Bichop R.H. (Ed.) Mechatronic Systems, Sensors, and Actuators: Fundamentals and Modeling
Подождите немного. Документ загружается.

21-72 Mechatronic Systems, Sensors, and Actuators
also known as distributors, are distinguished according to the type of mobile element and therefore of
their internal structure, by the number of possible connections with external pipes and by the number
of switching positions.
The mobile element can be a poppet type or a spool type. Poppet valves are indifferent to fluid type
and are not affected by impurities in the fluid, but require high actuating forces as it is not possible to
compensate for the hydraulic forces of the oil pressure. Spool valves permit simultaneous connection to
several ways and different switching schemes and therefore are more common because of their variability.
The number of possible connections is defined by the number of hydraulic connections or ways present
on the external body of the valve. The number of switching positions corresponds to the number of
connection schemes which a valve makes it possible to obtain by means of appropriate movements of
the mobile element.
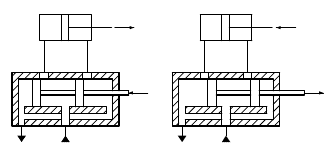
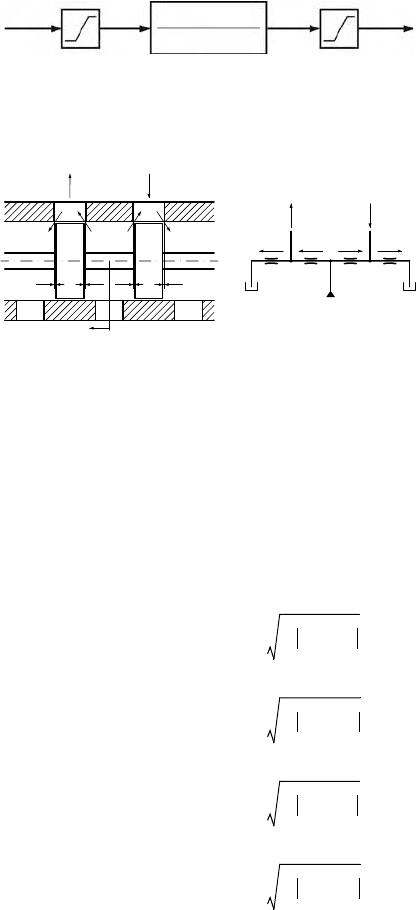
Figure 21.99 shows the operating scheme of a four-way, two-position spool valve (indicated as 4/2)
connected to a double acting linear actuator. In the first position (Figure 21.99a) the supply is in
communication through output A with the rear chamber of the cylinder, while the front chamber
discharges through port B. In this configuration, the piston effects an advance stroke with the rod coming
out. In the second position, (Figure 21.99b), the result of the movement of the slide valve is that the feed
and discharge conditions of the two chambers are inverted, and therefore, a retract stroke is effected.
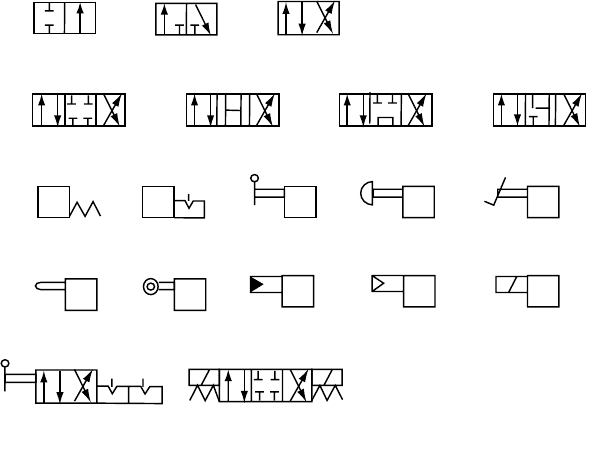
A directional valve with several positions is represented symbolically by means of quadrants side by
side depicting the connections made by each position. Figure 21.100, for example, shows some directional
valve symbols in accordance with ISO standards. The central configuration of the three-position valves,
which is normally the rest position, is linked with the geometry of the valve spool and of the associated seats.
