Чикуров Н.Г. Алгоритмическое и программное обеспечение компьютерных систем управления
Подождите немного. Документ загружается.

110
Регулятор обратной связи по э. д. с.
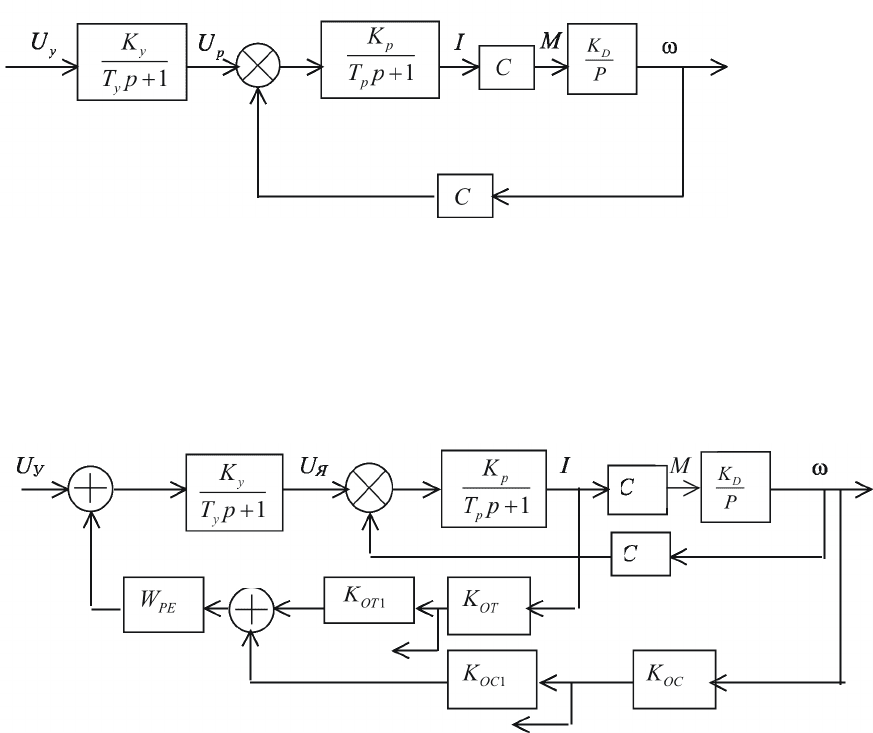
Чтобы исключить вредное влияние э. д. с. на ток якоря, введем в
СУ регулятор обратной связи по э. д. с.. Рассмотрим силовую часть
электропривода без учета внешней нагрузки (рис.4.19).
Рис.4.19.
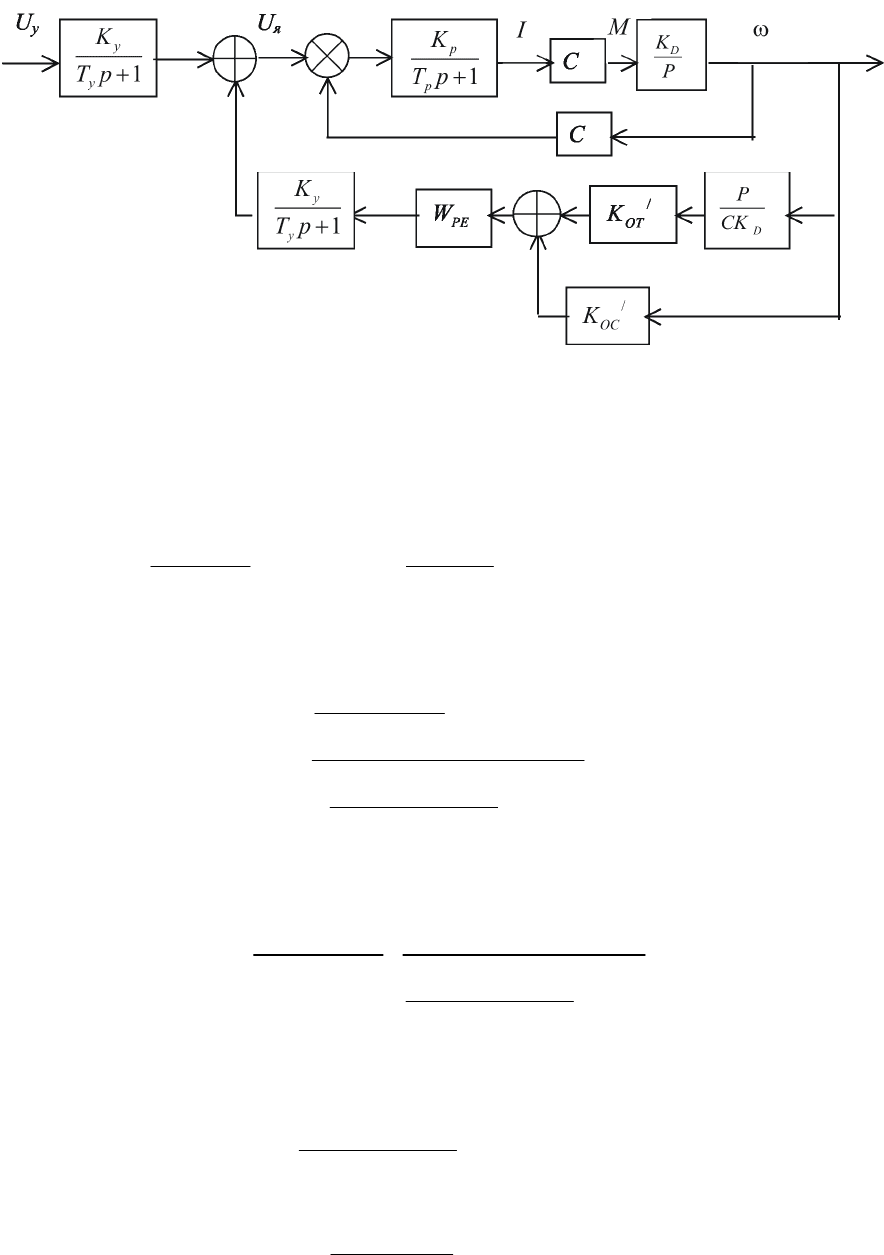
Вводим регулятор обратной связи по э. д. с. W
PE
(рис.4.20). На
его вход подадим сумму сигналов тока I и скорости w.
Рис.4.20
Поставим задачу выбрать структуру регулятора W
PE
так, чтобы
исключить вредное влияние э. д. с. на ток якоря. Обозначим для
краткости:
/
1
OC OC OC
K KK
=×;
/
1
OT OT OT
K KK
=×.
Выполним эквивалентное преобразование структурной схемы на
рис.4.20.
111
Рис.4.21
Из рис.4.21 очевидно условие компенсации влияния ЭДС на ток
якоря.
//
1
У
pе OT OC
У
KP
WK KC
T P C Kд
æö
×+=
ç÷
+×
èø
,
откуда:
/
/
/
( 1)
1
У
У OC
pе
OT
OC д
С
TP
KK
W
K
P
K CK
×+
×
=
+
××
,
или:
/
/
/
( 1)
1
У
pе
OT
У OC
OC д
C TP
W
K
KK
P
K CK
+
=×
×
+
××
.
Примем
/
/
OT
У
OC д
K
T
K CK
=
××
,
тогда
/
pep
е
У OC
С
WK
KK
==
×
,
чему соответствует схема на рис. 4.22.

112
Рис.4.22
Зададимся значением Кос
/
=С, тогда
1OC
OC
С
K
K
= ;
1
pе
У
K
K
= ;
2
1
Уд
OT
OT
TСK
K
K
××
= .
Имитационное моделирование электропривода на компьютере
показывает, что переходные характеристики тока (рис.4.23, а) и
частоты вращения (рис.4.23, б) монотонные, без перерегулирования.
0 0.013 0.025 0.038 0.05
