Чикуров Н.Г. Алгоритмическое и программное обеспечение компьютерных систем управления
Подождите немного. Документ загружается.

80
прихода электропривода в конечную точку пути с заранее заданной
скоростью значительно усложняются.
В рассматриваемом модуле разгон и торможение происходят по
линейно-параболическому закону (S-образному закону) в зависимости от
времени. Движение по S-образному закону означает, что траектория
сконструирована из трех основных участков. График изменения скорости
в режиме разгона включает следующие участки: разгон по нижней
параболе, разгон по прямой, разгон по верхней параболе. Торможение
реализовано по траектории: участок коррекции, торможение по верхней
параболе, торможение по прямой линии, торможение по нижней
параболе.
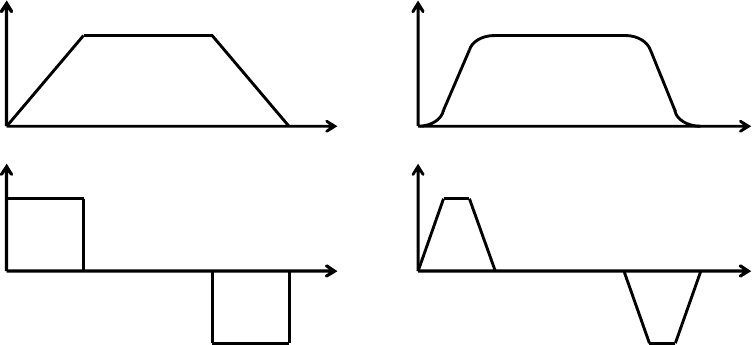
В отличие от алгоритмов с трапецеидальным графиком
изменения скорости предлагаемый алгоритм позволяет
компенсировать ударные динамические нагрузки, действующие на
электроприводы подачи в переходных режимах (рис.3.12).
Рис. 3.12. Графики изменения скорости: а – трапецеидальный; б – S-образный
Моделирование механической части электропривода
показывает, что при плавном изменении ускорения амплитуды
упругих колебаний в электроприводе при использовании второго
алгоритма (рис. 3.12, б) значительно меньше по сравнению с
первым алгоритмом (рис. 3.12, а). Плавное уменьшение скорости
подачи особенно важно для режимов позиционирования, когда
V
W
V
W
t
t
t
t
а б
81
требуется перемещать массивные рабочие органы станка в
определенные точки с наименьшей погрешностью.
Изменение скорости по параболическому закону описывается
дифференциальным уравнением
2
2
.
dV
c
dt
=
(3.1)
Этому уравнению соответствует передаточная функция
2
1
(),
V
Wp
cp
==
где c – постоянная параболы; V – скорость; p – оператор
дифференцирования.
Постоянная параболы равна
a
c
2
=
,
где a – коэффициент крутизны параболы.
Решением уравнения (3.1) является выражение
2
at
V
=
.
Дифференцируя это выражение, получаем ускорение
at
V
2
=
&
.
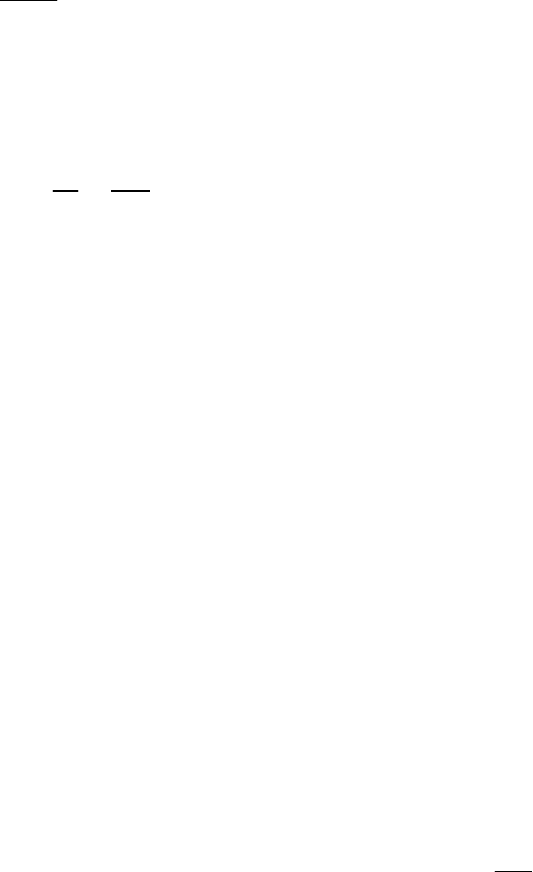
Для реализации в цифровом виде интегрирующее звено
2
1
p
заменим двумя последовательными сумматорами (рис. 3.13).
