Чикуров Н.Г. Алгоритмическое и программное обеспечение компьютерных систем управления
Подождите немного. Документ загружается.

140
2
212
2
212
2
222
2
222
1.2) ( ) ,
2.2) ( ) ,
3.2) ( ) ,
4.2) ( ) .
ax
bx
ay
by
T kV
T kV
T kV
T kV
w
w
w
w
w× j=
w× j=
w× j=
w× j=
Подсистема 2 кинематической модели содержит одно
дифференциальное уравнение.
22
1).
Dp
j = -w
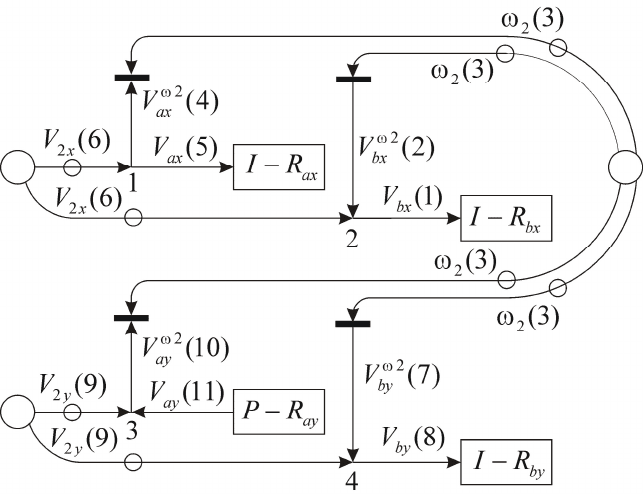
Изображение карты токов подсистемы 2 совпадает с
изображением аналогичной карты токов для динамической модели.
Однако обозначения производных токов на этой карте заменены
обозначениями токов (рис. 18).
Рис. 5.18.
141
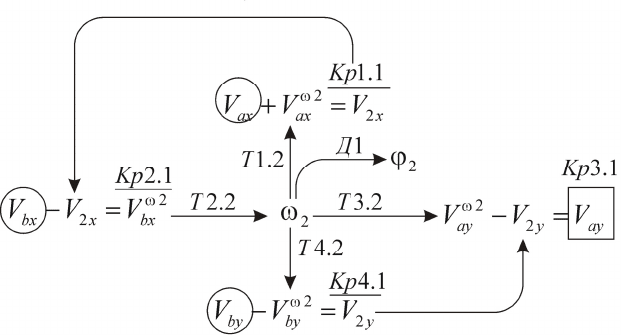
Сеть связей подсистемы 2 кинематической модели представляет
собой ядро сети связей динамической модели (рис. 5.19).
Рис. 5.19.
Далее на основании сети связей записываем, как и ранее, реестр
уравнений подсистемы 2.
5 2 23
2
622
22
72
2
822
22
9 212
2
10 2 212
22
11 222
12
1,
1.1 0,
2.1 0,
4.1 0,
1.2 ( ) 0,
2.2 ( ) 0,
3.2 ( ) 0,
x xaxax
bx x bx bx
y y by by
ax ax
bx
ay ay
by
U ДY
UV Kp VVV
UV Kp VVV
UV Kp V VV
UVT kV
U T kV
UVT kV
UV
w
ww
w
ww
w
ww
w
=j® j=
=® --=
=® -+=
=® -+=
=® w×j-=
=w® w×j-=
=® w×j-=
=
22
222
2
132
14
4.2 ( ) 0,
3.1 0,
____________________________________
?
by
ay y ay ay
ax
T kV
U V Kp V VV
UV
w
w
® w×j-=
=® +-=
=®
Дифференциальное уравнение интегрирующего звена.
2 2 3 10
.
p pYU
j =-w =-
142
Коэффициенты трансформаторов подсистемы 2.
12 23
22 23
( ) sin sin ,
( ) cos cos .
k l lY
k l lY
j =× j=×
j =× j=×
Матрица коэффициентов системы линейных алгебраических
уравнений.
