Чикуров Н.Г. Алгоритмическое и программное обеспечение компьютерных систем управления
Подождите немного. Документ загружается.

150
Составляем реестр уравнений задающей подсистемы:
11
22
33
4
5
6
7 13 23
8
1,
2,
3,
1 ( ),
2 ( ),
3 ( ),
4 () ()0,
5
bb
bb
bb
bx bx b b c c
by by b b c c
bz bz b b cc
bu bu bx by
bv
Ux Д xy
Uy Д yy
Uz Д zy
kB kC k
U V K V z y Bz Cy
RRR
kCkAk
U V K V x z Cx Az
RRR
kA kB k
U V K V y x Ay Bx
RRR
U V K V Vk Vk
UVK
=®=
=®=
=®=
=® -+=--
=® -+=--
=® -+=--
= ® - j- j=
=®
23 13
( ) ( ) 0.
bv bx by
V Vk Vk- j+ j=
Дифференциальные уравнения интегрирующих звеньев
задающей подсистемы:
14
25
36
,
,
.
b bx
b by
b bz
pxV pyu
pyV pyu
pzV pyu
==
==
==
Коэффициенты трансформаторов:
13 36
23 36
( ) sin sin ,
( ) cos cos .
ky
ky
j = j=
j = j=
Матрица коэффициентов системы линейных алгебраических
уравнений.

151
1,1
2,2
3,3
4,4 4,3 4,2
5,5 5,1 5,3
6,6 6,2 6,1
7,7 7,4 1 3 7,5 2 3
8,8 8,4 2 3 8,5 1 3
1,
1,
1,
1, ,,
1, ,,
1, ,,
1, ( ), ( ),
1, ( ), ( ).
a
a
a
kB kC
aaa
RR
kC kA
aaa
RR
kA kB
aaa
RR
a akak
a a k ak
=
=
=
==-=
==-=
==-=
= =- j =- j
= =-j =j
Вектор свободных членов задающей подсистемы.
11
22
33
4
5
6
,
,
,
( ),
( ),
( ).
cc
cc
cc
By
By
By
k
B Bz Cy
R
k
B Cx Az
R
k
B Ay Bx
R
=
=
=
=--
=--
=--
Подсистема 2
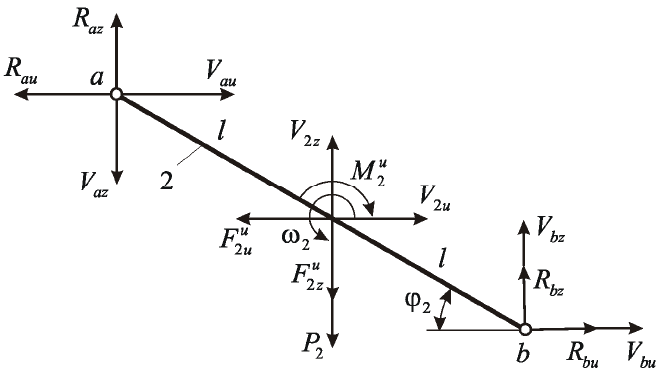
Подсистема 2 (рис.5.27) включает звено 2 механизма.
152
Рис.5.27
Запишем уравнения равновесия сил:
2
22
1) 0,
2) 0.
u
au u bu
u
az z bz
CRFR
C PRFR
--+=
-+-+=
Уравнение равновесия моментов:
22222
1) 0,
Rau Raz u Rbz Rbu
MMMMMM
--++=
где
2 2 12
2 2 22
2 2 12
2 2 22
sin ( ),
cos ( ),
sin ( ),
cos ( ),
Rau
au au
Raz
az az
Rbu
bu bu
Rbz
bz bz
M Rl Rk
M Rl Rk
M Rl Rk
M Rl Rk
= j=j
= j=j
= j=j
= j=j
где, в свою очередь,
122
222
() sin,
() cos.
kl
kl
j=j
j=j
Компонентные уравнения подсистемы 2:
153
2 22
2 22
2 22
1),
2),
3).