Величина
n
V
&
на выходе первого интегратора представляет собой
арифметическую прогрессию
C
n
V
n
V +=
+
&
&
1
,
где
2
0
2aTC = – постоянная параболы в цифровом варианте; T
0
–
период квантования по времени.
82
Рис. 3.13. Цифровая модель воспроизведения нижней параболы
В n-м цикле квантования значение величины
n
V
&
можно
определить по формуле
nC
n
V =
&
.
Значение скорости V
n
на выходе есть сумма арифметической
прогрессии
1
,
2
n
n
V nC
+
= (3.2)
а пройденный путь S
n
– это сумма сумм арифметической прогрессии
(рис. 3.14).
Рис. 3.14. Изменение скорости по нижней параболе
C
nnn
S
n
6
)1()1(
+
-
= ,
1
0 nn
£
£
,
S
S
T
0
T
0
С
n
V
&
V
V
1
n
V
n
1
n
n
V
n
S
0

83
где n
1
– число циклов движения по нижней параболе.
Значение n
1
находим из граничного условия:
max
1
1
VCn
n
V D==
&
,
где
max
V
D
– максимальный наброс скорости за период таймера.
Откуда
max
1
.
V
n
C
D
= (3.3)
Соответственно скорость в конце рассматриваемого участка
равна
1
11
( 1)
2
n
n
V nC
+
= . (3.4)
Изменение скорости по линейному закону описывается
дифференциальным уравнением:
dV
s
dt
=
. (3.5)
Этому уравнению соответствует передаточная функция:
ps
V
pW
1
)( == ,
где s – угловой коэффициент прямой; V – скорость.
Решением уравнения (3.5) является выражение
st
V
=
.
Цифровая модель воспроизведения прямой показана на рис.3.15.
84
Рис. 3.15. Цифровая модель воспроизведения прямой
Величина скорости описывается арифметической прогрессией
max1
VVV
nn
D
+
=
+
,
где
0max
TkV
×
=
D
.
Значение скорости V
n
на выходе модуля вычисляется по
формуле
max
VnV
n
D
=
.
Пройденный путь определяется суммой арифметической
прогрессии:
max
2
)
1
(
V
n
n
S
n
D
-
= , 0 £ n £ n
2
,
где n
2
– число циклов движения по прямой.
График изменения скорости по линейному закону показан на
рис. 3.16.
Рис. 3.16. Изменение скорости по прямой
S
T
0
V
ΔV
max
V
V
n
2
n
n
2
V
n
S
n
0

85
Чтобы получить верхнюю параболу, надо сделать зеркальное
отображение нижней параболы относительно оси n (рис. 3.14),
перевернуть это отображение вокруг вертикальной оси и сместить
вверх на величину V
n3
. Запишем указанные преобразования нижней
параболы с помощью математических формул.
13 13
,,
nn
nn VV
==
(3.6)
где n
3
– число циклов движения по верхней параболе, V
n3
– скорость
в конце участка верхней параболы.
Далее следует подставить в формулу (3.5) смещенные значения
(n
3
-n) вместо n, изменить знак перед правой частью уравнения на
противоположный и прибавить величину V
n3
. В результате получаем
[
]
C
nnnn
VV
nn
2
1)()(
33
3
+
-
-
-= ,
C
nn
VnV
n
2
)1(
max
-
×
-D= .
