Чикуров Н.Г. Алгоритмическое и программное обеспечение компьютерных систем управления
Подождите немного. Документ загружается.

130
Запишем уравнения трансформаторов, содержащихся в данной
электрической схеме.
111
111
111 111
211
121
121 21 1
1
1011
1011
101
1.1)(),
1.2) ( ) ,
1.3) () () ,
2.1)(),
2.2) ( ) ,
2.3) () () ,
3.1)(),
3.2) ( ) ,
3.3) ()
Rax
ax
ax
ax
Ray
ay
ay
ay
P
P
TRkM
T kV
TkkV
TRkM
T kV
TkkV
TPkM
T kV
Tk
× j=
w× j=
w× j + j ×w=
× j=
w× j=
w× j + j ×w=
× j=
w× j=
w×j
&
&
&
&
&
&
&
0111
(),
P
kV
+ j ×w=
&
&
где
11 11 211
21 11111
() cos (),
() sin ().
krk
krk
j =- × j ×w =- j ×w
j = × j ×w = j ×w
&
&
Дифференциальные уравнения звеньев первой подсистемы.
11
11
1),
2).
D
Dp
w =w
j = -w
&
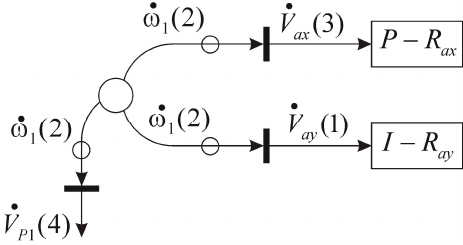
Рассмотрим карту токов первой подсистемы (рис.5.11).
Рис. 5.11
131
Карта токов включает источник тока
ay
IR
-
и приемник тока
ax
PR
-
, через которые подсистема 1 и подсистема 2 обмениваются
значениями производных токов
ax
V
&
и
ay
V
&
, а также значениями э. д. с.
ax
R
и
ay
R
.
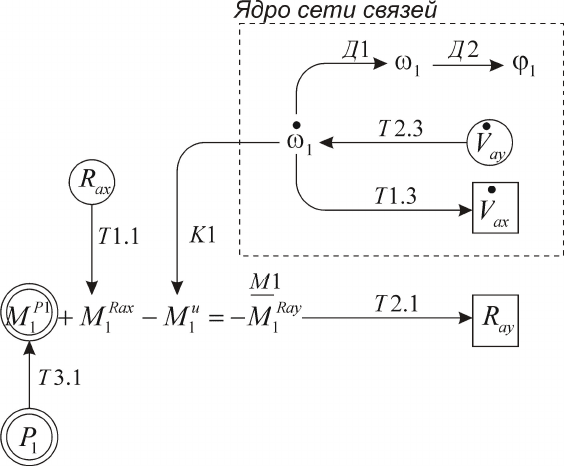
Далее строим сеть связей (рис. 5.12).
Рис. 5.12.
Данная сеть связей состоит из двух частей: ядра и оболочки.
Ядро сети связей включает связи между потоковыми переменными,
т.е. токами и ускорениями токов. Оболочка сети связей
устанавливает связи между потенциальными переменными, куда
входят напряжения и э. д. с. Такое разделение сети связей на две
составляющие будет использовано позже для построения
кинематических моделей механизмов.
Ядро сети связей имеет входную переменную
ay
V
&
и выходную
переменную
ax
V
&
. Для оболочки входной переменной является
переменная
ax
R
, а выходной переменной – переменная
ay
R
.
На основе сети связей, как и в предыдущем случае, записываем
реестр линейных алгебраических уравнений. Этот реестр является
продолжением реестра предыдущей подсистемы 2.

132
27 111 111
28 211
29 1 121 211
30 1 17
31 1 18
321 111101
331
1.3 () () 0,
2.1 ( ) 0,
2.3 () () 0,
1,
2,
1 ( ),
2.1
ax ax
Ray
ay ay
ay
Ray Rax Ray u
Rax
ax
UVT kkV
URT RkM
UT kkV
UДY
UДY
UM M MMMPk
UMTR
=® w×j+j×w-=
=® ×j-=
=w® w×j+j×w-=
=w® w=
=j® j=
= ® + - =-×j
=®
&
&&
&
&
&
&&
111
34 1 1 11
( ) 0,
1 0.
