-dimensional expression x
i
(t) for the atom
coordinates and s
i
(t) = L(t)
−1
x
i
(t) for the scaled coor-
dinates for simplicity.)
Step 1 For the p-th order method, specify the ini-
tial (scaled) position s
i
(t
0
) and its derivatives
s
i
(t
0
), s
i
(t
0
),..., and s
(p−1)
i
(t
0
) and assign
them to q
i
(t
0
)fori = 1toN.
Step 2 Consider L(t)(orV(t)) as coordinates of the
(N +1)-th atom, specify the initial value for
L(t
0
)(orV (t
0
)) and its derivatives, and assign
to q
N+1
(t
0
).
Step 3 Calculate the predicted coordinates
˜
q
i
(t
0
+Δt)
for i = 1toN +1 at the first step according to
(17.11).
Step 4 Calculate the force F
i
(t
0
+Δt) at the first step
for i = 1toN according to (17.32) by using
˜
q
i
(t
0
+Δt).
Step 5 Calculate the force F
N+1
(t
0
+Δt)atthefirst
step according to (17.33) by using
˜
q
i
(t
0
+Δt).
Step 6 Compute the corrected q
i
(t
0
+Δt) according to
(17.12)fori = 1toN +1.
Step 7 Repeat step 3 to 6 with t
0
→t
0
+Δt.
As noted above, there is a risk that the fictitious
variables introduced to control temperature or pressure
might harm the real dynamics of the atoms. In this re-
gard, we shall see how the fictitious variables control the
system pressure in the constant-pressure formalism. In
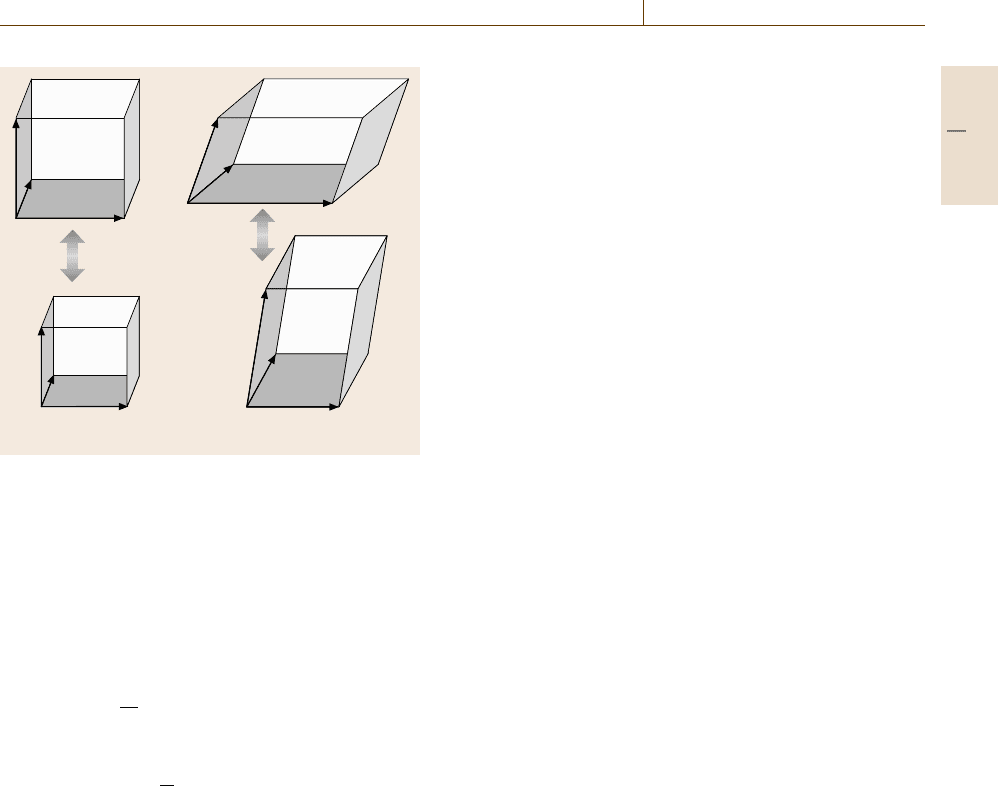
Fig. 17.8, an example of the time evolution of the inter-
nal pressure P =
P
int
11
+P
int
22
+P
int
33
/3 of a simulation
system is shown. The system consists of 4000 atoms
with face-centered cubic (fcc) structure interacting via
a Lennard-Jones potential, which will be explained in
the following section. By using the Parrinello–Rahman
method, the external pressure is changed from 0 to
1GPa at MD time step =2000. Overshooting behav-
ior is found just after the moment at which the pressure
is changed until the pressure settles down around the de-
sired value. This overshooting deviation reaches nearly
1 GPa. A similar behavior could be also found in the
time evolution of the temperature for the Nose–Hoover
thermostat method.