Чтобы определить путь S для третьего участка, запишем
формулу в виде разности двух выражений
***
nnn
VVV -=
соответственно для пути
***
nnn
SSS -= .
Путь для первого выражения
*
n
V известен
max
*
2
)1(
V
nn
S
n
D
-
= .
Путь для второго выражения найдем в следующей
последовательности.
Если
86
C
nn
V
n
2
)1(
**
-
= ,
то в следующем цикле
C
nn
V
n
2
)1(
**
1
+
=
+
.
Сумма для этого выражения известна
C
nnn
S
n
6
)1()1(
**
1
+
-
=
+
,
или
C
nnn
S
n
6
)1)(2(
**
-
-
= .
Общий путь S для участка верхней параболы равен
C
nnn
V
nn
S
n
6
)1)(2(
2
)1(
max
-
-
-D
-
= .
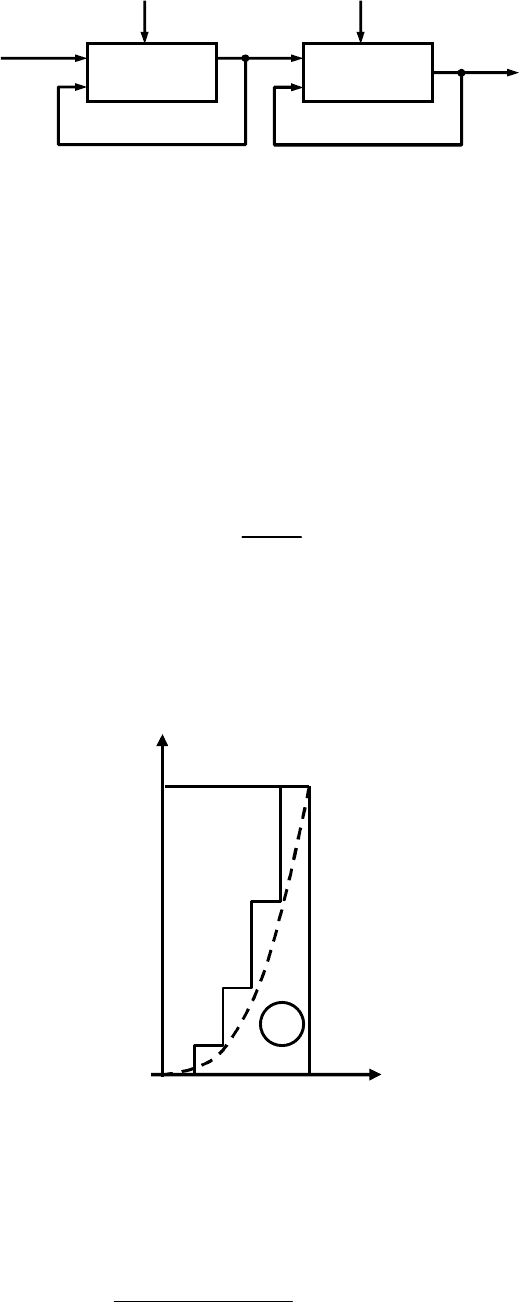
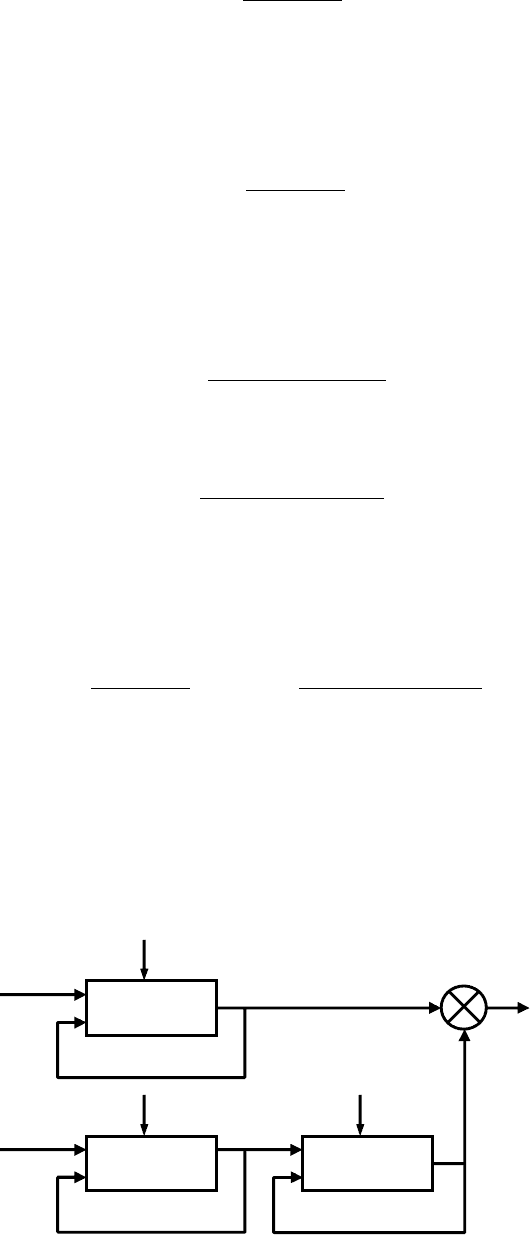
Цифровая модель воспроизведения верхней параболы показана
на рис. 3.17. График изменения скорости по верхней параболе
показан на рис. 3.18.
Рис. 3.17. Цифровая модель воспроизведения верхней параболы
S