u
u
uu
u
zz
KMJ
K F mV
K F mV
=w
=
=
&
&
&
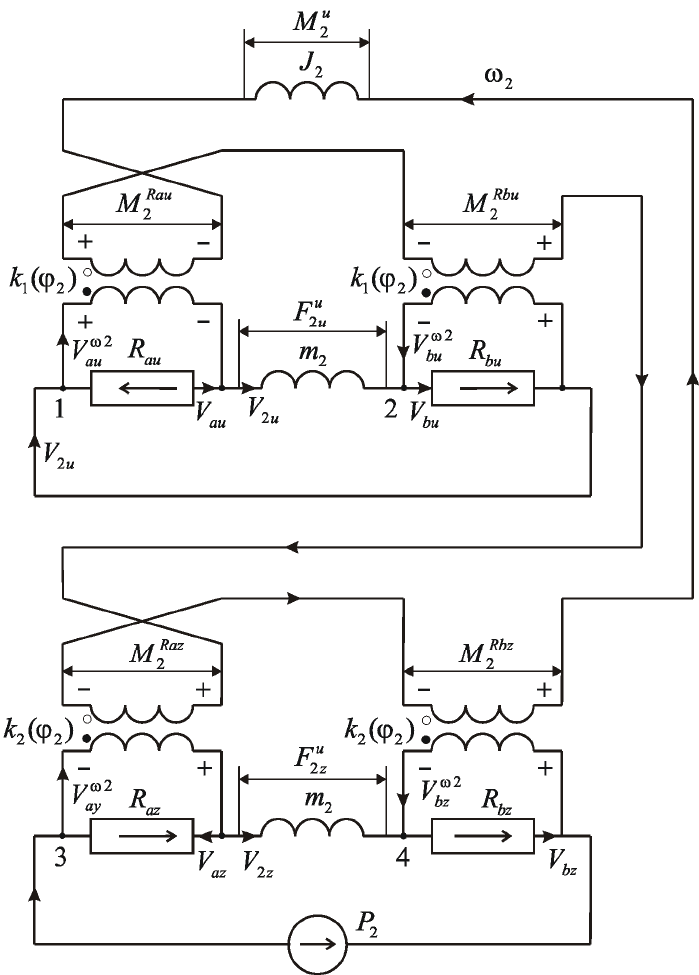
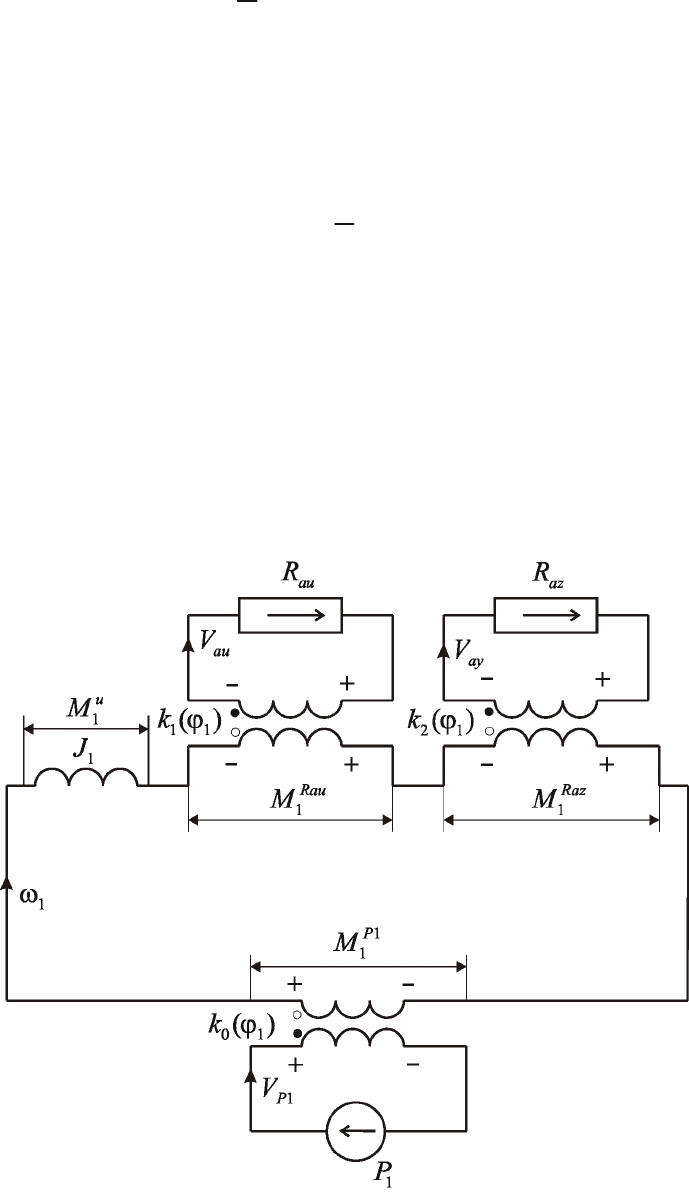
Строим эквивалентную электрическую схему замещения для
рассматриваемой подсистемы (рис. 5.28).
