Чикуров Н.Г. Алгоритмическое и программное обеспечение компьютерных систем управления
Подождите немного. Документ загружается.


90
Через последовательный канал к ней подключены приводные
контроллеры, каждый из которых управляет приводом по одной
координате, и программируемые логические контроллеры
электроавтоматики (ПЛК).
Все приводные контроллеры идентичны. К каждому из них
подключены фотоэлектрический импульсный датчик, концевые и
аварийные выключатели и датчик фиксированной точки. Выходом
приводного контроллера является аналоговый или цифровой сигнал,
который управляет контуром скорости следящего электропривода.
Распределенная структура позволяет создавать различные
варианты компоновки СЧПУ и идеально подходит для управления
гибкими станочными системами. При этом приводные контроллеры и
контроллеры электроавтоматики могут быть смонтированы как в
шкафу с электрооборудованием, так и непосредственно на станке.
Небольшое число связующих кабелей и возможность установки
контроллеров в непосредственной близости к приводам, датчикам и
элементам электроавтоматики, а также цифровой характер
информации, передаваемой от главного компьютера, способствуют
повышению надежности СЧПУ и облегчению ее монтажа.
Создание описываемой СЧПУ стало возможным благодаря
разработке оригинального алгоритма микроинтерполяции, входящего
в состав программы управления приводного контроллера. Основной
интерполятор (макроинтерполятор), находящийся в главном
компьютере, выдает очередные приращения координат с периодом
20 мс. Эти приращения по последовательному каналу передаются в
приводные контроллеры, в каждом из которых имеется
микроинтерполятор, выдающий управляющие воздействия на
электропривод с периодом 1 мс. Таким образом обеспечивается
необходимая для качественной обработки деталей частота
управляющих воздействий на электропривод при низкой скорости
обмена информацией между главным компьютером и контроллерами.
В результате значительно снижаются требования к пропускной
способности канала. Кроме того, большой период времени (20 мс),
выделяемый для вычислений, позволяет решать достаточно сложные
задачи управления.
Микроинтерполяторы всех осей синхронизированы между
собой. Модули оперативного управления скоростью используются
для экстренного изменения скорости подач следящих
91
электроприводов, например, в случае аварии, для быстрого
изменения подачи при нарезании резьб резцом, при изменении
скорости подачи с пульта оператора, а также при организации
специальных самонастраивающихся режимов резания.
Принцип работы микроинтерполятора заключается в том, что в
процессе формообразования детали на станке воспроизводится
пространственная кривая, описываемая векторным уравнением
32
().
ssss
= + ++
P a b cd
где
P
– радиус-вектор;
s
– независимый параметр (
01
s
££
);
,,,
abcd
– векторы, определяемые из решения системы уравнений
(0)
==
P Ad
;
(1)
= =+++
P Babcd
;
(0)dd
ds ds
==
PA
c
;
(1)
32
dd
ds ds
= =++
PB
a bc
.