Directional valves can be controlled in various ways (Figure 21.100): manually, by applying muscle
power; mechanically, by means of devices such as cams, levers, etc.; hydraulically and pneumatically, by
means of fluids under pressure; and electromagnetically, directly or piloted, depending on whether the
positioning force is generated directly by the electromagnet placed in line with the slide valve, or by
means of a hydraulic fluid, the direction of which is managed by a pilot valve which is smaller than the
main controlled valve.
On–Off Valves
On–off valves are unidirectional valves, which permit the fluid to flow in one direction only. Because they
impede flow in the opposite direction they are also called nonreturn or check valves. On-off valves are
normally placed in the hydraulic circuit between the pump and the actuator so that, when the generator
stops, the fluid contained in the system is not discharged into the reservoir but remains in the piping. This
prevents a waste of energy for subsequent refilling and guarantees positioning of the actuator under load.
Constructively, check valves consist of an actuator, with ball or piston, which in the impeded flow
configuration is maintained in contact against its seat by the thrust of a spring (nonreturn valve), or by
the pressure difference between inlet and outlet (unidirectional valve).
Pressure Regulator Valves
There are essentially two types of pressure regulator valves: pressure limiter valves or relief valves, and
pressure reduction valves.
FIGURE 21.99 Scheme of four-way two-position valve.
SupplyReturn
(b)
(a)
BBAA
SupplyReturn
9258_C021_Sect002-005.fm Page 72 Wednesday, October 10, 2007 7:10 PM
Actuators 21-73
Relief valves guarantee correct operation of the system, preventing the pressure from exceeding danger
levels in the system itself. There is always one maximum pressure valve in a hydraulic circuit to discharge
any excess flow not used by the system back towards the reservoir. This is because the generator, or
positive-displacement pump, provides a continuous flow of fluid which, if not absorbed by the user and
in the absence of a relief or maximum pressure valve, would let the pressure in the system increase to
unacceptable values. Pressure limiter valves can be direct-acting or piloted. The first provides the force
of a spring with a fixed preload as the force contrasting the pressure of an obturator or an adjustable
one, which guarantees the maximum opening pressure. The latter replaces the action of the spring with
that of the hydraulic control fluid managed by a pilot valve.
The function of the pressure regulator valves is to maintain a constant pressure valve downstream
from them, independently from variations in the upstream pressure. The regulated pressure value can
be set manually, by means of a pilot signal, or by an electrical analog command. In the latter case, pressure
regulator valves may operate in closed electrical loops, as they have an internal transducer to measure
the controlled pressure.
Flow-rate Regulator Valves
A flow-rate regulator valve makes it possible to control the intensity of the flow of fluid passing through
it. Functionally it operates as a simple restriction, similar to an orifice, with a variable area. The flow
passing through a restriction is a function of the area of passage and of the difference in the pressures
upstream and downstream from the component. The simple restriction is therefore sensitive to the load,
as the flow rate also depends on the pressure drop at its ends, which is established by the other components
in the circuit.
In the case of a pressure-compensated flow regulator valve, the flow rate is found to be maintained
sufficiently constant above a minimum pressure stage (typically 10 bar) as an exclusive function of the
external manual or electrical set-point. In this case, the valve has two restrictions in series, one of which
is fixed and the other automatically variable, so as to maintain the pressure drop constant on the fixed
restriction and guarantee the constancy of the flow rate.
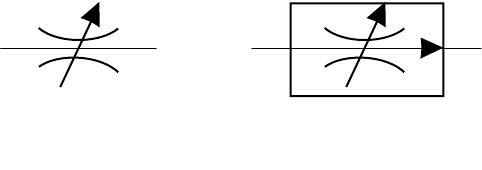
The symbols for flow regulator valves in accordance with ISO standards are given in Figure 21.101.
FIGURE 21.100 Valves symbols.