Рис.5.28

154
Для 4-х узлов электрической схемы записываем уравнения
Кирхгофа.
2
2
2
2
2
2
2
2
1.1) 0,
2.1) 0,
3.1) 0,
4.1) 0.
u au au
u bu bu
zazaz
z bz bz
KpVVV
KpVVV
Kp VVV
Kp VVV
w
w
w
w
--=
--=
--=
--=
В уравнениях трансформаторов записываем только зависимости
между токами.
2
212
2
212
2
222
2
222
1.2)(),
2.2)(),
3.2) ( ) ,
4.2)().
au
bu
az
bz
TkV
TkV
TkV
TkV
w
w
w
w
w j=
w j=
w j=
w j=
Подсистема 2 кинематической модели содержит одно
дифференциальное уравнение.
22
1).
Dp
j = -w
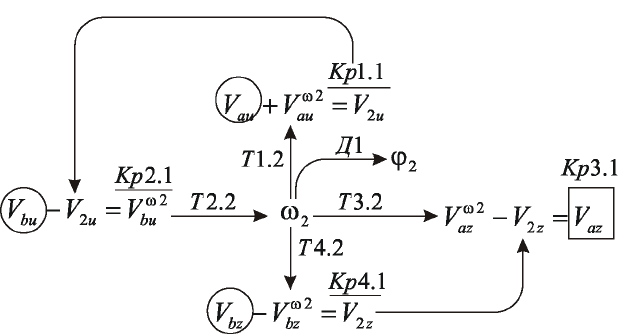
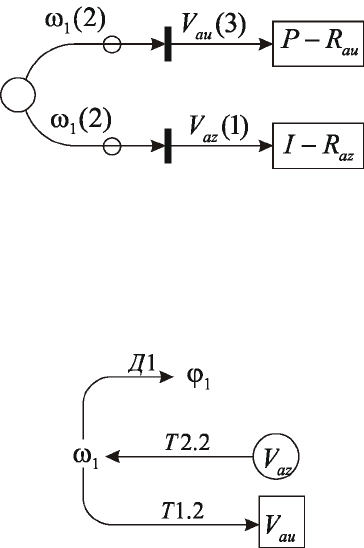
Карта токов подсистемы 2 имеет следующий вид (рис.29):
Рис.5.29
155
Сеть связей подсистемы 2 включает только ветви токов
(рис.5.30).
Рис.5.30
На основании сети связей записываем реестр уравнений
подсистемы 2.
92 24
2
1022
22
112
2
1222
22
13 212
2
14 2 212
22
15 222
16
1,
1.1 0,
2.1 0,
4.1 0,
1.2 ( ) 0,
2.2 ( ) 0,
3.2 ( ) 0,
u u au au
bu ububu
z z bz bz
au au
bu
az az
bz
UDy
UV Kp VVV
UV Kp VVV
U V Kp VVV
UVT kV
U T kV
UVT kV
UV
w
ww
w
ww
w
ww
=j® j=
=® --=
=® --=
=® --=
=® wj-=
=w® wj-=
=® wj-=
=
22
222
2
172
18
4.2 ( ) 0,
3.1 0,
__________________________________
?
bz
az z az az
au
T kV
U V Kp VVV
UV
ww
w
® wj-=
=® +-=
=®
Дифференциальное уравнение интегрирующего звена.