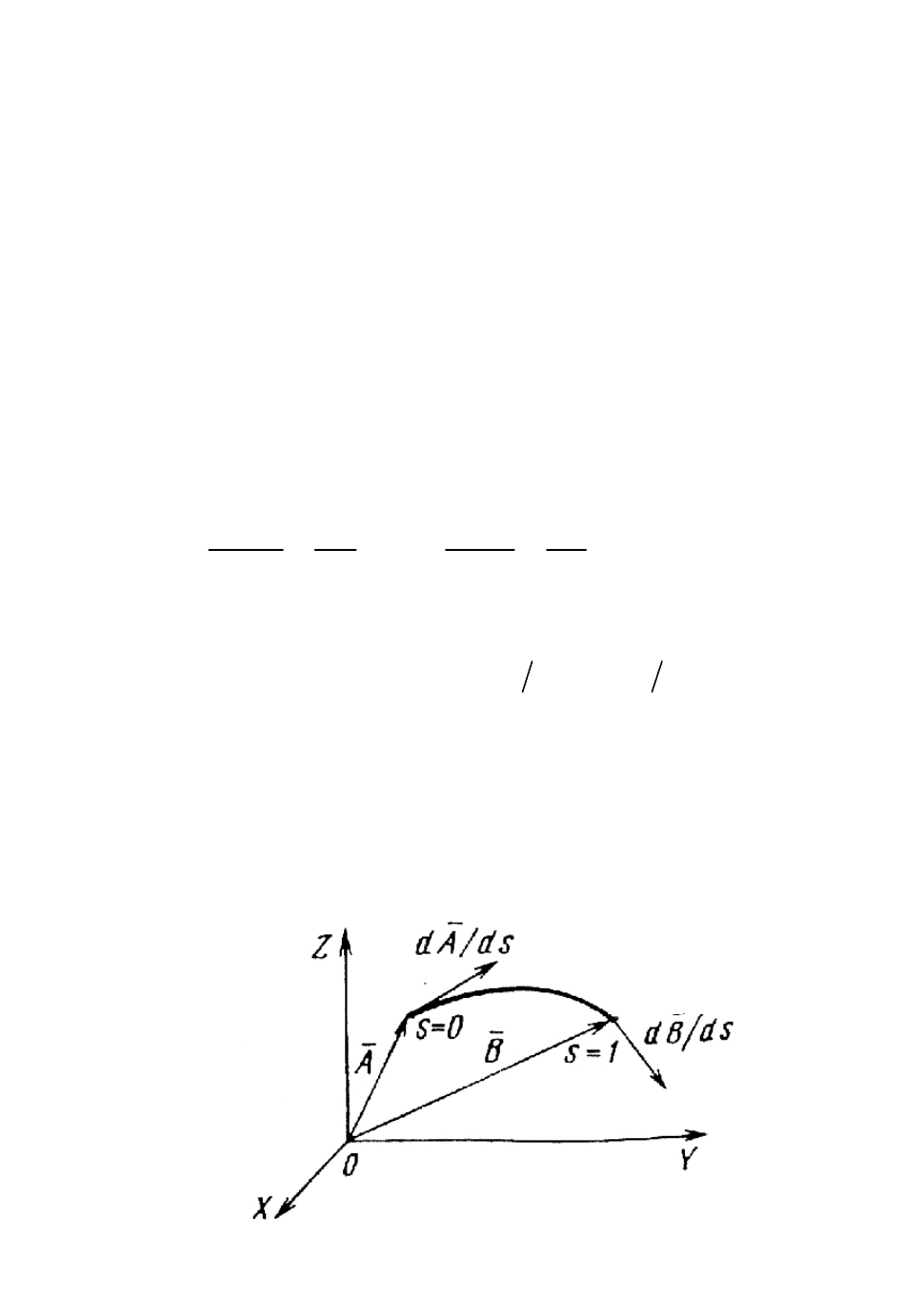
Таким образом, кривая, проходящая через две точки (рис. 3.22),
целиком задана величинами
A
,
B
,
d ds
A , и
d ds
B , где
A
– вектор
начала кривой;
B
– вектор конца кривой.
Эта кривая представляет собой отдельный сегмент кубического
параметрического сплайна. Используя последовательный ряд
аналогичных сегментов, можно построить составную кривую,
обеспечив ее непрерывность и гладкость.
Рис.3.22. Сегмент кубического параметрического сплайна
92
Для этого во всех точках сопряжения соседних сегментов
необходимо определить не только первую, но и вторую производную
радиус-вектора кривой. Поскольку вектор
P
является функцией
скалярного аргумента
s
, проекции вектора на координатные оси X, Y,
Z также являются функциями аргумента s.