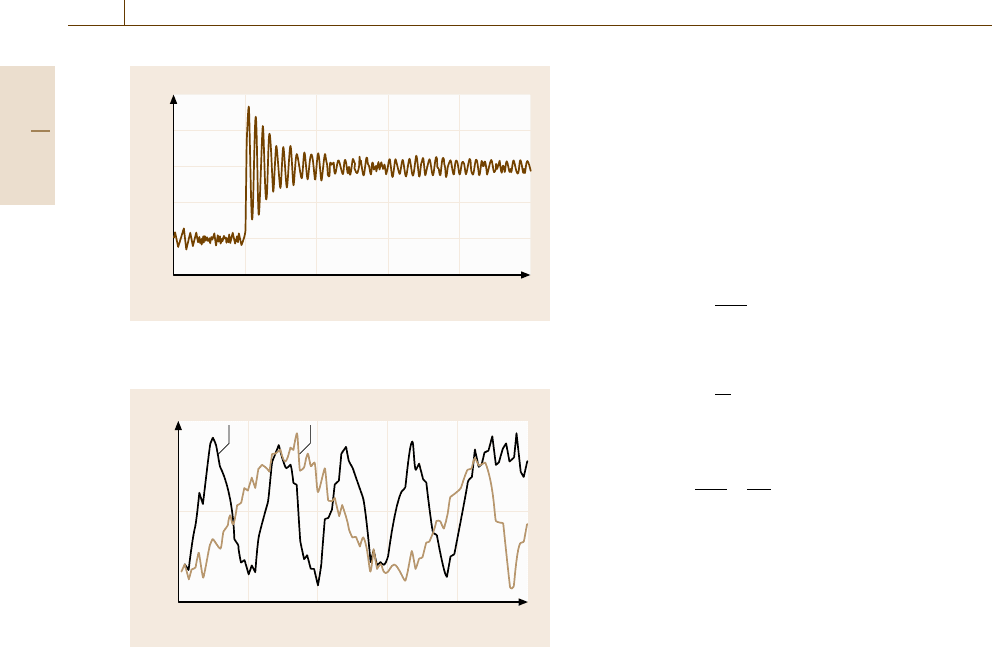
Even after the internal pressure has come to its
equilibrium value there remains a small fluctuation
of the pressure due to the thermal motion of the
simulation cell, as found in Fig. 17.8. This type of
breathing behavior inevitably exists in formulations
using fictitious variables, and its properties strongly
Part E 17.1
984 Part E Modeling and Simulation Methods
2
1.5
1
0.5
0
–0.5
0 2000
4000
6000 8000 10 000
P (GPa)
MD steps
Fig. 17.8 Time evolution of the internal pressure P of the
simulation system
0.05
0
–0.05
MD steps
0 200 400 600 800 1000
P (GPa)
M=M* M=10 M*
Fig. 17.9 Breathing behavior of the internal pressure P of
the simulation system
depend on the mass of the fictitious variable. For
the same simulation system as shown in Fig. 17.8,
we can calculate the breathing behavior of the inter-
nal pressure P due to the thermal fluctuation in the
cases of different two masses M
∗
and 10M
∗
of the
Parrinello–Rahman cell. (The mass M
∗
will be de-
fined soon.) The results are shown in Fig. 17.9,
where we can see the frequency of the breathing
strongly depends on the mass M of the simulation
cell.