0
25
50
75
100
I
k
t
k
0 0.013 0.025 0.038 0.05
0
7.5
15
22.5
30
w
k
t
k
а б
Рис.4.23. Переходные характеристики электропривода:
а – тока; б – частоты вращения
Шумы квантования входного сигнала и сигнала обратной связи
слабо влияют на качество управления. Это объясняется тем, что в
отличие от ПИД-регуляторов, в которых указанные сигналы
подвергаются «жесткому» дифференцированию (в смысле малости
постоянной времени дифференцирующего звена), в регуляторах на
основе предикаторов операция дифференцирования осуществляется
«мягко» и распределена в регуляторе в соответствии с количеством и
К
PE
W
PE
113
последовательностью размещения инерционных элементов в объекте
управления.
Реальные параметры объекта управления не могут точно
отвечать заданной настройке регулятора. Чувствительность системы
к изменению параметров объекта управления (робастность), даже
при настройке регулятора на весьма малые постоянные времени
(T
A
=T
V
=T
I
=0,001с), не вызывает больших перерегулирований. Таким
образом, рассмотренная система управления достаточно инвариантна
(робастна) к изменяющимся параметрам объекта.
Контрольные вопросы
1. Почему регуляторы положения приводов подач строят в виде
цифровых ПИ-регуляторов?
2. Нарисуйте схему регулятора положения. Объясните ее состав и
назначение каждого компонента.
3. Как в регуляторе положения вычисляется ошибка по скорости и
ошибка по положению?
4. Как в регуляторе положения исключить ошибку по положению
в установившемся режиме (создать астатический регулятор)?