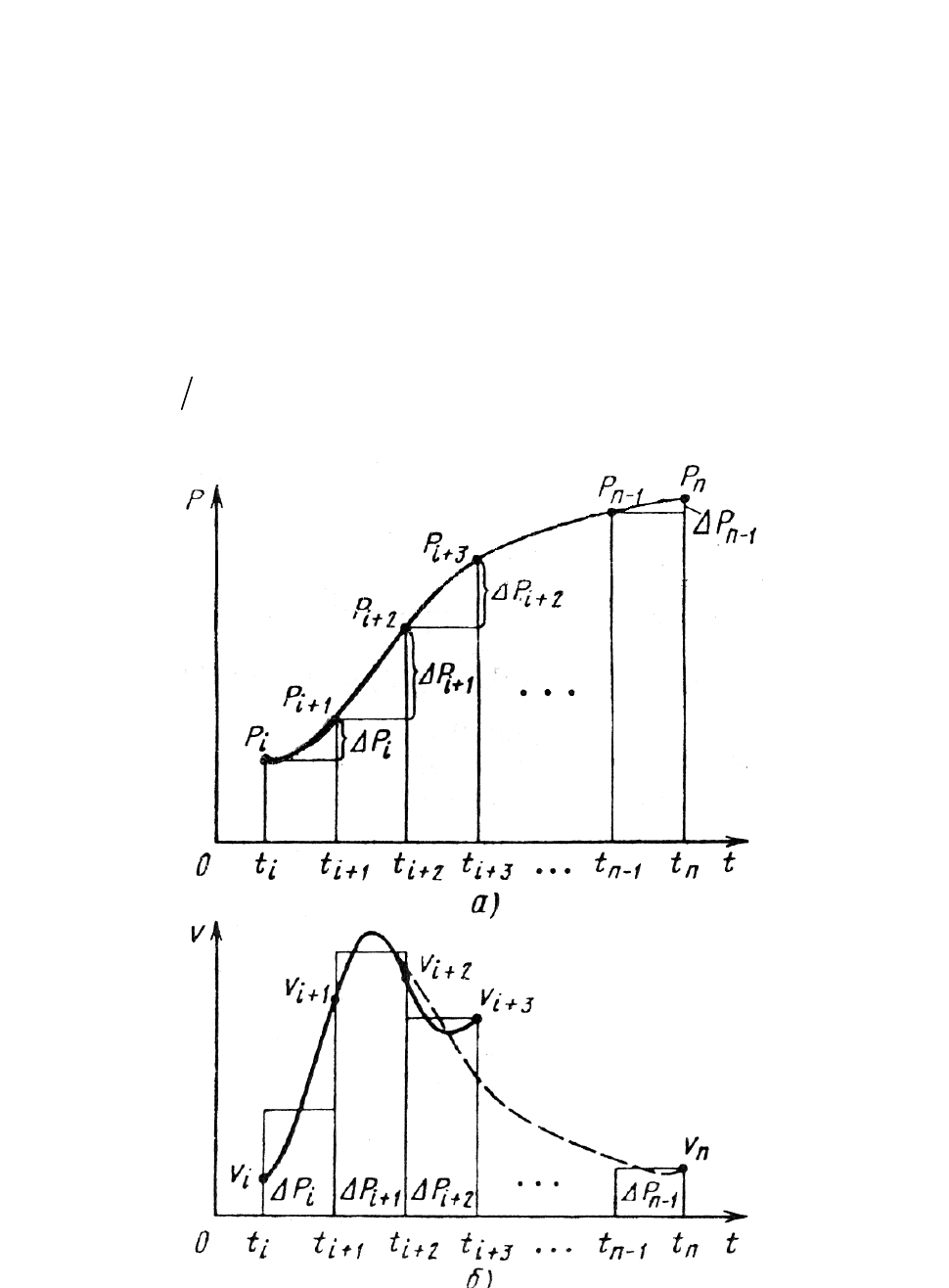
Рассмотрим в общем виде для любой из координат уравнение
сплайн-функции, проходящей через
n
заданных точек пути
Р (рис. 3.23, а), причем
32
(),
i i i ii
Ps as bs csd
= + ++
(3.7)
где
1
()()
iii
stttt
+
=--
;
i
a
,
i
b
,
i
c
,
i
d
– коэффициенты сплайн функции;
t
– текущее время;
0,1,...,
in
=
.
