Барков Ю.А., Зверев О.М., Перминов А.В. Сборник задач по общей физике
Подождите немного. Документ загружается.

71
нением величины на этом промежутке можно было пренебречь (ри-
сунок). Таким образом, приближенно на участке d
М можно L счи-
тать постоянной (L = const).
Тогда
dK = L(M) · dM,
где dK – изменение величины K на участке dM.
Используя принцип суперпозиции (суммируя величины по
всем участкам изменения величины
М), получаем значение величи-
ны K в виде
()
2
1
d,
M
M
KLMM
=
∫
где М
1
и М
2
– начальное и конечное
значения величины
М. Таким образом, метод ДИ состоит из двух
частей. В первой
находят дифференциал искомой величины. Для
этого в большинстве случаев производят или деление тел на столь
малые части, чтобы последние можно было принять за материаль-
ные точки, или деление большого промежутка времени на такие
малые промежутки времени dt, чтобы в течение этих малых проме-
жутков процесс можно было п р и б л и ж е н н о считать равно-
мерным (или стационарным), и т. д.
Во второй части метода
производят суммирование (ин-
тегрирование). Наиболее трудными в этой части являются выбор
переменной интегрирования и определение пределов интегрирова-
ния. Для определения переменной интегрирования необходимо де-
тально проанализировать, от каких переменных зависит дифферен-
циал искомой величины и какая переменная является главной, наи-
более существенной. Эту переменную чаще всего и выбирают в
качестве переменной при интегрировании. После этого все осталь-
ные переменные выражают как функции от этой переменной. В ре-
зультате
дифференциал искомой величины принимает вид функции
от переменной интегрирования. Затем определяют пределы интег-
рирования как крайние (предельные) значения переменной интег-
рирования. После вычисления определенного интеграла получают
числовое значение искомой величины.
Третью группу составляют задачи на определение емкости,
потенциала или заряда какого-либо тела, расчет соединений кон-
денсаторов и энергии электрического поля.
72
Если по условию задачи дано одно заряженное тело, то вели-
чины, характеризующие электрические свойства тела, связаны меж-
ду собой известными формулами:
q
C
U
=
,
0
εε
S
C
d
⋅⋅
=
,
22
.
222
qU CU q
W
C
⋅⋅
== =
⋅
С учетом зависимости потенциала от величины заряда эти
формулы позволят найти одни из величин, если другие заданы.
Следует иметь в виду, что если плоский конденсатор подклю-
чить к источнику питания, зарядить его и затем отключить, то при
изменении емкости конденсатора
С вследствие раздвижения (сбли-
жения) пластин, внесения (удаления) диэлектрика заряд на конден-
саторе не меняется. Что при этом происходит с напряжением U или
энергией конденсатора
Е легко установить, анализируя вышеприве-
денные формулы.
Если же конденсатор подключен к источнику по-
стоянного напряжения, то при всех изменениях емкости конденса-
тора напряжение между его пластинами остается неизменным.
Основные формулы
1. Закон Кулона:
12 12 12
12 21
22
; ,
π
εε
π
εε
q
qr qq
FF F
r
rr
=− = ⋅ ⋅ =
G
GG
00
11
4 4
где
12
F
G
– сила, с которой заряд q
1
действует на заряд q
2
;
21
F
G
– равная
ей и противоположно направленная сила;
12
r
G
– радиус-вектор, на-
правленный от q
1
к q
2
; r – модуль
12
r
G
; ε – диэлектрическая прони-
цаемость среды,
0
ε
E
E
=
; Е
0
– напряженность электростатического
поля в вакууме;
Е – напряженность электростатического поля внут-
ри однородного диэлектрика; ε
0
– электрическая постоянная.
2. Напряженность электрического поля и потенциал:
П
, φ
,
F
W
E
q
q
==
G
G

73
где W
п
– потенциальная энергия положительного точечного заряда
q, находящегося в данной точке поля.
Сила, действующая на точечный заряд q, находящийся в элек-
трическом поле, и потенциальная энергия этого заряда
;
FqE
=
G
G
W
п
= qϕ.
3. Напряженность и потенциал поля, создаваемого точечным
зарядом q:
2
, φ
,
πε ε πε ε
qq
E
rr
==
00
44
где r – расстояние от заряда q до точки, в которой определяются
напряженность или потенциал.
4. Напряженность и потенциал поля, создаваемого системой
точечных зарядов (принцип суперпозиции полей):
11
; φφ
,
nn
i
i
ii
EE
==
==
∑∑
GG
где
,
i
E
G
ϕ
i
– напряженность и потенциал в данной точке поля, созда-
ваемого i-м зарядом.
