Чикуров Н.Г. Алгоритмическое и программное обеспечение компьютерных систем управления
Подождите немного. Документ загружается.

70
3. УПРАВЛЕНИЕ КОНТУРНОЙ СКОРОСТЬЮ
Ключевые слова:
Алгоритм микроинтерполяции, алгоритм отсчета пути,
краевые условия, машинный нуль, микроинтерполятор, модуль
отсчета пути, модуль разгона-торможения, приводной контроллер,
программируемый логический контроллер, режим позиционирования,
составная кривая, управление контурной скоростью,
функциональный модуль разгона-торможения, цифровой фильтр.
3.1. Управление перемещениями рабочих органов
станка в режимах позиционирования
В режиме позиционирования взаимосвязь координатных
перемещений отсутствует. В этом режиме обеспечивается
автоматическое перемещение рабочего органа станка в координату,
заданную программой, без обработки детали в процессе
перемещения. В установленной позиции выполняется
технологический цикл обработки детали (сверление, зенкерование,
нарезание резьбы метчиком и др.). В режиме позиционирования
происходит ускоренное перемещение с последующим плавным
снижением скорости и высокоточной установкой в заданном
положении. Учитывая значительную долю холостых ходов в
технологическом цикле, обычно их осуществляют с максимальной
скоростью.
Позиционный режим управления характерен не только для
станков, но также и для промышленных роботов, транспортно-
накопительных систем, автоматизированных складов и других
вспомогательных устройств в составе автоматизированных
производств.
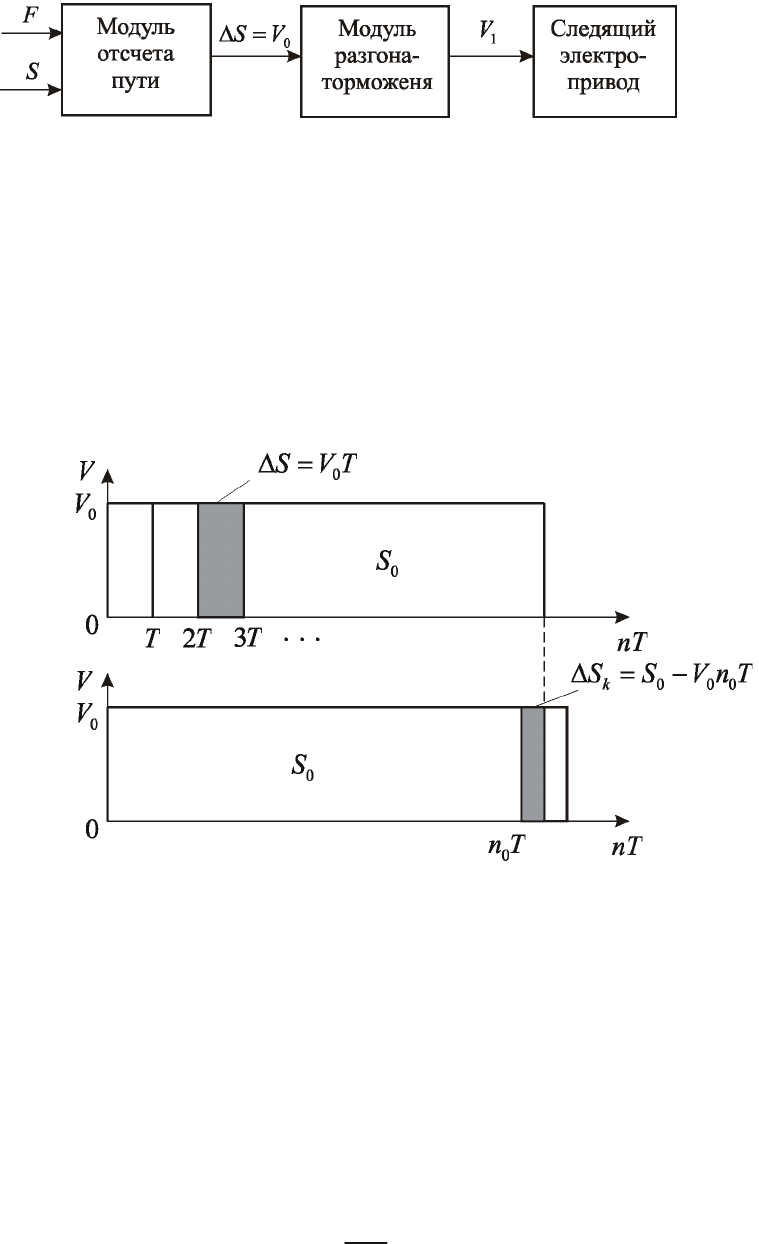
В компьютерной системе управления режим позиционирования
реализуется с помощью двух программных модулей: модуля отсчета
пути и модуля разгона-торможения (рис. 3.1) [13].