In general, a large mass gives a small overshoot but
a slow convergence, while a small mass gives a large
overshoot but a rapid convergence. In any case, the
dynamics of the atoms in the simulation is inevitably af-
fected by the motion of the fictitious variables [17.13].
In this context, Parrinello suggested [17.14] that the
mass of the simulation cell should be determined such
that the periods of the MD cell oscillation and that
of sound waves are of the same order. The suggested
value is M
∗
=3
m
i
/4π
2
, where m
i
are the atom
masses.
NPT Ensemble
By combining the temperature-control and pressure-
control methods, we can perform the simulation of
an NPT ensemble, which is most appropriate for
comparison with experimental results under ordinary
conditions. For example, if we take the Nose–Hoover
thermostat method for temperature control and the An-
dersen method for pressure control, the equation of
motions of the total system are the following
d
2
s
i
/dt
2
=−
L
−1
m
i
∂φ/∂r
i
−
S
−1
˙
S +2L
−1
˙
L
˙
s
i
,
(17.39)
d
2
S/dt
2
=−
S
Q
i
m
i
(L
˙
s
i
)
2
−3Nk
B
T
0
+S
−1
˙
S
2
, (17.40)
d
2
L/ dt
2
=
L
−2
3M
1
3V
i
m
i
(L
˙
s
i
)
2
−r
i
·∂φ/∂r
i
−P
ext
+S
−1
˙
S
˙
L −2L
−1
˙
L
2
, (17.41)
where S is the Nose–Hoover thermostat variable with
amassQ, L is the edge length of the cubic simulation
cell with a mass M in Andersen’s method, and s
i
are
rescaled coordinates defined through r
i
= Ls
i
. A coding
procedure using the p-th order Gear method would be
along the following lines
Step 1 Specify the initial position s
i
(t
0
) and its deriva-
tives s
i
(t
0
)tos
(p−1)
i
(t
0
) and assign them to
q
i
(t
0
)fori = 1toN.
Step 2 Consider S(t)andL(t) as coordinates of the
(N +1)-th and the (N +2)-th atom, specify the
initial values for S(t
0
)andL(t
0
) and their deriva-
tives, and assign each to q
N+1
(t
0
)andq
N+2
(t
0
),
respectively.
Step 3 Calculate the predicted coordinates
˜
q
i
(t
0
+Δt)
for i = 1toN +2 at the first step according to
(17.11).
Step 4 Calculate the force F
i
(t
0
+Δt) at the first step
for i = 1toN according to (17.39) by using
˜
q
i
(t
0
+Δt).
Step 5 Calculate the force F
N+1
(t
0
+Δt)andF
N+2
(t
0
+Δt) at the first step according to (17.40)and
(17.41) by using
˜
q
i
(t
0
+Δt).
Step 6 Compute the corrected q
i
(t
0
+Δt) according to
(17.12)fori = 1toN +2.
Step 7 Repeat steps 3 to 6 with t
0
→t
0
+Δt.
Part E 17.1
Molecular Dynamics 17.1 Basic Idea of Molecular Dynamics 985
We can also perform a simulation of the NPT en-
semble by combining the momentum-scaling method
for temperature control and the Parrinello–Rahman
method for pressure control. A coding procedure using
the p-th order Gear method is similar to the preceding
case
Step 1 Specify the initial position s
i
(t
0
) and its deriva-
tives s
i
(t
0
)tos
(p−1)
i
(t
0
) and assign them to
q
i
(t
0
)fori = 1toN.
Step 2 Specify the initial values for h
αβ
(t
0
), that is, the
shape of the simulation cell, and their deriva-
tives, consider h
αβ
(t) as coordinates of the (N +
1)-thtothe(N +9)-th atom, and assign each to
q
N+1
(t
0
)toq
N+9
(t
0
).
Step 3 Calculate the predicted coordinates
˜
q
i
(t
0
+Δt)
for i = 1toN +9 at the first step according to
(17.11).
Step 4 Calculate the force F
i
(t
0
+Δt) at the first step
for i = 1toN according to (17.35)and(17.36)
by using
˜
q
i
(t
0
+Δt).