Рис.3.23. Аппроксимация с помощью сплайн-функции пути P (a) и
скорости
V
(б) (
t
– текущее время)
93
Граничные значения пути
12
, ,...,
iin
PPP
++
определяются
соответствующими приращениями
11
, ,...,
iin
PPP
+-
DDD
, поступающими
от макроинтерполятора. Задача микроинтерполяции заключается в
построении такой функции (3.7), которая проходила бы через
заданные точки пути и изменялась достаточно плавно, причем на
каждом i-м участке аппроксимации площадь, ограниченная кривой
контурной скорости
()
vt
и осью абсцисс, должна быть равна площади
прямоугольника
i
P
D
(рис. 3.23, б).
Продифференцировав дважды уравнение (3.7), получим
скорость
i
v
по данной координате и ускорение
i
w
, причем
2
32,
i i ii
v as bsc
= ++
(3.8)
6 2.
iii
w asb
=+
(3.9)
Для определения неизвестных коэффициентов
i
a
,
i
b
,
i
c
,
i
d
зададим краевые условия на концах
i
-го участка:
22
22
1 1.
(0) ; (0)
(0);(1);
(1) ; (1)
iiii
i ii ii
iiii
P P dP ds v
dP dswP PP
dP ds v d P ds w
++
==
ü
ï
= = +D
ý
ï
==
þ
(3.10)
Подставим граничные значения функций (3.7) – (3.9) на концах
i-го участка в уравнения (3.10):
1
1.
;;
;32;
2 ;62
i iiii i i i
ii i iii
iii ii
dPabcdPP
cv a bcv
bw a bw
+
+
= +++ =+D
ü
ï
= + +=
ý
ï
= +=
þ
(3.11)
В результате получена система линейных уравнений, в которой
число неизвестных
i
a
,
i
b
,
i
c
,
i
d
,
i
v
,
1
i
v
+
,
i
w
,
1
i
w
+
на два больше, чем
число уравнений. Чтобы решить эту систему, используем то
обстоятельство, что скорость в начале i-го участка равна скорости в
конце
( 1)
i
-
-го участка, т.е.
1
ii
vv
-
=
(в начале движения
1
0
ii
vv
-
==
).
94
Кроме того, примем допущение, что в каждый момент времени
i
t
аппроксимирующая сплайн-функция (3.7) может проходить не
через все участки пути, а лишь через некоторое их число
mn
£
,
причем скорость
im
v
+
в конце
()
im
+
-го участка пути равна
приращению
1
im
P
+-
D
пути на этом участке за единицу времени. Такое
допущение вносит в решение задачи погрешность, которая зависит от
числа т участков аппроксимации. С увеличением т погрешность
быстро уменьшается. Экспериментально установлено, что можно
принять
3
m
=
.
Распространим систему уравнений (3.11) на три участка
микроинтерполяции [i-й;
( 1)
i
+
-й;
( 2)
i
+
-й]. Решая систему (3.11) для
этих участков, находим
ii
dP
=
, а также
122
[11 3 (26 )/3]/5.
i i i i ii
b P P P cv
+++
=D-D+D-+
(3.12)
Аналогично можно найти коэффициенты
i
a
и
i
c
. Для
упрощения алгоритма вычислений расчет этих коэффициентов
проведем по рекуррентным формулам, вытекающим из уравнений
(3.11):
1 11
32;
.
i i ii
i iii
ca bc
a Pbc
- --
=++
ü
ý
=D--
þ
(3.13)
Кубический полином, определяющий приращения
микроинтерполяции, вычисляется по схеме Горнера:
[( ) ].
P as bs cs
= ++
(3.14)
Выходным сигналом микроинтерполятора является приращение
пути; поэтому абсолютная величина пути
i
P
до начала i-го участка
микроинтерполяции и соответствующий этому пути коэффициент
i
d
здесь приняты равными нулю.
Период времени, за который независимый параметр s
изменяется от 0 до 1, должен быть равен периоду работы
макроинтерполятора. Период работы микроинтерполятора (1 мс)
определяется приращением ∆s = 1/10.