На вход модуля отсчета пути поступают из транслятора
управляющей программы значения скорости подачи
F
и величины
перемещения
S
. С выхода этого модуля на вход модуля разгона-
торможения передаются приращения пути за период таймера
0
SV
D=
.
71
Рис. 3.1. Управление режимом позиционирования
Модуль разгона-торможения осуществляет плавное управление
следящим электроприводом подачи, передавая на его вход сигнал
скорости
1
V
.
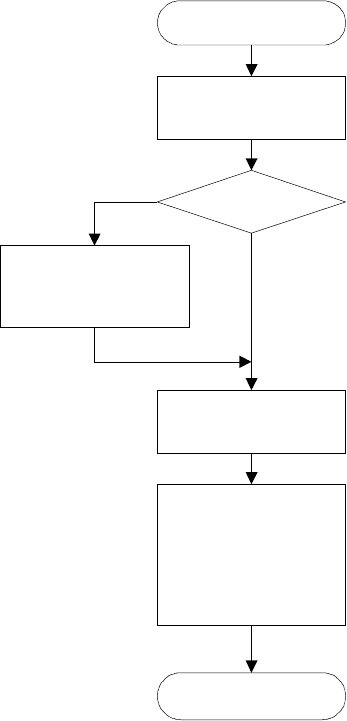
Рассмотрим схему отсчета пути рабочего органа
технологической машины во время позиционирования (рис. 3.2).
Рис. 3.2.Схема отсчета пути:
0
V
– скорость перемещения;
0
S
– заданный путь;
T
– период таймера
Из схемы видно, что за период таймера
T
рабочий орган проходит
путь
0
S VT
D=
.
Откуда следует, что
0
,
S
V
T
D
=
т.е. скорость – это есть приращение пути
S
D
за период таймера
T
.
72
Принимая за единицу отсчета пути дискрету перемещения, а за
единицу отсчета времени период таймера, можно записать
0
VS
=D
[дискр./период
T
].
Последнее приращение пути
k
S
D
, вероятнее всего, окажется
меньше предыдущих приращений, так как заданное
S
D
в общем
случае не укладывается целое число раз в
0
S
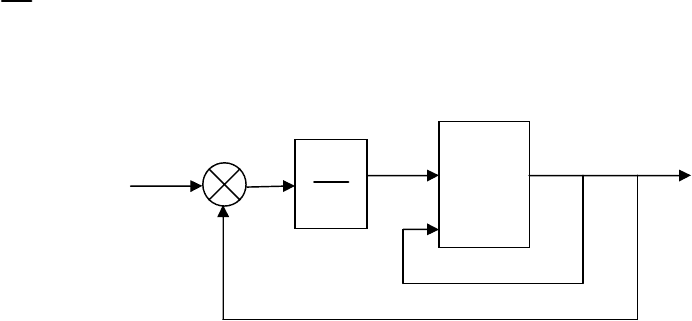
. С учетом этого
алгоритм отсчета пути в режимах позиционирования принимает
следующий вид (рис.3.3).
Да
Нет
Модуль
разгона-
торможения
SSS
= -D
0
S
³
0
S SS
S
D=D+
=
0
VS
=D
Начало
Конец
Рис.3.3. Блок-схема алгоритма отсчета пути
Ступенчатое изменение скорости
0
V
, подаваемое на вход
электропривода, вызывает динамические удары в его механической
части, что приводит к преждевременному износу передачи винт-гайка
качения, перегрузке электродвигателя и ограничивает максимальную
73
скорость позиционирования. Чтобы обеспечить плавное
регулирование скорости электропривода, в алгоритме отсчета пути
предусмотрен модуль разгона-торможения.
Основу модуля составляет цифровой фильтр в виде
апериодического звена, который при подаче на вход ступенчатого
входного воздействия
0
V
изменяет выходную величину
1
V
по
экспоненциальному закону (рис.3.4) [12].
Алгоритм работы этого фильтра определяется формулой:
1011
()
V V VkV
=-+
,
где
0
T
k
T
=
– коэффициент экспоненты; Т – постоянная экспоненты;
0
T
– период квантования (период таймера).