3 Position, 4 way
open centre
3 Position, 4 way
P port closed
3 Position, 4 way
tandem centre
3 Position, 4 way
closed centre
3 Position, 4 way value,
solenoid operted with
spring center
2 Position, 4 way value
lever operted with detents
2 Position
4 way
2 Position
3 way
2 Position
2 way
Lever
Plunger Roller Hydraulic pilot Pneumatic pilot Solenoid
Foot pedalPush buttonDetentSpring return
9258_C021_Sect002-005.fm Page 73 Wednesday, October 10, 2007 7:10 PM
21-74 Mechatronic Systems, Sensors, and Actuators
Proportional Valves and Servovalves
Servovalves began to appear at the end of the 1930s and were mainly used in the military and aeronautical
fields. The first commercial versions appeared in the mid-50s. Servovalves and proportional valves are
widely used today in the civil field, in the aeronautical, aerospace, automotive, and industrial sectors. In
general, they are used for the continuous control of the displacement, speed, and force of a hydraulic
actuator from which high performance is requested in terms of positioning precision, or accuracy in up
and running conditions, and of working frequency bandwidth amplitude, both in open and closed loop
control configurations.
A servovalve or proportional valve is a fluid component capable of producing a controlled output as
a function of an input of electrical type. The device converting the electric signal into an action of the
spool or poppet of the valve is electromagnetic, of the torque motor or proportional solenoid type. The
torque motor converts a small DC current into torque acting on the rotor plate, in bipolar mode.
Proportional solenoids produce a unidirectional force on the mobile armature function of the current
circulating in the winding, with the characteristic of maintaining this force approximately constant within
the cursor work displacement range. The torque motor, with lower current and inductance values, has
shorter response times than the servosolenoid, which operates with notably higher currents, but generates
lower mechanical power outputs. The torque motor, therefore, constitutes the pilot stage usually found
in servovalves, while the servosolenoid used in proportional valves acts directly on the valve spools.
The magnitude directly controlled by the servovalve or proportional valve can be a flow rate or a
pressure difference, depending on the type.
Servovalves and proportional valves are usually distinguished on the basis of the following character-
istics:
•
Input signals
•
Precision
•
Hysteresis
•
Linearity between input and output
•
Dead band
•
Bandwidth
Input signals are characterized by the type of signal and range of variation. Current signals (±10 mA
or 4–20 mA) or voltage ones (0–10 V) are typical. Precision is intended as the difference between the
desired value and the value effectively achieved. It is provided as a percentage of the full scale value.
The hysteresis derives from the different behavior shown by the component with ascending settings and
corresponding points descending. Its value expresses the percentage ratio between the maximum devi-
ation and the full scale value. Linearity by nature is a characteristic that can be assessed over the
entire working range. It can be expressed in an absolute manner as the maximum percentage deviation
of the input/output relation of its linear regression. In general, better linearity is requested in position
control compared with the cases of speed, pressure, or force controls. The dead band determines the
minimum input value at which an output variation is obtained. Unlike the above, bandwidth is a
FIGURE 21.101 Symbols of flow control valves.
Adjustable
restrictor
valve
Pressure
compensated
flow control valve
9258_C021_Sect002-005.fm Page 74 Wednesday, October 10, 2007 7:10 PM
Actuators 21-75
characteristic of the dynamic type. This is because it refers to a frequency diagram of the component
and defines the frequency at which the response drops by 3 dB below the low frequency value. Normally,
a bandwidth two to five times greater is required for continuous control valves compared with that
required by the system.
The main differences between servovalves and proportional valves are shown in Table 21.6. Except for
the traditional difference in the electromechanical conversion device, there are overlaps in the static and
dynamic characteristics in many components available on the market.
On the basis of the generically superior static and dynamic characteristics, servovalves are commonly
used in closed loop controls while proportional valves are used in open loop systems.