S
T
0
T
0
C
V
S
T
0
D
V
max
87
Рис. 3.18. Изменение скорости по верхней параболе
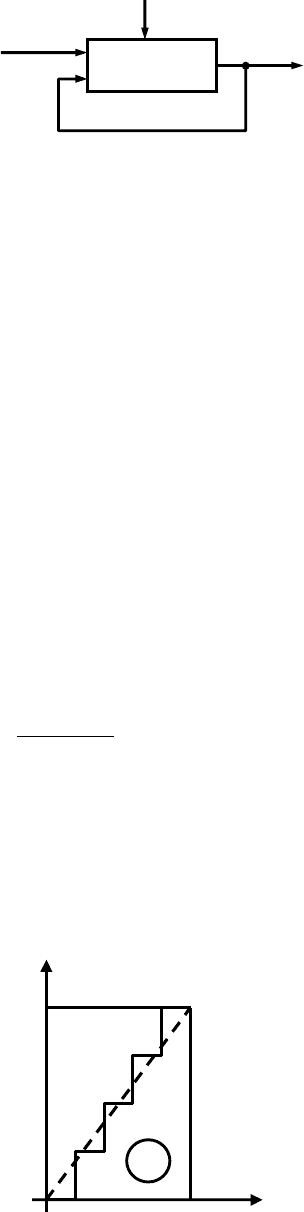
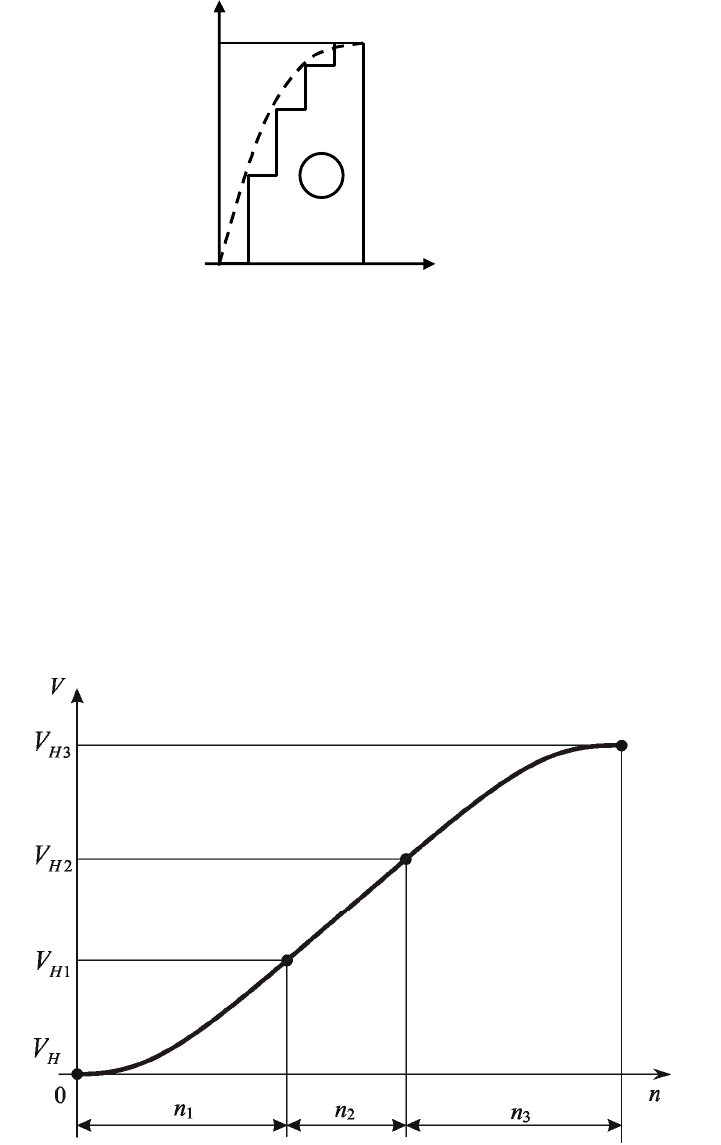
На основе рассмотренных математических формул построен
модуль управления скоростью в системе ЧПУ класса ICNC. Алгоритм
этого модуля формирует комплексный график S-образной
характеристики при разгоне от начальной скорости V
н
до заданной
скорости V
n3
(рис. 3.19).
Рис. 3.19. Разгон по S-образной характеристике
При выполнении коротких кадров скорость на участке разгона,
не достигнув заданного верхнего значения, в конце участка
торможения может уменьшиться до нижнего значения или может
V
V
n3
n
n
3
V
n
S
n
0
88
непрерывно возрастать от кадра к кадру, если на каком-то участке
пути предусмотрено увеличение скорости. Граничные значения
скорости в начале и в конце каждого кадра рассчитываются с