Rax
uu
kM
U M K MJ
×j-=
= ® - ×w=
&
(5.13)
Дифференциальные уравнения интегрирующих звеньев
подсистемы 1 имеют следующий вид:
1 1 7 29
1 1 8 30
,
.
p pYU
p pYU
w=w=
j =-w =-
&
(5.14)
Коэффициенты трансформаторов электрической схемы.
01 18
11 18
21 18
11 11 87 217
21 11 87 117
11
( ) cos cos ,
22
() sin sin,
( ) cos cos ,
( ) cos cos ( ) ,
( ) sin sin ( ) .
k r rY
k r rY
k r rY
k r rYYkY
k r rYYkY
j=×× j=××
j=× j=×
j=× j=×
j =- × j ×w =- × × =- j ×
j=× j×w=× × = j×
&
&
Матрица коэффициентов системы линейных уравнений для
первой подсистемы.
27,29 1 1 27,30 1 1 27,27
28,28 2 1 28,32
29,29 2 1 29,30 2 1 29,26
(), (), 1,
( ), 1,
( ), ( ), 1,
akaka
aka
akaka
= j = j =-
= j =-
=j =j =-
&
&
133
30,30
31,31
32,33 32,32 32,34
33,25 1 1 33,33
34,34 34,29 1
1,
1,
1, 1, 1,
( ), 1,
1,.
a
a
aaa
aka
a aJ
=
=
= = =-
= j =-
= =-
(5.15)
Вектор свободных членов системы линейных уравнений.
307
318
32 101
34
,
,
( ),
0.
BY
BY
B Pk
B
=
=
=-×j
=
(5.16)
При программировании задачи надо объединить одноименные
группы параметров отдельных подсистем: реестры уравнений (5.5,
5.9, 5.13), матрицы коэффициентов (5.7, 5.11, 5.15), векторы
свободных членов (5.8, 5.12, 5.16) и дифференциальные уравнения
интегрирующих звеньев (5.6, 5.10, 5.14).
Выберем значения исходных параметров модели:
1 2 12
22
11 22
0.03
0.1, , 10, 20, 1, 2,
2
, , 0.05.
33
r l P P mm
rl
JmJmR
== = = ==
=× =×=
Зададим начальные условия для решения системы
дифференциальных уравнений.
12346281
0, 0, , 0, , .
63
b b bx by
YXYYYVkYVYY
pp
=========j= =j=
Далее вычисляем начальные значения коэффициентов передачи
трансформаторов.
134
12 26
22 26
11 18
21 18
( ) sin sin ,
( ) cos cos ,
( ) sin sin ,
( ) cos cos .
k l lY
k l lY
k r rY
k r rY
j =× j=×
j =× j=×
j=× j=×
j=× j=×
Теперь определим начальные значения угловых скоростей
1
w
и
2
w
. Значения этих скоростей можно найти, если численно решить
систему линейных алгебраических уравнений, которые составляют
ядра в сетях связей первой и второй подсистем. В данном случае
рассматриваемая система линейных уравнений достаточно проста и
поэтому имеет аналитическое решение.
21 11
2
12 21 11 21
22 12
1
12 21 11 21
() ()
1
,
2 () () () ()
() ()
.
()() ()()
bx by
bx by
kVkV
kk kk
k VkV
k k kk
j× + j×
w=×
j×j+j×j
j× - j×
w=
j×j+j×j
Ниже будет рассмотрена методика построения кинематических
моделей, которые позволяют вычислять линейные и угловые
скорости всех звеньев механизма при помощи компьютера.
Присваиваем начальные значения найденных угловых скоростей
переменным
5
Y
и
7
Y
.
52
71
,
.