5.
Напряженность и потенциал поля, создаваемого сферой ра-
диусом R на расстоянии r от центра сферы:
а) 0; φ (при
);
4πε ε
q
ErR
R
== <
0
б)
2
; φ (при
);
4πε ε 4πε ε
qq
E
rR
RR
== =
00
в)
2
; φ (при
),
4πε ε 4πε ε
qq
E
rR
rr
== >
00
где q – заряд сферы.
6.
Линейная плотность заряда
τ dd
ql
=
или τ = q/l.
Поверхностная плотность заряда
σ dd
qS
=
или σ = q/S.
Объемная плотность заряда
ρ
dd
qV
=
или ρ = q/V.
Связь заряда и плотностей dq = σdS = τd l= ρdV.
74
7. Напряженность и потенциал поля, создаваемого распреде-
ленными зарядами. Если заряд равномерно распределен вдоль ли-
нии с линейной плотностью τ, то на линии выделяется малый уча-
сток длиной dl с зарядом dq = τdl. Такой заряд можно рассматри-
вать как точечный и применять формулы:
2
ττd
d;dφ
,
4πεε
4
πεε
rl
E
rr r
==
G
G
00
где
r
G
– радиус-вектор, направленный от выделенного элемента dl
к точке, в которой вычисляется напряженность; r – его модуль.
Используя принцип суперпозиции электрических полей, нахо-
дим интегрированием напряженность
E
G
и потенциал ϕ поля, созда-
ваемого распределенным зарядом:
2
τ
d
τ
d
; φ
.
4ππε 4ππε
ll
lr l
E
rr r
==
∫
∫
G
G
00
Интегрирование ведется вдоль всей длины l заряженной линии.
8. Напряженность поля, создаваемого бесконечно прямой рав-
номерно заряженной линией или бесконечно длинным цилиндром,
τ
,
ππε
E
=
0
2 r
где r – расстояние от нити или оси цилиндра до точки, в которой
определяется напряженность поля.
Напряженность поля, создаваемого бесконечной равномерно
заряженной плоскостью,
σ
2εε
E
=
0
.
Электрическое смещение (электрическая индукция)
εε
DE
=
G
G
0
.
Теорема Гаусса:
0
1
d
εε
ni
S
ES q
=
∑
∫v
или
d
ni
S
D
S
q
=
∑
∫v
.
75
10. Связь потенциала с напряженностью:
а)
φE =−
G
grad или
φφφ
()
Ei j k
x
yz
∂∂∂
=− + +
∂∂∂
G
G
GG
в общем случае,
где
i
G
,
j
G
,
k
G
– единичные векторы вдоль осей координат (орты);
б)
12
φφ
E
d
−
=
в случае однородного поля;
в)
dφ
d
E
r
=−
в случае поля, обладающего центральной или
осевой симметрией.
11. Электрический момент диполя
,
Pql
=
G
G
где q – заряд; l – плечо диполя (векторная величина, направленная
от отрицательного заряда к положительному и численно равная
расстоянию между зарядами).
12. Работа сил поля по перемещению заряда q из точки поля
с потенциалом ϕ
1
, в точку с потенциалом ϕ
2
()
2
1
212
1
d φφ
l
AqElq==−
∫
.
13. Электроемкость уединенного тела и конденсатора
С =
,
φ
q
С =
,
q
U
где ϕ – потенциал проводника; U – разность потенциалов пластин
конденсатора.
Следует помнить, что при изменении электрической емкости
конденсатора, подключенного к источнику напряжения, меняется
величина заряда на его пластинах, а разность потенциалов остается
постоянной и равной ЭДС источника тока. При изменении емкости
конденсатора, отключенного от источника напряжения, меняется
разность потенциалов на его пластинах, а величина заряда остается
при этом неизменной.
76
Электроемкость плоского конденсатора
C =
εε
S
d
0
,
где S – площадь одной пластины конденсатора; d – расстояние меж-
ду пластинами.
Электроемкость батареи конденсаторов:
а)
1
11
N
i
i
CC
=
=
∑
при последовательном соединении;
б)
1
N
i
i
CC
=
=
∑
при параллельном соединении,
где N – число конденсаторов в батарее.
Энергия заряженного конденсатора:
2
2
222
qU CU q
W
C
== =,
2
εε
,
WEV
=
0
1
2
где V – объем конденсатора.
Объемная плотность энергии электрического поля
2
0
0
εε
2
W
E
w
V
==
.