помощью специального модуля Look-Ahead (взгляд вперед).
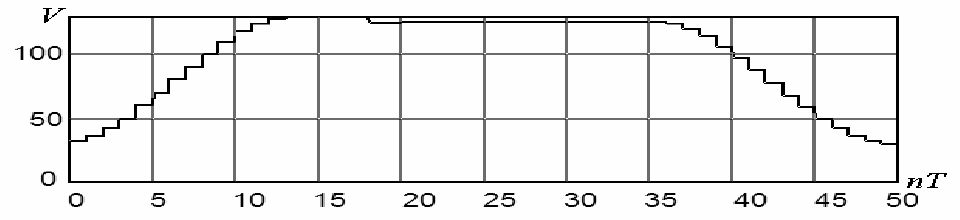
Результат работы модуля разгона-торможения с автоматической
коррекцией скорости в конце кадра показан на рис. 3.20.
Рис. 3.20. Результат работы модуля разгона и торможения
В модуле можно настраивать время разгона, постоянную
параболы и допустимый наброс скорости в широких пределах. Это
обеспечивает плавное управление электроприводами. В результате
повышается точность обработки деталей. При наличии в
электроприводе упругих связей торможение по S-образному закону
уменьшает амплитуду колебаний по сравнению с линейным
торможением примерно на порядок. Применение рассмотренного
модуля в системах ЧПУ позволяет увеличить скорости быстрых ходов
и решить задачу Look-Ahead, то есть задачу выравнивания скоростей
подач между соседними кадрами.
