Bhushan B. Nanotribology and Nanomechanics: An Introduction
Подождите немного. Документ загружается.

1214 Bharat Bhushan
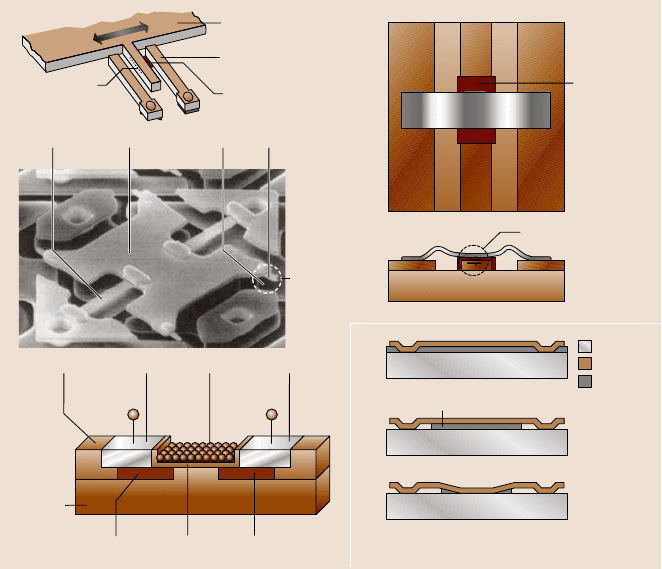
Millipede concept Single tip
Approaching/ thermal sensors
32× 32 array
Chip heater
2 mm
200μm
20μm
2μm
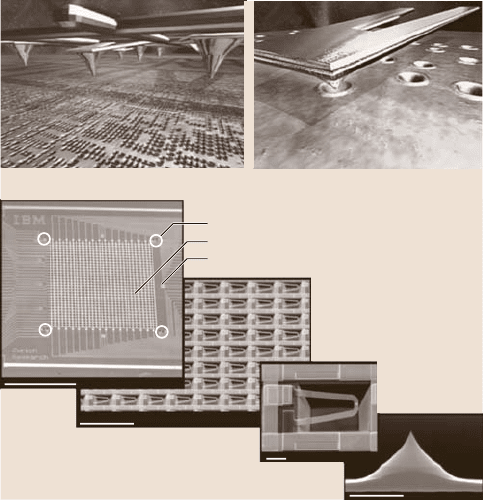
Fig. 22.6. Example of a NEMS device – AFM-probe-based nanoscale data storage system –
that experience tribological problems
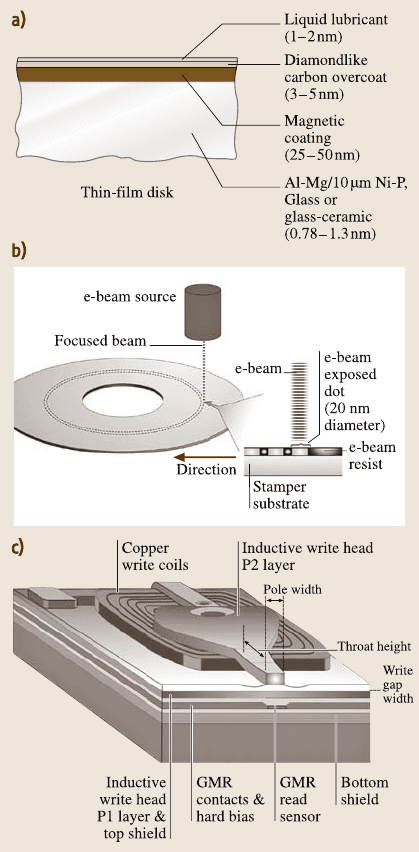
tional multigrain magnetic rigid disk. The superparamagnetic effect poses a serious
challenge for ever increasing areal density of disk drives. One of the promising
methods to circumvent the density limitations imposed by this effect is the use of
nanopatterneddisks Fig. 22.7b.In conventionaldisks, the thin magnetic layer forms
a random mosaic of nanometer-scale grains and each recorded bit consists of many
tens of these random grains. In patterned disks, the magnetic layer is created as an
ordered array of highly uniform islands, each island capable of storing an individual
bit. These islands may be one or a few grains, rather than a collection of random
decoupled grains. This increases the density by a couple of orders of magnitude.
Figure 22.7c shows a schematic of an inductive-write GMR read head structure.
These are constructed from a variety of materials: magnetic alloys, metal conduc-
tors, ceramic, and polymer insulators in a complex three-dimensionalstructure. The
multilayered thin-film structures used to construct the sensor and individual films
are only a few nm thick. The head slider surface, which flies over the disk surface,
is coated with diamond-like carbon coatings that are about 3 nm thick to protect the
thin-film structure from electrostatic discharge. Any isolated contacts between the
disk and sensor and lubricant pickup pose tribological concerns [34].
22 Characterization of MEMS/NEMS and BioMEMS/BioNEMS 1215
Fig. 22.7. Schematic of
(a) sectional view of a con-
ventional multigrain mag-
netic rigid disk, (b) nanopat-
terned magnetic rigid disk,
and (c) an inductive-write
GMR read magnetic head
structure for magnetic data
storage (Hitachi Global Stor-
age Technologies)
BioMEMS
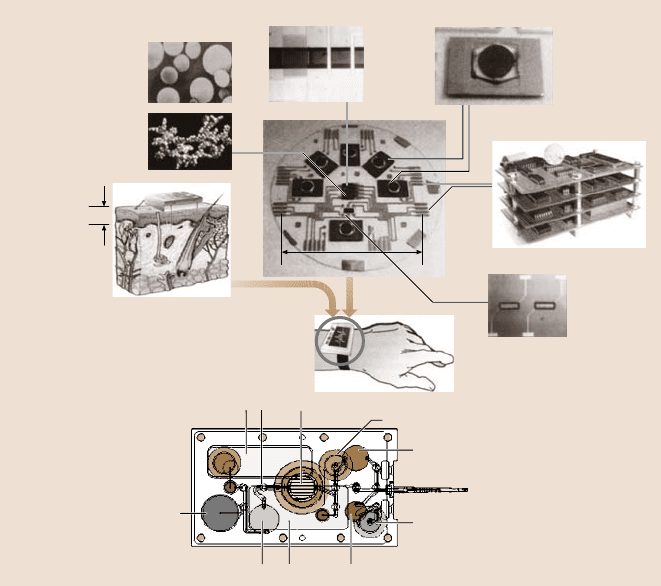
An example of a wristwatch-type biosensor based on microfluidics, referred to as
a lab-on-a-chip system, is shown in Fig. 22.8a [60,69]. These systems are designed
to either detect a single or class of (bio)chemicals, or system-level analytical cap-
abilities for a broad range of (bio)chemical species known as a micro total-analysis
system (µTas), andhavethe advantageof incorporatingsamplehandling,separation,
detection, and data analysis onto one platform. The chip relies on microfluidics and
1216 Bharat Bhushan
70–80μm
Magnetic beads
with dendrimer
Biofilter with immunosensor Microvalve
Control system and circuits
Flow sensor
Embedded
biofluidic
chips
Lab-on-a-chip
(Tang and Lee, [69])
75 mm
a)
Cassette type
(Taylor et al., [70])
b)
Wash Valve Filter region Elution chamber
Elution pump
PCR reaction tube
Post-PCR outlet
Post-PCR-pumpWasteFilter pump
Sample
Fig. 22.8. (a) MEMS-based biofluidic chip, commonly known as a lab-on-a-chip, that can
be worn like a wristwatch [69]. (b) Cassette-type biosensor used for human genomic DNA
analysis [70]
involvesmanipulationof tinyamounts offluids in microchannelsusing microvalves.
The test fluid is injected into the chip, generally using an external pump or syringe,
for analysis. Some chips have been designed with an integrated electrostatically ac-
tuated diaphragm-typemicropump.The sample,which can havea volumemeasured
in nanoliters, flows through microfluidicchannels via an electric potential and capil-
lary action using microvalves(havingvariousdesigns includingmembrane type)for
variousanalyses. The fluid is preprocessed and then analyzed usinga biosensor. An-
other exampleof a biosensoris the cassette-type biosensor used for human genomic
DNA analysis; integrated biological sample preparationis shown in Fig. 22.8b [70].