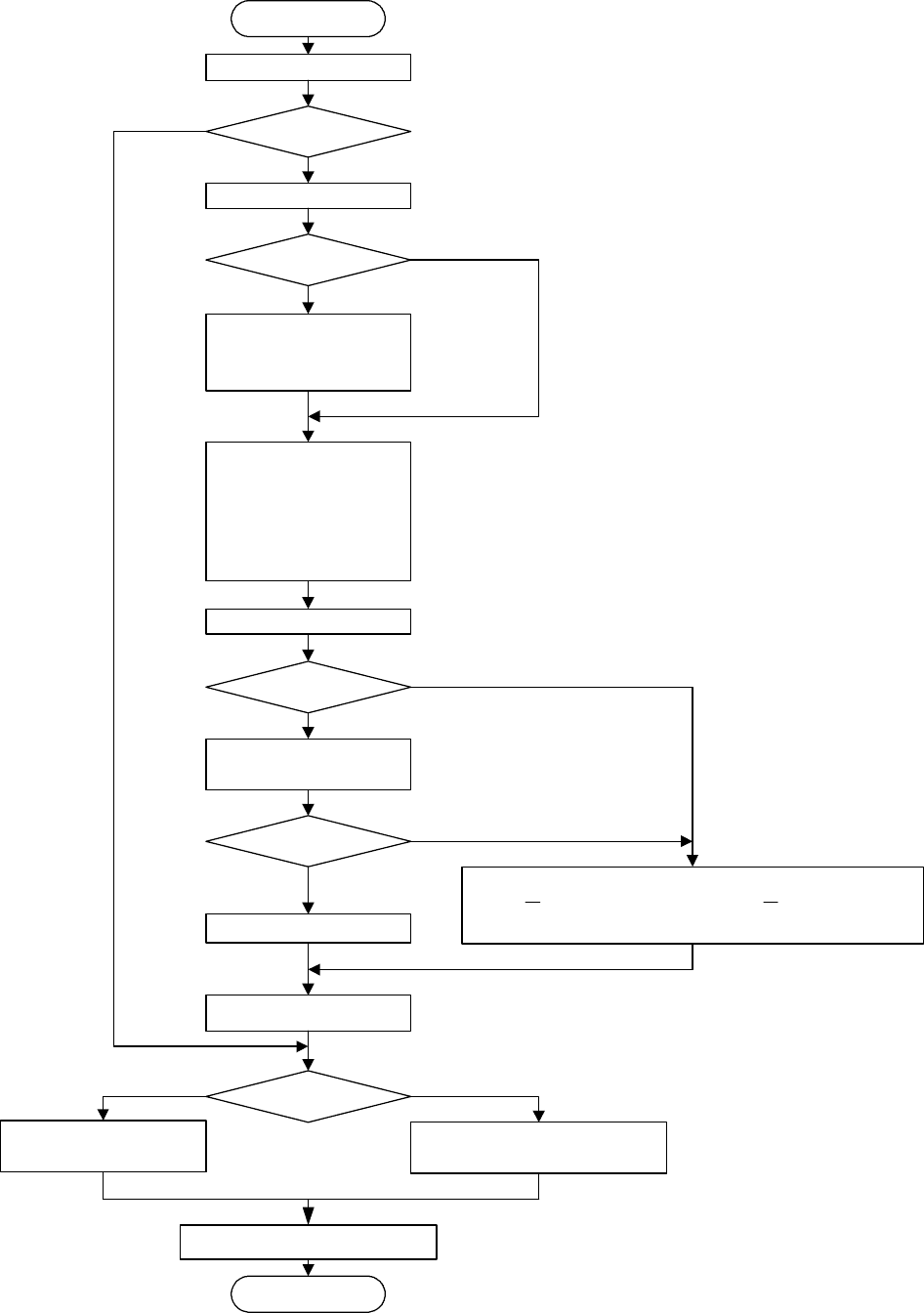
Алгоритм работы микроинтерполятора приведен на рис.3.24.