3.3 Алгоритм микроинтерполяции
Перспективным архитектурным решением компьютерной
системы ЧПУ является система распределенного типа (рис. 3.21).
Одна из составляющих ее программно-математического обеспечения
– микроинтерполятор [17]. Именно на алгоритме
микроинтерполяции базируется архитектура такой СЧПУ.
Основой распределенной СЧПУ служит ЭВМ типа IBM PC.
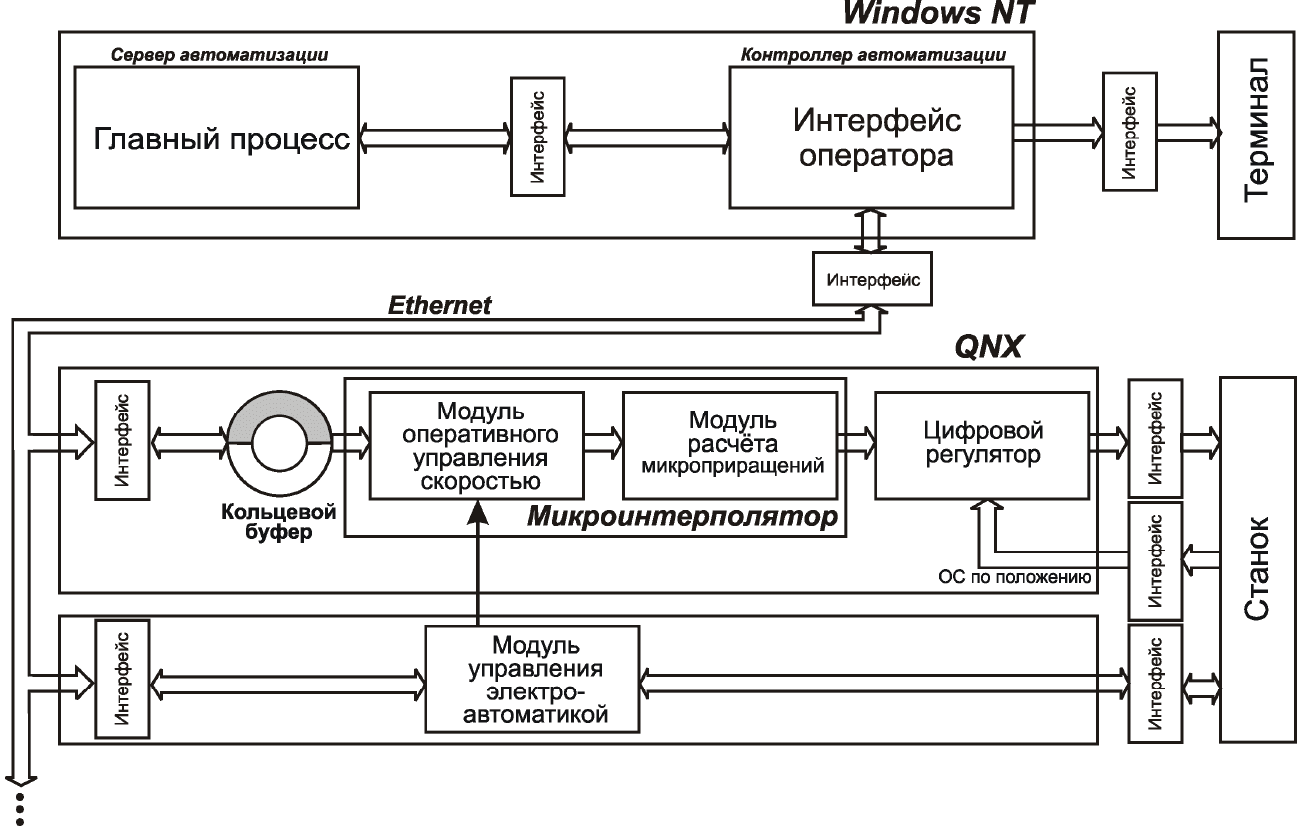
89
Рис. 3.21. Архитектура распределенной системы ЧПУ