Y
Y
=w
=w
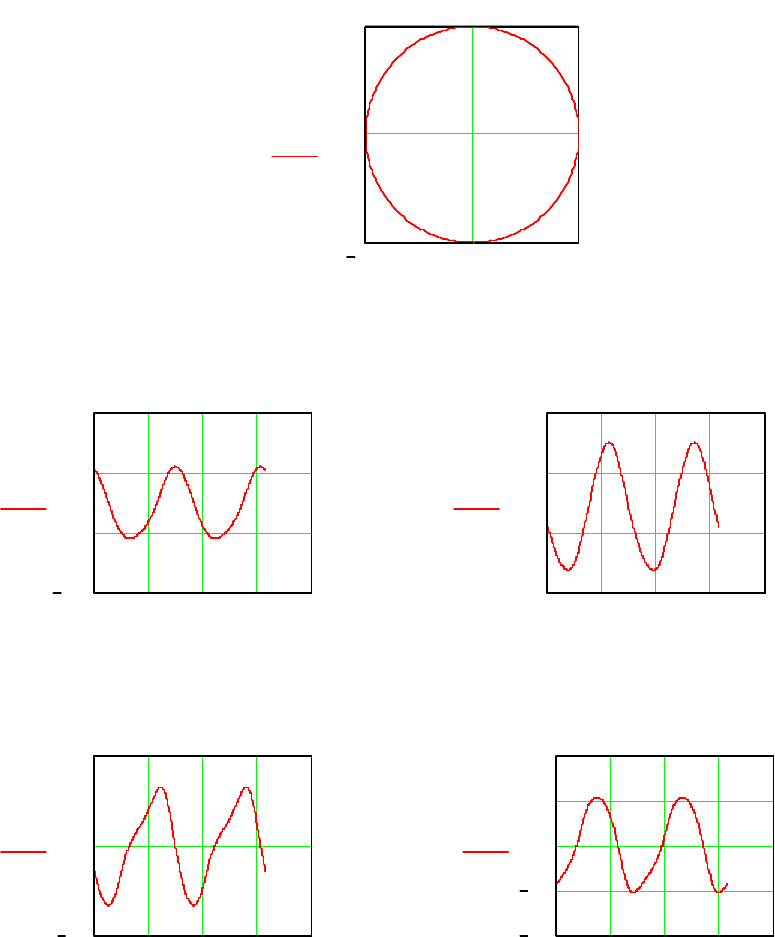
Результаты моделирования представлены в виде графиков на
рис.5.13 и на рис 5.14.
135
0.05 0 0.05
0
0.05
0.1
Yb
Xb
Рис. 5.13.
Рис. 5.14.
График на рис. 5.13 показывает ортогональное суммирование
двух движений,
b
X
и
b
Y
. Результирующее движение совершается по
расчетной траектории, т. е. по дуге окружности. На рис.5.14
представлены графики угловых скоростей
1
w
и
2
w
, а также угловых
положений
1
j
и
2
j
звеньев 1 и 2.
По заданному движению точки
b
, принадлежащей звену 2,
рассчитываются абсолютные угловые координаты звеньев.