The implementation of micropumps and microvalves allows for fluid manipulation
and multiple sample-processing steps in a single cassette. Blood or other aqueous
solutions can be pumped into the system, where various processes are performed.
Microvalves, which are found in most microfluidic components of BioMEMS,
can be classified into two categories: active microvalves (with an actuator) for flow
regulation in microchannels and passive microvalves integrated with micropumps.
22 Characterization of MEMS/NEMS and BioMEMS/BioNEMS 1217
c)
Active electrostatic microvalve
Electrode Plates
Dielectric
Base Plate
Silicon
Closure Plate
Exhaust
Inlet Orifice
Passive mechanical check valves
Valveless micr
opump
Valve 1 Valve 2Diaphragm Piezo
disk
Diaphragm micropump
Inlet Outlet
Piezo discPiezo bimorph cantilever
Membrane valveFlap valve
Inlet
SpacerMembrane
Outlet
Pressure chamber
Upper
electrode
Lower
electrode
Electrostatic micropump
Rotary micropumps
(Ohnstein et al., 1990)
(Woias, [111])
(Bustgens et al., 2001)
(Stehr et al., [110]) (Nguyen et al., [112])
(Ohnstein et al., 1990)
(Ahn and Allen, 1995)
(Doepper et al., 1997)
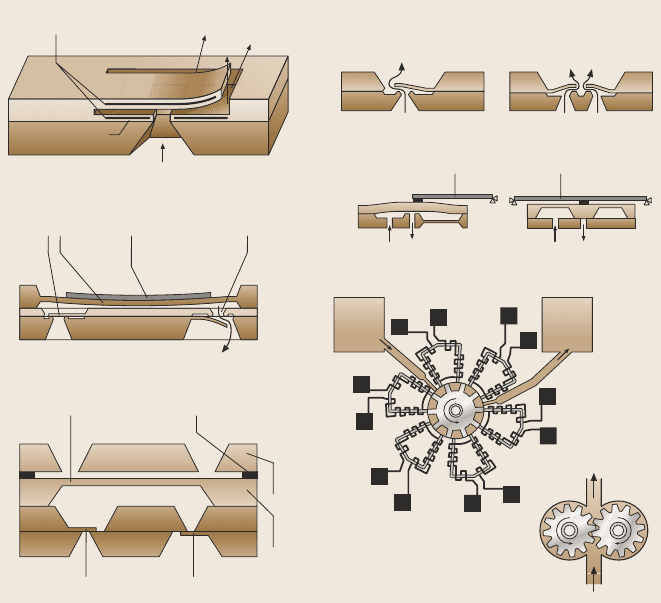
Fig. 22.8. (continued) (c) Multiple examples of valves and pumps found in BioMEMS de-
vices. Mechanical check valves, diaphragm micropump, valveless micropump, and rotary
micropump
Active microvalves consist of a valve seat and a diaphragm actuated by an external
actuator [61,109]. Different types of actuators are based on piezoelectric, electro-
static, thermopneumatic, electromagnetic, and bimetallic materials, shape-memory
alloys and solenoid plungers. An example of an electrostatic cantilever-type active
microvalveis shown in Fig. 22.8c. Passive microvalvesused in micropumpsinclude
mechanical check valves and a diffuser/nozzle [61, 109–112]. Check valves con-
sist of a flap or membrane that is capable of opening and closing with changes in
pressure; see Fig. 22.8c for schematics. A diffuser/nozzle uses an entirely different
principle and only works with the presence of a reciprocating diaphragm.When one
convergentchannel works simultaneously with another convergentchannel oriented
in a specific direction, a change in pressure is possible.