95
Да
Нет
Нет
Да
Нет
Да
Нет
Да
Нет
Да
Начало
SSS
= +D
1
S
>
1
SS
=-
3
n
=
0
START
=
0
STOP
=
0
n
=
12
PP
D =D
23
PP
D =D
3
i
PP
D =D
33
VP
=D
0
P
*
=
32
c a bc
=++
3
0
V
=
1
STOP
=
1
nn
=+
1
n
=
3
b ab
=+
1
a Pbc
=D--
( )
1233
11
11 3 26
53
b P P P cV
éù
=D-D+D-+
êú
ëû
(
)
P aS bS cS
= ++
éù
ëû
,
PPPPP
**
D=-=
Конец
0
P
=
0, 0, 0
abc
===
1
START
=
Рис.3.24. Блок-схема алгоритма
96
В состав микроинтерполятора входит модуль оперативного
разгона-торможения, который осуществляет оперативное изменение
скорости подачи по внешнему сигналу (например, при нарезании
резьб резцом). Это достигается за счет изменения аргумента
s
D
. В
общем случае значение ∆s зависит от отношения периодов работы
микроинтерполятора и макроинтерполятора. Однако в целях
оперативного управления скоростью можно изменять параметр ∆s
посредством внешних сигналов.
Работа микроинтерполяторов по отдельным координатам
синхронизируется макроинтерполятором в момент передачи
очередного приращения.
Геометрическая погрешность микроинтерполятора зависит от
скорости подачи
F
и радиуса
R
кривизны контура. С увеличением
F
и уменьшением
R
погрешность возрастает. Ускорение в пределах
3 – 5 м/c
2
слабо влияет на погрешность микроинтерполяции. При всех
реально существующих радиусов обрабатываемых окружностей,
скоростей и ускорений его геометрическая погрешность не
превышает 1 мкм.
Микроинтерполятор обладает оригинальным свойством: кроме
приращений пути, он рассчитывает свободные от шумов квантования
значения скоростей и ускорений, что позволяет применять для
управления электроприводами эффективные комбинированные
регуляторы.
Контрольные вопросы
1. Приведите структурную схему соединений программных
модулей для осуществления режимов позиционирования.
Объясните, как функционирует эта схема.
2. Приведите схему и алгоритм отсчета пути в режиме
позиционирования.
3. Выведите формулы, приведите графики и объясните алгоритм
работы модуля экспоненциального разгона-торможения.
4. Что такое «машинный нуль» в модуле экспоненциального
разгона-торможения?
5. Приведите структурную схему функционального модуля
разгона-торможения в системе ЧПУ класса ICNC.
97
6. Для чего необходима коррекция скорости в функциональном
модуле разгона-торможения и как она осуществляется?
7. Приведите цифровые модели, формулы и алгоритм
формирования контурной скорости по S-образному закону.
8. Как выглядит архитектура распределенной системы ЧПУ? Как в
этой системе происходит обмен данными между макро- и
микроинтерполяторами?
9. В чем заключается принцип работы микроинтерполятора?
Выведите дифференциальные уравнения микроинтерполятора.
10. Запишите математические формулы и объясните алгоритм
формирования приращений координат на выходе
микроинтерполятора.
98
4. УПРАВЛЕНИЕ СЛЕДЯЩИМИ
ЭЛЕКТРОПРИВОДАМИ В КОМПЬЮТЕРНЫХ УЧПУ
Ключевые слова:
Астатический регулятор, Двухконтурный регулируемый
электропривод, Контур тока, Коэффициент интегральной
составляющей, Коэффициент пропорциональной составляющей,
Настройка контура скорости, Настройка контура тока, Ошибка по
положению, Ошибка по скорости, ПИ-регулятор, Подчиненное
управление электроприводами, Последовательное корректирующее
устройство, П-регулятор, Предикатор, Регулятор обратной связи
по Э.Д.С., Регулятор положения, Регулятор скорости, Регулятор
тока, Робастность, Сигнал коррекции.