2 2 4 14
.
p pyU
k =-w =-
Коэффициенты трансформаторов подсистемы 2:
156
12 24
22 24
( ) sin sin ,
( ) cos cos .
k l ly
k l ly
j = j=
j = j=
Матрица коэффициентов системы линейных алгебраических
уравнений.
9,9
10,10 10,18 10,13
11,10 11,7 11,11
12,12 12,6 12,16
13,14 1 2 13,13
14,14 1 2 14,11
15,14 2 2 15,15
16,14 2 2 16,16
17,12 17,1
1,
1, 1, 1,
1, 1, 1,
1, 1, 1,
( ), 1,
( ), 1,
( ), 1,
( ), 1,
1,
a
aaa
aaa
aaa
aka
aka
aka
aka
aa
=
= =- =-
==-=
==-=
= j =-
= j =-
= j =-
= j =-
=
7 17,15
1, 1,
a
= =-
Вектор свободных членов системы линейных алгебраических
уравнений.
94
.
By
=
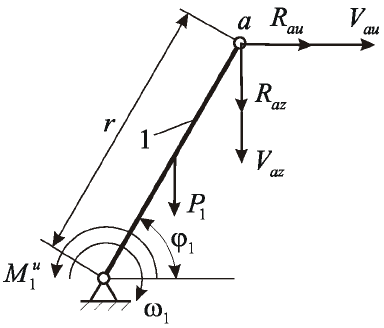
Подсистема 1
Подсистема 1 (рис.5.31) включает звено 1 механизма.
Рис.5.31
Запишем уравнение равновесия моментов для звена 1.
157
1
11 11
1) 0,
P RauRazu
MMMMM
+ + -=
где
1
1 1 1 101
1 1 11
1 1 21
1
cos ( ),
2
sin ( ),
cos ( ),
P
Rau
au au
Raz
az az
M Pr Pk
M Rr Rk
M Rr Rk
= j=j
= j=j
= j=j
где, в свою очередь,
011
111
211
1
() cos,
2
() sin,
() cos.
kr
kr
kr
j=j
j=j
j=j
Компонентное уравнение.
1 11
1).
u
KMJ
w
=
&
На основании записанных уравнений строим эквивалентную
электрическую схему замещения (рис.5.32).
Рис.5.32
158
Уравнения трансформаторов включают только соотношения
токов.
111
121
1.2) ( ) ,
2.2) ( ) .
au
az
TkV
TkV
w j=
w j=
Дифференциальное уравнение интегрирующего звена
подсистемы 1.
11
1).
Dp
j = -w
Карта токов подсистемы 1 кинематической модели (рис.5.33).
Рис.5.33
Сеть связей (рис.5.34).
Рис.5.34
Реестр уравнений подсистемы 1.
18 111
19 1 121
201 15
1.2 ( ) 0,
2.2 ( ) 0,
1,
au au
az
UVT kV
U T kV
U Дy
=® wj-=
=w® wj-=
=j® j=
159
Дифференциальное уравнение подсистемы 1:
1 1 5 19
,.
p pyU
j =-w =-
Коэффициенты трансформаторов.
11 15
21 15
( ) sin sin ,
( ) cos cos .
k r ry
k r ry
j = j=
j = j=
Матрица коэффициентов системы линейных алгебраических
уравнений.
18,18 1 1 18,18
19,19 2 1 19,17
20,20
( ), 1,
( ), 1,
1,
aka
aka
a
= j =-
= j =-
=
Вектор свободных членов системы линейных алгебраических
уравнений.
205
.
By
=
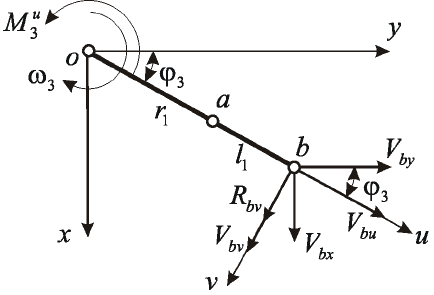
Подсистема 3
Подсистема 3 определяет движение звеньев механизма вокруг
оси
z
. Чтобы построить модель этой подсистемы, рассмотрим
проекции звеньев
oa
и
ab
на координатную плоскость
Oxy
(рис.5.35).
Рис.5.35