There are four main types of mechanical micropumps,which include diaphragm
micropumps that involves mechanical check valves, valveless rectification pumps
that use diffuser/nozzle-type valves, valveless pumps without a diffuser/nozzle,
1218 Bharat Bhushan
electrostatic micropumps, and rotary micropumps [61, 109–112]. Diaphragm mi-
cropumps consist of a reciprocating diaphragm, which can be piezoelectrically
driven, working in synchronization with two check valves Fig. 22.8c. Electrostatic
micropumps have a diaphragm as well, but it is driven using two electrodes. Valve-
less micropumps also consist of a diaphragm that is piezoelectrically driven, but
do not incorporate passive mechanical valves. Instead, these pumps use an elastic
buffermechanismor variablegap mechanisms.Finally, a rotarymicropumphas aro-
tating rotor that simply adds momentum to the fluid by the fast-moving action of the
bladesFig. 22.8c. Rotarymicropumpscan be drivenusing an integratedelectromag-
netic motor or by the presence of an external electric field. All of these micropumps
can be made of silicon or a polymer material.
During the operation of the microvalves and micropumps discussed above, ad-
hesion and friction properties become important in which contacts occur due to rel-
ative motion. During operation, active mechanical microvalves have an externally
actuated diaphragm which comes into contact with a valve seat to restrict the fluid
flow. Adhesion betweenthe diaphragm and valveseat will affect the operation of the
microvalve.In diaphragm micropumps,two passive mechanicalcheck valves are in-
corporated into the design. Passive mechanical check valves also exhibit adhesion
when the flap or membranecomes into contact with the valve seat when fluid flow is
removed.Adhesion also occurs during the operation of valveless micropumpswhen
the diaphragm, which is piezoelectrically driven, comes into contact with the rigid
outlet. Finally, adhesion and friction can also be seen during the operation of rotary
micropumps when the gears rotate, come into contact and rub against one another.
If the adhesion between the microchannel surface and the biofluid is high, the
biomolecules will stick to the microchannel surface and restrict flow. In order to
facilitate flow, microchannel surfaces with low bioadhesion are required. Fluid flow
in polymer channels can produce a triboelectric surface potential which may affect
the flow. Polymersare knownto generatesurfacepotentialsand themagnitudeof the
potential varies from one polymer to another [113–115]. Conductive surface layers
on the polymer channels can be deposited to reduce triboelectric effects.
As mentioned, the microfluidic biosensor shown in Fig. 22.8a required the use
of micropumps and microvalves. For example, a microdevice with 1000 channels
requires 1000 micropumps and 2000 microvalves, which makes it bulky and poses
reliability concerns. Two methods can be used to drive the flow of fluids in mi-
crochannels: pressure and electrokinetic drive. The electrokinetic flow is based on
the movement of molecules in an electric field due to their charges. There are two
components to electrokinetic flow: electrophoresis, which results from the accel-
erating force due to the charge of a molecule in an electric field, and electroos-
mosis, which uses electrically controlled surface tension to drive uniform liquid
flow. Biosensors based on electrokinetic flow have also been developed.In so-called
digital-based microfluidics, based on the electroosmosis process, electrically con-
trolled surface tension is used to drive liquid droplets, thus eliminating the need
for valves and pumps [116,117]. These microdevices consist of a rectangular grid
of gold nanoelectrodes instead of micro/nanochannels. An externally applied elec-
22 Characterization of MEMS/NEMS and BioMEMS/BioNEMS 1219
tric field enables manipulation of samples of a few nanoliters through the capillary
circuitry.
An exampleof a microarray-typebiosensorunder developmentin our laboratory
is that based on a field-effect transistor (FET), which is shown in Fig. 22.9 [72,118].