Рис.3.4. Цифровой фильтр
Переходные характеристики фильтра представляют собой
экспоненциальные кривые (рис. 3.5).
К цифровому фильтру предъявляются следующие требования:
1) входная и выходная информация представляет собой
последовательность целых чисел дискрет пути за период таймера, т.е.
скорости. Для записи этих чисел отводиться одинарное слово длиной
16 разрядов;
2) После завершения отработки сколь угодно большого
количества кадров суммарное количество дискрет пути на выходе
должно равняться количеству дискрет пути на входе фильтра.
Схема на рис. 3.4 не удовлетворяет второму требованию.
T
T
0
S
1
V
0
V
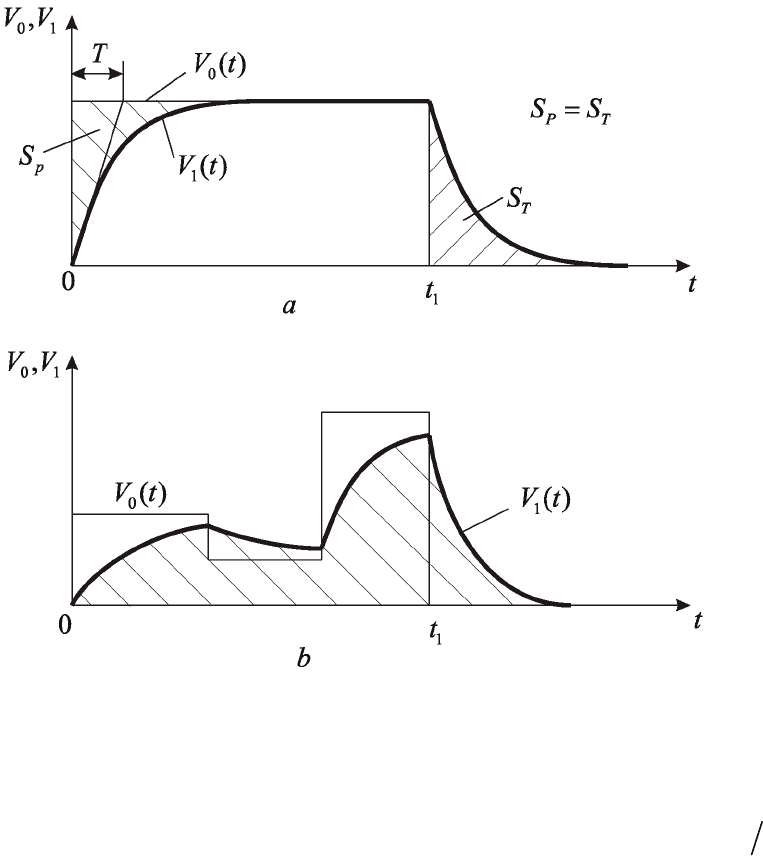
74
Рис.3.5. Переходные характеристики:
а – однократное изменение
0
V
; b – многократное изменение
0
V
Действительно, если записать значение коэффициента
0
k TT
=
в
виде слова одинарной длины, то после первого умножения
одинарного слова
01
()
VV
-
на коэффициент
k
получим результат
умножения в виде двойного слова. В следующем цикле вычислений
произведение
01
()
VVk
-×
займет слово тройной длины, далее
четверной и т.д. При работе с фиксированной запятой емкость
разрядной сетки быстро переполниться, что приведет к погрешности
вычислений. При отработке большого количества участков пути
указанная погрешность превысит допустимую величину даже при
переходе к вычислениям с плавающей запятой.
Указанный недостаток алгоритма можно устранить. если
вычислительную процедуру с младшими словами и со старшими
словами чисел выполнять по-разному (рис.3.6).