Step 5 Calculate the force F
N+i
(t
0
+Δt)atthefirst
step for i = 1 to 9 according to (17.37) by using
˜
q
i
(t
0
+Δt).
Step 6 Compute the corrected q
i
(t
0
+Δt) according to
(17.12)fori =1toN +9.
Step 7 Repeat steps 3 to 6 with t
0
→t
0
+Δt.
Step 8 Rescale the atomic momenta p
i
(t)fori =1toN
according to (17.18) after every N
rescale
steps.
17.1.4 Interaction Potentials
The time evolution of the simulation system completely
depends on the forces interacting between atoms, which
are usually derived from interaction potentials. Possible
forms of the interaction potentials popularly used in
simulations will be presented in this section. Among
them, the Lennard-Jones two-body potential and the
embedded-atom method (EAM) many-body potential,
both of which are used repeatedly throughout this chap-
ter, will be given special attention.
The functional form φ(r
1
, r
2
,...) of the potential
function plays a crucial role in MD simulation, not only
in the physical aspects but also in the technical aspects
for coding. In this respect, the potential forms can be
classified into two following categories: two-body po-
tentials and many-body potentials. The former can be
expressed as a sum of functions of atomic distances as
φ(r
1
, r
2
,...) =
i, j
φ
ij
r
i
−r
j
. (17.42)
Lennard-Jones Potential
One of the simplest and commonly used two-body
potentials is the m −n Lennard-Jones (LJ) potential,
in which the pairwise interaction between elements
A and B separated by distance r is written as
φ
AB
(r) =e
AB
0
r
AB
0
r
m
−
m
n
r
AB
0
r
n
. (17.43)
Here the parameters m and n can be adjusted accord-
ing to the elements in the system and are taken to be
integers in many cases. For example, (m, n) =(12, 6)
is used for rare gasses, while (m, n) =(8, 4) has been
proved [17.15] to be adequate to describe metallic sys-
tems. The potential has its minimum, −e
AB
0
,atthe
distance r
AB
0
. Therefore, we can consider these two pa-
rameters as the chemical bond strength and the atomic
size, respectively.
EAM Potential
It is well known that two-body potentials cannot re-
produce the Cauchy discrepancy between the elastic
constants and the correct vacancy formation energy.
A straightforward remedy for the problem is to use
many-body potentials. Among them, one of the most
popular many-body potentials used for metallic systems
is called the embedded-atom method (EAM) [17.16],
which is based on the effective medium theory. In this
framework, the potential energy is written as
φ =
i
F
A
(ρ
i
) +
i, j
ϕ
AB
ij
(r
ij
) . (17.44)
Here the first term F
A
(ρ
i
) corresponds to the energy
required to embed atom i into the electron dens-
ity ρ
i
, while the second term ϕ
AB
ij
corresponds to
the core-to-core repulsion energy between atom i and
atom j separated by the distance r
ij
expressed in a pair-
wise functional. The suffices A and B denote the species
of the atoms. The former term incorporates the many-
body effect through the electron density assumed to be
a linear superposition
ρ
i
=
i, j
f
A
i
(r
ij
) , (17.45)
where f
A
i
(r
ij
) is the contribution to the electron dens-
ity ρ
i
at atom i due to atom j at the distance r
ij
.
The functional forms of f (r)andϕ(r) are deter-
mined so as to reproduce the static properties such as
the cohesive energy, lattice constants, elastic constants,
Part E 17.1
986 Part E Modeling and Simulation Methods
and the vacancy formation energy. For example, simple
exponential forms such as
f
A
(r) = f
A
0
exp
−β
A
r/r
AA
0
, (17.46)
ϕ
AB
(r) =ϕ
AB
0
exp
−γ
A
r/r
AB
0
, (17.47)
are often used, where f
A
0
,ϕ
AB
0
,β
A
and γ
A
are par-
ameters, and r
AB
0
is the equilibrium nearest-neighbor
distance.