FETs are sensitive to the electrical field produced due to the charge at the surface
of the gate insulator. In this sensor, the gate metal of a metal–oxide–semiconductor
field-effect transistor (MOSFET) is removed and replaced with a protein (recep-
tor layer) whose cognate is the analyte (e.g., virus or bacteria) that is meant to be
sensed. The binding of the receptor layer with the analyte produces a change in
the effective charge, which creates a change in the electrical field. This electrical
field change may produce a measurable change in the current flow through the de-
vice. Adhesion between the protein and silica substrate affect the reliability of the
biosensor. In the case of implanted biosensors, the biosensors come in contact with
the exterior environment such as tissues and fluids, and any relative motion of the
sensor surface with respect to exterior environment such as tissues or fluids may
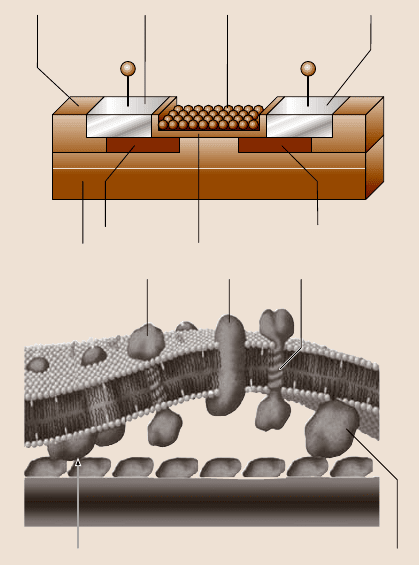
result in surface damage. A schematic of friction and points of wear generation
when an implanted biosensor surface comes into contact with living tissue is shown
in Fig. 22.9b. The, friction, wear, and adhesion of the biosensor surface may be
critical in these applications [72,119,120].
a)
Field
insulator
(SiO
2
)
Source
metal
(Al)
Receptor
biological
molecules
Drain
metal
(Al)
p
–
Si
Substrate
n
+
source Gate
insulator (SiO
2
)
n
+
drain
b)
Point of friction
Silicon dioxide
Biomolecule layer
Cell cytoplasm
Cell membrane Integral
protein
Hydrophobic
α
helix
Lipid-linked protein
Fig. 22.9. (a) Schematic of
MOSFET-based bioFET sen-
sor [72], and (b) schematic
showing the generation of
friction and wear points
due to interaction of im-
planted biomolecule layer on
a biosensor with living tissue
1220 Bharat Bhushan
Anchor region
Cell active area
Combination beam array
Anchor regions
Combination beam array
Cell active
area
Combination beam array
Anchor regions
100 μm
Fig. 22.10. Schematic of
two designs for polymer
bioMEMS structures to meas-
ure cellular forces [121]
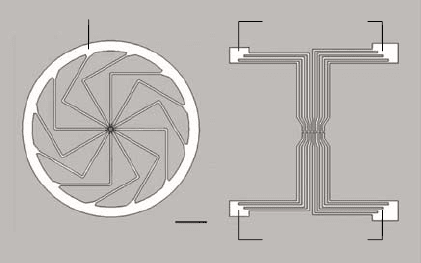
Polymer BioMEMS are designed to measure cellular surfaces. For two exam-
ples, see Fig. 22.10 [121]. The device on the left shows cantilevers anchored at the
periphery of the circular structure, while the device on the right has cantilevers an-
chored at the two corners on the top and the bottom.The cell adheres to the center of
the structure, and the contractile forces generated in the cells cytoskeleton cause the
cantilever to deflect. The deflection of the compliant polymer cantilevers is meas-
ured optically and related to the magnitude of the forces generated by the cell. Ad-
hesion between cells and polymer beam is desirable. In order to design the sensors,
micro- and nanoscale mechanical properties of polymer structures are needed.
