Чикуров Н.Г. Алгоритмическое и программное обеспечение компьютерных систем управления
Подождите немного. Документ загружается.

100
значениями коэффициентов для аналогового и для цифрового
вариантов регуляторов существуют следующие зависимости:
0
2,
1,
KK
K KT
=
=
П
И
где
K
П
– коэффициент пропорциональной составляющей аналогового
варианта ПИ – регулятора;
K
И
– коэффициент интегральной
составляющей аналогового варианта ПИ-регулятора.;
0
T
– период
таймера.
С помощью коэффициента
3
K
в выходной сигнал регулятора
положения вводится сигнал коррекции по входному воздействию. При
правильно подобранном значении этого коэффициента ошибка по
положению
DS
в установившемся режиме стремится к нулю, т.е.
система управления становится астатической по входному
воздействию.
Суммарный сигнал на выходе регулятора первоначально
формируется в виде слова двойной длины (32 разряда). От него
отсекается старшее слово (16 разрядов) и под именем
VPRIV
передается на цифро-аналоговый преобразователь (ЦАП) контура
скорости электропривода.
4.2. Подчиненное управление электроприводами
в компьютерных системах ЧПУ с использованием
предикаторов
Для управления электроприводами в компьютерных системах
ЧПУ, в частности в системах ЧПУ класса ICNC (Industrial Computer