On the other hand, the standard way to deter-
mine the embedding function F
A
(ρ
i
)israthermore
complicated. In the original scheme suggested by
Foiles [17.17], the Rose equation of state is used to de-
termine the form of F
A
(ρ
i
). The Rose equation of state
is given from the empirical experimental data and shows
the dependence of the cohesive energy of a cubic crystal
on the nearest-neighbor distance r as
E
A
(r) =−E
A
c
1+α
A
r/r
AA
0
−1
e
−α
A
r/r
AA
0
−1
,
(17.48)
where E
A
c
is the cohesive energy with the equilibrium
lattice parameter and the parameter α
A
is defined as
α
A
=3
Ω
A
0
B
A
0
/E
A
c
, (17.49)
using the equilibrium atomic volume Ω
A
0
and the bulk
modulus B
A
0
of the equilibrium state. By using the
expression (17.44), the embedding function is calcu-
lated as
F
A
(ρ) = E
A
(r) −
1
2
j
ϕ
AA
ij
(r
ij
)
,
(17.50)
where the calculation is performed for a cubic lattice
with the nearest-neighbor distance r,andr would be
varied around its equilibrium value r
AA
0
to obtain the
value of F
A
(ρ) around the equilibrium electron dens-
ity ρ
0
.
From a practical point of view, the value of the elec-
tron density ρ does not significantly deviate from its
equilibrium value ρ
0
. Therefore, a polynomial approxi-
mation around ρ
0
is sufficient for calculations except for
cases with highly defective structure, such as a surface
structure
F
A
(ρ) =
i
F
A
i
(ρ −ρ
0
)
i
, i =0, 1, 2,...,
(17.51)
where the coefficients F
A
i
are determined so as to repro-
duce the experimental properties.
According to the tight-binding theory, another func-
tional form F(ρ) has also been suggested. Up to the
second-moment approximation, the functional form of
the embedding function is evaluated as
F(ρ) = F
FS
0
ρ/ρ
0
. (17.52)
This type of potential is called the Finnis–Sinclair po-
tential [17.18] and has been widely used in simulations
of metallic systems.
Cutoff Procedure
Since the functional forms found in (17.43–17.47)have
an infinite interaction range, we usually make a cutoff
termination to the potential functions to decrease the
calculational cost in MD simulations. For each func-
tion to be modified, we set both the starting distance
r
s
where the termination starts and the cutoff distance
r
c
where the modified function vanishes.
The two typical terminating processes are as fol-
lows. One is to exchange the potential function with
a cutoff function g
c
(r)forr > r
s
, which is continuous
at r
s
to the potential function up to the second deriva-
tive, and vanishes for r > r
c
. For the choice of g
c
(r),
a polynomial form is often taken
g
c
(r) =
i
c
i
(r −r
c
)
i
, for r
s
< r < r
c
, (17.53)
where the parameters c
i
are determined to satisfy
continuity at r
s
to the potential function up to the
second derivative, and i = 2, 3, 4, 5,... For exam-
ple, a modified LJ potential with terminating at
the third-order polynomial starting at its inflection
point is called the LJ-spline potential. For the case
(m, n) = (8, 4), which we shall use in the follow-
ing sections, the parameters in (17.53) are uniquely
determined as c
2
=−(10 240/3159)(5/9)
(1/2)
r
−2
0
, c
3
=
−(655 360/369 603)(5/9)
(3/4)
r
−3
0
, and the terminating
position r
c
=(103/64)r
s
∼1.864r
0
by requiring conti-
nuity to the potential function up to the second deriva-
tive at the inflection point r
s
= (9/5)
(1/4)
r
0
≈ 1.158r
0
.
For a smoother cutoff at r
c
, the fourth-order function
(i = 3, 4) would be used.
The other approach is to multiply by a switch-
ing function g
s
(r) that satisfies the properties g
s
(r
s
)
= 1, g
s
(r
s
) = g
s
(r
s
) =0, and g
s
(r
c
) = g
s
(r
c
) = g
s
(r
c
)
=0 to the potential function on the interval [r
s
, r
c
]. For
example, if we take a polynomial function
g
s
(r) =
i
d
i
(r −r
c
)
i
, for r
s
< r < r
c
(17.54)
of fifth order, that is, i = 3, 4, 5, then the coeffi-
cients in (17.54) are determined as d
3
=10(r
s
−r
c
)
−3
,
Part E 17.1
Molecular Dynamics 17.1 Basic Idea of Molecular Dynamics 987
d
4
=−15(r
s
−r
c
)
−4
,andd
5
=6(r
s
−r
c
)
−5
. An expo-
nential form such as
g
s
(r) =exp
(r −r
s
)
3
(r −r
s
)
2
−(r
s
−r
c
)
2
, (17.55)
can be also used for the switching function.