5,5
6,6 6,14 6,9
7,6 7,3 7,7
8,8 8,4 8,12
9,10 1 2 9,9
10,10 1 2 10,7
11,10 2 2 11,11
2,10 2 2 12,12
13,8 13,13 13,11
1,
1, 1, 1,
1, 1, 1,
1, 1, 1,
( ), 1,
( ), 1,
( ), 1,
( ), 1,
1, 1, 1.
a
aaa
aaa
aaa
aka
aka
aka
aka
aaa
=
= =- =-
==-=
==-=
= j =-
= j =-
= j =-
= j =-
= = =-
Вектор свободных членов системы линейных алгебраических
уравнений.
53
.
BY
=
Подсистема 1
Уравнения трансформаторов включают только соотношения
токов.
111
121
1.2) ( ) ,
2.2) ( ) .
ax
ay
T kV
T kV
w× j=
w× j=
143
Дифференциальное уравнение интегрирующего звена
подсистемы 1:
11
1).
Dp
j =w
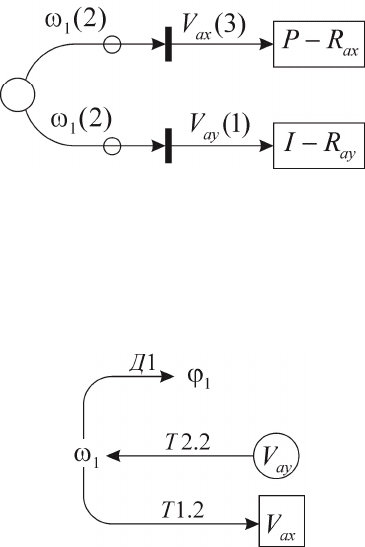
Карта токов подсистемы 1 кинематической модели (рис. 20).
Рис. 5.20
Сеть связей (рис. 5.21).
Рис. 5.21
Реестр уравнений подсистемы 1.
14 111
15 1 121
16 1 14
1.2 ( ) 0,
2.2 ( ) 0,
1.
ax ax
ay
UVT kV
U T kV
UDY
=® w×j-=
=w® w×j-=
=j® j=
Дифференциальное уравнение подсистемы 1.
1 1 4 15
.
p pYU
j =-w =-

144
Коэффициенты трансформаторов.
11 14
21 14
( ) sin sin ,
( ) cos cos .
k r rY
k r rY
j=× j=×
j=× j=×
Матрица коэффициентов системы линейных алгебраических
уравнений.
14,15 1 1 14,14
15,15 2 1 15,13
16,16
( ), 1,
( ), 1,
1.
aka
aka
a
= j =-
= j =-
=
Вектор свободных членов системы линейных алгебраических
уравнений:
164
.
BY
=
Исходные параметры кинематической модели примем равными
исходным параметрам динамической модели.
Начальные условия для решения системы дифференциальных
уравнений имеют следующий вид:
1 2 32 41
0, 0, , .
36
bb
YXYYYY
pp
= = = = =j = =j =
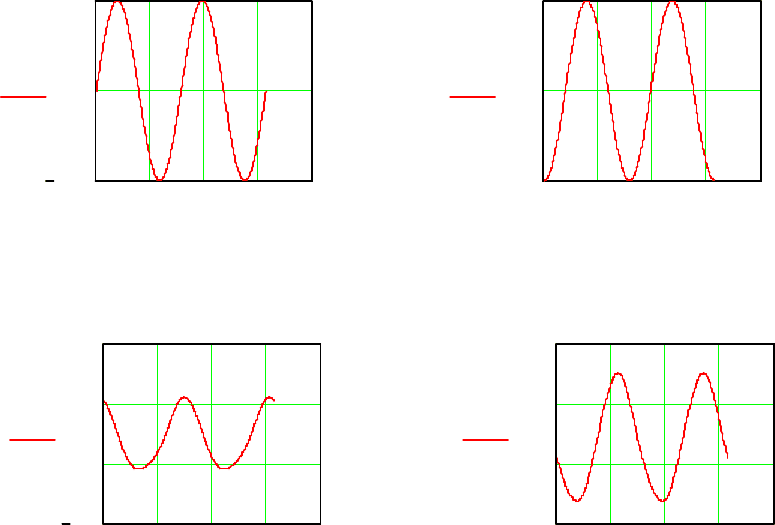
На рис. 5.22 показаны графики изменения переменных,
полученные в результате моделирования кинематической модели.