Numerical Control) [12], разработан цифровой регулятор на основе
предикаторов (упредителей Смита) [11]. Чтобы получить высокое
качество переходных процессов в системах подчиненного управления
электроприводами, применяют ПИД-регуляторы. Однако из-за низкой
помехоустойчивости и повышенной инерционности применение
ПИД-регуляторов в таких системах ограничено. Регулятор на основе
предикаторов свободен от указанных недостатков.
101
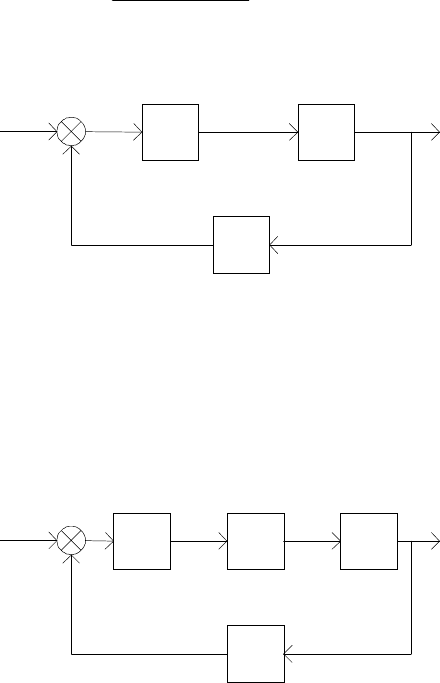
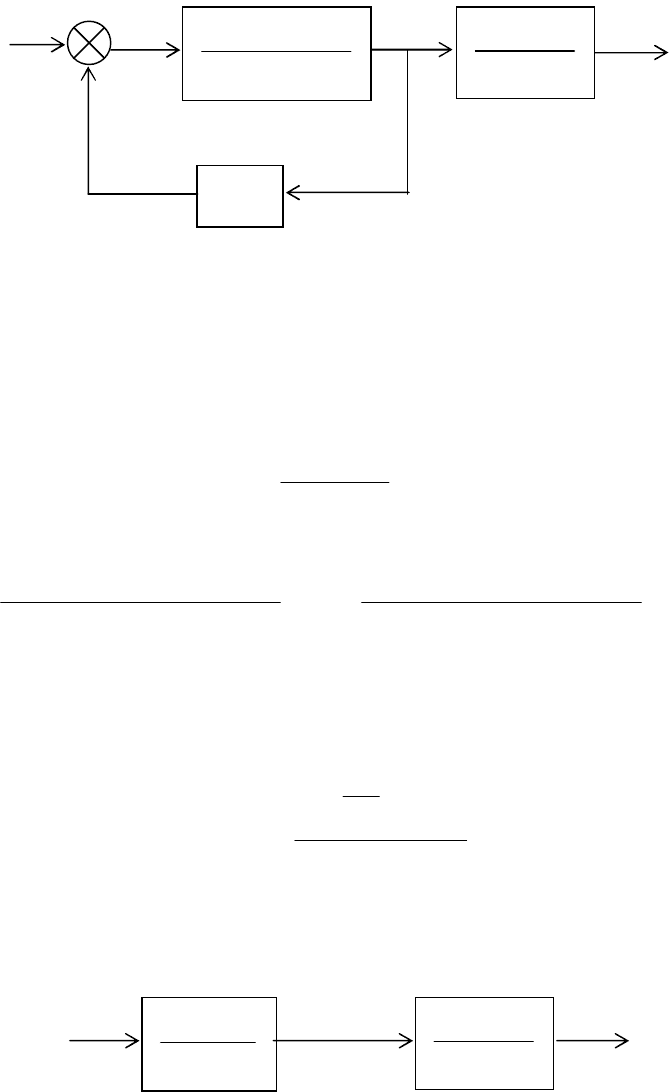
Принцип действия предикатора
Рассмотрим систему управления, которая содержит изменяемую
часть W
o
, неизменную часть Н и обратную связь с коэффициентом
передачи K
o
(рис.4.2). В изменяемую часть входит регулятор, а
неизменной частью может быть апериодическое звено, группа
последовательно соединенных апериодических звеньев или, наконец,
звено чистого запаздывания. В общем случае звено Н оказывает
вредное влияние на процесс управления, так как ограничивает общий
коэффициент усиления разомкнутой системы.
Передаточная функция замкнутой системы W
3
3
1
o
oo
WH
W
W HK
=
+
.
W
0
H
K
O
X
Y
Рис.4.2
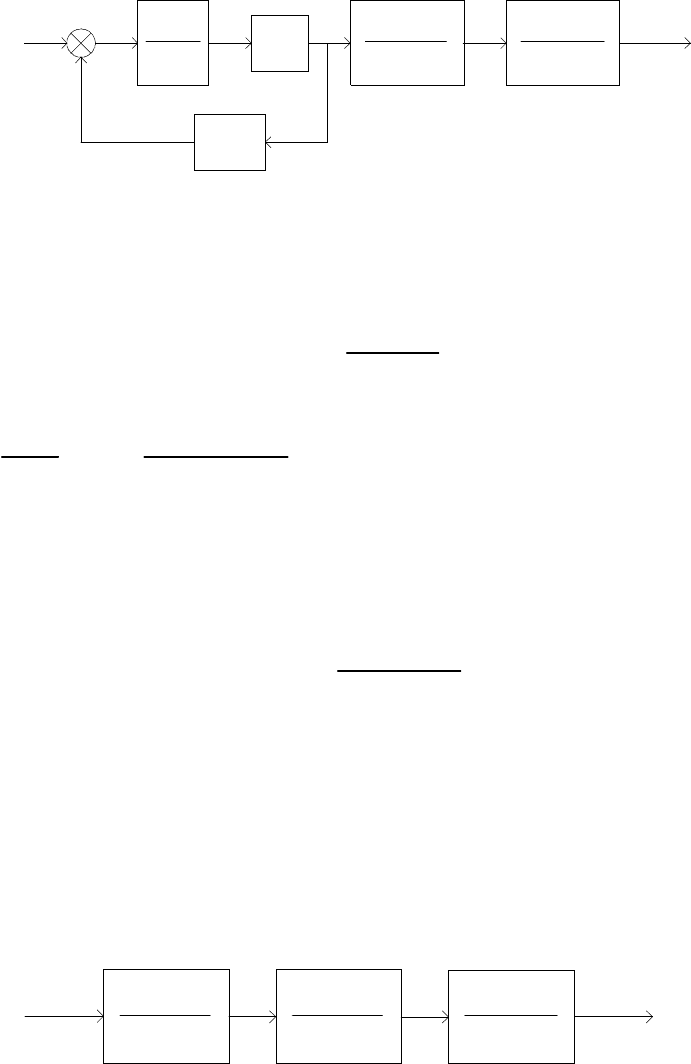
Введем в систему последовательное корректирующее
устройство с передаточной функцией W
K
(рис.4.3).