17.1.5 Physical Observables
The method of extracting physical observables will be
explained in this subsection. Various observables can be
calculated by the MD simulations, including volume,
energy, pressure, elastic moduli, diffusivity, viscosity,
radial distribution function, etc. Here only formulas for
evaluating the observables are shown in this section,
while the examples applied to the actual MD simula-
tions will appear in later sections.
Thermodynamical Properties
In the course of the MD simulation, thermodynamical
properties such as the total volume V and the inter-
nal energy E are always calculated, so they are easy to
monitor. The internal pressure P of the simulation sys-
tem can also be monitored by using (17.23). In ordinary
MD simulations, we consider a long-time average of the
thermodynamical properties as an ensemble average
O
ensemble
=
O
time
. (17.56)
In the actual estimation of these observables, we usu-
ally take an average over 100–10 000 time steps, among
which the longer time averages reduce the effect of
thermal fluctuations and statistical errors. Other ther-
modynamical properties, such as the specific heat or
the thermal expansion rate, can be estimated from the
change of E and V with T or P.
Structural Properties
The radial distribution function provides a lot of in-
formation about atomistic structure. It can be directly
calculated from the atomic coordinates r
i
(t). In many
cases, by taking a time average of the pair distribution
i, j
r
i
(t)−r
j
(t)
2
, (17.57)
we can greatly reduce the effect of thermal vibrations.
Microscopic structural properties such as the num-
ber of atomic pairs or local symmetry properties around
each atom also yield important information [17.19].
One of the popular methods used to investigate the mi-
croscopic structure is Voronoi polyhedra analysis. Some
examples will be given in Sect. 17.3.2.
Dynamical Properties
Among the dynamical and transport properties, the
diffusivity is easy to estimate because we know the
position of all atoms. That is, we can estimate the self-
diffusion coefficient D from the linear part in the time
evolution of the mean square displacement of the atoms
as
1
N
i
r
i
(t
0
) −r
i
(t
0
+t)
2
=
1
6
Dt +const. ,
(17.58)
where the time average ··· starts from the initial
time t
0
. The diffusivity D can be also calculated from
the zero mode of the velocity autocorrelation function
1
N
i
v
i
(t
0
) ·v
i
(t
0
+t)
(17.59)
as
D =
1
3
∞
0
dt
1
N
i
v
i
(t
0
)·v
i
(t
0
+t)
v
i
(t
0
)
2
.
(17.60)
In the same manner, the viscosity η
αβ
can be estimated
from the stress autocorrelation function as
η
αβ
=
1
k
B
T
∞
0
dt
V(t
0
)
P
αβ
(t
0
)P
αβ
(t
0
+t)
P
αβ
(t
0
)
2
,
(17.61)
where the stress tensor P
αβ
is found from (17.23), and
the Greek symbols take the Cartesian values 1, 2, or 3.
Elastic moduli can be calculated [17.20] from a ther-
modynamical fluctuation formula. From a long-time
average of the fluctuation of the stress tensor P
αβ
,the
adiabatic elastic coefficients C
αβ;γδ
can be calculated as
C
αβ;γδ
=−
V
k
B
T
P
αβ
P
γδ
−
P
αβ
P
γδ
+
Nk
B
T
V
δ
αδ
δ
βγ
+δ
αγ
δ
βδ
+
1
V
!
i, j
r
−2
ij
∂
2
φ/∂r
2
ij
−r
−1
ij
∂φ/∂r
ij
× r
ijα
r
ijβ
r
ijγ
r
ijδ
"
, (17.62)
where δ
αβ
is the Kronecker delta, and k
B
is the Boltz-
mann constant.
The vibration modes of atomic motion can also be
calculated from the velocity autocorrelation (17.59); ex-
amples will appear in Sect. 17.3.2.
Part E 17.1