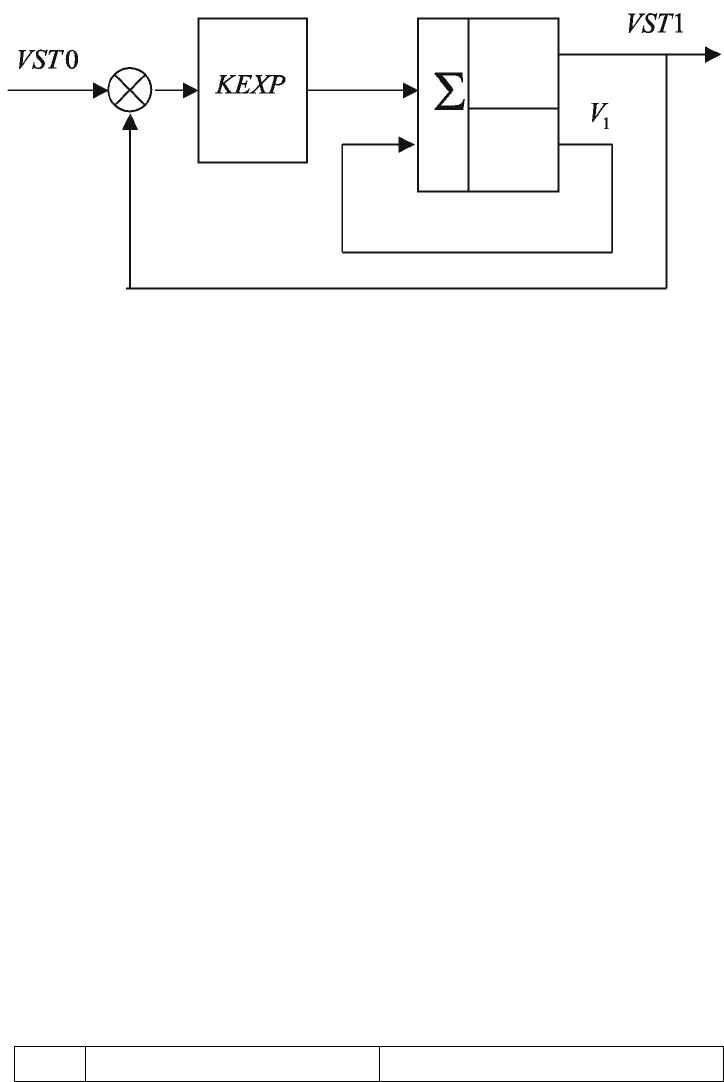
75
Рис.3.6. Цифровой фильтр:
0
VST
– входное воздействие (1 слово);
KEXP
– коэффициент экспоненты (1 слово);
1
V
– слово в сумматоре
(двойное слово);
1
VST
– выходная величина – старшее слово от
1
V
(1 слово)
Данная схема отличается тем, что умножение
( 0 1)
VST VST KEXP
-×
всегда выполняется со словами одинарной
длины. Поэтому результат умножения
1
V
никогда не превосходит
слова двойной длины.
Рассматривая данную схему, необходимо учесть, что по
окончании отработки кадра старшее слово от
1
VST
становится
равным нулю, а младшее слово от
1
V
может остаться
неотработанным, что приведет к ошибке позиционирования. Чтобы
избежать этой ошибки, надо перед началом отработки кадра
загрузить в сумматор так называемый "машинный нуль", который
содержит нули в старшем слове и единицы в младшем (рис.3.7).
31 16 15 0
±
0000 FFFF
Рис. 3.7. Машинный нуль
Знак "машинного нуля" выбирается в зависимости от
направления движения (рис.3.8).
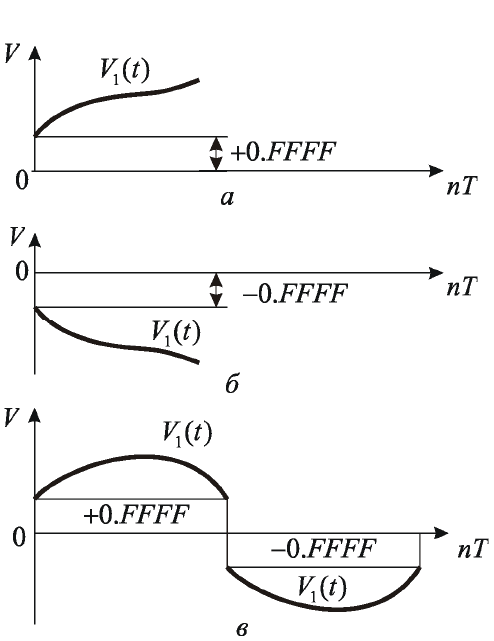
76
Рис.3.8. Знак «машинного нуля»: а – движение вперед;
б – движение назад; в – реверс
Таким образом, в алгоритме управления должен быть
предусмотрен следящий режим изменения «машинного нуля». При
каждом реверсе, когда функция
1
()
Vt
меняет знак, должен изменяться
знак «машинного нуля» на противоположный. В блок-схеме
алгоритма (рис.3.9) знак функции
1
V
присваивается переменной
1
SIGNV
. Если
10
V
³
, то
10
SIGNV
=
, а если
10
V
<
, то
11
SIGNV
=
.