Следовательно, построенная математическая модель решает
0 0.2 0.4 0.6 0.8
0.5
0
0.5
1
Fi2
Y6
t
0 0.2 0.4 0.6 0.8
0.5
1
1.5
2
Fi1
Y8
t
0 0.2 0.4 0.6 0.8
10
0
10
W2
Y5-
t
0 0.2 0.4 0.6 0.8
20
10
0
10
20
W1
Y7-
t
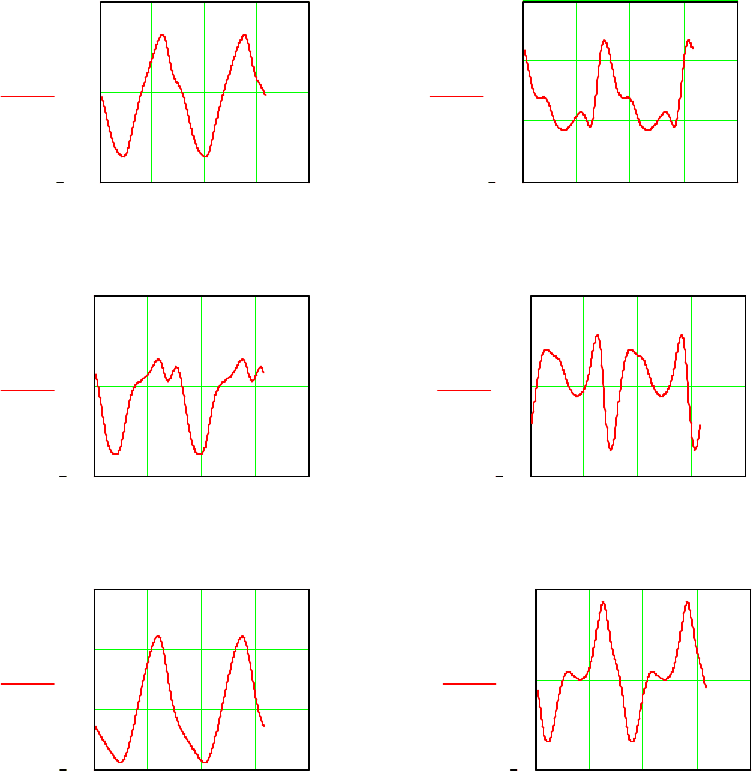
136
обратную задачу робототехники. Параллельно решается первая
задача динамики, когда движение механизма задано и находятся
силы, под действием которых происходит движение механизма.
Рассчитываются линейные и угловые скорости и ускорения звеньев,
значения сил в шарнирах, инерционные моменты и т.д. Общее
количество доступных для наблюдения параметров равно 34.
Графики на рис. 5.15 иллюстрируют динамику изменения некоторых
из них.
Рис. 5.15.
Таким образом, рассмотренная математическая модель – это
сложная динамическая модель. Она позволяет исследовать как
динамические, так и кинематические свойства механизма.
0 0.2 0.4 0.6 0.8
100
0
100
Rbx
U15
t
0 0.2 0.4 0.6 0.8
50
0
50
100
Rby
U9
t
0 0.2 0.4 0.6 0.8
50
0
50
Rax
U25
t
0 0.2 0.4 0.6 0.8
50
0
50
Ray
U28
t
0 0.2 0.4 0.6 0.8
20
0
20
40
dV2x/dt
U18
t
0 0.2 0.4 0.6 0.8
2
0
2
dV2y/dt
U10
t
137
5.2 Кинематическая модель робота в плоскости
Вернемся к предыдущей динамической модели упрощенного
манипуляционного робота (5.1). Сеть связей динамической модели
включает в себя два компонента: независимое ядро и окружающюю
ядро оболочку [18] (см. рис. 5.8 и рис.5.12). Ядро сети связей
образуют уравнения, которые связывают между собой потоковые
переменные (токи и производные токов). Эти уравнения не зависят от
потенциальных переменных (напряжений и э. д. с.) и представляют
собой самостоятельную кинематическую модель. Оболочка,
включающая уравнения для потенциальных переменных, т. е.
напряжений и э. д. с., дополняет кинематическую модель и
превращает ее в динамическую модель. Таким образом, ядро модели
определяет кинематические соотношения механизма, а оболочка его
динамические свойства.
Если от математической модели ожидают получить только
кинематические зависимости, а динамические характеристики
объекта не нужны, то можно ограничиться более простой
кинематической моделью. Для этого достаточно в исходной
динамической модели отбросить оболочку и оставить ядро. В ядре
производные токов надо заменить токами.
Чтобы показать методику таких преобразований, решим снова
обратную позиционную задачу робототехники с использованием
лишь одной кинематической модели.
Задающая подсистема
Поскольку инерционные компоненты в кинематической модели
отсутствуют, то производные токов можно не вычислять. Поэтому
дифференциальные уравнения (4) в кинематической модели не
используются, а остаются лишь уравнения (3).
1) ( ),
2).
b
b bx
b
b by
dX
k
D RYV
dtR
dY k
D XV
dtR
=×-=
=×=
138
Все эквивалентные электрические схемы замещения для
кинематической модели и для динамической модели совпадают.