Примеры решения задач
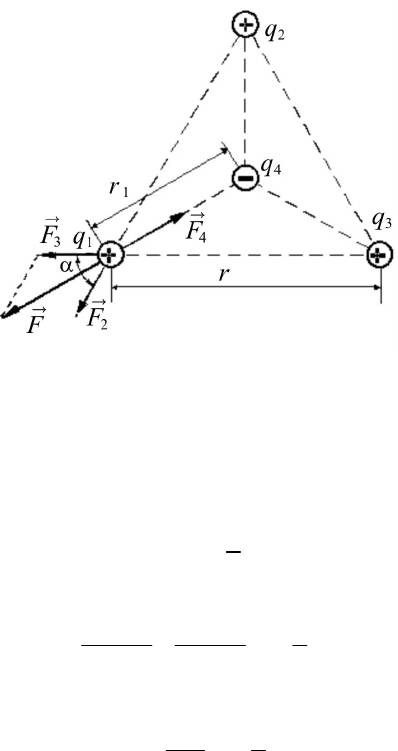
№ 1.
Три точечных заряда q
1
= q
2
= q
3
= 1 нКл расположены
в вершинах равностороннего треугольника. Какой заряд q
4
нужно
поместить в центре треугольника, чтобы указанная система зарядов
находилась в равновесии?
Р е ш е н и е.
Все три заряда, расположенные по вершинам треугольника,
находятся в одинаковых условиях. Поэтому достаточно выяснить,
какой заряд следует поместить в центре треугольника, чтобы какой-
нибудь один из трех зарядов, например q
1
, находился в равновесии.
77
Заряд q
1
будет находиться в равновесии, если векторная сумма дей-
ствующих на него сил равна нулю:
234 4
0
FFFFF++=+=
G
GGGG
, (1)
где
2
F
G
,
3
F
G
,
4
F
G
– силы, с которыми соответственно действуют на
заряд q
1
заряды q
2
, q
3
, q
4
;
F
G
– равнодействующая сил
2
F
G
и
3
F
G
.
Так как силы
F
G
и
4
F
G
направлены по одной прямой в проти-
воположные стороны, то векторное равенство (1) можно заменить
скалярным равенством F – F
4
= 0, откуда
F
4
= F.
Выразив в последнем равенстве F через F
2
и F
3
и учитывая,
что F
3
= F
2
, получим
42
α
2cos
2
FF F== .
Применяя закон Кулона и имея в виду, что q
2
= q
3
= q
1
, найдем
2
14 1
22
1
α
,
πε πε
qq q
rr
=
00
cos
44
2
2
откуда
2
11
4
2
αqr
q
r
=
cos2
2
. (2)
78
Из геометрических построений в равностороннем треуголь-
нике (α = 60°) следует, что
1
α
r
rr
r == =
°cos30
3
cos
2
2
2
.
С учетом этого формула (2) примет вид
1
4
3
q
q = .
Подставив числовое значение q
1
= 1 нКл = 10
–9
Кл, получим
4
пКлq
−
−
==⋅=
9
10
10
5,77 10 577
3
.
Следует отметить, что равновесие системы зарядов будет не-
устойчивым.
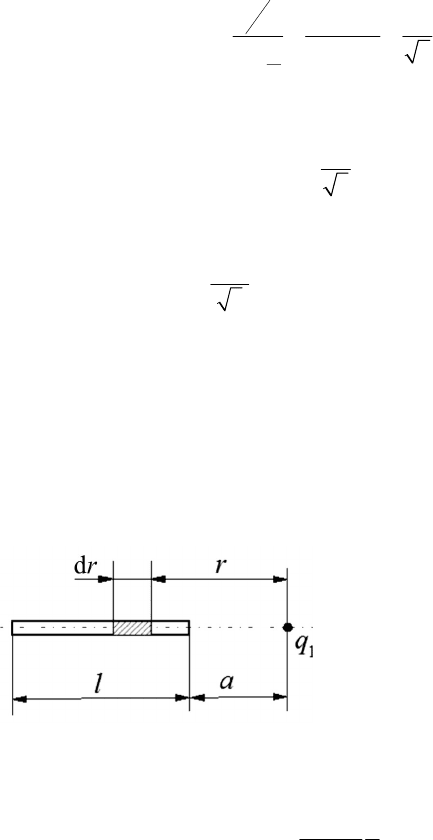
№ 2. Тонкий стержень длиной l = 20 см несет равномерно
распределенный заряд. На продолжении оси стержня на расстоянии
а = 10 см от ближайшего конца находится точечный заряд q
1
= 40 нКл,
который взаимодействует со стержнем с силой F = 6 мкН. Опреде-
лить линейную плотность τ заряда на стержне.
Р е ш е н и е.