Servovalves
Two-stage models are very common in the context of servovalves, where a first pilot stage converts a low
power electric signal into a pressure difference capable of acting on the slide valve of the second stage,
usually four-way and symmetrical. Flow rate control servovalves are divided into two categories on the
basis of how they make the electric–hydraulic conversion:
•
Nozzle-flapper
•
Jet-pipe
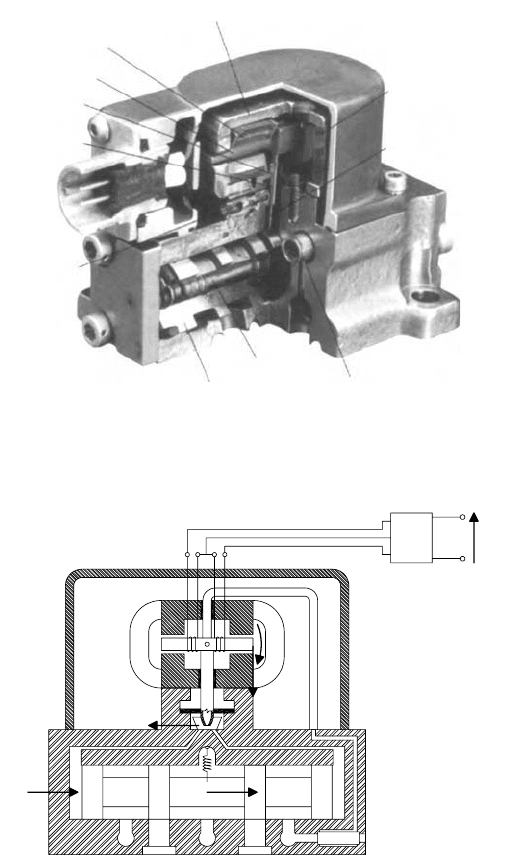
An example of nozzle flapper servovalves is shown in Figure 21.102. It comprises two stages: the former
consists of a torque motor, the flapper, and a system of nozzles and chokes, while the latter consists
mainly of the spool valve and output ports. The torque motor, constituted by the motor coil, the magnet,
the armature, and the polepiece, is capable of transmitting a torque to the flapper which undergoes an
angular displacement, thereby obstructing one of more calibrated nozzles to a greater degree. This
operation causes a pressure difference at the ends of the spool, thereby causing the latter to move until
the feedback wire, which connects the spool and the flapper, returns the flapper to the central position.
Through the flow metering slot carried out in the bushing, the spool thereby permits communication
between the various ports. The feedback wire is an elastic flexional element that provides the feedback
between the main power stage (spool valve) and the first stage (torque motor).
This type of valve usually requires a greater degree of oil filtration, as nozzle-flappers are more sensitive
to contaminants compared with the jet-pipe system.
Figure 21.103 shows a schematic section of an example of a servovalve of the jet-pipe type. It is
connected to orifice P (supply) of the servovalve by means of a filter and flexible hose. It should be noted
that, unlike the nozzle-flapper valve, it is not necessary to filter the entire incoming oil flow, but only
what is called the control flow (the one going through the jet-pipe); this is certainly an advantage in
terms of economic running and sensitivity to solid contamination. Starting with a standardized input
voltage, the amplifier produces a voltage increase in one torque motor coil and an identical reduction in
TABLE 21.6 Main Typical Differences between Servovalves and Proportional Hydraulic Valves
Servovalve Proportional Valve
Electromechanical
converter
Bidirectional torque motor (0.1 ÷ 0.2 W)
with nozzle-flapper or jet pipe
Unidirectional servosolenoid
(10 ÷ 20 W)
Input current 100 ÷ 200 mA <3 A
Flow rate 2 ÷ 200 l/min (two stage type) with valve
pressure drop = 70 bar
10 ÷ 500 l/min (single stage type)
with valve pressure drop = 10 bar