4.1. Цифровой регулятор положения следящего
электропривода
Регуляторы положения приводов подач в станках с ЧПУ всегда
строятся в цифровом исполнении. Это требование продиктовано тем,
что ошибка по положению электропривода не должна теряться в
течение всего времени работы станка. В противном случае по
окончании обработки очередной детали электроприводы могут не
вернуться в исходную точку программы, и технологический процесс
обработки будет нарушен. Для решения данной задачи регуляторы
положения реализуют в виде цифровых ПИ-регуляторов. В
компьютерных системах эти регуляторы, как правило, реализуются
программно.
Рассмотрим схему регулятора положения (рис.4.1) [11]. Входное
воздействие на ПИ-регулятор поступает с выхода интерполятора, в
виде одинарных 16-разрядных слов
X
D
, представляющих собой
приращения пути за период таймера (заданные приращения).
Значения
X
D
выражены целыми числами дискрет и передаются в
электропривод через равные интервалы времени
0
12
T
=-
мс.
99
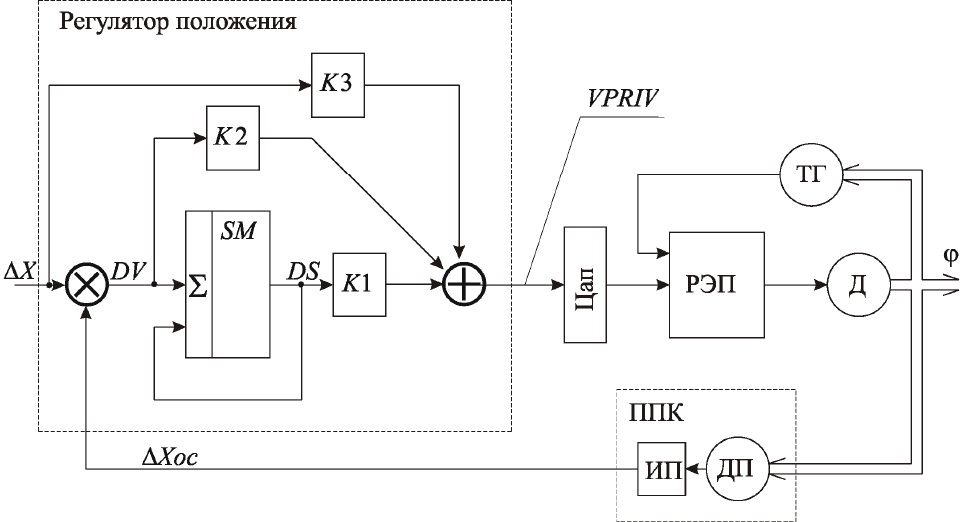
Рис.4.1. Схема регулятора положения:
X
D
– заданное приращение пути за
период таймера (входное воздействие);
oc
X
D
– фактическое приращение пути за
период таймера (сигнал обратной связи);
1,2,3
KKK
– коэффициенты
регулятора; ДП – датчик положения; ИП – измерительный преобразователь;
ППК – преобразователь перемещение-код
С помощью элемента сравнения осуществляется математическая
операция вычитания
,
DVXX
=D -D
oc
где
DV
– ошибка по скорости (целое число).
Приращение пути за период таймера
X
D
пропорционально
скорости, а разность
oc
XX
D -D
, равная
,
DV
пропорциональна
ошибке по скорости. Далее значение
DV
интегрируется с помощью
сумматора
SM
, умножается на коэффициент
1
K
и передается на
выход регулятора со знаком «+». Величина
DS
на выходе сумматора
– есть ошибка по положению (целое число) следящей системы.
Пропорциональная составляющая ошибки
DV
получается
умножением значения
DV
на коэффициент
2
K
.
Чтобы определить оптимальные значения коэффициентов ПИ-
регулятора, можно перейти от цифрового варианта регулятора к
аналоговому варианту и смоделировать этот вариант на ЭВМ. Между