Эти графики совпадают с аналогичными графиками, полученными в
процессе моделирования динамической модели. Следовательно,
построенная кинематическая модель решает обратную позиционную
задачу робототехники подобно тому, как эту задачу решает
динамическая модель.
По существу кинематическая модель является упрощенной
копией динамической модели, но в отличие от нее может решать
лишь кинематические задачи. Напомним, что с помощью
кинематической модели вычисляются начальные условия для
145
решения дифференциальных уравнений динамической модели. В
этом отношении кинематическую модель можно рассматривать как
важное приложение к динамической модели.
Рис. 5.22.
0 0.2 0.4 0.6 0.8
0.05
0
0.05
Xb
Y1
t
0 0.2 0.4 0.6 0.8
0
0.05
0.1
Yb
Y2
t
0 0.2 0.4 0.6 0.8
0.5
0
0.5
1
Fi2
Y3
t
0 0.2 0.4 0.6 0.8
0.5
1
1.5
2
Fi1
Y4
t
146
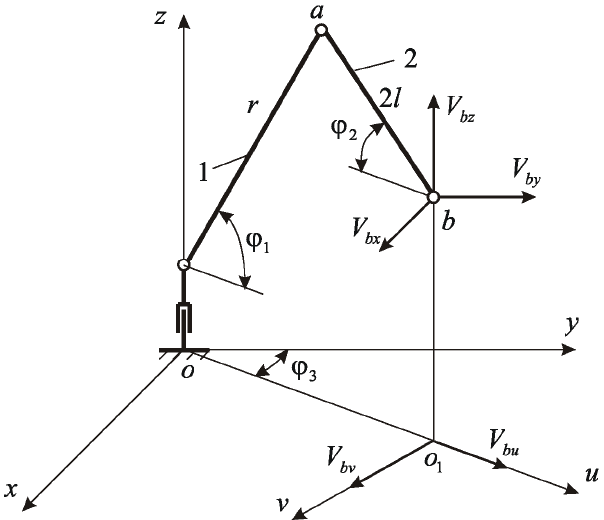
5.3 Кинематическая модель манипуляционного
робота в 3-мерном пространстве
Рассмотрим движение предыдущего двухзвенного механизма в
3-мерном пространстве
Oxyz
(рис. 5.23).
Рис. 5.23
Ориентация звеньев механизма в пространстве определяется
тремя углами:
12
,
jj
и
3
j
Решение обратной позиционной задачи
сводится к определению угловых положений
12
,
jj
,
3
j
и угловых
скоростей
123
,,
www
звеньев при заданном положении
,,
b bb
xyz
и
заданных скоростях
,,
bx by bz
VVV
точки
b
на конце звена 2.
Введем в координатной плоскости
Oxy
подвижную систему
координат
1
O uv
. Ось
u
совпадает с проекциями звеньев
oa
и
ab
на
координатную плоскость
Oxy
, а ось
v
ортогональна оси
u
.
Составляющие вектора скорости точки
b
вдоль осей
u
и
v
определяются скалярными произведениями векторов.
0
0
( ),
( ),
bu bx by
bv bx by
V
V
=+×
=+×
VVu
VVv
(5.17)
147
где
(
)
( )
( )
( )
0 33
0 33
sin,cos,
cos,sin,
,0,
0,.
T
T
T
bx bx
T
by by
V
V
=jj
= j-j
=
=
u
u
V
V
Пусть траекторией, по которой движется точка
b
, будет
окружность, ориентированная произвольно в системе координат
Oxyz
. Направления скоростей
,,
bx by bz
VVV
соответствуют движению
точки
b
из начальной точки дуги. Источником движения точки
b
по
заданной траектории является задающая подсистема. Рассмотрим ее
структуру.