Hysteresis <3% (<1% with dither) <6% (<2% with electric feedback)
Bandwidth >100 Hz <100 Hz
depending on the amplitude of the input
and of the supply pressure
depending on the amplitude of
the input
Radial clearance of
the spool
1
µ
m (aerospace) 2 ÷ 6
µ
m
4
µ
m (industrial)
Dead band of the spool <5% of the stroke Overlap 10–20% of the stroke, less
if compensated
9258_C021_Sect002-005.fm Page 75 Wednesday, October 10, 2007 7:10 PM
21-76 Mechatronic Systems, Sensors, and Actuators
the other. This provokes an imbalance of the forces at the ends of the motor armature, generating a
torque which tends to make the armature itself rotate and the jet-pipe with it. The displacement of the
nozzle involves a different distribution of the control flow between the two pipes below it and, as a result,
a pressure difference is created at the ends of the spool with a consequent net force on it, which causes
its displacement. A spring element connects the spool and the jet-pipe, creating position feedback. The
displacement of the spool and jet-pipe deforms the feedback spring, giving rise to a force proportional
to it, and this makes it possible to balance the torque applied to the jet-pipe and the force generated at
the ends of the spool. In this way, the system finds an equilibrium position, proportional to the input
voltage. The feedback spring also produces centering of the slide valve at rest, making the presence of
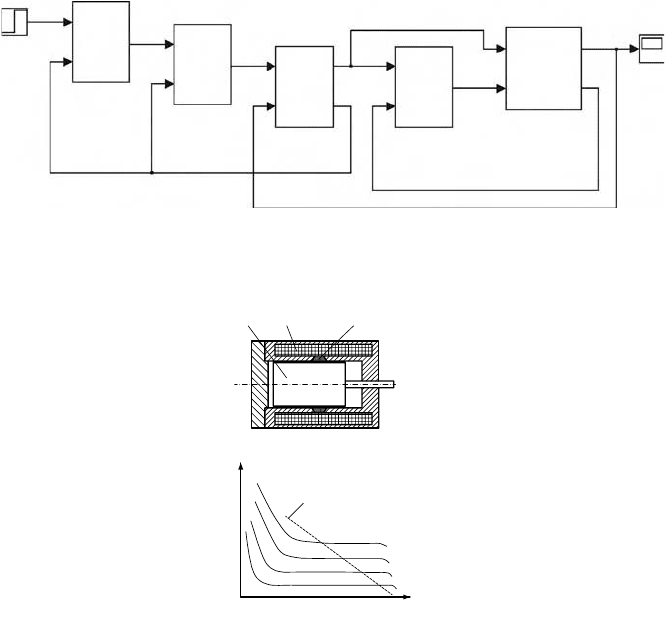
centering springs superfluous. Figure 21.104 shows the block diagram of the jet-pipe servovalve compo-
nents with annotations of the physical magnitudes present in Figure 21.103.
FIGURE 21.102 Nozzle-flapper servovalve (Moog).
FIGURE 21.103 Jet-pipe servovalve scheme.
Motor coil
Armature
Flapper
Nozzle
Magnet
Upper polepiece
Feedback wire
Hydraulic
amplifier
filter
Spool
Bushing
Flexure
sleeve
NN
S
PBTAP
X
j
X
s
X
a
S
C
mot
V
com
F
com
AMP
9258_C021_Sect002-005.fm Page 76 Wednesday, October 10, 2007 7:10 PM
Actuators 21-77
Proportional Valves
Proportional valves can be subdivided into proportional in flow and proportional in pressure (relief and
pressure reduction) valves. In the first case, the action of the servosolenoid armature (Figure 21.105a)
displaces the main spool of the valve, which is checked by a spring on the valve body.
The characteristics of the force generated by the servosolenoid, along the entire possible stroke of the
spool, is a function of the input current only, as indicated in Figure 21.105b. For all possible values of
the input current, the equilibrium of the magnetic force supplied by the solenoid and of the feedback
forces of the spring is determined by reaching a certain position value.