W
K
H
K
O
X
Y
W
0
Рис.4.3
Тогда передаточная функция системы с W
K
будет равна:
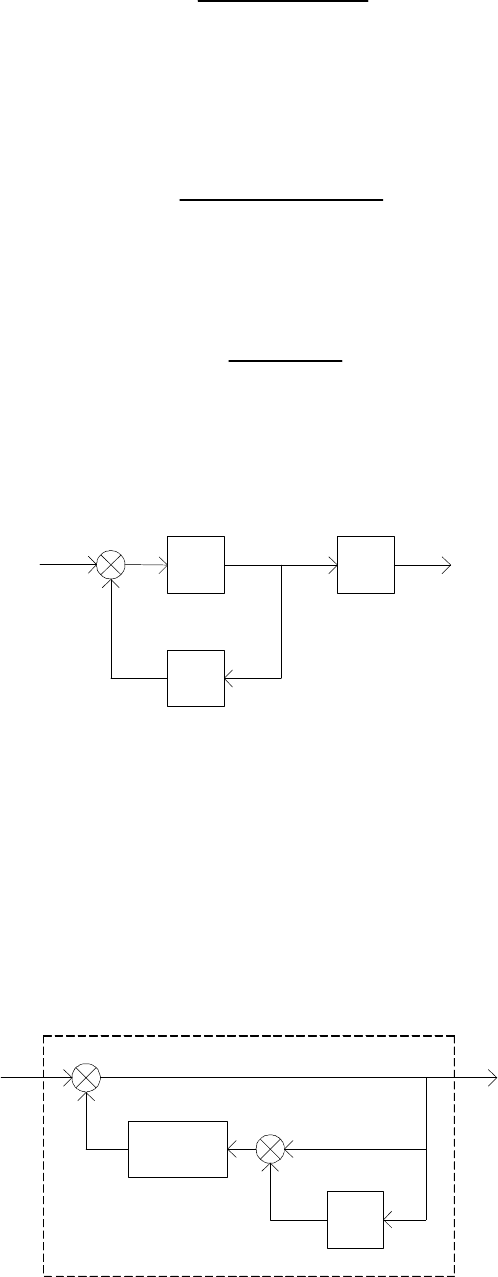
102
3
1
ko
k
koo
WWH
W
W W HK
=
+
.
Если W
K
выбрать так, что
1
1(1)
K
oo
W
HWK
=
+-
,
то
1
o
ЗK
oo
W
W
WK
=
+
.
Полученное выражение эквивалентно структурной схеме на рис.4.4.
H
K
O
X
Y
W
0
Рис.4.4
Звено с передаточной функцией Н оказалось вынесенным за
контур обратной связи и не оказывает вредного влияния на процесс
управления. Реализовать такое корректирующее устройство не-
сложно, его структурная схема представлена на рис.4.5.
W
0
K
O
H
W
K
Рис.4.5
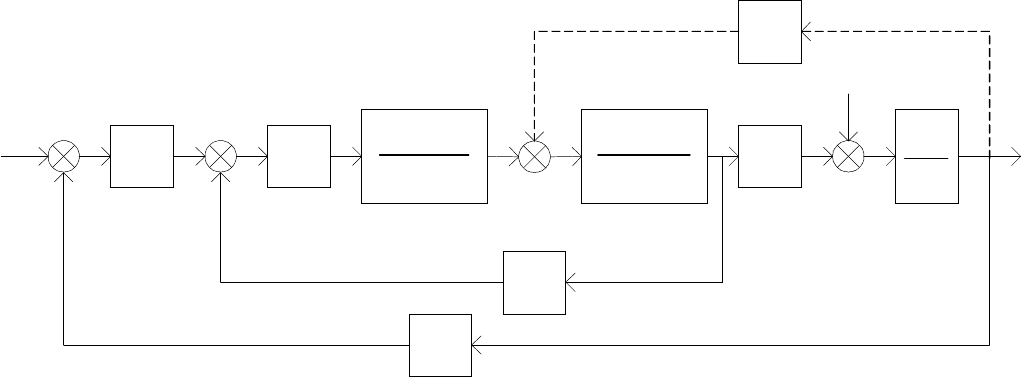
103
Данное корректирующее устройство предопределяет
управляющее воздействие, передаваемое на объект, и называется
предикатором. В системах управления электроприводами кроме
последовательных предикаторов применяются и параллельные
предикаторы.