Задающая подсистема
Система дифференциальных уравнений окружности,
ориентированной произвольно в пространстве, имеет следующий
вид:
[ ]
[ ]
[ ]
1) ( )( ),
2) ( )( ),
3) ( )( ),
b
b c b c bx
b
b c b c by
b
b c b c bz
dx k
D BzzCyyV
dtR
dy
k
D CxxAzzV
dtR
dz
k
D Ay y Bx x V
dtR
= -- -=
= -- -=
= -- -=
где
,,
ABC
– направляющие косинусы нормали к плоскости, в
которой лежит окружность,
,,
c cc
xyz
– координаты центра окружности.
Выделим из системы дифференциальных уравнений
компонентные уравнения.
148
( ) ( )
( )( )
( )( )
1),
2),
3).
bx bc bc
by bc bc
bx bc bc
k
KV Bzz Cyy
R
k
KV Cxx Azz
R
k
KV Ayy Bxx
R
= ---
éù
ëû
= ---
éù
ëû
= ---
éù
ëû
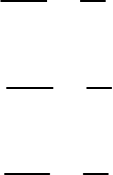
Чтобы построить эквивалентную электрическую схему
замещения задающей подсистемы, перепишем векторные уравнения
(5.17) в скалярном виде.
3 3 13 23
3 3 23 13
4) sin cos () (),
5) cos sin ( ) ( ),
bu bx by bx by
bv bx by bx by
K V V V Vk Vk
K V V V Vk Vk
= j+ j=j+j
= j- j=j-j
где
133233
()sin, ()cos.
kk
j= j j= j
С учетом этих уравнений электрическая схема замещения
задающей подсистемы принимает следующий вид (рис. 24).
Рис. 5 24
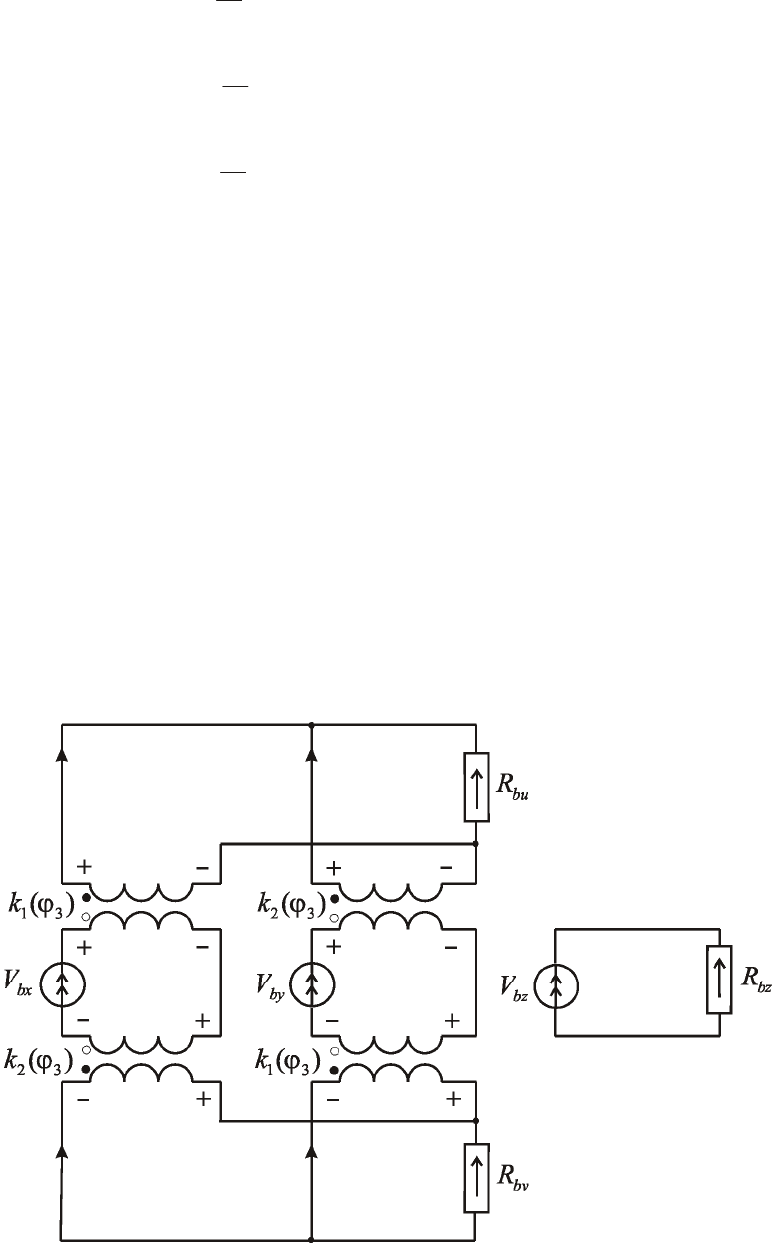
149
Карта токов (рис.5.25) содержит три приемника токов
,
bu bv
PRPR
--
и
bz
PR
-
.
