Atkinson K. An Introduction to Numerical Analysis
Подождите немного. Документ загружается.

~-I
I
STIFF DIFFERENTIAL EQUATIONS AND
THE
METHOD
OF
LINES
411
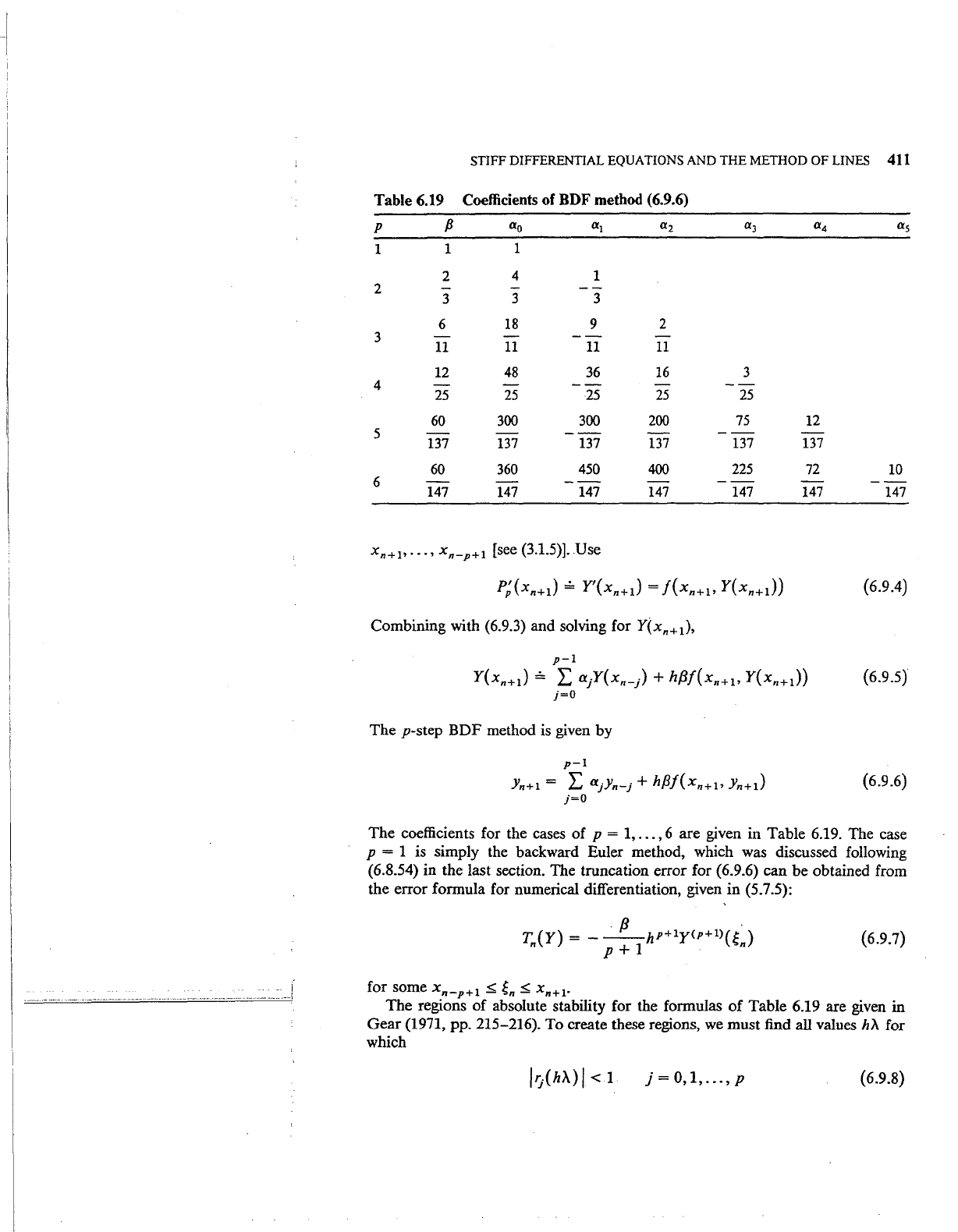
Table
6.19
Coefficients of
BDF
method (6.9.6)
p
{3
ao a!
a2
aJ
a4
1
1
1
2
4 1
2
-
-
3
3 3
6
18
9
2
3
11
11
11
11
12
48
36
16
3
4
25
25
25
25
25
60
300 300
200
75
12
5
137
137
137
137
137
137
60
360
450
400
225
72
6
147
147
147
147
147 147
xn+I•···•
xn-p+l
{see
(3.1.5))
.. Use
Combining with (6.9.3) and solving for Y(xn+
1
),
p-1
Y(xn+l)
='=
L
ajY(xn-)
+
h/3/(xn+l•
Y{xn+
1
))
j=O
The p-step
BDF
method
is
given by
p-1
Yn+l
= L
ajYn-j
+
h/3/(xn+l•
Yn+l)
j=O
as
10
147
(6.9.4)
{6.9.5)
{6.9.6)
The coefficients for the cases of p = 1,
...
, 6 are given in Table 6.19. The case
p
= 1 is simply the backward Euler method, which was discussed following
(6.8.54) in the last section. The truncation error for (6.9.6) can be obtained from
the error formula for numerical differentiation, given in (5.7.5):
(6.9.7)
for some
xn-p+l
,:5;
~n
,:5;
xn+l·
The regions of absolute stability for the formulas
of
Table 6.19 are given in
Gear
(1971, pp.
215-216).
To create these regions,
we
must find all values
hA
for
which
llj(h:\)
I<
1
j=0,1,
...
,p
(6.9.8)
I
I
I
l
l
I
•
I
.....
----
--
--
-
_____
I
412 NUMERICAL METHODS FOR ORDINARY DIFFERENTIAL EQUATIONS
where the characteristic roots rj(h'A) are the solutions of
p-1
rP
= L
ajrp-l-j
+
hA.f3rP
j-0
{6.9.9)
It
can
be
shown that for p = 1 and p =
2,
the BDFs are A-stable, and that for
3
~
p
~
6, the region of absolute stability becomes smaller
as
p increases,
although containing the entire negative real axis
in each case.
For
p
;;:::
7, the
regions
of
absolute stability are not acceptable for the solution
of
stiff problems.
For
more discussion of these stability regions, see Gear (1971, chap. 11) and
Lambert (1973, chap.
8).
There are still problems with the BDF methods and with other methods that
are chosen solely on the basis of their region
of
absolute stability. First, with the
model equation
y'
=
A.y,
if Real('A)
is
of large magnitude and negative, then the
solution Y(x) goes to the zero very rapidly, and
as
!Real('A)i increases,
the convergence to zero of
Y(
x)
becomes more rapid.
We
would like the same
behavior to hold for the numerical solution of the model equation {
y,
}.
But with
the A-stable trapezoidal rule, the solution [from (6.5.24)]
is
[
h'A
]"
1+-
Y, = h
2
A
Yo
1--
2
n;::.:O
If
!Real(A)f is large, then the fraction inside the brackets is near to
-1,
andy,
decreases to 0 quite slowly. Referring to the type
of
argument used with the Euler
method in (6.8.45)-(6.8.50), the effect
of
perturbations will not decrease rapidly
to zero for larger values of
A.
Thus the trapezoidal method may not be a
completely satisfactory choice for stiff problems.
In
comparison the A-stable
backward Euler method has the desired behavior.
From
(6.8.55), the solution of
the model problem
is
[
1
..
] "
Yn
=
1
_
hA
Yo
n;::.:O
As
IAI
increases, the sequence
{y,}
goes to zero more rapidly. Thus the
backward Euler solution better reflects the behavior of the true solution of the
model equation.
A second problem with the case of stability regions is that
it
is
based
on
using
constant A
and
linear problems. The linearization (6.9.1) is often valid, but not
always.
For
example, consider the second-order linear problem
y"
+ ay' +
(1
+ b · cos(27rx})y =
g(x)
x;::.:O
(6.9.10)
in which
onl!
coefficient is not constant. Convert it
to
the equivalent system
Y2
=
-(1
+ b · cos{27rx))y
1
-
ay
2
+
g(x)
(6.9.11)
STIFF DIFFERENTIAL EQUATIONS AND THE METHOD
OF
LINES 413
We
will assume a >
0,
1 b 1 < 1.
The
eigenvalues
of
the homogeneous
equation
[g(x)
=
0]
are
-a±
Ja
2
-
4[1 + b
·cos
(2'1Tx)]
;\.
=
---'----------
2
(6.9.12)
These
are
negative real numbers
or
are complex numbers with negative real parts.
On
the
basis
of
the stability theory for the
constant
coefficient
(or
constant
A)
case, we would assume
that
the
effect
of
all perturbations
in
the
initial
data
would
die
away
as x
--+
oo.
But
in fact,
the
homogeneous
part
of
(6.9._10)
will
have
unbounded
solutions.
Thus
there will
be
perturbations
of
the
initial values
that
will
lead
to
unbounded
perturbed
solutions
in
(6.9.10). This calls
into
question
the
validity
of
the
use
of
the
model
equation
y'
= ;\.y +
g(x).
Its use
suggests
methods
that
we
may
want
to
study
further,
but
by
itself, this
approach
is
not
sufficient to encompass
the
vast variety
of
linear
and
nonlinear
problems.
The
example
(6.9.10) is taken from Aiken (1985, p. 269).
Solving
the
finite difference method
We
illustrate
the
problem
by
considering
the
backward
Euler method:
Yn+1
=
Yn
+ hj(xn+1•
Yn+1)
If
the
ordinary
iteration formula
(j+l)
- +
hif(
(j)
)
Yn+I
-
Yn
xn+I• Yn+I
is used,
then
n:::::O
_
U+l),;,
h
aj(xn+l•
Yn+I) ( _
Ul]
Yn+l
Yn+l
ay
Yn+l Yn+l
For
convergence,-we would need
to
have
(6.9.13)
(6.9.14)
(6.9.15)
But
with
stiff equations, this would again force h
to
be
very small, which we are
trying
to
avoid.
Thus
another
rootfinding
method
must
be
used
to
solve for Yn+l
in
(6.9.13).
The
most
popular
methods for solving (6.9.13) are
based
on
Newton's
method.
For
a single differential equation,
Newton's
method
for
finding Yn+l is
{6.9.16)
for
j::::: 0. A
crude
initial guess is
y~~
1
=
Yn•
although generally this
can
be
improved
upon.
With
systems
of
differential equations
Newton's
method
be-
comes
very expensive.
To
decrease
the
expense,
the
matrix
some
z,;,
Yn
(6.9.17)
;
i
I
I
I
I
.
..
---
.... 1
414 NUMERICAL METHODS FOR ORDINARY DIFFERENTIAL EQUATIONS
is used for all j and for a number of successive values of
n.
Thus Newton's
method [see
Section
2.11]
for solving the system version of (6.9.13) is approxi-
mated by
{6.9.18)
YHil>
=
y~{\
+
a<n
for j
~
0.
This amounts to solving a number
of
linear systems with the same
coefficient matrix. This can be done much more cheaply than when the matrix is
being modified (see the material in Section 8.1).
The
matrix in (6.9.17) will have
to be
updated
periodically,
but
the savings will still be very significant when
compared to an exact Newton's method.
For
a further discussion of this topic,
see Aiken
(1985, p.
7)
and
Gupta
et al. (1985, pp. 22-25). For a survey of
computer codes for solving stiff differential equations, see Aiken
(1985, chap. 4).
The method
of
lines Consider the following parabolic partial differential equa-
tion problem:
U{O,
t) = d
0
{t)
U(x,O)
=
f(x)
O<x<1
O~x~1
t>O
t
~
0
{6.9.19)
( 6.9.20)
{6.9.21)
The
notation
U,
and
Uxx
refers to partial derivatives with respect to t and
x,
respectively.
The
unknown function U(x,
t)
depends on the time t and a spatial
variable
x.
The
conditions (6.9.20) are called boundary conditions, and (6.9.21)
is
called
an
initial condition. The solution U can
be
interpreted as the temperature
of
an insulated rod of length
1,
with U(x,
t)
the temperature
at
position x
and
time
t;
thus (6.9.19) is often called the heat equation. The functions G, d
0
,
d
1
,
and
f are assumed given and smooth.
For
a development of the theory of
(6.9.19)-(6.9.21), see Widder (1975) or any standard introduction to partial
differential equations. We give the
method
of
lines for solving for
U,
a numerical
method that has become much more popular in the past ten to fifteen years.
It
will also lead to the solution of a stiff system
of
ordinary differential equations.
Let
m > 0
be
an integer, and define 8 =
1/m,
j=0,1,
...
,m
We discretize Eq. (6.9.19) by approximating
the
spatial derivative. Recall the
formulas
(5.7.17) and (5.7.18) for approximating second derivatives. Using this,
8i
a
4
U(
~
1
•
t)
12
ax
4
for j = 1, 2,
...
, m -
1.
Substituting into (6.9.19),
( )
_·
U(xJ+l•
t)-
2U(x
1
,
t) +
U(x
1
_
1
,
t) ( )
U,
x
1
,
t -
82
+ G x
1
,
t
8
2
a
4
u(~
1
.t)
12
ax
4
1~j~m-1
{6.9.22)
STIFF DIFFERENTIAL EQUATIONS AND THE METHOD OF LINES 415
Equation (6.9.I9)
is
to
be approximated at each interior node point
xj.
The
unknown
~j
E
fxj-I•
xj+d·
Drop the
final
term in (6.9.22), the truncation error in the numerical differenti-
ation. Forcing equality in the resulting approximate equation,
we
obtain
(6.9.23)
for j
=I,
2,
...
,
m-
I.
The functions
u/t)
are intended to be approximations
of
U(xp
t ), I
~
j
~
m -
I.
This
is
the method
of
lines approximation to (6.9.I9),
and it
is
a system of m - I ordinary differential equations. Note that u
0
(t)
and
um(t), which are needed in (6.9.23) for j = 1 and j =
m-
1, are given using
(6.9.20):
(6.9.24)
The initial condition for (6.9.23)
is
given by (6.9.21):
I
~j
~
m-
1
(6.9.25)
The name method
of
lines comes from solving for
U(x,
t)
along the lines
(xj.
t),
t
~
0,
1
~
j
~
m - I, in the
(x,
t)-plane.
Under suitable smoothness assumptions
on
the functions d
0
,
d
1
,
G,
and
f,
it
can be shown that
M.ax
ju(xj, t) -
u/t)
I~
Cr~
2
Os;Js;m
Os; cs; T
(6.9.26)
Thus to complete the solution process,
we
need only solve the system (6.9.23).
It
will
be convenient
to
write (6.9.23) in matrix form. Introduce
-2
I 0 0 0
1
-2
I 0
I
0 I
-2
1
A=
82
0
(6.9.27)
I
-2
1
0 0 0
1
-2
The matrix A
is
of order m -
I.
In the definitions of u and
g,
the superscript T
indicates matrix transpose, so that u and g are column vectors of length m -
I.
!
I
I
j
416 NUMERICAL METHODS FOR ORDINARY DIFFERENTIAL EQUATIONS
U:sing these matrices, Eqs. (6.9.23)-(6.9.25) can
be
rewritten as
u'(
t)
=
Au(
t) +
g(
t)
u(O)
= u
0
(6.9.28)
If
Euler's method is applied, we have the numerical method
(6.9.29)
with
tn
= nh
and
vn
= u(tn). This is a well-known numerical method for the heat
equation, called the simple explicit method.
We
analyze the stability
of
(6.9.29)
and
some other methods for solving (6.9.28).
Equation
(6.9.28) is in the form of the model equation, (6.9.1),
and
therefore
we
need
the
eigenvalues
of
A to examine the stiffness
of
the system.
It
can be
shown
that
these eigenvalues are all real and are given
by
1
~j
~
m
-1
(6.9.30)
We
leave
the
proof
of
this to Problem 6 in Chapter 7. Directly examining this
formula,
(6.9.31)
A =
-stn
2
=-
-4
. (
(m-
1)'11) .
-4
m-1
82
2m
82
with
the
approximations valid for larger m.
It
can
be
seen
that
(6.9.28) is a stiff
system
if
8 is small.
Applying (6.9.31) and (6.8.49) to the analysis
of
stability
in
(6.9.29), we must
have
j=1,
...
,m-1
Using (6.9.30), this leads to the equivalent statement
4h (
j'IT
)
0 <
2
sin
2
- < 2
8
2m
1~j~m-1
This will
be
satisfied if
4hj8
2
~
2,
or
{6.9.32)
If
8 is
at
all small, say 8 = .01, then the time step h must
be
quite small to have
stability,
;
... ·l
········-···.!
STIFF DIFFERENTIAL EQUATIONS AND THE METHOD
OF
LINES
417
In
contrast
to
the restriction (6.9.32) with Euler's method, the
backward
Euler
method
has
no
such restriction since
it
is A-stable.
The
method
becomes
(6.9.33)
To
solve this linear problem for
Vn+l•
(6.9.34)
This
is a tridiagonal system
of
linear
equations
(see Section 8.3).
It
can
be
solved
very rapidly,
with
approximately 5m
arithmetic
operations
per
time step, exclud-
ing
the
cost
of
computing
the right side
in
(6.9.34).
The
cost
of
solving the
Euler
method
(6.9.29) is
almost
as great,
and
thus
the
solution
of
(6.9.34) is
not
especially time-consuming.
Example Solve the
partial
differential
equation
problem
(6.9.19)-(6.9.21) with
the functions
G,
d
0
,
d
1
,
and
f determined
from
the
known
solution
U = e
-.lr
sin
('IT
X)
O~x~1
t~O
(6.9.35)
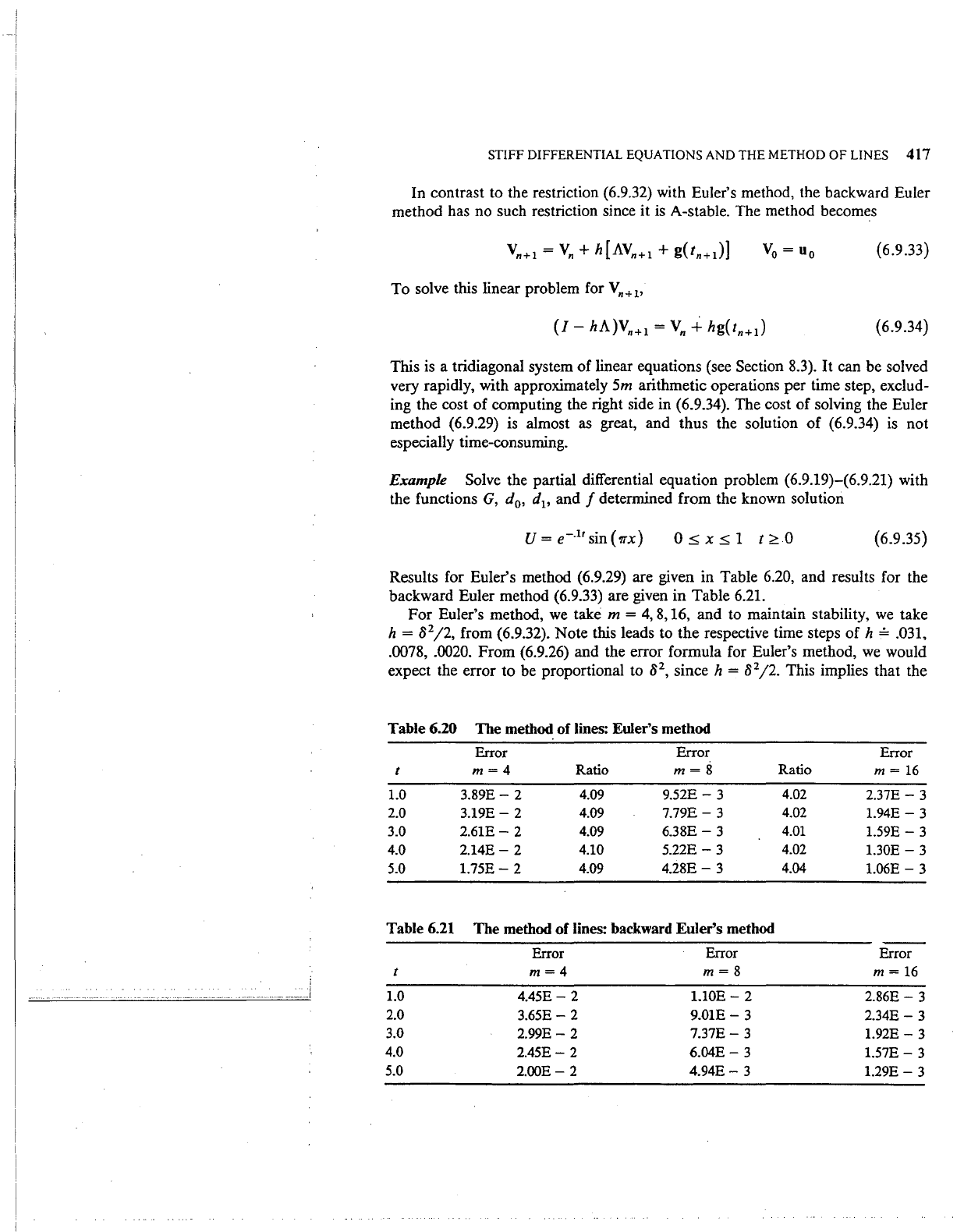
Results for Euler's
method
(6.9.29)
are
given
in
Table
6.20,
and
results for
the
backward
Euler
method
(6.9.33)
are
given
in
Table
6.21.
For
Euler's method,
we
take m = 4, 8, 16,
and
to
maintain
stability, we
take
h = S
2
/2,
from
(6.9.32).
Note
this leads
to
the
respective time steps
of
h
~
.031,
.0078, .0020.
From
(6.9.26)
and
the
error
formula
for Euler's
method,
we
would
expect
the
error
to
be
proportional
to
8
2
,
since
h = 8
2
/2.
This
implies
that
the
Table6.20
The method
of
lines:
Euler's
method
Error
Error Error
t
m=4
Ratio
m=
8
Ratio
m =
16
1.0
3.89E-
2
4.09
9.52E-
3
4.02
2.37E-
3
2.0
3.19E-
2 4.09
7.79E-
3
4.02
1.94E-
3
3.0
2.61E-
2
4.09
6.38E-
3
4.01
1.59E-
3
4.0
2.14E-
2 4.10
5.22E-
3 4.02
1.30E-
3
5.0
1.75E-
2 4.09
4.28E-
3 4.04
1.06E-
3
Table
6.21
The
method
of
lines: backward
Euler's
method
Error
Error
Error
t
m=4
m = 8
m =
16
1.0
4.45E-
2
l.lOE-
2
2.86E-
3
2.0
3.65E-
2
9.01E-
3
2.34E-
3
3.0
2.99E-
2
7.37E-
3
1.92E-
3
4.0
2.45E-
2
6.04E-
3
1.57E-
3
5.0
2.00E-
2
4.94E-
3
1.29E-
3
·;·
'
)
'
I
.J
418
NUMERlcAL
METHODS FOR ORDINARY DIFFERENTIAL EQUATIONS
error should decrease by a factor of 4 when m
is
doubled, and the results in
·Table 6.20 agree. In the table, the column Error denotes the maximum error at
the node points
(xj,
t), 0
5.j
5.
n, for the given value
oft.
For
the solution of (6.9.28) by the backward Euler method, there need no
longer
be
any connection between the space step 8 and the time step
h.
By
observing the error formula (6.9.26) for the method of lines and the truncation
error formula
(6.9.7) (use p =
1)
for the backward Euler method,
we
see that the
error in solving the problem
(6.9.19)-(6.9.21) will be proportional to h + 8
2
•
For
the unknown function U of (6.9.34), there
is
a slow variation with t. Thus for the
truncation error associated with the time integration, we should be able to use a
relatively large time step
h
as
compared to the space step
8,
in order to have the
two sources of error be relatively equal in size. In Table
6.21,
we
use h =
.1
and
m
==:'
4,
8, 16. Note that this time step
is
much larger than that used in Table 6.20
for Euler's method, and thus the backward Euler method
is
much more efficient
for this particular example.
For
more
discu~sion
of the method of lines, see Aiken (1985, pp. 124-148).
For
some method-of-lines codes to solve systems
of
nonlinear parabolic partial
differential equations, in one and
two
space variables, see Sincovec and Madsen
(1975)
and
Melgaard and Sincovec (1981).
6.10 Single-Step
and
Runge-Kutta Methods
Single-step methods for solving
y'
=
f(x,
y)
require only a knowledge of the
numerical solution
Yn
in order to compute the next value Yn+l· This has obvious
advantages over the p-step multistep methods that use several past values
{Jn,
...
,
Yn-p+d,
since then the additional initial values
{y
1
,.
•.
,
Yp-d
have to
be computed by some other numerical method.
The best known one-step methods are the
Runge-Kutta
methods. They are
fairly simple to program, and their truncation error can be controlled in a more
straightforward manner than for the multistep methods. For the fixed-order
multistep methods that were used more commonly in the past, the
Runge-
Kutta
methods were the usual tool
for· calculating the needed initial values for the
multistep method. The major disadvantage of the
Runge-Kutta
methods
is
that
they use many more evaluations of the derivative
f(x,
y)
to attain the same
accuracy, as compared with the multistep methods. Later
we
will mention some
results on comparisons of variable-order Adams codes and fixed-order
Runge-Kutta
codes.
The most simple one-step method
is
based on using the Taylor series. Assume
Y(
x)
is r + 1 times continuously differentiable, where
Y(
x)
is
the solution of the
initial value problem
y'
=
/(x,
y)
(6.10.1)
Expand Y(x
1
)
about x
0
using Taylor's theorem:
h'
hr+l
Y(x
1
)
=
Y(x
0
)
+
hY'(x
0
)
+ · · ·
+-
y<r>(x
0
)
+ ( )
y<r+~>a)
(6.10.2)
r! . r + 1 !
.....
~
.....
J
SINGLE-STEP AND
RUNGE-KUTIA
METHODS 419
for some x
0
~
Eo~
Xp
B:)'
dropping the remainder term,
we
have an approxima-
tion for
Y(x
1
),
provided
we
can calculate
Y"(x
0
);
••••
y<r>(x
0
).
Differentiate
Y'(x)
=
f(x,
Y(x)) to obtain
Y"(x)
=
jx(x,
Y(x))
+ fv(x,
Y(x))Y'(x),
Y" =
fx
+ /y/
and proceed similarly to obtain the higher order derivatives of
Y(
x
).
Example Consider the problem
y(O)
= 1
with the solution
Y(x)
=
1/(1
+
x).
Then
Y"
=
-2YY'
= 2Y
3
,
and (6.10.2)
with r = 2 yields
We drop the remainder to obtain an approximation of
Y(x
1
).
This can then be
used in the same manner to obtain an approximation for
Y(x
2
),
and so on. The
numerical method
is
n~O
(6.10.3)
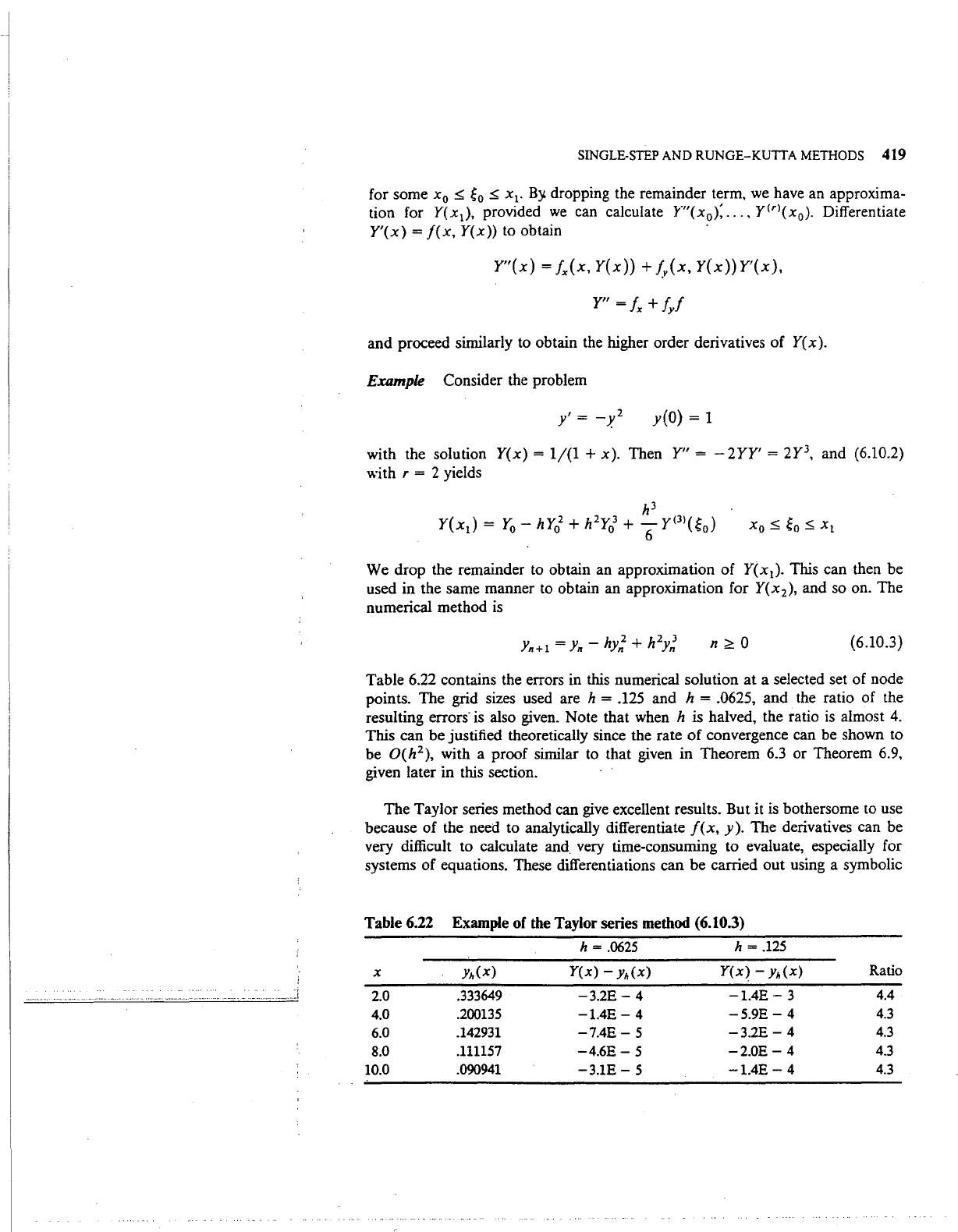
Table 6.22 contains the errors in this numerical solution
at
a selected set of node
points. The grid sizes used are
h = .125 and h = .0625, and the ratio of the
resulting errors·
is
also given. Note that when h is halved, the ratio
is
almost
4.
This can be justified theoretically since the rate of convergence can be shown to
be
O(h
2
),
with a proof similar to that given in Theorem
6.3
or Theorem 6.9,
given later in this section.
The Taylor series method can
give
excellent results. But it
is
bothersome to use
because of the need to analytically differentiate
f(x,
y).
The derivatives can be
very difficult to calculate and. very time-consuming to evaluate, especially for
systems of equations. These differentiations can be carried out using a symbolic
Table 6.22
Example of the Taylor series method (6.10.3)
h =
.0625
h =
.125
X
Y~r(x)
Y(x)-
Y~r(x)
Y(x)-
Y~r(x)
Ratio
2.0
.333649
-3.2E-
4
-1.4E-
3
4.4
4.0
.200135
-1.4E-
4
-5.9E-
4
4.3
6.0
.142931
-7.4E-5
-3.2E-
4
4.3
8.0
.111157
-4.6E-
5
-2.0E-
4
4.3
10.0
.090941
-3.1E-
5
-1.4E-
4
4.3
420 NUMERICAL METHODS FOR ORDINARY DIFFERENTIAL EQUATIONS
manipulation language on a computer, and then it is easy to produce a Taylor
series method. However, the derivatives are still likely to be quite time-consuming
to
evaluate,
and
it
appears that methods based
on
evaluating
just
f(x,
y)
will
remain more efficient.
To
imitate the Taylor series method, while evaluating only
f(x,
y),
we
tum
to the
Runge-Kutta
formulas.
Runge-Kutta
methods The
Runge-Kutta
methods are closely related to the
Taylor
series expansion
of
Y(x)
in (6.10.2),
but
no differentiations
of
f are
necessary
in
the use of the methods.
For
notational convenience, we abbreviate
Runge-Kutta
to RK. All
RK
methods will be written in the form
Yn+l
=
Yn
+ hF(xn,
Yn>
h;
/)
n;;::;O
(6.10.4)
We
begin with examples of the function
F,
and
will later discuss hypotheses for
it. But
at
this point, it should
be
intuitive that we want
F(x,
Y(x),
h;!)
~
Y'(x)
=
f(x,.Y(x))
(6.10.5)
for all small values
of
h. Define the truncation error for (6.10.4) by
n;;:: 0 (6.10.6)
and
define Tn(Y) implicitly by
Rearranging (6.10.6),
we
obtain
n;;:: 0 (6.10.7)
In
Theorem 6.9, this will be compared with (6.10.4) to prove convergence
of
{
Yn}
toY.
Example 1. Consider the trapezoidal method, solved with
one
iteration using
Euler's method as the predictor:
n
;;::
0 ( 6.10.8)
In
the notation of (6.10.4),
F(x,
y,
h;
f)=
Hf(x,
y)
+
J(x
+
h,
Y +
hf(x,
y))]
As
can
be
seen in Figure 6.9, F is an
average
slope
of
Y(x)
on
[x, x +
h].
2.
The following method is also based
on
obtaining an average slope for the
solution
on
[xn,
xn+d:
(6.10.9)