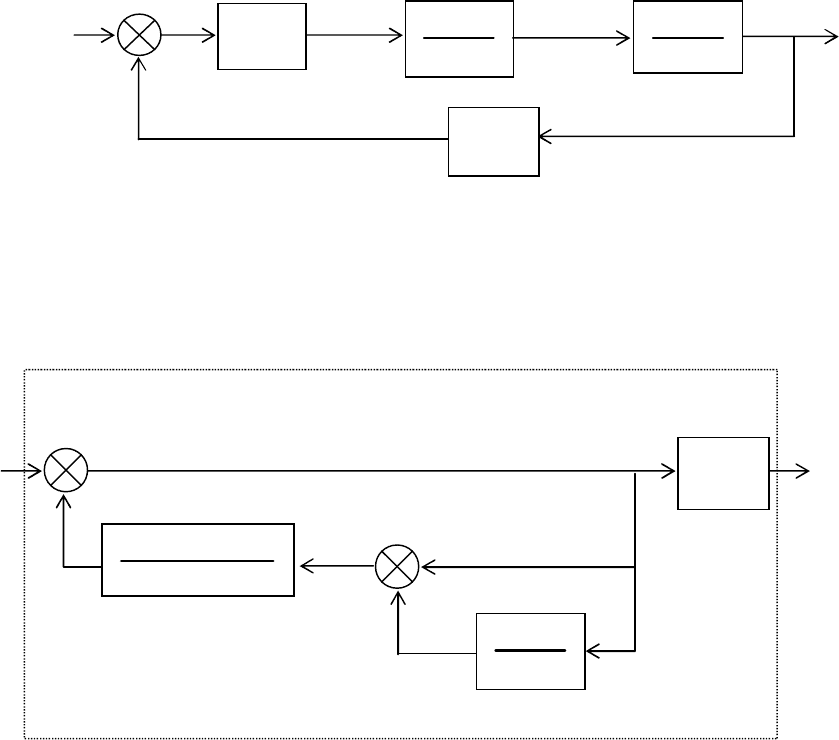
Двухконтурный регулируемый электропривод
Чтобы повысить быстродействие электродвигателя, надо его
якорь питать не от источника напряжения, а от источника тока. С
этой целью введем в систему управления контур обратной связи по
току – контур тока (рис.4.6).
W
PC
W
PT
1
У
У
K
TP
+
1
Я
Я
K
TP
+
C
D
K
P
C
K
OT
Koc
U
V
V
U
D
U
I
I
U
D
U
У
U
Я
I M
M
H
w
Рис.4.6
На рисунке обозначено: W
PC
– регулятор скорости; W
PT
–
регулятор тока; Tя=L/R – постоянная времени якорной цепи; Kd=1/J
– динамический коэффициент, определяемый массой якоря; Kос –
коэффициент передачи обратной связи по скорости; Kу –
скоэффициент передачи силового усилителя; Tу – постоянная
времени силового усилителя; Кя=1/R – коэффициент передачи
якорной цепи.
При заданном токе ЭДС якоря слабо влияет на ток, а
следовательно, и на момент электродвигателя. Поэтому обратной
связью по ЭДС мы временно пренебрегаем. Во время переходных
режимов скорость изменения движущего момента определяется
Контур тока
Контур скорости
104
скоростью изменения тока. Следовательно, контур тока должен быть
достаточно быстродействующим.
а) Настройка контура тока
Чтобы обеспечить необходимое быстродействие контура тока,
применим в нем регулятор тока W
PT
(рис.4.7) [11].