Рис. 5 25
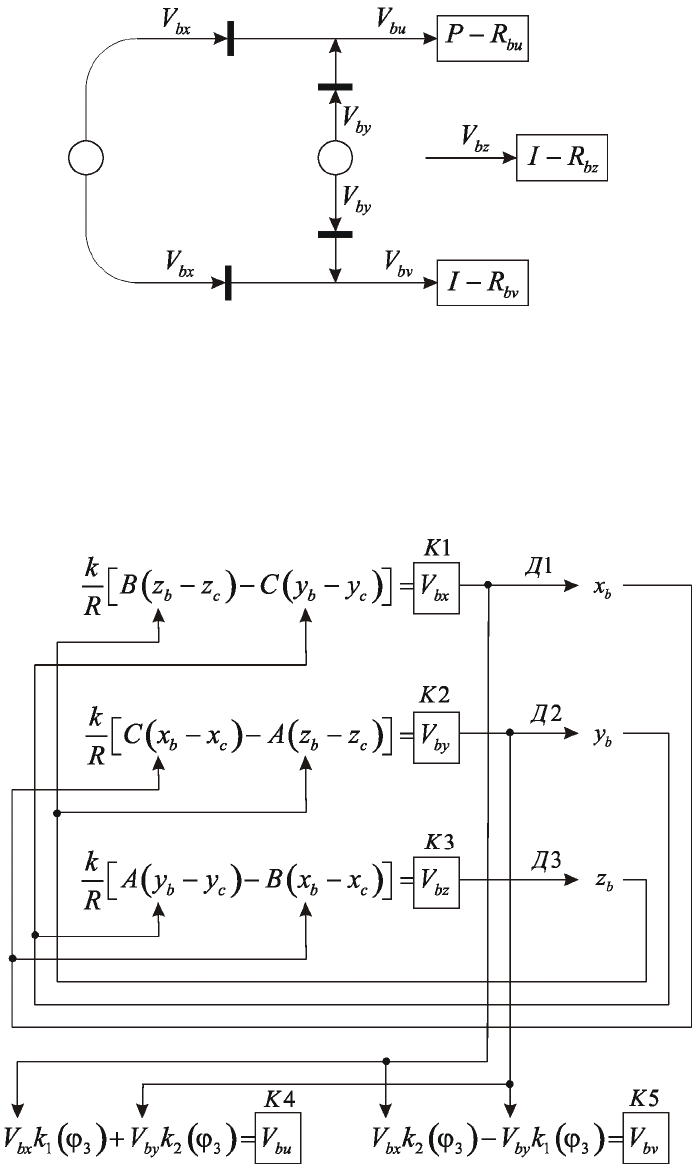
Сеть связей задающей подсистемы (рис.5.26) содержит три
выходные переменные
,
bx by
VV
и
bu
V
.
Рис.5.26