Карты токов для этих моделей отличаются лишь тем, что в картах
токов для кинематической модели вместо ускорений токов
используются токи.
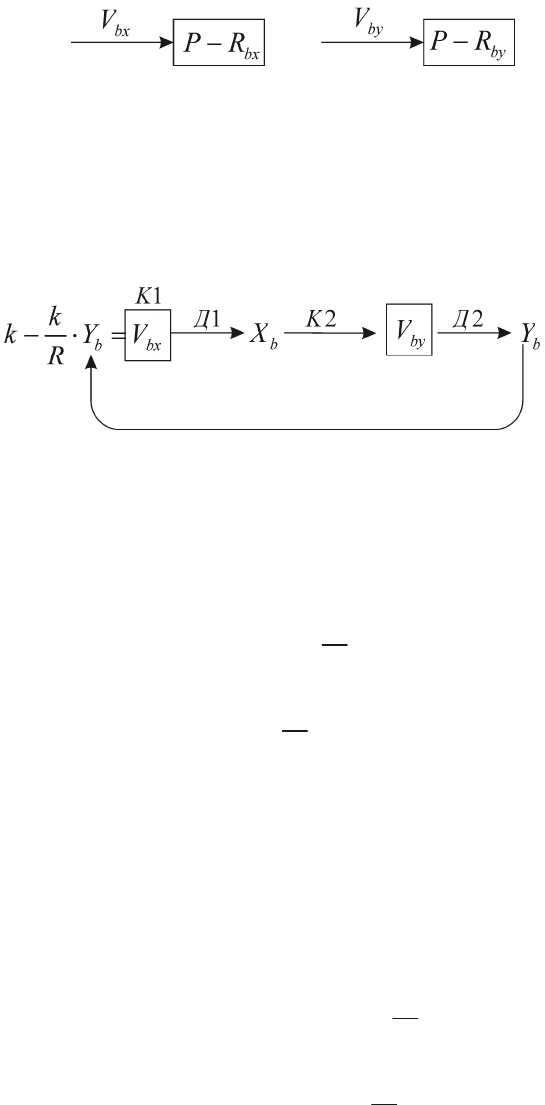
На рис. 5.16 представлена карта токов задающей подсистемы
кинематической модели.
Рис. 5.16
Сеть связей задающей подсистемы упрощается, поскольку не
содержит производных токов (рис. 5.17).
Рис.5.17
Запишем компонентные уравнения, которые используются в
задающей подсистеме.
1),
2).
b bx
b by
k
Kk YV
R
k
K XV
R
-×=
×=
Составляем реестр уравнений задающей подсистемы.
11
22
3
4
1,
2,
1,
2 0.
bb
bb
bx b bx
by b by
UX Д XY
U Y Д YY
k
UVK YVk
R
k
UV K XV
R
=®=
=®=
= ® - × - =-
=® ×-=

139
Дифференциальные уравнения интегрирующих звеньев
задающей подсистемы:
13
24
,
.
b bx
b by
pX V pY U
pY V pY U
==
==
Матрица коэффициентов системы линейных алгебраических
уравнений:
1,1
2,2
3,2 3,3
4,1 4,4
1,
1,
, 1,
, 1.
a
a
k
aa
R
k
aa
R
=
=
=- =-
= =-
Вектор свободных членов задающей подсистемы.
11
22
3
,
,
.
BY
BY
Bk
=
=
=-
Подсистема 2
Уравнения Кирхгофа для кинематической модели не содержат
производных токов. Для подсистемы 2 эти уравнения имеют
следующий вид:
2
2
2
2
2
2
2
2
1.1) 0,
2.1) 0,
3.1) 0,
4.1) 0.
xaxax
x bx bx
y ay ay
y by by
Kp VVV
Kp VVV
Kp V VV
Kp V VV
w
w
w
w
--=
-+=
+-=
-+=
Уравнения трансформаторов определяют зависимости только
между токами, протекающими через эти обмотки.