Промежуточный результат вычислений сохраняется с помощью
внутренней переменной
X
. Если
0
X
³
, то это значит, что скорость
стала отрицательной и знак функции скорости
1
SIGNV
а также знак
машинного нуля надо сменить с положительного на отрицательный.
Если же
0
X
<
, то скорость стала положительной. Поэтому знак
машинного нуля и знак
1
SIGNV
надо сменить с отрицательного на
положительный.
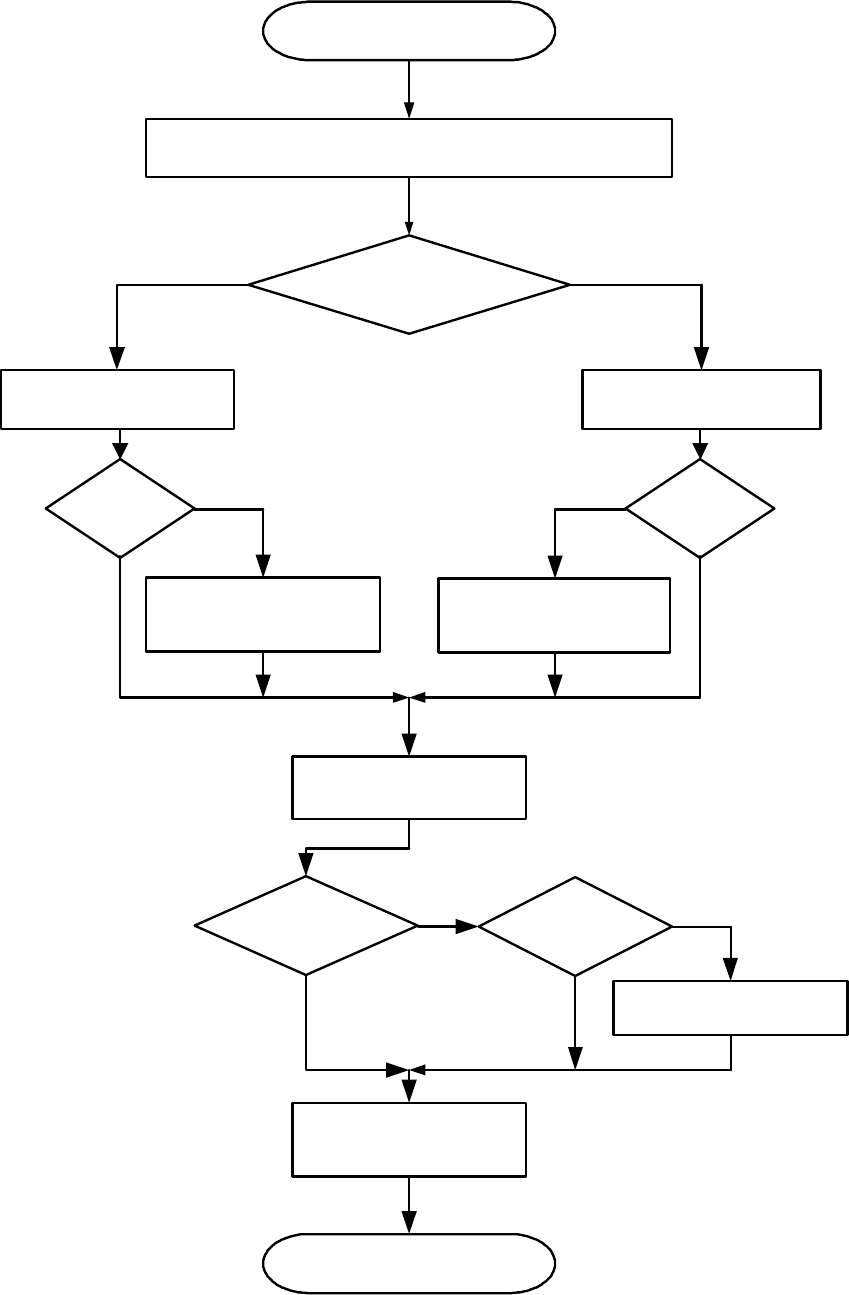
77
НАЧАЛ О
К ОН ЕЦ
1 1 ( 0 1)
V V VST VST KEXP
=+ -*
10
SIGNV
=
1 0.
X V FFFF
=-
1 0.
X V FFFF
=+
0
X
³
0
X
<
1 0.
V X FFFF
=-
11
SIGNV
=
1 0.