Рис.4.7
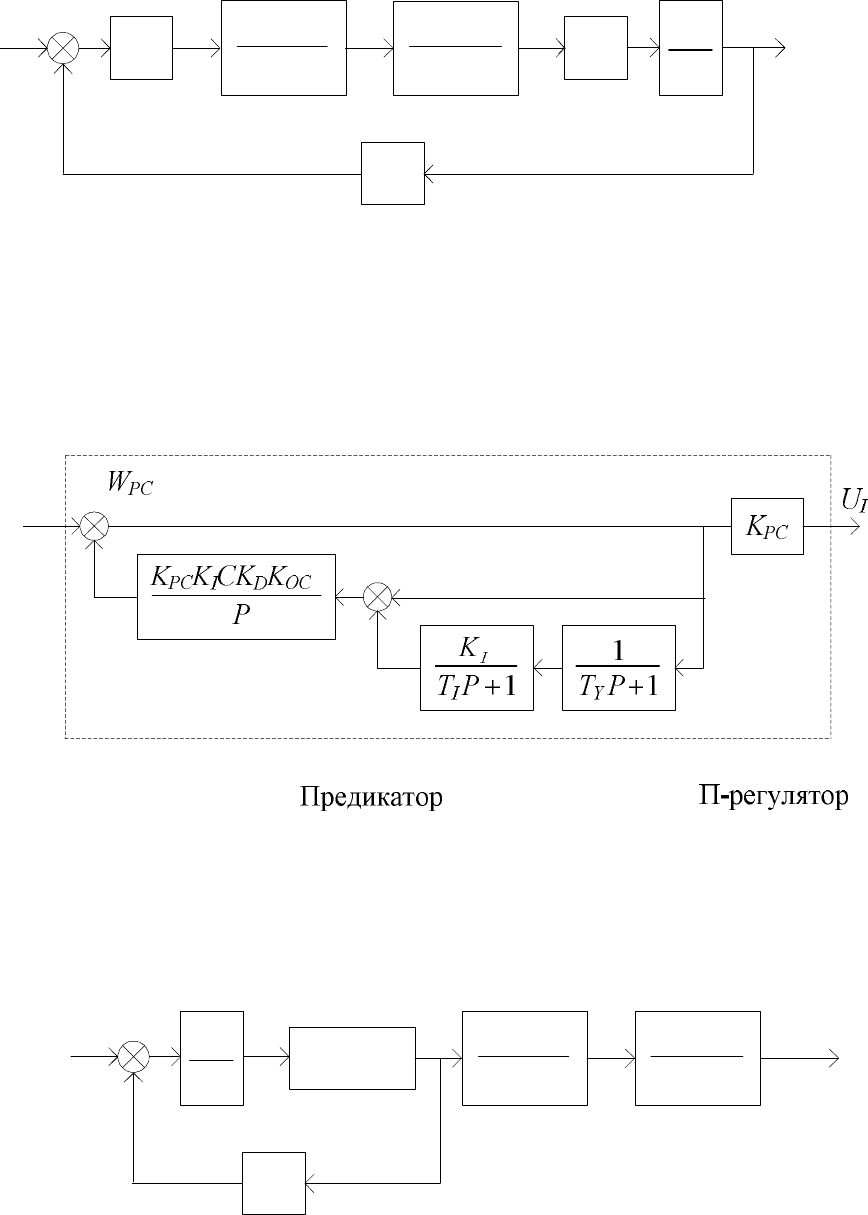
В качестве регулятора тока используем П-регулятор с
предикатором (рис.4.8).
14444444444244444444443
142 43
Рис.4.8
Эквивалентная схема контура тока с учетом регулятора имеет
вид, показанный на рис.4.9.
D
U
I
РТ
W
Контур тока
1
K
у
TуP
×+
1
K
я
TяP
×+
ОТ
К
UяUу IU
I
П-регуляторПредикатор
∆U
I
U
У
РТ
К
1
PTY
Я ОТ
K KKK
TяP
×××
×+
РТ
W
1
1
TyP
×+
105
Рис.4.9
Передаточная функция замкнутого контура
1
I
I
K
TP
×+
,
где
1
PTY Я
I
PTY
Я ОТ
K KK
K
К ККК
××
=
+ ×××
;
1
Я
I
PTY
Я ОТ
T
T
К ККК
=
+ ×××
.
Принимаем T
I
=0,001..0,003 c, тогда
1
Я
I
PT
Y
Я ОТ
T
T
K
ККК
-
=
××
Эквивалентная схема контура тока представлена на рис.4.10.