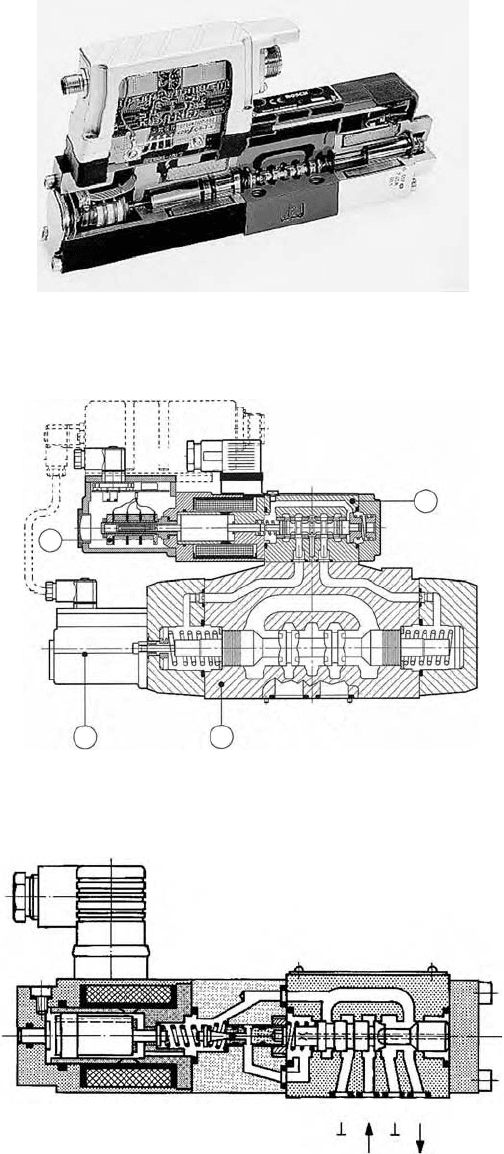
In cases in which precise positioning of the slide valve is requested, position feedback is introduced.
The photograph of a proportional valve of this type is shown in Figure 21.106. The input signal to the
servosolenoid, sent by the feedback module, is the error compensated by a PID network between the
reference signal and the feedback signal from the position transducer LVDT. The valve’s accuracy and
repeatability is improved by using the position feedback, as the hysteresis errors and those due to friction
between the moving parts are partially compensated.
Flow proportional valves can have two stages. In this case, the outputs of the pilot proportional valve
feed the end chambers of a spool valve of greater size, permitting greater controlled flows to be obtained
while reducing dynamic performance at the same time. An example of a two-stage flow proportional
valve is shown in Figure 21.107.
In pressure regulator proportional valves, the action of the servosolenoid acts on a conical needle in
such a way so as to regulate the pressure in the chamber upstream from the needle itself. Figure 21.108
shows the plan of a pilot operated proportional relief valve.
FIGURE 21.104 Block diagram of a jet-pipe servovalve.
FIGURE 21.105 Proportional servosolenoid: (a) solenoid section scheme, (b) solenoid characteristics
.
Electric circuit
Jet-pipe hydraulic
amplificator
Jet-pipe
equilibirum
Output
X
s
Spool
equilibirum
V
com
V
com
C
mot
C
mot
Input
I
com
I
com
F
com
F
com
d(X
s
)/dt
Magnetic circuit
X
s
X
j
X
j
X
s
X
a
X
a
X
a
X
j
d(X
s
)/dt
Force
Stroke
0.2 A
0.6 A
1.0 A
1.4 A
a)
b)
Spring characteristic
Non–magentic ring
CoilArmature
9258_C021_Sect002-005.fm Page 77 Wednesday, October 10, 2007 7:10 PM
21-78 Mechatronic Systems, Sensors, and Actuators
FIGURE 21.106 Flow proportional valve (Bosch Rexroth).
FIGURE 21.107 Double stage flow proportional valve: (1) main spool valve stage, (2) pilot stage, (3) LVDT of the
pilot stage, (4) LVDT of the main stage (Atos).
FIGURE 21.108 Proportional pressure relief valve (Bosch Rexroth).