V X FFFF
=+
10
SIGNV
=
1 1[2]
VSTV
=
10
VST
³
1[0]0
V
=
1 11
VST VST
=+
Передача
1
V ST
Да Нет
Да Да
Да Да
Н ет Нет
НетН ет
Рис. 3.9. Блок-схема алгоритма
78
3.2 Управление контурной скоростью в системе ЧПУ
класса ICNC
В контурных системах ЧПУ класса ICNC для управления
скоростью движения инструмента вдоль контура обработки
используется функциональный модуль разгона-торможения, который
вычисляет шаг интегрирования интерполяторов в стационарных
режимах, а также в режимах разгона и торможения [13].
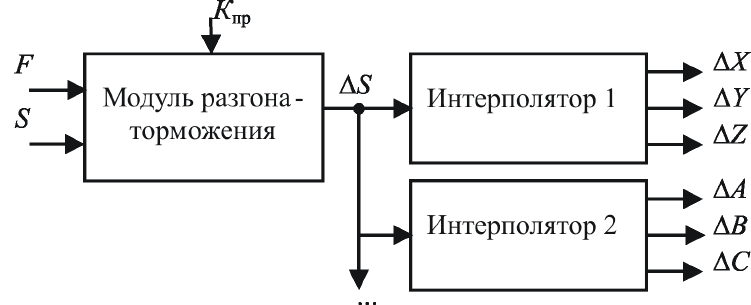
На вход модуля поступают значения трех параметров: длина
траектории S, по которой перемещается центр инструмента,
контурная скорость подачи F и процентное изменение подачи К
пр
(рис. 3.10).
Рис. 3.10. Связь модуля разгона-торможения с интерполяторами
В каждом такте интерполяции в модуле рассчитывается
текущая скорость подачи в виде приращений пути DS за период
таймера. Для интерполяторов величина DS является независимым
аргументом, в функции которого рассчитываются приращения
координат, передаваемые на следящие электроприводы станка. По
окончании каждого кадра управляющей программы обеспечивается
перемещение инструмента в конечную точку с заданной скоростью.
Закон разгона и торможения выбирается исходя из благоприятного
изменения ускорений и характера динамических нагрузок,
действующих на рабочие органы станка.
Чтобы оценить сложность задачи, которую требуется решить
при проектировании модуля разгона-торможения, достаточно
79
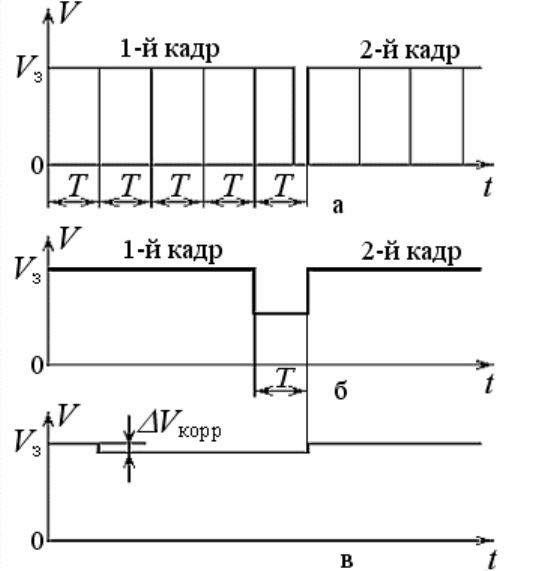
рассмотреть простой пример. Предположим, что необходимо
выполнить подряд два кадра с постоянной скоростью подачи
(рис. 3.11, а).
Рис. 3.11. Отсчет пути
Путь DS, проходимый электроприводом за каждый такт Т
таймера одинаков, суммарный путь за n тактов равен
Sn
D×
. Если
заданное перемещение S меньше чем
Sn
D×
, то остаток пути
()
SnS
D×-
меньше перемещения, которое следует пройти за один
такт. Следовательно, в начале последнего такта возникает "провал
скорости" (рис. 3.11, б). Он может достигать величины, близкой к
100 % от заданной, что приводит к возникновению в электроприводе
ударов. Чтобы исключить такие провалы скорости, достаточно
заранее, до окончания заданного пути уменьшить (скорректировать)
скорость на величину DV
корр
, которая не превышает 5 % от V
з
. В
результате перемещение завершится с меньшей скоростью, но
пройденный путь будет точно равен S (рис. 3.11, в). Ясно, что при
изменении скорости подачи по сложному математическому закону
отсчет пройденного пути, процедура коррекции скорости и алгоритм