Рис.4.10
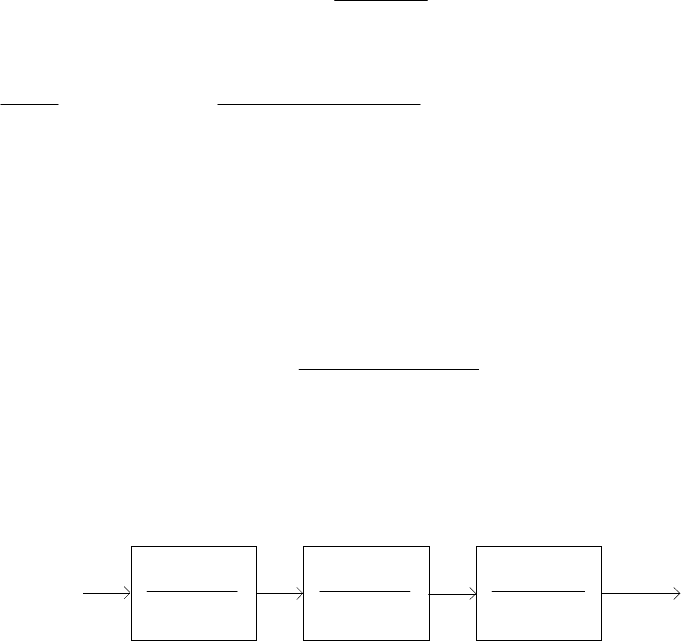
б) Настройка контура скорости
С учетом настроенного контура тока рассмотрим контур
скорости (рис.4.11).
1
1
TyP
×+
OТ
К
1
PTY
Я
Я
K KK
TP
××
×+
IU
I
1
1
TyP
×+
1
I
I
K
TP
×+
I
U
106
W
PC
1
I
K
T
I
P +
1
1
T
У
P+
C
D
K
P
K
OC
V
U
V
U
D
I
U
I
M
w
Рис.4.11
Чтобы исключить вредное влияние двух апериодических
звеньев 1/(T
I
P+1) и 1/(T
У
P+1) на процесс управления скоростью,
применим в качестве регулятора скорости предикатор в сочетании с
П - регулятором (рис.4.12).
V
U
D
14444444444244444444443
142 43
Рис.4.12
С учетом предикатора контур скорости приобретает вид,
представленный на рис.4.13.
1
1
T
I
P + 1
1
T
Y
P +
K
OC
U
V
w
D
K
P
K
PC
K
I
C
Рис.4.13
107
Передаточная функция замкнутого контура
1
V
V
V
K
W
TP
=
+
,
где
1
V
OC
K
K
= ;
1
V
PC D I OC
T
K K K CK
= .
Задавшись значением T
V
=0.001 – 0.003 с., определим
коэффициент регулятора скорости:
1
PC
V D I OC
K
T K K CK
= .
Эквивалентная схема контура скорости показана на рис.4.14.
1
1
T
I
P + 1
1
T
Y
P+
U
V
w
1
K
V
T
V
P +
Рис.4.14
Ошибка
e
данного электропривода от возмущающей нагрузки
M
H
определяется выражением:
H Д
( ).
V yI
MKTTT
e= ++
Отсюда видно, что жесткость электропривода ограничена
постоянной времени усилителя T
У
, значение которой фиксировано.