3
4
1
2
A
B
A P B T
9258_C021_Sect002-005.fm Page 78 Wednesday, October 10, 2007 7:10 PM
Actuators 21-79
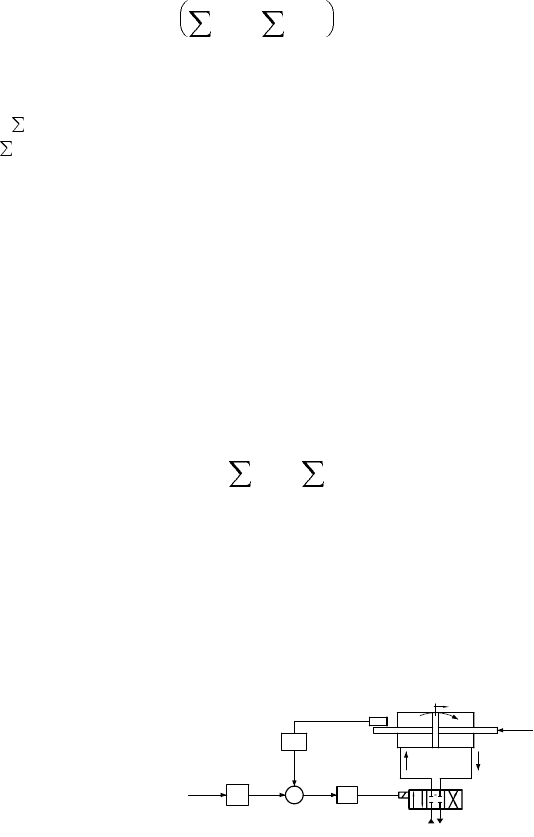
21.4.4 Modeling of a Hydraulic Servosystem for Position Control
Figure 21.109 shows the scheme of a hydraulic servo system for position control constituted by a double
acting, double ended actuator controlled in closed loop by a four-way servovalve. The x position of the
piston is determined by the equilibrium of the forces acting on it: external force, thrust due to the pressures
P
1
and P
2
acting in the chambers of the ram, friction force, and force of inertia. The pressures P
1
and
P
2
are determined by the oil flows Q
C1
and Q
C2
entering and leaving the chambers. Flow rate Q
FI
represents
the oil leakage flow between the piston and the barrel. The flow proportional valve controls the oil flow
on the basis of the reference signal ref from a compensator G
C
. The input to the compensator is the error
e
V
between the signal V
SET
, corresponding to the desired rod position x
SET
, and the feedback signal V
F/B
,
corresponding to the effective rod position x measured by a position transducer LVDT.
The actuator is modeled by considering the equations of flow continuity in the chambers and the
dynamic equilibrium equation for the rod. The continuity equation is expressed in a general form:
(21.39)
where
Q
IN
= sum of the flows in volume entering
Q
OUT
= sum of the flows in volume leaving
ρ
= density
V = volume
t = time
From the definition of the compressibility modulus of the oil
β
, P being the pressure in the chamber
considered:
(21.40)
We obtain
(21.41)
The continuity equation for chamber 1 is
(21.42)
FIGURE 21.109 Scheme of a hydraulic servosystem with position control.