5. Объясните принцип действия предикатора.
6. Как настроить контур тока и контур скорости в цифровой
системе управления следящим электроприводом на основе
предикаторов?
7. Как построить астатический регулятор положения на основе
предикаторов?
8. Выполните преобразования структурной схемы и выведите
формулы для настройки регулятора обратной связи по э. д. с.
114
5. УПРАВЛЕНИЕ МАНИПУЛЯЦИОННЫМИ
РОБОТАМИ
Ключевые слова:
Ведущее звено, вектор свободных членов, задающая
подсистема, идеальный трансформатор, источник тока, карта
токов, кинематическая модель робота, компонентные уравнения,
манипуляционный робот, обобщенные координаты механизма,
оболочка сети связей, обратная позиционная задача робототехники,
приемник токов, реестр уравнений, сеть связей, уравнение
равновесия моментов, уравнения Кирхгофа, уравнения равновесия
сил, уравнения трансформаторов, эквивалентная электрическая
схема замещения, электрические биполярные разъемы, ядро сети
связей
5.1 Обратная позиционная задача робототехники
Обратную позиционную задачу для манипуляционных роботов
можно сформулировать так: При заданном положении и ориентации
конечного звена механизма
S
найти обобщенные координаты
механизма
12
(,,)
T
n
qqq
=q
K
.
Если обозначить
( ),
=
S fq
(5.1)
то искомые координаты можно выразить соотношением
( ).
-
=
1
qfS
При такой постановке задачи ее решение сводится в общем
случае к решению нелинейной тригонометрической системы
уравнений.
Решение обратной позиционной задачи необходимо для
управления манипулятором. Действительно, если программное
движение манипулятора задано в виде траектории его схвата
()
t
S
, то
для управления сочленениями необходимо обеспечить такие
115
значения
()
t
q
, чтобы в каждый момент времени выполнялось
соотношение (5.1).
Общего аналитического решения этой задачи не существует, а
применение численных методов решения сопряжено с рядом
трудностей, связанных с возможной расходимостью
соответствующих итерационных схем [9].
Изучим возможность решения обратной позиционной задачи с
использованием метода электроаналогий [18]. В качестве примера
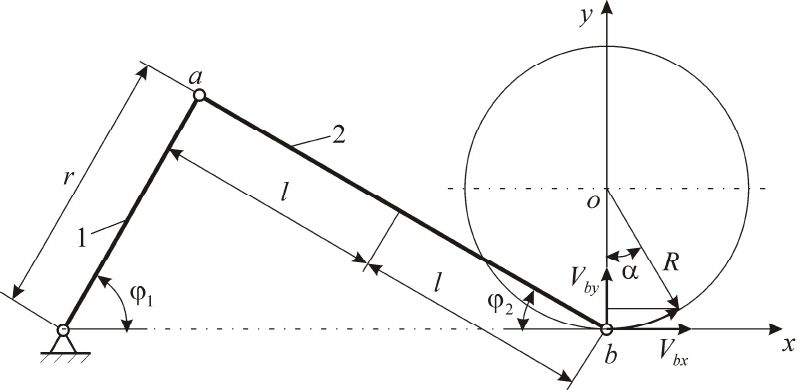
рассмотрим простейший двухзвенный механизм (рис.5.1).
Точка
b
звена 2 движется по заданной траектории с
определенной скоростью. Требуется определить угловые положения
1
j
и
2
j
звеньев, их скорости и ускорения, а также внутренние силы
реакций в шарнирах.
Рис. 5.1
Пусть траекторией, по которой движется точка
b
, будет
окружность, расположенная в координатной плоскости
xy
. Выберем
направление движения по окружности против направления вращения
часовой стрелки. Совместим начало отсчета системы координат
xy
с
точкой
b
звена 2. Направления векторов скоростей
bx
V
и
by
V
соответствуют движению точки
b
из начальной точки по дуге
окружности в направлении против вращения часовой стрелки.
Источником движения звена 2 будем считать некоторую
задающую подсистему, которая задает движение точки
b
. Физически
такое движение можно реализовать, приложив к точке
b
силу
b
R
.

116
Направление и модуль вектора этой силы должны изменяться в
зависимости от времени так, чтобы точка
b
двигалась по заданной
траектории с заданной скоростью.
Рассмотрим подробно структуру задающей подсистемы.
Задающая подсистема
Запишем систему уравнений окружности в параметрической
форме.
sin,
cos,
b
b
XR
Y RR
=×a
=-×a
где
b
X
,
b
Y
– координаты точки
b
в системе координат
xy
,
R
– радиус окружности,
a
– угловое положение радиус-вектора окружности.