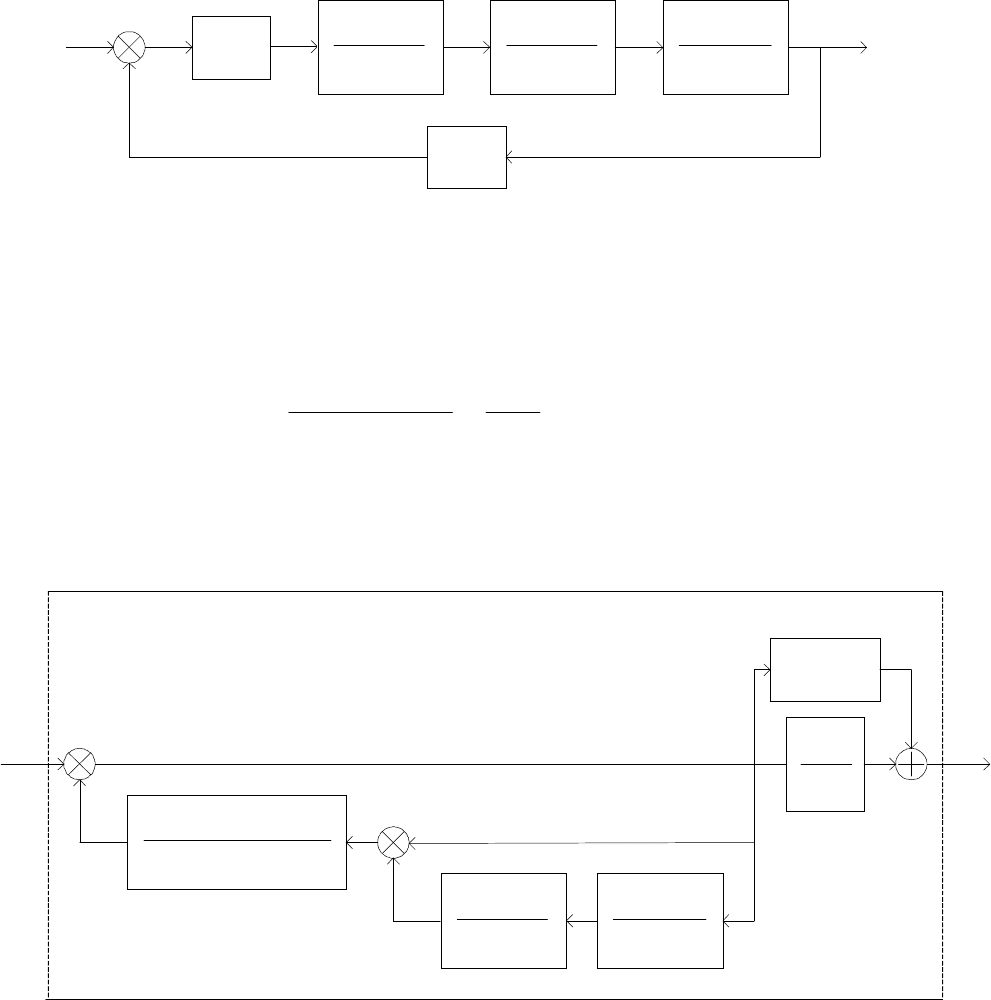
Трехконтурный регулируемый электропривод с астатизмом
первого порядка
Чтобы повысить жесткость электропривода и расширить его
диапазон регулирования, введем третий контур управления с
астатическим регулятором W
РА
(рис.4.15).
108
1
1
T
Y
P + 1
1
T
I
P +
X
w
1
K
V
T
V
P +
W
PA
K
OC
X
D
Рис.4.15
Астатический регулятор W
PA
представляет собой ПИ-регулятор
( 1)
PAy
PA
PAy
K TP
K
KT
PP
+
=+
в сочетании с предикатором (рис.4.16).
K
PA
K
V
K
OC
P
1
T
I
P+1
1
T
V
+1
W
PA
X
D
U
V
14444444444244444444443
14243
Предикатор
ПИ-регулятор
K
PA
P
K
PA
T
У
Рис.4.16
Благодаря интегрирующему звену, содержащемуся в регуляторе,
система управления электроприводом стала астатической с
астатизмом первого порядка. Это значит, что в установившемся
режиме частота вращения электродвигателя не зависит от величины
109
нагрузки, т.е. диапазон регулирования электропривода теоретически
равен бесконечности.
С учетом астатического регулятора контур управления
скоростью приобретает вид, показанный на рис.4.17.
1
1
T
V
P+ 1
1
T
I
P +
X
w
K
PA
P
K
V
K
OC
Рис.4.17
Передаточная функция замкнутого контура равна:
1
A
A
A
K
W
TP
=
+
,
где
1
A
OC
K
K
= ;
1
A
PA V OC
T
K KK
=
Задавшись значением T
A
=0.001 – 0.003 с, определим
коэффициент регулятора астатизма:
1
PA
A V OC
K
TKK
= ,
Теперь эквивалентная схема контура управления скоростью
представляет собой три последовательно соединенных
апериодических звена с весьма малыми постоянными времени
(рис.4.18).
1
1
T
V
P + 1
1
T
I
P +
X
w
1
K
A
T
A
P +
Рис.4.18