ρ
Q
IN
Q
OUT
–
d
ρ
V()
dt
---------------
ρ
dV
dt
-------
V
d
ρ
dt
------
+==
dV
V
-------
d
ρ
ρ
------–
dP
β
------–==
Q
IN
Q
OUT
–
dV
dt
-------
V
β
---
dP
dt
------
+=
Q
C1
Q
FI
– A
c
x
·
V
0
A
c
xV
sm
++
β
-----------------------------------
dP
1
dt
--------
+=
LVD T
K
TP
ref
–
+
G
C
e
V
Q
C2
Q
C1
Q
FI
F
E
P
S
P
T
x,
x
WW
P
2
P
1
K
R
x
SET
V
SET
V
RET
••
x,
•
9258_C021_Sect002-005.fm Page 79 Wednesday, October 10, 2007 7:10 PM
21-80 Mechatronic Systems, Sensors, and Actuators
The continuity equation for chamber 2 is
(21.43)
where
Q
C1
= flow entering chamber 1
Q
C2
= flow leaving chamber 2
Q
FI
= leakage flow between piston and barrel
A
c
= thrust section =
D
al
= bore diameter
D
st
= rod diameter
V
0
= volume of the chambers with piston centered = A
c
L/2
L = stroke
x = piston displacement (x = 0 in centered position)
V
sm
= dead band volume
The dynamic equilibrium equation of the piston is
(21.44)
where
M = translating mass
F
e
= external force
F
A
= force of friction =
γ
= coefficient of viscous friction
F
A
= force of coulomb friction
Leaks can be modeled as resistances in laminar and steady-state conditions of the following type:
(21.45)
where
R = resistance
Q = flow rate
∆P = pressure difference
In the case of an annular pipe, we get
(21.46)
where
D = seat diameter
h = meatus thickness = (D − d)/2
d = spool diameter
ε
= eccentricity = 2e/(D − h)
e = distance between seat axis and spool axis
µ
= dynamic viscosity
l = meatus length
Q
FI
Q
C2
– A
c
x
·
V
0
− A
c
xV
sm
+
β
-------------------------------------
dP
2
dt
--------
+=
(D
al
2
D
st
2
– )
π
/4
P
1
A
c
P
2
A
c
F
e
Mx
··
F
A
–––– 0=
γ
x
·
F
ATT
sign(x
·
)+
R
∆P
Q
-------
=
Q
π
Dh
3
11.5
ε
2
+()
12
µ
l
---------------------------------------
∆P=
9258_C021_Sect002-005.fm Page 80 Wednesday, October 10, 2007 7:10 PM
Actuators 21-81
The dynamic behavior of the electromechanical converter and of the spool valve can be identified with
a linear model of the second order between the reference ref and the slide valve position x
V
, as indicated
in Figure 21.110, where K
S
(m/V) is the static gain of the valve,
σ
n
(rad/s) the natural frequency of the
valve, and
ζ
the damping factor of the valve.
The flows regulated by the proportional valves are indicated in detail in the plan in Figure 21.111.
Having defined the areas A
1
, A
2
, A
3
, A
4
, functions of the spool displacement x
V
, on the basis of the
geometry, the flows transiting through the valve as a function of the pressures are given by
(21.47)
(21.48)
(21.49)
(21.50)
where P
S
is the supply pressure, P
T
is the pressure of the discharge reservoir, and C
d
is the flow coefficient
of the metering ports.
Therefore we get
(21.51)
(21.52)
The system of equations given above can be linearized in a working neighborhood, defined by the
passage area of the valve A
V0
, load pressure drop P
L0
= P
1
– P
2
, and piston position x
0
. In the hypothesis
FIGURE 21.110 Block diagram of the valve.
FIGURE 21.111 Reference scheme of the flow rates through the proportional valve.
± X
V
max
± V
ref max
X
V
X
V
ref
V
ref
S
2
+ 2
n
s +
ζσ
σ
2
n
K
s
σ
2
n
Q
C1
Q
C2
Q
C1
Q
C2
Q
4
A
4
A
1
A
2
A
3
Q
1
Q
1
Q
2
Q
2
Q
3
Q
3
P
s
u
u
u
X
v
u
STT
Q
1
A
1
C
d
sign P
S
P
1
–()
2
ρ
---
P
S
P
1
–=
Q
4
A
4
C
d
sign P
1
P
T
–()
2
ρ
---
P
1
P
T
–=
Q
2
A
2
C
d
sign P
S
P
2
–()
2
ρ
---
P
S
P
2
–=
Q
3
A
3
C
d
sign P
2
P
T
–()
2
ρ
---
P
2
P
T
–=
Q
C1
Q
1
Q
4
–=
Q
C2
Q
3
Q
2
–=
9258_C021_Sect002-005.fm Page 81 Wednesday, October 10, 2007 7:10 PM