Продифференцируем эти выражения.
cos,
sin.
b
b
dX
R
d
dY
R
d
=×a
a
=×a
a
Или
,
.
b
b
b
b
dX
RY
d
dY
X
d
a
a
=-
=
(5.2)
Заменим параметр
a
параметром
s
, где
s
– длина дуги
окружности. Тогда
.
ds Rd
= ×a
117
При движении с постоянной скоростью пройденный путь
пропорционален времени.
,
s kt
=×
где
k
– коэффициент пропорциональности.
Соответственно
.
k
d dt
R
a=×
В результате уравнения (5.2) примут вид:
1) ( ),
2).
b
b bx
b
b by
dX
k
D RYV
dtR
dY k
D XV
dtR
=×-=
=×=
(5.3)
Если движение вдоль контура происходит с переменной
скоростью, то коэффициент
k
следует заменить параметром
()
kt
.
Продифференцируем уравнения (5.3).
3),
4).
bxb
by bx
by
b
bx by
dV dY
kk
D VV
dt R dt R
dV
dXkk
D VV
dt R dt R
=-× =-×=
=× =× =
&
&
(5.4)
Выделим из системы уравнений компонентные уравнения.
1),
2).
bx by
by bx
k
KVV
R
k
KVV
R
=-×
=×
&
&
Эквивалентная электрическая схема замещения (рис. 5.2)
содержит два источника тока
bx
V
и
by
V
.
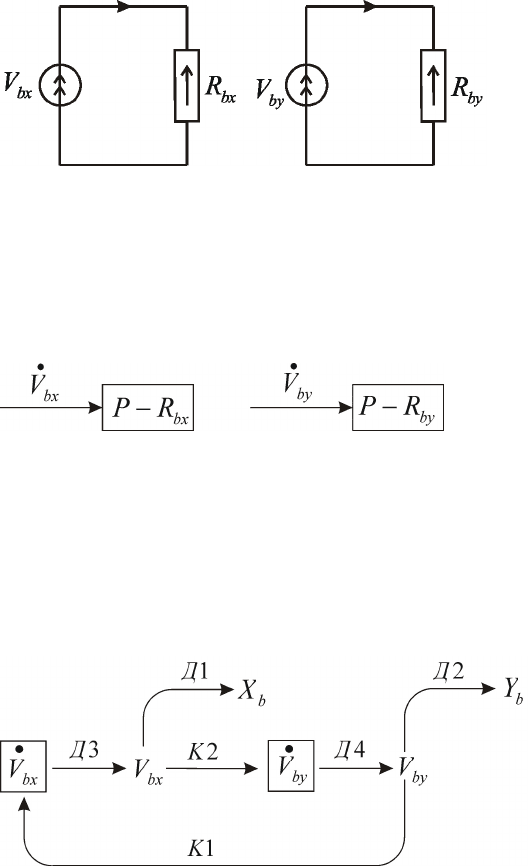
118
Рис. 5.2
Карта токов (рис. 5.3) содержит два приемника токов
bx
PR
-
и
by
PR
-
.
Рис. 5.3
Сеть связей задающей подсистемы (рис.5.4) содержит две
выходные переменные
bx
V
&
и
by
V
&
.
Рис. 5.4
Значения э. д. с.
bx
R
и
by
R
, вычисляемые в подсистеме 2,
задающей подсистемой не используются. Поэтому сеть связей этой
подсистемы не содержит входных переменных. С этой точки зрения
задающую подсистему можно рассматривать как генератор
управляющих воздействий, задающих движение механизма.
Переменные
b
X
,
b
Y
– информационные.
Ведущего звена в данном механизме нет. Его роль выполняет
движущаяся по дуге окружности точка
b
. Решение системы
дифференциальных уравнений (4) определяет скорости
bx
V
,
by
V
и
ускорения
,
bx by
VV
&&
этой точки по координатным осям
x
и
y
.

119
Составим реестр уравнений задающей подсистемы.
11
22
33
44
5
6
1,
2,
3,
4,
1 0,
2 0,
_________________________________
bb
bb
bx bx
by by
bx bx by
by by bx
UX D XY
U Y D YY
UV D VY
UV D VY
k
UVK VV
R
k
UVK VV
R
=®=
=®=
=®=
=®=
=® +×=
=® -×=
&&
&&
(5.5)
Дифференциальные уравнения звеньев.
13
24
35
46
,
,
,
.
b bx
b by
bx bx
by by
pX V pY U
pY V pY U
pV V pY U
pV V pY U
==
==
==
==
&
&
(5.6)
Далее в соответствии с ранее изученной методикой [18]
составляем матрицу коэффициентов системы линейных
алгебраических уравнений.
1,1
2,2
3,3
4,4
5,5 5,4
6,6 6,3
1,
1,
1,
1,
1,,
1,.
a
a
a
a
k
aa
R
k
aa
R
=
=
=
=
==
= =-
(5.7)