BioNEMS
Micro/nanofluidic devices provide a powerful platform for electrophoretic separa-
tions for a variety of biochemical and chemical analysis. Electrophoresis is a versa-
tile analytical method which is used for separation of small ions, neutral molecules,
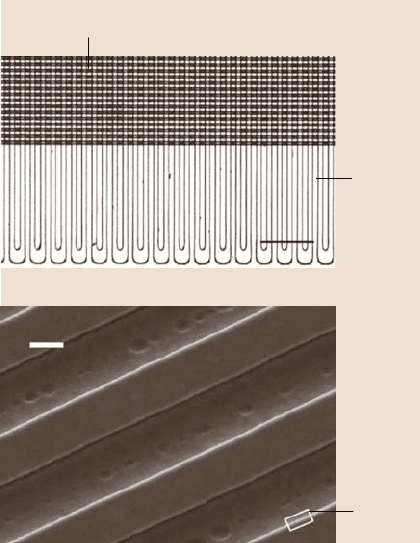
and large biomolecules. Figure 22.11 shows an interdigitated micro/nanofluidic
silicon array with nanochannels for the separation process. Figure 22.12a shows
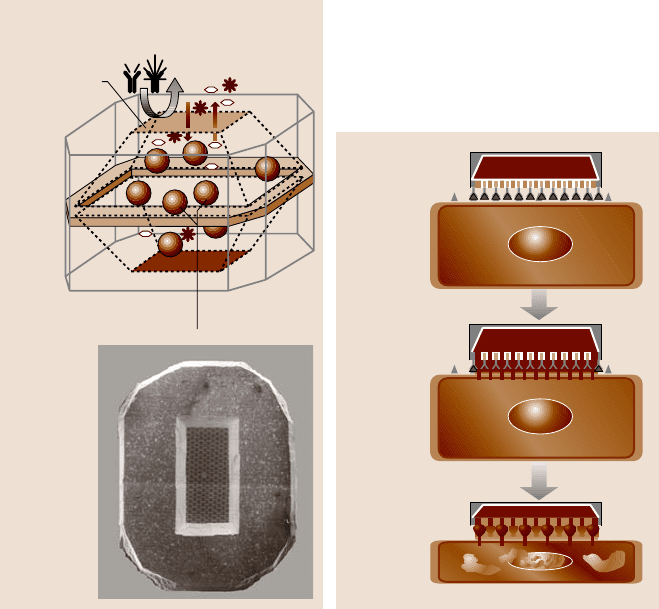
a schematicof an implantable,immuno-isolationsubmicroscopicbiocapsules,aimed
at drug deliveryto treat significant medical condition such as type I diabetes [76,77].
The purpose of the immuno-isolationbiocapsules is to create an implantable device
capable of supporting foreign living cells that can be transplanted into humans. It
is a silicon capsule consisting of two nanofabricated membranes bonded together
with the drug (e.g., encapsulated insulin-producingislet cells) contained within the
cavities for long-term delivery. Pores or nanochannels in a semipermeable mem-
brane as small as 6nm are used as flux regulatorsfor the long-term release of drugs.
The nanomembrane also protects therapeutic substances from attack by the body’s
immune system. The pores are large enough to provide the flow of nutrients (e.g.,
glucose molecules) and drug (e.g., insulin), but small enough to block natural anti-
bodies. Antibodies have the capability to pass through any orifice larger than 18 nm.
The 50-nm pores in silicon were etched by using the sacrificial-layer lithography
described in Sect. 22.A [77].
The main reliability concerns in the micro/nanofluidic silicon array and im-
plantable biocapsules are biocompatibility and potential biofouling(undesirable ac-
22 Characterization of MEMS/NEMS and BioMEMS/BioNEMS 1221
Nanochannels for separation process
Interdigitated micro/nanofluidic array
Micro-
channels
50 μm
Nano-
channel
Exploded view of silicon nanochannels
1 μm
Fig. 22.11. Interdigitated
micro/nanofluidic silicon
array for the separation pro-
cess [118]
cumulation of microorganisms) of the channels/membraneby means of protein and
cells adsorption from biological fluids. Biofouling can also result in the clogging
of the nanochannels/nanopores, which potentially could render the device inef-
fective. The adhesion of proteins and cells to an implanted device can also cause
detrimental results such as inflammation and excessive fibrosis. Deposition of the
self-assembled monolayers of selected organic molecules on the channels implants,
which makes them hydrophobic, presents an innovative solution to combat the ad-
verse effects of the biological fluids [122–125].
Figure 22.12b shows a conceptual model of an intravascular drug-delivery de-
vice – nanoparticles used to search for and destroy disease cells [78]. With lateral
dimensions of 1µm or less, the particles are smaller than any blood cells. These
particles can be injected into the blood stream and travel freely through the circu-
latory system. In order to direct these drug-delivery nanoparticles to cancer sites,
their external surfaces are chemically modified to carry molecules that have lock-
and-key binding specificity with molecules that support a growing cancer mass. As
soon as the particles dock onto the cells, a compound is released that forms a pore
on the membrane of the cells, which leads to cell death and ultimately to that of
the cancer mass that was being nourished by the blood vessel. Adhesion between
nanoparticles and disease cells is required. Furthermore, the particles should travel
close to the endothelium lining of vascular arteries. Decuzzi et al. [126] recently
1222 Bharat Bhushan
Immune molecules retained outside;
glucose, nutrients and insulin pass freely
Size-selective
nanoporous
membrane
Encapsulated
islet cells
One half
of biocapsule
a)
1. Binding
(0 – 8 h
after
injection)
2. Plug
rupture,
drug
release
(12 – 48h)
3. Pore
formation –
cell lysis
and death
(12 – 48h)
b)
Fig. 22.12. Schematics of (a) implantable, immuno-isolation submicroscopic biocapsules
(drug-delivery device) [77], and (b) intravascular nanoparticles to search for and destroy dis-
eased blood cells [78]
analyzed the margination of a particle circulating in the blood stream and calculated
the speed and time for margination (motion of the particles towards the walls of the
vessel) as a function of the density and diameter of particle, based on various forces
present between thecirculating particle and theendothelium lining. Humancapillar-
ies can have radii as small as 4–5µm. They reported that the particles used for drug
delivery should have a radius smaller than a critical value (of the order 100nm).
In summary, adhesion, stiction/friction and wear clearly limit the lifetime and
compromise the performance and reliability of MEMS/NEMS and BioMEMS/
BioNEMS. Figure 22.13a summarizes tribological problems encountered in some
of the MEMS, MOEMS, RF-MEMS, and BioMEMS devices discussed. In add-
ition to in-use stiction, stiction issues are also present in some processes used for
fabrication of MEMS/NEMS. For example, the last step in surface micromachin-
ing involves the removal of sacrificial layer(s), known as the release process, since
the microstructures are released from the surrounding sacrificial layer(s). The re-
22 Characterization of MEMS/NEMS and BioMEMS/BioNEMS 1223
a)
Suspended
mass
Stationary
plates
Hinge Yoke
Tip
Landing site
Impact/wear
Stiction
(meniscus
effects)
Stiction
and wear
Field
insulator
(SiO
2
)
Source
metal
(Al)
Receptor
biological
molecules
Drain
metal
(Al)
p
–
Si
Substrate
n
+
source Gate
insulator
(SiO
2
)
n
+
drain
RF
Micro-
switch
Side
view
Highly resistive substrate
Off-state
Stiction and wear
Top view
GND
RF out
RF in
Flexible
metal bridge
signal
line
Dielectric
GND
Unreleased beam
Rinse liquid
Released beam before drying
Released beam collapsed to substrate
due to meniscus forces during drying
b)
Silicon
Polysilicon
Sacrificial
material
Fig. 22.13. (a) Summary of tribological issues in MEMS, MOEMS and RF-MEMS device
operation, and (b) in microfabrication via surface micromachining
lease is accomplished by an aqueous chemical etch, rinsing and drying processes.
Due to meniscus effects as a result of wet processes, the suspended structures can
sometimes collapse and permanently adhere to the underlying substrate, as shown
in Fig. 22.13b [127]. Adhesion is caused by water molecules adsorbed on the adher-
ing surfaces and/or because of the formation of adhesive bonds by silica residues
that remain on the surfaces after the water has evaporated. This so-called release
stiction is overcome by using dry release methods (e.g., CO
2
critical-point drying
or sublimation drying [128]).
Tribological Needs
MEMS/NEMS need to be designed to perform expected functions typically in
the millisecond to picosecond range. Expected life of the devices for high-speed
contacts can vary from a few hundred thousand to many billions of cycles, e.g.,
over a hundred billion cycles for DMDs, which puts serious requirements on
materials [13, 91, 129–132]. Adhesion between a biological molecular layer and
the substrate, referred to as bioadhesion, reduction of friction and wear of bio-