При вычислении силы F
следует иметь в виду, что заряд
на стержне не является точеч-
ным, поэтому закон Кулона не-
посредственно применить нель-
зя. Применим метод ДИ. Выде-
лим на стержне малый участок dr
с зарядом dq = τdr. Этот заряд можно рассматривать как точечный.
Тогда, согласно закону Кулона,
1
2
τd
d
πε
qrr
F
rr
=
G
G
0
4
, (1)
79
где
d
F
G
– сила взаимодействия заряда q
1
и заряда, участка dr. Так
как все
d
F
G
сонаправлены, можно воспользоваться скалярным вы-
ражением для
d:
F
G
1
2
τ
d
d.
πε
qr
F
r
=
0
4
(2)
Интегрируя это выражение в пределах от а до а + l, получим
l
11 1
2
τ d ττ
πε πε
l
πε
()
a
a
qrq ql
F
raa aal
+
==−=
++
∫
00 0
11
44 4
,
откуда интересующая нас линейная плотность заряда
1
πε
()
τ
a
al
F
ql
+
=
0
4
.
Выразим все величины в единицах СИ: q
1
= 40 нКл = 4·10
–8
Kл,
F = 6
мкН = 6·10
–6
Н, l = 0,2 м, а = 0,1 м,
0
9
1
4πε
910
=
⋅
Ф/м,
ε
0
= 8,85·10
–12
Ф/м.
Подставим числовые значения величин в полученную форму-
лу и произведем вычисления:
()
τ
−
−
⋅+ ⋅⋅
=
⋅⋅⋅ ⋅
6
98
0,1 0,1 0, 2 6 10
910 410 0,2
Кл/м = 2,5·10
–9
Кл/м = 2,5 нКл/м.
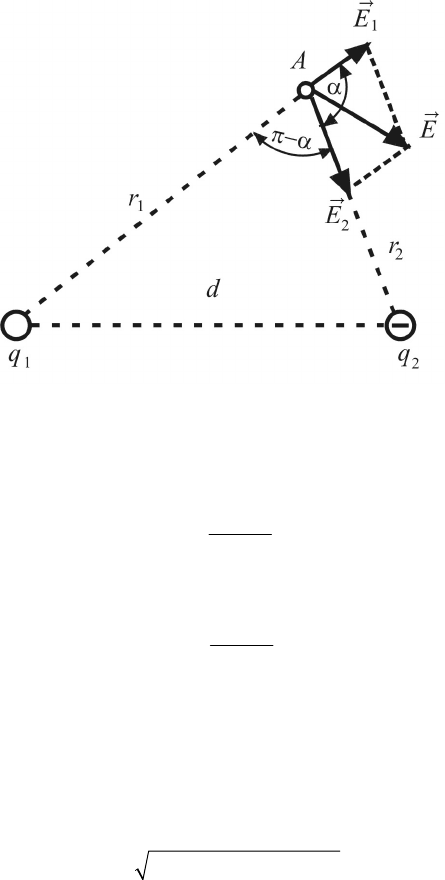
№ 3
. Два точечных электрических заряда q
1
= 1 нКл и q
2
=
= –2 нКл находятся в воздухе на расстоянии
d = 10 см друг от друга.
Определить напряженность
Е
G
и потенциал φ поля, создаваемого
этими зарядами в точке
А, удаленной от заряда q
1
на расстоянии
r
1
= 9 см и от заряда q
2
на r
1
= 7 см.
Р е ш е н и е.
Согласно принципу суперпозиции электрических полей, ка-
ждый заряд создает поле независимо от присутствия в пространст-
ве других зарядов. Поэтому напряженность
Е
G
электрического по-
ля в искомой точке может быть найдена как геометрическая сумма
80
напряженностей
1
Е
G
и
2
Е
G
полей, создаваемых каждым зарядом
в отдельности:
12
Е
ЕЕ=+
GG G
. Напряженность электрического поля,
создаваемого в воздухе (ε = 1) зарядом q
1
,
1
1
2
1
πε
q
E
r
=
0
4
, (1)
зарядом q
2
–
2
2
2
2
πε
q
E
r
=
0
4
. (2)
Вектор
1
Е
G
направлен по силовой линии от заряда q
1
, так как
заряд q
1
положителен; вектор
2
Е
G
направлен также по силовой ли-
нии, но к заряду q
2
, так как заряд q
2
отрицателен.
Абсолютное значение вектора
Е найдем как следствие из тео-
ремы косинусов:
22
12 12
2cosαEEE EE=++ , (3)
где α – угол между векторами
1
Е
G
и
2
Е
G
, который может быть найден
из треугольника со сторонами r
1
, r
2
и d по теореме косинусов: